제 6 장 연습문제 풀이¶
목차
Basic(기초)
- B-1. 2차원 극좌표의 야코비안
- B-2. 3차원 구면좌표의 역계량
- B-3. 일반 2차원 계량의 행렬 표시
- B-4. 구면 위의 특정 점에서의 계량 텐서
- B-5. 선형 좌표 변환의 Jacobi 행렬
- B-6. 계량 텐서의 변환 법칙 적용
- B-7. 좌표 기저 벡터의 직교좌표 성분
- B-8. 역변환의 Jacobi 행렬의 행렬식
Medium(표준)
- M-1. 좌표변환 \((u, v)\) 와 계량 텐서
- M-2. 구좌표 선소의 도출
- M-3. 포물선 좌표의 계량 텐서
- M-4. 계량 텐서의 대칭성 증명
- M-5. 원통면의 계량과 평탄성
- M-6. 구면 위의 "원"의 기하학
- M-7. 계량 텐서의 변환 법칙에 의한 \(g'_{33}\) 의 도출
Advanced(발전)
Basic(기초)¶
B-1. 2차원 극좌표의 야코비안¶
→ 문제로 돌아가기
문제:
2차원 극좌표 \((r, \theta)\)에서 직교좌표 \((x, y)\)로의 야코비(Jacobi) 행렬
의 행렬식(야코비안) \(\det J\)를 구하세요.
풀이 방침: 야코비 행렬의 행렬식을 직접 계산해요.
야코비 행렬은:
행렬식을 계산하면:
검산: 극좌표의 넓이 요소 \(dA = r\,dr\,d\theta\) 의 야코비안이 \(r\) 인 것과 일치해요. 또한 \(r > 0\) 에서 정칙이며, \(r = 0\) (원점)에서 퇴화하는 것도 기하학적으로 올바른 결과예요.
B-2. 3차원 구면좌표의 역계량¶
→ 문제로 돌아가기
문제:
3차원 구면좌표 \((r, \theta, \varphi)\) 에서의 선소
로부터, 계량 텐서 \(g_{ij}\) 의 역행렬 \(g^{ij}\)(역계량(inverse metric))를 구하세요.
풀이 방침: 계량 텐서가 대각행렬이므로, 역행렬은 각 대각 성분의 역수를 취하면 돼요.
계량 텐서는:
대각행렬의 역행렬은 각 대각 성분의 역수이므로:
검산: \(g_{ij}\,g^{jk} = \delta_i^k\) 를 확인해요. 예를 들어 \((2,2)\) 성분: \(r^2 \cdot \dfrac{1}{r^2} = 1\). \((3,3)\) 성분: \(r^2\sin^2\theta \cdot \dfrac{1}{r^2\sin^2\theta} = 1\). 비대각 성분은 모두 0. 확실히 단위행렬이 돼요. ✓
B-3. 일반 2차원 계량의 행렬 표시¶
→ 문제로 돌아가기
문제:
2차원 좌표 \((u, v)\)에서 계량이
로 주어져 있어요. 계량 텐서 \(g_{ij}\)를 \(2 \times 2\) 행렬 형식으로 써 보세요.
풀이 방침: \(ds^2 = g_{ij}\,du^i\,du^j\) 를 전개하여 계수를 비교해요.
선소를 전개하면:
계량 텐서의 대칭성 \(g_{12} = g_{21}\) 을 사용하면, 교차항의 계수는 \(2g_{12}\) 이에요.
주어진 선소와 비교하면:
- \(g_{11} = 1 + u^2\)
- \(2g_{12} = 2uv \implies g_{12} = uv\)
- \(g_{22} = 1 + v^2\)
검산: 행렬식 \(\det g = (1+u^2)(1+v^2) - u^2v^2 = 1 + u^2 + v^2 > 0\) 이므로 양의 정부호이며, 리만 계량으로서 정합적이에요. ✓
B-4. 구면 위의 특정 점에서의 계량 텐서¶
→ 문제로 돌아가기
문제:
반지름 \(a\)인 구면의 계량
에서, 점 \((\theta, \varphi) = (\pi/3,\, 0)\)에서의 계량 텐서 \(g_{ij}\)의 성분을 구체적으로 써 보세요.
풀이 방침: \(\theta = \pi/3\) 를 계량 텐서의 성분에 대입해요.
구면의 계량 텐서는:
\(\theta = \pi/3\) 일 때 \(\sin(\pi/3) = \dfrac{\sqrt{3}}{2}\) 이므로 \(\sin^2(\pi/3) = \dfrac{3}{4}\) 이에요.
검산: \(\theta = \pi/2\) (적도)이면 \(g_{22} = a^2\) 로 최대, \(\theta = 0\) (북극)이면 \(g_{22} = 0\) 으로 퇴화해요. \(\theta = \pi/3\) 은 적도와 북극 사이이므로 \(g_{22} = \frac{3}{4}a^2\) 는 \(0\) 과 \(a^2\) 사이에 있어 타당해요. ✓
B-5. 선형 좌표 변환의 Jacobi 행렬¶
→ 문제로 돌아가기
문제:
2차원에서 좌표 \((x^1, x^2) = (x, y)\)로부터 \((u^1, u^2) = (u, v)\)로의 변환이
로 주어져 있어요. Jacobi 행렬 \(\dfrac{\partial x^i}{\partial u^j}\)를 구하세요.
