第 1 章 Newton 重力の成功と限界¶
前回までのあらすじ:
プロローグでは、物理学のモデルはすべて仮説であり、一般相対論が GPS、ブラックホール、重力波、宇宙論といった広範な現象を扱うモデルであることを見渡した。これからこの長い旅を、一歩ずつ数式で追いかけていく。
この章のゴール
- Newton の重力モデルを「場の理論」として定式化し(万有引力 → 重力ポテンシャル → Poisson 方程式)、その驚異的な成功例(海王星の発見)を確認したうえで、2 つの限界——水星の近日点移動と重力の瞬時伝播——を明確にする
- さらに \(GM/(Rc^2)\) という無次元量を使って「いつ Newton モデルでは不十分になるか」の判定基準を理解する
- 最後に、Newton 力学のもう一つの定式化——最小作用の原理——を導入し、Euler-Lagrange 方程式から \(F = ma\) を再導出する
- この枠組みは一般相対論の全体を通じて使う「共通言語」となる
1.1 万有引力の法則——出発点の確認¶
🟡 リナ: プロローグで、Newton の万有引力の式と、重力の 4 つの性質(普遍性、遮蔽不可、長距離力、極端に弱い)を見たわね。今日はあの式を出発点にして、「場の理論」の言葉で書き直していくわ。まず式だけ確認しておきましょう。
\(G \approx 6.67 \times 10^{-11}\ \mathrm{N \cdot m^2 / kg^2}\) は万有引力定数。プロローグで見たように、陽子 2 個の間で重力と電磁気力の比を取ると \(\sim 10^{-36}\) という途方もなく小さい値になる。それでも重力が宇宙を支配するのは、遮蔽できず、常に引力で、どこまでも届くからだった。
🔵 カイ: 前の章で聞いた話ですね。今日はここから先に進むんですか?
🟡 リナ: そう。この式を「場の理論」に書き直すと、Newton のモデルの限界が数式レベルではっきり見えてくるの。
✅ 理解度チェック: 万有引力定数 \(G\) の SI 単位での値のオーダーは?
答え
\(G \approx 6.67 \times 10^{-11}\ \mathrm{N \cdot m^2/kg^2}\)(\(10^{-11}\) のオーダー)。
📝 練習問題:
- 地表の重力加速度の計算 → 問題 B-1. 地表での重力加速度の計算
1.2 重力場と重力ポテンシャル——Newton 重力を「場の理論」に書き直す¶
🟡 リナ: Newton の万有引力は「2 つの物体が直接引き合う」という遠隔作用の形で書かれていたわね。これを「場」を介した近接作用の形に書き直していくわ。3 つのステップで進めるわね。
ステップ 1:遠隔作用から近接作用へ——重力場の導入¶
🟡 リナ: 式 (1.1) は「2 つの物体が距離を隔てて直接力を及ぼし合う」という書き方——遠隔作用 (action at a distance)。でも、力が瞬時に伝わる問題を解決するには、力が空間を伝わっていく仕組みが必要よね。そこで場 (field) の考え方を導入する。
🔵 カイ: 「場」って何ですか?
🟡 リナ: 空間の各点に何らかの物理量が割り当てられている状態のこと。天気予報の気温分布図を思い浮かべて。日本地図の各地点に温度という数値が割り当てられているでしょう? あれは「温度場」。同じように、空間の各点に重力の強さを表すベクトルが割り当てられていれば、それが「重力場」よ。
🟡 リナ: ここから数式にベクトルが登場するけれど、一つ記法の約束をしておくわね。高校では矢印 \(\vec{r}\) でベクトルを表したと思うけれど、大学以降の物理では太字 \(\mathbf{r}\) で表すのが標準よ。添字がたくさんつく式では矢印だと読みにくくなるから、印刷では太字を使う慣例なの。
🔵 カイ: \(\mathbf{r}\) と \(r\) は違うんですか?
🟡 リナ: \(\mathbf{r}\) は位置ベクトル(方向と大きさを持つ)、\(r = |\mathbf{r}|\) はその大きさ(スカラー、ただの数値)。太字かどうかで区別するから注意してね。
では、原点に質量 \(M\) があるとき、位置 \(\mathbf{r}\) にある質量 \(m\) が受ける力は
ここで \(\hat{\mathbf{r}}\)(「\(\mathbf{r}\) ハット」と読む)は原点から \(\mathbf{r}\) の方向を向く単位ベクトル (unit vector)——大きさが 1 のベクトル。ハット記号 \(\hat{}\) は「単位ベクトル」を表す慣例で、この先もずっと使うわ。マイナス符号がついているのは、力が \(\hat{\mathbf{r}}\) と逆向き(中心に向かう方向=引力)だから。高校では力の大きさ \(F = GMm/r^2\) だけを扱ったかもしれないけれど、大学の物理ではベクトルで定式化するのが基本よ。「単位ベクトル × スカラー量」という書き方はこの先ずっと出てくるから、慣れておいてね。括弧の中を \(\mathbf{g}\) と名付ければ
🔵 カイ: 式 (1.4) だと、\(\mathbf{g}\) の中に \(m\) が入っていない……つまり試験質量を置く前から場が存在しているってことですか?
