제 6 장 연습문제¶
목차
Basic(기초)
- B-1. 2차원 극좌표의 야코비안
- B-2. 3차원 구면좌표의 역계량
- B-3. 일반 2차원 계량의 행렬 표시
- B-4. 구면 위의 특정 점에서의 계량 텐서
- B-5. 선형 좌표 변환의 Jacobi 행렬
- B-6. 계량 텐서의 변환 법칙 적용
- B-7. 좌표 기저 벡터의 직교좌표 성분
- B-8. 역변환의 Jacobi 행렬의 행렬식
Medium(표준)
- M-1. 좌표변환 \((u, v)\) 와 계량 텐서
- M-2. 구좌표 선소의 도출
- M-3. 포물선 좌표의 계량 텐서
- M-4. 계량 텐서의 대칭성 증명
- M-5. 원통면의 계량과 평탄성
- M-6. 구면 위의 "원"의 기하학
- M-7. 계량 텐서의 변환 법칙에 의한 \(g'_{33}\) 의 도출
Advanced(발전)
Basic(기초)¶
B-1. 2차원 극좌표의 야코비안¶
2차원 극좌표 \((r, \theta)\)에서 직교좌표 \((x, y)\)로의 야코비(Jacobi) 행렬
의 행렬식(야코비안) \(\det J\)를 구하세요.
힌트
\(J = \begin{pmatrix} \cos\theta & -r\sin\theta \\ \sin\theta & r\cos\theta \end{pmatrix}\)의 행렬식을 계산해요.
→ 풀이 보기
B-2. 3차원 구면좌표의 역계량¶
3차원 구면좌표 \((r, \theta, \varphi)\) 에서의 선소
로부터, 계량 텐서 \(g_{ij}\) 의 역행렬 \(g^{ij}\)(역계량(inverse metric))를 구하세요.
힌트
\(g_{ij}\) 가 대각행렬일 때, 역행렬의 각 대각성분은 원래 대각성분의 역수가 돼요.
→ 풀이 보기
B-3. 일반 2차원 계량의 행렬 표시¶
2차원 좌표 \((u, v)\)에서 계량이
로 주어져 있어요. 계량 텐서 \(g_{ij}\)를 \(2 \times 2\) 행렬 형식으로 써 보세요.
힌트
\(ds^2 = g_{ij}\,du^i\,du^j\)를 전개했을 때, 교차항 \(du\,dv\)의 계수는 \(g_{12} + g_{21}\)이며, 계량 텐서의 대칭성 \(g_{12} = g_{21}\)을 이용해요.
→ 풀이 보기
B-4. 구면 위의 특정 점에서의 계량 텐서¶
반지름 \(a\)인 구면의 계량
에서, 점 \((\theta, \varphi) = (\pi/3,\, 0)\)에서의 계량 텐서 \(g_{ij}\)의 성분을 구체적으로 써 보세요.
힌트
\(\sin(\pi/3) = \sqrt{3}/2\)를 대입해요.
→ 풀이 보기
B-5. 선형 좌표 변환의 Jacobi 행렬¶
2차원에서 좌표 \((x^1, x^2) = (x, y)\)로부터 \((u^1, u^2) = (u, v)\)로의 변환이
로 주어져 있어요. Jacobi 행렬 \(\dfrac{\partial x^i}{\partial u^j}\)를 구하세요.
힌트
\(\partial x/\partial u\)、\(\partial x/\partial v\)、\(\partial y/\partial u\)、\(\partial y/\partial v\)를 각각 편미분으로 계산해요.
→ 풀이 보기
B-6. 계량 텐서의 변환 법칙 적용¶
문제 B-5. 선형 좌표 변환의 Jacobi 행렬 의 좌표 변환에 대해, 직교 좌표의 계량 \(g_{ij} = \delta_{ij}\) 를 계량 텐서의 변환 법칙
을 이용하여 새로운 좌표 \((u, v)\) 에서의 계량 텐서 \(g'_{kl}\) 를 구하세요. 결과를 행렬 형식으로 쓰세요.