풀이 방침: 각 편미분을 직접 계산해요.
\(x = u + v\), \(y = u - v\) 로부터:
검산: \(\det J = 1 \cdot (-1) - 1 \cdot 1 = -2 \neq 0\) 이므로 정칙이에요. 역변환 \(u = \frac{x+y}{2}\), \(v = \frac{x-y}{2}\) 가 존재하는 것과 부합해요. ✓
B-6. 계량 텐서의 변환 법칙 적용¶
→ 문제로 돌아가기
문제:
문제 B-5. 선형 좌표 변환의 Jacobi 행렬 의 좌표 변환에 대해, 직교 좌표의 계량 \(g_{ij} = \delta_{ij}\) 를 계량 텐서의 변환 법칙
을 이용하여 새로운 좌표 \((u, v)\) 에서의 계량 텐서 \(g'_{kl}\) 를 구하세요. 결과를 행렬 형식으로 쓰세요.
풀이 방침: \(g' = J^T g\,J = J^T J\) (\(g = \delta_{ij}\)이므로)를 계산해요.
각 성분을 계산해요:
- \((1,1)\): \(1 \cdot 1 + 1 \cdot 1 = 2\)
- \((1,2)\): \(1 \cdot 1 + 1 \cdot (-1) = 0\)
- \((2,1)\): \(1 \cdot 1 + (-1) \cdot 1 = 0\)
- \((2,2)\): \(1 \cdot 1 + (-1)(-1) = 2\)
즉, 선소는 \(ds^2 = 2\,du^2 + 2\,dv^2\)이 돼요.
검산: 직접 대입으로 확인해요. \(dx = du + dv\), \(dy = du - dv\)이므로:
B-7. 좌표 기저 벡터의 직교좌표 성분¶
→ 문제로 돌아가기
문제:
2차원 극좌표의 좌표 기저 벡터(coordinate basis vector) \(\boldsymbol{e}_\theta\)에 대해, 점 \(r = 3\), \(\theta = \pi/4\)에서의 직교좌표 성분 \((\boldsymbol{e}_\theta)^x\), \((\boldsymbol{e}_\theta)^y\)를 구하세요.
풀이 방침: \(\boldsymbol{e}_\theta\) 의 직교좌표 성분을 편미분으로 구하고, 구체적인 값을 대입해요.
좌표 기저벡터의 정의로부터:
\(x = r\cos\theta\), \(y = r\sin\theta\) 로부터:
\(r = 3\), \(\theta = \pi/4\) 를 대입하면, \(\sin(\pi/4) = \cos(\pi/4) = \dfrac{\sqrt{2}}{2}\) 이므로:
검산: \(\boldsymbol{e}_\theta\) 의 크기의 제곱은 \(|\boldsymbol{e}_\theta|^2 = \left(\frac{3\sqrt{2}}{2}\right)^2 + \left(\frac{3\sqrt{2}}{2}\right)^2 = \frac{18}{4} + \frac{18}{4} = 9 = r^2\). 이것은 계량 텐서의 \(g_{\theta\theta} = r^2 = 9\) 과 일치해요. ✓
B-8. 역변환의 Jacobi 행렬의 행렬식¶
→ 문제로 돌아가기
문제:
2차원 극좌표에서, 역변환의 Jacobi 행렬
의 행렬식 \(\det \tilde{J}\)를 구하고, 문제 B-1. 2차원 극좌표의 야코비안에서 구한 \(\det J\)와의 관계를 확인하세요.
풀이 방침: \(J\tilde{J} = I\) 의 관계로부터 행렬식의 관계를 유도해요.
\(J\tilde{J} = I\) 의 양변의 행렬식을 취하면:
문제 B-1. 2차원 극좌표의 야코비안 에서 \(\det J = r\) 이므로:
\(\det J\) 와 \(\det \tilde{J}\) 는 서로 역수 관계에 있어요.