🟡 リナ: その通り。式 (1.4) を見て。式 (1.2) で \(m\) をくくり出せたから、\(\mathbf{g}\) の定義に \(m\) が残らない——つまり \(\mathbf{g}\) は試験質量 \(m\) を置く前から空間の各点に存在している量なの。質量 \(M\) が空間に作る「場」そのもので、場は物体の有無に関係なく空間の性質として存在している。図 1.1「中心質量が作る重力場のベクトル場」 を見ると、矢印が全て中心に向かっていて、中心に近いほど矢印が長い(力が強い)のが分かるわ。
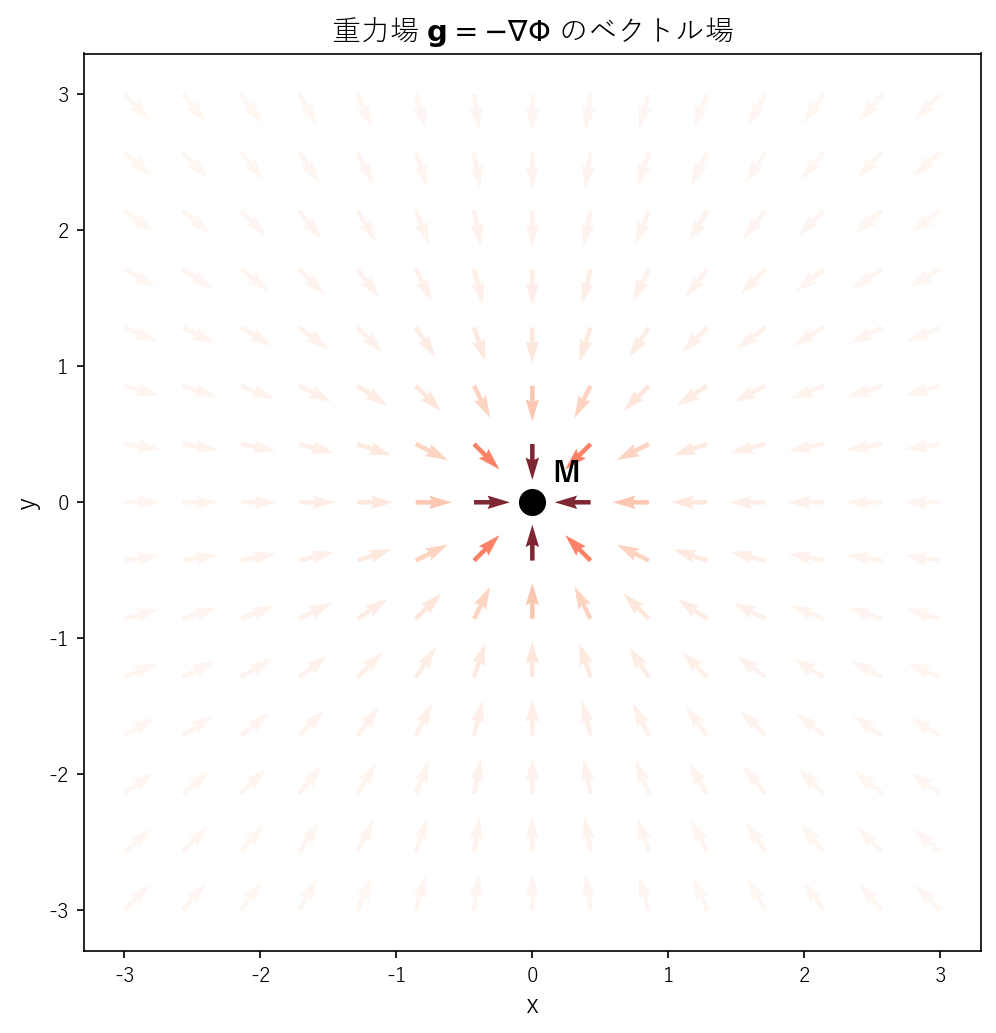
図 1.1: 中心質量が作る重力場のベクトル場。中心質量 \(M\) が作る重力場 \(\mathbf{g}\) のベクトル場。矢印は全て中心に向かっており、距離が近いほど力が強い(色が濃い)。
🟡 リナ: ここで起きている発想の転換を言葉にすると、「力の原因を空間に帰属させる」ということ。これが「場の考え方」——近接作用 (local action) の本質よ。力の伝わり方を 2 段階に分ける。第 1 段階:質量 \(M\) が周囲の空間に重力場 \(\mathbf{g}\) を作る。第 2 段階:重力場 \(\mathbf{g}\) がその場所にある質量 \(m\) に力を及ぼす。力は「空間を介して」伝わるの。
⚪ メイ: つまり、場は空間の性質であって物体の性質ではないから、「2 つの物体が直接引き合う」のではなく「空間が力を媒介する」という見方に変わったのね。
🔵 カイ: でも、場が「力を伝える」って言っても、伝わるのに時間はかかるんですか? それとも瞬時に届くんですか?