힌트
문제 B-5. 선형 좌표 변환의 Jacobi 행렬 에서 구한 야코비 행렬 \(J\) 를 사용하여, \(g' = J^T g\, J = J^T J\) 를 계산해요.
→ 풀이 보기
B-7. 좌표 기저 벡터의 직교좌표 성분¶
2차원 극좌표의 좌표 기저 벡터(coordinate basis vector) \(\boldsymbol{e}_\theta\)에 대해, 점 \(r = 3\), \(\theta = \pi/4\)에서의 직교좌표 성분 \((\boldsymbol{e}_\theta)^x\), \((\boldsymbol{e}_\theta)^y\)를 구하세요.
힌트
\(\boldsymbol{e}_\theta = \dfrac{\partial x}{\partial \theta}\,\boldsymbol{e}_x + \dfrac{\partial y}{\partial \theta}\,\boldsymbol{e}_y\)에 \(r = 3\), \(\theta = \pi/4\)를 대입해요.
→ 풀이 보기
B-8. 역변환의 Jacobi 행렬의 행렬식¶
2차원 극좌표에서, 역변환의 Jacobi 행렬
의 행렬식 \(\det \tilde{J}\)를 구하고, 문제 B-1. 2차원 극좌표의 야코비안에서 구한 \(\det J\)와의 관계를 확인하세요.
힌트
\(J \tilde{J} = I\)(단위행렬)인 것으로부터, 행렬식의 관계 \(\det J \cdot \det \tilde{J} = 1\)을 사용해요.
→ 풀이 보기
Medium(표준)¶
M-1. 좌표변환 \((u, v)\) 와 계량 텐서¶
참고 그림: 그림 5.1: 직교좌표와 극좌표
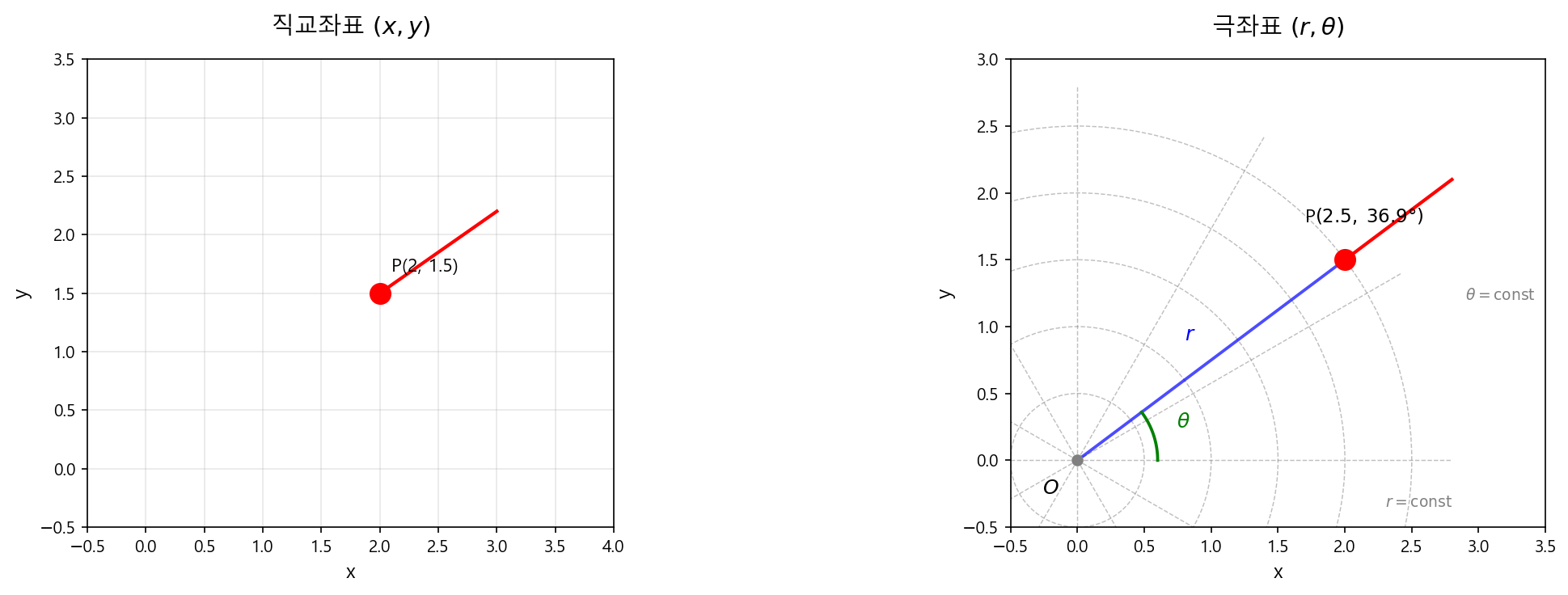{kind=link}
2차원 평면에서 좌표변환 \(u = x + y\), \(v = x - y\) 를 생각해요.