검산: 역변환의 Jacobi 행렬을 직접 사용하여 확인해요. 본문에서:
Medium(표준)¶
M-1. 좌표변환 \((u, v)\) 와 계량 텐서¶
→ 문제로 돌아가기
문제:
참고 그림: 그림 5.1: 직교좌표와 극좌표
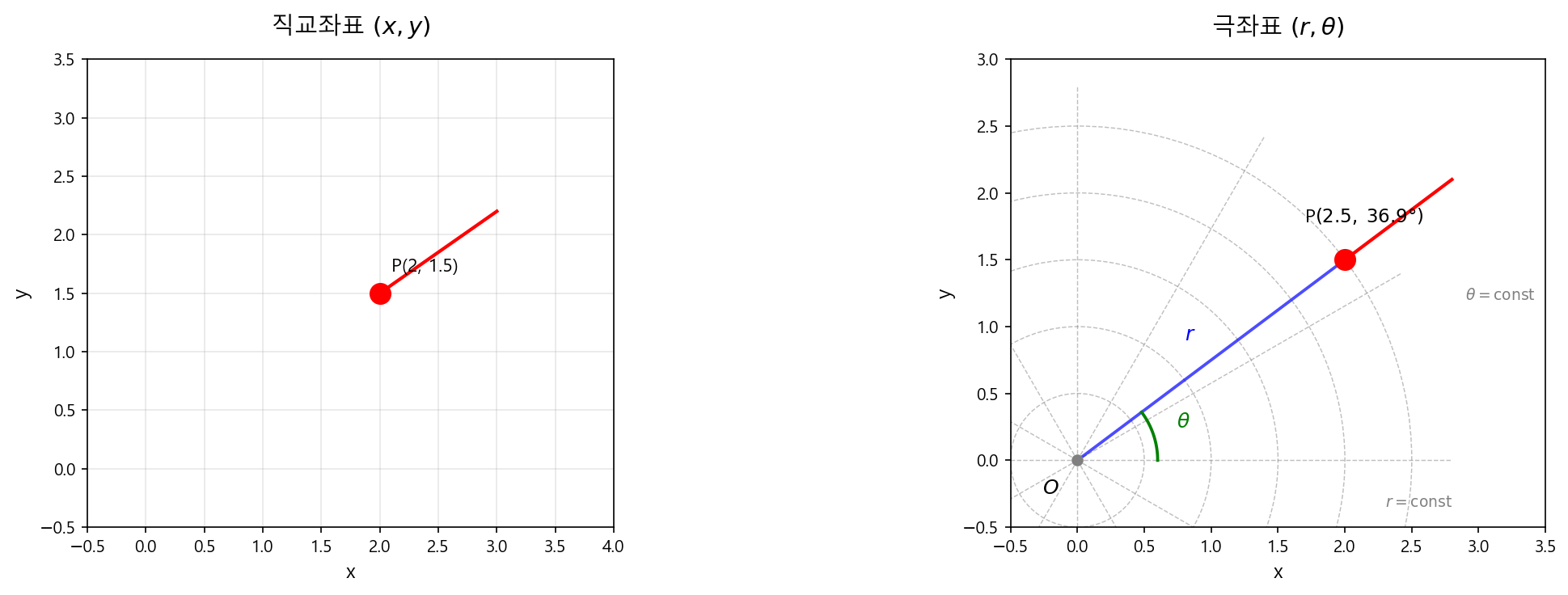{kind=link}
2차원 평면에서 좌표변환 \(u = x + y\), \(v = x - y\) 를 생각해요.
(a) 야코비 행렬 \(\dfrac{\partial(x, y)}{\partial(u, v)}\) 을 구하세요.
(b) 이 좌표계에서의 계량 텐서 \(g'_{ij}\) 를 변환 법칙을 이용하여 구하세요.
(c) \(ds^2 = dx^2 + dy^2\) 를 이 좌표로 다시 쓰고, (b)의 결과와 일치하는지 확인하세요.
풀이 방침: 역변환의 Jacobi 행렬을 구하고, 변환 법칙으로 계량 텐서를 유도한 뒤, 직접 대입으로 검증해요.
(a) Jacobi 행렬 \(\partial(x, y)/\partial(u, v)\):
좌표 변환 \(u = x + y\), \(v = x - y\) 의 역변환을 구해요. 연립방정식을 풀면,
Jacobi 행렬은,
(b) 변환 법칙에 의한 계량 텐서 \(g'_{ij}\) 의 유도:
변환 법칙 \(g'_{kl} = \dfrac{\partial x^i}{\partial u^k}\dfrac{\partial x^j}{\partial u^l}\,g_{ij}\) 를 사용해요. 원래 좌표의 계량은 \(g_{ij} = \delta_{ij}\)(직교 좌표)이므로, \(g' = J^T J\) 를 계산하면 돼요.
각 성분을 계산해요:
-
\((1,1)\): \(\dfrac{1}{2}\cdot\dfrac{1}{2} + \dfrac{1}{2}\cdot\dfrac{1}{2} = \dfrac{1}{4} + \dfrac{1}{4} = \dfrac{1}{2}\)
-
\((1,2)\): \(\dfrac{1}{2}\cdot\dfrac{1}{2} + \dfrac{1}{2}\cdot\left(-\dfrac{1}{2}\right) = \dfrac{1}{4} - \dfrac{1}{4} = 0\)
-
\((2,1)\): \(\dfrac{1}{2}\cdot\dfrac{1}{2} + \left(-\dfrac{1}{2}\right)\cdot\dfrac{1}{2} = \dfrac{1}{4} - \dfrac{1}{4} = 0\)
-
\((2,2)\): \(\dfrac{1}{2}\cdot\dfrac{1}{2} + \left(-\dfrac{1}{2}\right)\left(-\dfrac{1}{2}\right) = \dfrac{1}{4} + \dfrac{1}{4} = \dfrac{1}{2}\)
(c) 직접 대입에 의한 검증:
\(x = (u+v)/2\), \(y = (u-v)/2\) 로부터,
\(ds^2 = dx^2 + dy^2\) 에 대입하면,
이것은 (b)의 계량 텐서 \(g'_{ij} = \text{diag}(1/2,\, 1/2)\) 와 완전히 일치해요. ✓
검산: \(\det J = \dfrac{1}{2}\cdot\left(-\dfrac{1}{2}\right) - \dfrac{1}{2}\cdot\dfrac{1}{2} = -\dfrac{1}{2} \neq 0\) 이므로 정칙이에요. \(\det g' = 1/4 = (\det J)^2\) 도 정합해요. 계량이 대각이고 상수이므로, 이 좌표계는 직교 좌표계이며, 공간은 평탄해요(문제 M-5. 원통면의 계량과 평탄성 의 논의와 정합). ✓
M-2. 구좌표 선소의 도출¶
→ 문제로 돌아가기
문제:
3차원 구좌표 \((r, \theta, \varphi)\)의 선소
를, 직교좌표의 선소 \(ds^2 = dx^2 + dy^2 + dz^2\)와 좌표 변환
으로부터 도출하세요. 전미분 \(dx\), \(dy\), \(dz\)를 \((dr, d\theta, d\varphi)\)로 나타내고, 대입·정리하는 과정을 모두 보여주세요.
풀이 방침: \(x = r\sin\theta\cos\varphi\), \(y = r\sin\theta\sin\varphi\), \(z = r\cos\theta\) 의 전미분을 구하고, \(ds^2 = dx^2 + dy^2 + dz^2\) 에 대입해요.
전미분 계산:
\(dx\) 계산:
\(dy\) 계산:
\(dz\) 계산:
\(dx^2\) 전개:
\(dy^2\) 전개:
\(dz^2\) 전개:
합산:
\(dr^2\) 의 계수:
\(d\theta^2\) 의 계수:
\(d\varphi^2\) 의 계수:
\(dr\,d\theta\) 의 계수:
\(dr\,d\varphi\) 의 계수:
\(d\theta\,d\varphi\) 의 계수:
최종 결과:
모든 교차항이 사라져서:
검산:
- \(\theta = \pi/2\) (\(xy\) 평면)로 제한하면 \(ds^2 = dr^2 + r^2\,d\varphi^2\) 가 되어, 2차원 극좌표의 선소와 일치해요. ✓
- 차원 분석: 각 항은 [길이]\(^2\) 의 차원을 가져요. ✓
M-3. 포물선 좌표의 계량 텐서¶
→ 문제로 돌아가기
문제:
2차원 포물선 좌표(parabolic coordinates) \((\sigma, \tau)\)가
로 정의되어 있어요.
(a) 야코비 행렬 \(\dfrac{\partial x^i}{\partial u^j}\) (여기서 \((u^1, u^2) = (\sigma, \tau)\))를 구하세요.
(b) 계량 텐서의 변환 법칙을 이용하여, 포물선 좌표에서의 계량 텐서 \(g'_{kl}\)를 유도하고, 선소 \(ds^2\)를 \((\sigma, \tau)\)로 나타내세요.
(a) 야코비 행렬:
\(x = \sigma\tau\), \(y = \frac{1}{2}(\tau^2 - \sigma^2)\) 로부터:
(b) 계량 텐서의 유도:
\(g' = J^T J\) 를 계산해요:
각 성분:
- \((1,1)\): \(\tau^2 + \sigma^2\)
- \((1,2)\): \(\tau\sigma - \sigma\tau = 0\)
- \((2,1)\): \(\sigma\tau - \tau\sigma = 0\)
- \((2,2)\): \(\sigma^2 + \tau^2\)
따라서 선소는:
검산: 계량이 등각적으로 평탄한(conformal to flat) 형태 \(ds^2 = \Omega^2(d\sigma^2 + d\tau^2)\) 로 되어 있어요. 이는 포물선 좌표가 직교 좌표계(\(g_{12} = 0\))임을 의미하며, 등각 사상의 성질과 일치해요.
또한, \(\det J = \tau^2 + \sigma^2\) 이고, \(\det g' = (\sigma^2 + \tau^2)^2 = (\det J)^2\) 이 성립하는 것도 확인할 수 있어요. ✓
M-4. 계량 텐서의 대칭성 증명¶
→ 문제로 돌아가기
문제:
참고 그림: 그림 5.2: 구면의 계량
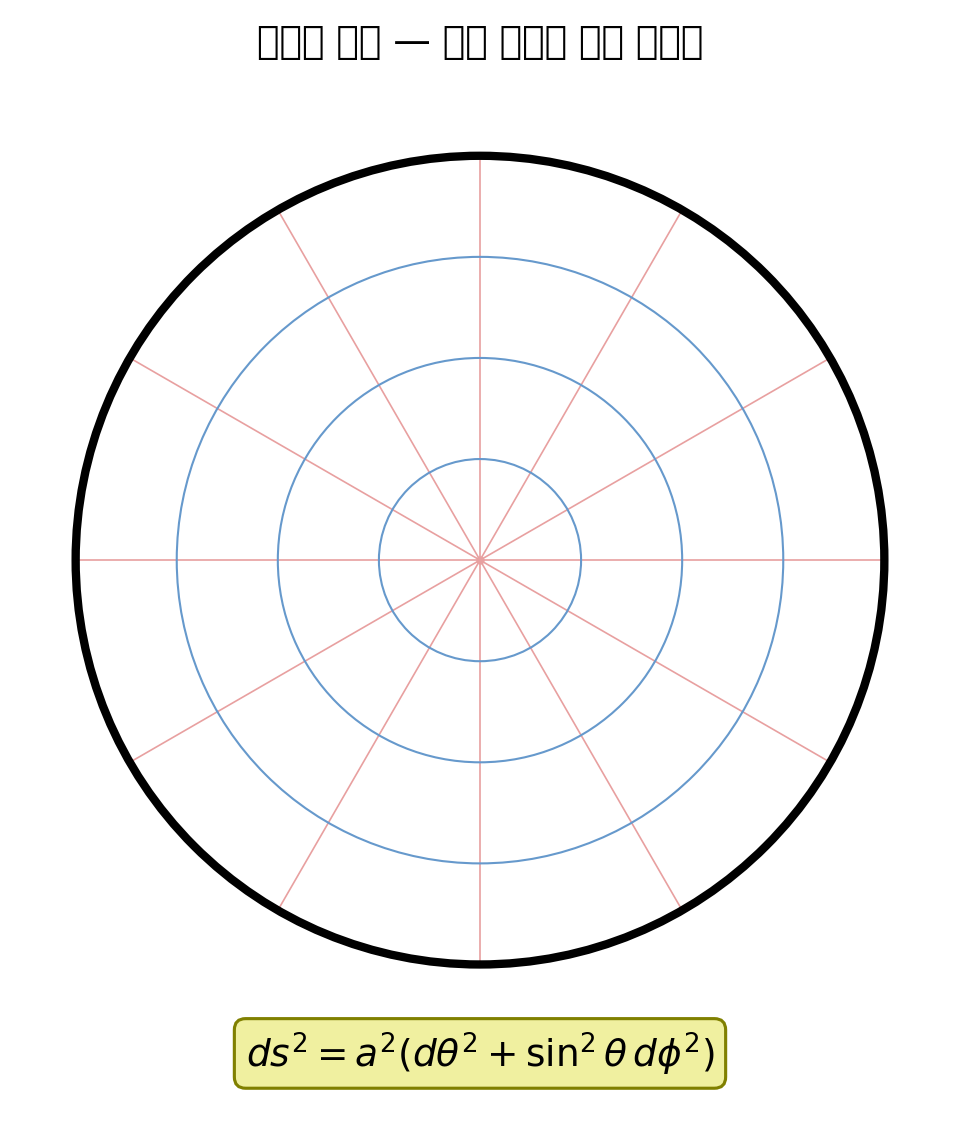{kind=link}