(a) 야코비 행렬 \(\dfrac{\partial(x, y)}{\partial(u, v)}\) 을 구하세요.
(b) 이 좌표계에서의 계량 텐서 \(g'_{ij}\) 를 변환 법칙을 이용하여 구하세요.
(c) \(ds^2 = dx^2 + dy^2\) 를 이 좌표로 다시 쓰고, (b)의 결과와 일치하는지 확인하세요.
→ 풀이 보기
M-2. 구좌표 선소의 도출¶
3차원 구좌표 \((r, \theta, \varphi)\)의 선소
를, 직교좌표의 선소 \(ds^2 = dx^2 + dy^2 + dz^2\)와 좌표 변환
으로부터 도출하세요. 전미분 \(dx\), \(dy\), \(dz\)를 \((dr, d\theta, d\varphi)\)로 나타내고, 대입·정리하는 과정을 모두 보여주세요.
힌트
\(dx\), \(dy\), \(dz\) 각각의 전미분을 구한 후, \(dx^2 + dy^2 + dz^2\)를 전개해요. 교차항(\(dr\,d\theta\) 등)이 모두 사라지는 것을 삼각함수의 항등식으로 확인해요.
→ 풀이 보기
M-3. 포물선 좌표의 계량 텐서¶
2차원 포물선 좌표(parabolic coordinates) \((\sigma, \tau)\)가
로 정의되어 있어요.
(a) 야코비 행렬 \(\dfrac{\partial x^i}{\partial u^j}\) (여기서 \((u^1, u^2) = (\sigma, \tau)\))를 구하세요.
(b) 계량 텐서의 변환 법칙을 이용하여, 포물선 좌표에서의 계량 텐서 \(g'_{kl}\)를 유도하고, 선소 \(ds^2\)를 \((\sigma, \tau)\)로 나타내세요.
힌트