계량 텐서의 변환 법칙
으로부터, 계량 텐서가 대칭 텐서임을, 즉 \(g'_{kl} = g'_{lk}\)임을, 원래 좌표계에서의 대칭성 \(g_{ij} = g_{ji}\)를 가정하여 보여주세요.
풀이 방침: 변환 법칙의 우변에서 첨자를 교환하고, \(g_{ij} = g_{ji}\)를 이용해요.
계량 텐서의 변환 법칙은:
\(g'_{lk}\)를 써보면:
우변에서 더미 첨자 \(i\)와 \(j\)를 교환해요 (합산 첨자의 이름을 바꾸는 것뿐이므로 값은 변하지 않아요):
여기서 \(g_{ji} = g_{ij}\) (원래 좌표계에서의 대칭성 가정)를 이용하면:
따라서, 원래 좌표계에서 계량 텐서가 대칭이면, 임의의 좌표 변환 후에도 대칭성은 보존돼요. \(\blacksquare\)
검산: 문제 B-6. 계량 텐서의 변환 법칙 적용의 구체적인 예로 확인해요. \(g'_{kl} = \begin{pmatrix} 2 & 0 \\ 0 & 2 \end{pmatrix}\)는 명백히 대칭이에요. 문제 M-3. 포물선 좌표의 계량 텐서의 포물선 좌표에서도 \(g'_{12} = g'_{21} = 0\)으로 대칭이에요. ✓
M-5. 원통면의 계량과 평탄성¶
→ 문제로 돌아가기
문제:
반지름 \(a\)인 원통면(cylinder)을 좌표 \((\varphi, z)\)(\(\varphi\)는 둘레 방향의 각도, \(z\)는 높이)로 기술할 때, 선소는
가 돼요.
(a) 이 계량 텐서 \(g_{ij}\)를 행렬 형식으로 쓰세요.
(b) 원통면의 계량 텐서 성분은 좌표에 의존하지 않는 상수예요. 이것과 구면의 계량 텐서 성분이 \(\theta\)에 의존하는 사실을 대비하고, "계량 텐서의 성분이 상수 ⇒ 공간이 평탄하다"라는 주장이 올바른지 본 장의 내용에 기초하여 논하세요.
(a) 계량 텐서의 행렬 표시:
선소 \(ds^2 = a^2\,d\varphi^2 + dz^2\) 로부터:
(b) 계량 텐서가 상수인 것과 평탄성의 관계:
결론: 「계량 텐서의 성분이 상수 ⇒ 공간이 평탄하다」는 주장은 올바르다.
아래에 그 논거를 서술해요.
원통면이 평탄한 것:
원통면은 종이를 말아서 만들 수 있어요. 종이를 마는 조작은 종이 위의 거리 관계를 전혀 바꾸지 않으므로(늘어나거나 줄어들지 않으므로), 원통면의 내재적 기하는 평탄한 평면과 동일해요. 실제로 좌표 변환 \(s = a\varphi\)를 수행하면:
이 되며, 이것은 평면의 직교 좌표 선소 그 자체예요.
계량 텐서가 상수인 것의 의미:
계량 텐서의 성분이 모두 상수일 때, 좌표 변환(상수 행렬에 의한 선형 변환)을 통해 계량을 \(\delta_{ij}\)(단위 행렬)로 변환할 수 있어요. 구체적으로, \(g_{ij}\)가 양의 정부호 대칭 상수 행렬이면, 적절한 상수 행렬 \(A\)에 의해 \(A^T g A = I\)로 만들 수 있어요. 이 변환 후의 좌표는 직교 좌표 그 자체이며, 공간은 평탄해요.
구면과의 대비:
구면의 계량 텐서 \(g_{ij} = \begin{pmatrix} a^2 & 0 \\ 0 & a^2\sin^2\theta \end{pmatrix}\)는 \(\theta\)에 의존해요. 그러나 본 장에서 서술한 바와 같이, 계량 텐서가 좌표에 의존하는 것만으로는 공간이 휘어 있다고 말할 수 없어요(평탄한 평면의 극좌표에서도 \(g_{22} = r^2\)는 좌표에 의존해요). 공간이 정말로 휘어 있는지는 좌표 변환에 의해 계량 텐서를 상수(혹은 \(\delta_{ij}\))로 만들 수 있는지 여부로 판정돼요. 구면의 경우, 어떤 좌표 변환을 수행해도 계량 텐서를 상수로 만들 수 없으며, 이것이 구면이 내재적으로 휘어 있다는 것의 반영이에요(엄밀하게는 리만 곡률 텐서로 판정해요).
단, 역은 성립하지 않아요(평탄한 공간에서도 곡선 좌표를 사용하면 계량 텐서는 좌표에 의존해요).
M-6. 구면 위의 "원"의 기하학¶
→ 문제로 돌아가기
문제:
반지름 \(a\)인 구면 위에서, 북극(\(\theta = 0\))을 중심으로 하는 "원"(\(\theta = \theta_0\) = 일정한 선)을 생각해요.
(a) 이 원의 둘레 \(C\)를, 구면의 계량 \(ds^2 = a^2\,d\theta^2 + a^2\sin^2\theta\,d\varphi^2\)를 이용하여 구하세요.
(b) 북극에서 이 원까지의 구면 위의 거리(\(\varphi\) 일정인 경선을 따른 거리) \(r\)을 구하세요.
(c) \(C/(2\pi r)\)을 계산하고, \(\theta_0\)가 커지면 1보다 작아지는 것을 확인하세요. 이것은 구면이 양의 곡률을 가진다는 것의 표현이에요.
풀이 방침: 구면의 계량 \(ds^2 = a^2(d\theta^2 + \sin^2\theta\,d\varphi^2)\) 을 이용하여 원둘레와 거리를 계산해요.
(a) 원둘레 \(C\) 의 계산:
\(\theta = \theta_0\) = 일정한 선 위에서는 \(d\theta = 0\) 이므로, 선소는
\(\varphi\) 를 \(0\) 에서 \(2\pi\) 까지 적분하면,
(b) 북극으로부터의 구면 위 거리 \(r\):
북극(\(\theta = 0\))에서 \(\theta = \theta_0\) 인 선까지의 구면 위 거리는, \(\varphi\) = 일정한 대원을 따라 측정해요. \(d\varphi = 0\) 이므로,
\(\theta\) 를 \(0\) 에서 \(\theta_0\) 까지 적분하면,
(c) \(C/(2\pi r)\) 의 계산:
\(\theta_0\) 가 커지면 1보다 작아지는 것의 확인:
\(\theta_0 > 0\) 일 때, \(\sin\theta_0 < \theta_0\) 가 성립해요 (\(\sin x < x\) for \(x > 0\)). 따라서,
\(\theta_0 \to 0\) 의 극한에서는 \(\sin\theta_0/\theta_0 \to 1\) 이 되어, 충분히 작은 원에서는 평탄한 공간과 같은 비 \(C = 2\pi r\) 이 회복돼요. \(\theta_0\) 가 커짐에 따라 비는 1에서 감소하며, \(\theta_0 = \pi/2\) (적도)에서는 \(C/(2\pi r) = \sin(\pi/2)/(\pi/2) = 2/\pi \approx 0.637\) 이 돼요.
물리적 의미: 평탄한 공간에서는 원둘레와 반지름의 비가 항상 \(C = 2\pi r\) (\(C/(2\pi r) = 1\))이에요. 구면 위에서 이 비가 1보다 작다는 것은 구면이 양의 곡률을 갖는다는 것의 직접적인 반영이에요. 양의 곡률을 가진 공간에서는 중심으로부터의 거리에 비해 원둘레가 "부족해요"——평탄한 공간의 경우보다 짧아져요. 이것은 구면의 내재적인 기하학적 성질이며, 계량 텐서로부터 직접 계산할 수 있는 양이에요.
검산: \(\theta_0 = \pi\) (남극을 둘러싸는 "원")에서는 \(C = 2\pi a\sin\pi = 0\), \(r = a\pi\). 남극은 한 점이므로 원둘레가 0이 되는 것은 올바른 결과예요. ✓
\(\theta_0 \to 0\) 에서 테일러 전개하면 \(\sin\theta_0 \approx \theta_0 - \theta_0^3/6\) 이므로 \(C/(2\pi r) \approx 1 - \theta_0^2/6\) 이에요. 곡률 \(K = 1/a^2\) 인 구면에서는 \(C/(2\pi r) \approx 1 - Kr^2/6\) 이 성립하는 것이 알려져 있으며, \(r = a\theta_0\) 를 대입하면 \(1 - (1/a^2)(a\theta_0)^2/6 = 1 - \theta_0^2/6\) 으로 일치해요. ✓
M-7. 계량 텐서의 변환 법칙에 의한 \(g'_{33}\) 의 도출¶
→ 문제로 돌아가기
문제:
계량 텐서의 변환 법칙
을 이용하여, 3차원 구좌표의 계량 \(g'_{33} = r^2\sin^2\theta\) 를 직교좌표의 계량 \(g_{ij} = \delta_{ij}\) 로부터 도출하세요. (힌트: \(\dfrac{\partial x}{\partial \varphi} = -r\sin\theta\sin\varphi\), \(\dfrac{\partial y}{\partial \varphi} = r\sin\theta\cos\varphi\), \(\dfrac{\partial z}{\partial \varphi} = 0\) 을 사용하세요.)