\(g' = J^T J\)를 계산하세요. 결과가 \((\sigma^2 + \tau^2)\)라는 공통 인수로 정리되는 것을 확인하세요.
→ 풀이 보기
M-4. 계량 텐서의 대칭성 증명¶
참고 그림: 그림 5.2: 구면의 계량
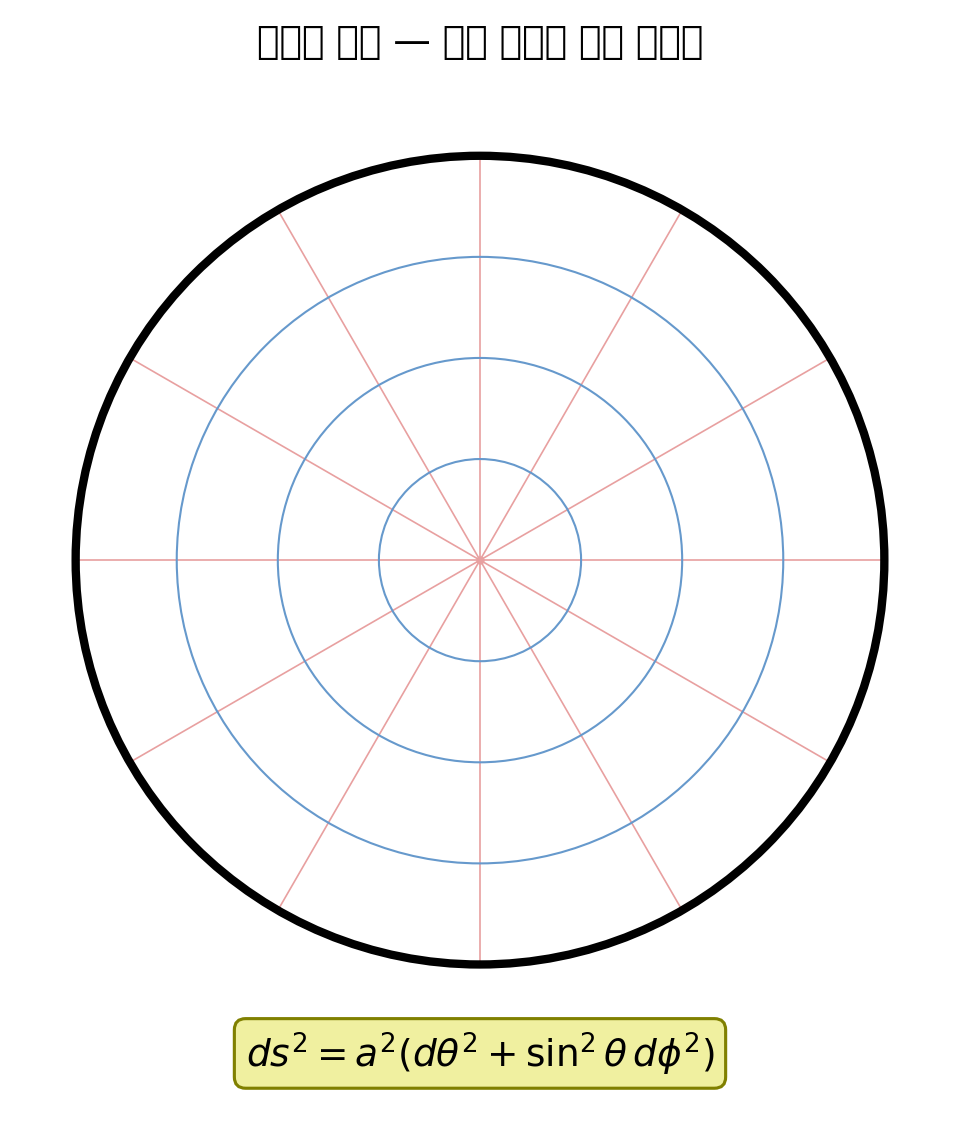{kind=link}
계량 텐서의 변환 법칙
으로부터, 계량 텐서가 대칭 텐서임을, 즉 \(g'_{kl} = g'_{lk}\)임을, 원래 좌표계에서의 대칭성 \(g_{ij} = g_{ji}\)를 가정하여 보여주세요.
힌트
변환 법칙의 우변에서 첨자 \(i\)와 \(j\)를 교환하고, \(g_{ij} = g_{ji}\)와 합산 첨자의 치환을 이용하세요.
→ 풀이 보기
M-5. 원통면의 계량과 평탄성¶
반지름 \(a\)인 원통면(cylinder)을 좌표 \((\varphi, z)\)(\(\varphi\)는 둘레 방향의 각도, \(z\)는 높이)로 기술할 때, 선소는
가 돼요.
(a) 이 계량 텐서 \(g_{ij}\)를 행렬 형식으로 쓰세요.
(b) 원통면의 계량 텐서 성분은 좌표에 의존하지 않는 상수예요. 이것과 구면의 계량 텐서 성분이 \(\theta\)에 의존하는 사실을 대비하고, "계량 텐서의 성분이 상수 ⇒ 공간이 평탄하다"라는 주장이 올바른지 본 장의 내용에 기초하여 논하세요.
힌트
원통면은 종이를 말아서 만들 수 있다는 것을 떠올려 보세요. 종이를 말아도 종이 자체는 늘어나거나 줄어들지 않으므로, 내재적 기하는 평탄해요.
→ 풀이 보기
M-6. 구면 위의 "원"의 기하학¶
반지름 \(a\)인 구면 위에서, 북극(\(\theta = 0\))을 중심으로 하는 "원"(\(\theta = \theta_0\) = 일정한 선)을 생각해요.