풀이 방침: 구면좌표 \((r, \theta, \varphi)\)와 직교좌표 \((x, y, z)\)의 관계로부터 변환 법칙을 이용하여 \(g'_{33} = r^2\sin^2\theta\)를 유도해요.
계산:
좌표의 대응: \(u^1 = r\), \(u^2 = \theta\), \(u^3 = \varphi\)로 놓고, \(x^1 = x\), \(x^2 = y\), \(x^3 = z\)로 놓아요.
변환 법칙은,
(\(g_{ij} = \delta_{ij}\)이므로 \(i = j\)인 항만 남아요.)
좌표 변환 \(x = r\sin\theta\cos\varphi\), \(y = r\sin\theta\sin\varphi\), \(z = r\cos\theta\)로부터 각 편미분을 계산해요:
변환 법칙에 대입하면,
이는 구면좌표의 계량 텐서의 \((3,3)\) 성분으로 알려진 값과 일치해요.
검산: 문제 M-2. 구좌표 선소의 도출에서 직접 대입으로 유도한 구면좌표의 선소 \(ds^2 = dr^2 + r^2\,d\theta^2 + r^2\sin^2\theta\,d\varphi^2\)의 \(d\varphi^2\) 계수와 일치해요. ✓
\(\theta = \pi/2\) (적도면)에서는 \(g'_{33} = r^2\)가 되어, 2차원 극좌표의 \(g_{\varphi\varphi} = r^2\)로 귀착돼요. ✓
\(\theta = 0\) (\(z\) 축 위)에서는 \(g'_{33} = 0\)이 되어, \(\varphi\) 좌표가 퇴화하는 것(\(z\) 축 위에서는 \(\varphi\)의 변화가 거리에 기여하지 않는 것)과 정합해요. ✓
Advanced(발전)¶
A-1. 일반 곡선좌표의 계량 텐서¶
→ 문제로 돌아가기
문제:
2차원 평면 위에 다음과 같은 "일반 곡선좌표" \((u^1, u^2)\)를 생각해요:
여기서 \(f\), \(g\)는 충분히 매끄러운 함수이고 야코비 행렬은 정칙이라고 해요.
(a) 이 좌표에서의 계량 텐서 \(g_{ij}\)를 \(f\), \(g\)의 편미분으로 나타내세요.
(b) 좌표 기저벡터 \(\boldsymbol{e}_1\), \(\boldsymbol{e}_2\)가 직교하는(\(g_{12} = 0\)) 조건을 \(f\), \(g\)의 편미분을 이용하여 써 보세요.
(c) 극좌표와 포물선좌표(문제 M-3. 포물선 좌표의 계량 텐서 참조) 각각에 대해, (b)의 직교 조건이 만족되는지 확인하세요.
(a) 계량 텐서의 유도:
\(x = f(u^1, u^2)\), \(y = g(u^1, u^2)\) 에 대해, 직교좌표의 계량 \(ds^2 = dx^2 + dy^2\) 를 변환해요.
전미분은:
\(ds^2 = dx^2 + dy^2 = g_{ij}\,du^i\,du^j\) 로부터:
약기로 \(f_i \equiv \dfrac{\partial f}{\partial u^i}\), \(g_i \equiv \dfrac{\partial g}{\partial u^i}\) 라고 쓰면:
성분을 명시하면:
(b) 직교 조건:
좌표 기저벡터가 직교하는 조건 \(g_{12} = 0\) 은:
이것은 두 좌표 기저벡터 \(\boldsymbol{e}_1 = (f_1, g_1)\) 과 \(\boldsymbol{e}_2 = (f_2, g_2)\) 의 내적이 0임을 의미해요.
(c) 구체적 예시의 확인:
극좌표 \((u^1, u^2) = (r, \theta)\):
\(f = r\cos\theta\), \(g = r\sin\theta\) 로부터:
직교 조건을 확인:
극좌표는 직교좌표계예요.
포물선 좌표 \((u^1, u^2) = (\sigma, \tau)\):
\(f = \sigma\tau\), \(g = \frac{1}{2}(\tau^2 - \sigma^2)\) 로부터:
직교 조건을 확인:
포물선 좌표도 직교좌표계예요.
검산: 문제 M-3. 포물선 좌표의 계량 텐서 에서 구한 포물선 좌표의 계량 텐서가 대각행렬(\(g_{12} = 0\))이었던 것과 일치해요. 극좌표의 계량 \(ds^2 = dr^2 + r^2\,d\theta^2\) 도 대각이므로 정합해요. ✓
A-2. Rindler 좌표¶
→ 문제로 돌아가기
문제:
{kind=link}
Minkowski(민코프스키) 시공간의 선소
에 대해, Rindler(린들러) 좌표 \((\eta, \xi)\)를
로 도입해요(\(y\), \(z\) 방향은 변환하지 않아요).