(a) 이 원의 둘레 \(C\)를, 구면의 계량 \(ds^2 = a^2\,d\theta^2 + a^2\sin^2\theta\,d\varphi^2\)를 이용하여 구하세요.
(b) 북극에서 이 원까지의 구면 위의 거리(\(\varphi\) 일정인 경선을 따른 거리) \(r\)을 구하세요.
(c) \(C/(2\pi r)\)을 계산하고, \(\theta_0\)가 커지면 1보다 작아지는 것을 확인하세요. 이것은 구면이 양의 곡률을 가진다는 것의 표현이에요.
→ 풀이 보기
M-7. 계량 텐서의 변환 법칙에 의한 \(g'_{33}\) 의 도출¶
계량 텐서의 변환 법칙
을 이용하여, 3차원 구좌표의 계량 \(g'_{33} = r^2\sin^2\theta\) 를 직교좌표의 계량 \(g_{ij} = \delta_{ij}\) 로부터 도출하세요. (힌트: \(\dfrac{\partial x}{\partial \varphi} = -r\sin\theta\sin\varphi\), \(\dfrac{\partial y}{\partial \varphi} = r\sin\theta\cos\varphi\), \(\dfrac{\partial z}{\partial \varphi} = 0\) 을 사용하세요.)
→ 풀이 보기
Advanced(발전)¶
A-1. 일반 곡선좌표의 계량 텐서¶
2차원 평면 위에 다음과 같은 "일반 곡선좌표" \((u^1, u^2)\)를 생각해요:
여기서 \(f\), \(g\)는 충분히 매끄러운 함수이고 야코비 행렬은 정칙이라고 해요.
(a) 이 좌표에서의 계량 텐서 \(g_{ij}\)를 \(f\), \(g\)의 편미분으로 나타내세요.
(b) 좌표 기저벡터 \(\boldsymbol{e}_1\), \(\boldsymbol{e}_2\)가 직교하는(\(g_{12} = 0\)) 조건을 \(f\), \(g\)의 편미분을 이용하여 써 보세요.
(c) 극좌표와 포물선좌표(문제 M-3. 포물선 좌표의 계량 텐서 참조) 각각에 대해, (b)의 직교 조건이 만족되는지 확인하세요.
힌트
\(g_{ij} = \dfrac{\partial x}{\partial u^i}\dfrac{\partial x}{\partial u^j} + \dfrac{\partial y}{\partial u^i}\dfrac{\partial y}{\partial u^j}\)를 출발점으로 삼고, (b)에서는 \(g_{12} = 0\)을 조건식으로 써요. (c)는 구체적으로 편미분을 대입해요.
→ 풀이 보기
A-2. Rindler 좌표¶
{kind=link}
Minkowski(민코프스키) 시공간의 선소
에 대해, Rindler(린들러) 좌표 \((\eta, \xi)\)를
로 도입해요(\(y\), \(z\) 방향은 변환하지 않아요).
(a) Jacobi 행렬의 성분 \(\dfrac{\partial(ct)}{\partial \eta}\), \(\dfrac{\partial(ct)}{\partial \xi}\), \(\dfrac{\partial x}{\partial \eta}\), \(\dfrac{\partial x}{\partial \xi}\)를 구하세요.
(b) 계량 텐서의 변환 법칙을 이용하여, Rindler 좌표에서의 선소가
가 됨을 보이세요.
(c) 이 계량 텐서의 \(g_{\eta\eta} = -\xi^2\) 성분이 \(\xi\)에 의존하고 있어요. 이것은 제 5 장의 등가 원리(equivalence principle) 논의——"균일한 중력장 안에서는 위치에 따라 시간의 흐름이 다르다"——와 어떻게 관련되는지, 물리적 의미를 논하세요.
힌트
\(\cosh^2\eta - \sinh^2\eta = 1\)을 활용하세요. (c)에서는 Rindler 좌표가 등가속도 운동하는 관측자의 좌표계임을 떠올리고, \(g_{00}\) 성분과 고유시간의 관계를 생각하세요.
→ 풀이 보기
Feedback on this page
Let us know if something was unclear, incorrect, or could be improved.