(a) Jacobi 행렬의 성분 \(\dfrac{\partial(ct)}{\partial \eta}\), \(\dfrac{\partial(ct)}{\partial \xi}\), \(\dfrac{\partial x}{\partial \eta}\), \(\dfrac{\partial x}{\partial \xi}\)를 구하세요.
(b) 계량 텐서의 변환 법칙을 이용하여, Rindler 좌표에서의 선소가
가 됨을 보이세요.
(c) 이 계량 텐서의 \(g_{\eta\eta} = -\xi^2\) 성분이 \(\xi\)에 의존하고 있어요. 이것은 제 5 장의 등가 원리(equivalence principle) 논의——"균일한 중력장 안에서는 위치에 따라 시간의 흐름이 다르다"——와 어떻게 관련되는지, 물리적 의미를 논하세요.
(a) 야코비 행렬의 성분:
\(ct = \xi\sinh\eta\), \(x = \xi\cosh\eta\) 로부터:
(행은 \((ct, x)\), 열은 \((\eta, \xi)\)에 대응)
(b) 린들러 좌표에서의 선소 유도:
민코프스키 계량은 \(g_{\mu\nu} = \text{diag}(-1, +1, +1, +1)\) 이에요. \(y\), \(z\) 방향은 변환하지 않으므로, \((ct, x)\) 부분만 고려해요.
변환 법칙 \(g'_{kl} = \dfrac{\partial x^\mu}{\partial u^k}\dfrac{\partial x^\nu}{\partial u^l}\,g_{\mu\nu}\) 를 적용해요.
\(g'_{\eta\eta}\) 계산:
여기서 쌍곡선 함수의 항등식 \(\cosh^2\eta - \sinh^2\eta = 1\) 을 사용했어요.
\(g'_{\xi\xi}\) 계산:
\(g'_{\eta\xi}\) 계산:
\(y\), \(z\) 방향은 변환하지 않으므로 \(g'_{yy} = 1\), \(g'_{zz} = 1\) 이에요.
따라서:
검산: \(\det J = \xi\cosh^2\eta - \xi\sinh^2\eta = \xi\) 이므로, \(\xi > 0\) 에서 정칙이에요. 또한, \(\xi = \text{const}\) 의 세계선은 \(x^2 - c^2t^2 = \xi^2\) 를 만족하며, 이는 쌍곡선으로서 등가속도 운동의 세계선에 대응해요. ✓
(c) 물리적 의미 고찰:
린들러 좌표는 균일한 가속도 \(a = c^2/\xi\) 로 등가속도 운동하는 관측자의 좌표계를 기술해요. 등가 원리에 의해, 이 좌표계는 균일한 중력장 속의 정지 좌표계와 국소적으로 등가예요.
\(g_{\eta\eta} = -\xi^2\) 가 \(\xi\)에 의존하는 것의 물리적 의미:
좌표 시간 \(\eta\)와 고유시 \(\tau\)의 관계는, 정지한 관측자(\(d\xi = dy = dz = 0\))에 대해:
(\(c = 1\) 단위계에서는 \(d\tau = \xi\,d\eta\))
이것은 같은 좌표 시간 \(d\eta\)가 경과하더라도, \(\xi\)의 값이 다른 장소에서는 고유시의 진행 속도가 다르다는 것을 의미해요. 구체적으로는:
- \(\xi\)가 큰 장소(가속 방향의 "위쪽", 중력장의 유추에서는 중력 퍼텐셜이 높은 장소)에서는 고유시가 빠르게 진행해요
- \(\xi\)가 작은 장소("아래쪽", 중력 퍼텐셜이 낮은 장소)에서는 고유시가 느리게 진행해요
- \(\xi \to 0\) 에서는 \(g_{\eta\eta} \to 0\) 이 되어, 고유시의 진행이 멈춰요(린들러 지평선)
이것은 바로 제 5 장에서 논의한 중력에 의한 시간 지연(gravitational time dilation)의 발현이에요. 등가 원리에 따르면, 균일한 중력장에서는 "높은 곳일수록 시간이 빠르게 진행"해요. 린들러 계량의 \(g_{\eta\eta} = -\xi^2\) 라는 \(\xi\) 의존성은, 이 효과를 계량 텐서의 언어로 정확하게 표현한 것이에요.
중력 적색편이와의 관계:
서로 다른 \(\xi\) 위치에 있는 두 관측자가 같은 좌표 시간 간격 \(\Delta\eta\)의 신호를 주고받으면, 각각의 고유 시간 간격은 \(\Delta\tau_1 = \xi_1\,\Delta\eta\), \(\Delta\tau_2 = \xi_2\,\Delta\eta\) 가 돼요. \(\xi_1 < \xi_2\) 일 때 \(\Delta\tau_1 < \Delta\tau_2\) 이며, "아래쪽"에서 발한 빛은 "위쪽"의 관측자에게 적색편이되어 보여요. 이것이 중력 적색편이(gravitational redshift)이며, 등가 원리로부터 직접 도출되는 귀결이에요.
보충: \(\xi = 0\) 은 린들러 지평선이라 불리며, 등가속도 관측자에서 볼 때 인과적으로 도달 불가능한 경계에 대응해요. 이것은 블랙홀의 사건의 지평선과의 유사성을 가지며, 일반상대론의 지평선 물리를 이해하기 위한 중요한 모형이 되고 있어요.
Feedback on this page
Let us know if something was unclear, incorrect, or could be improved.