🟡 リナ: いい質問。実はそこが Newton モデルの根本的な問題点なの——後半で詳しく見るわ。まずは遠隔作用と近接作用の対比を整理しておきましょう。遠隔作用では、2 つの質量が何の媒介もなく直接力を及ぼし合う。近接作用では、質量 \(M\) がまず空間に重力場 \(\mathbf{g}\) を作り、その場が質量 \(m\) に力を伝える——2 段階のプロセスよ。図 1.2「遠隔作用と近接作用の対比」 を見て。
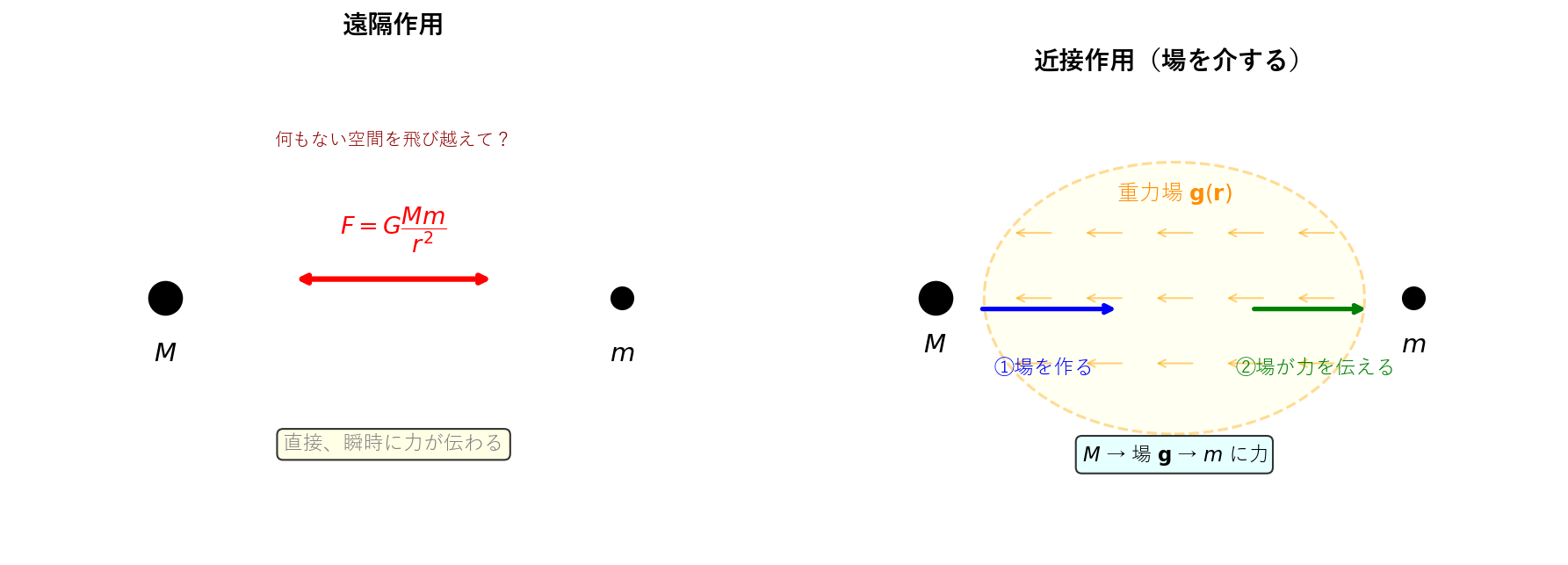
図 1.2: 遠隔作用と近接作用の対比。左:遠隔作用では 2 つの質量が何の媒介もなく直接力を及ぼし合う。右:近接作用では質量 \(M\) がまず空間に重力場 \(\mathbf{g}\) を作り(①)、その場が質量 \(m\) に力を伝える(②)。
✅ 理解度チェック: 重力場 \(\mathbf{g}(\mathbf{r})\) の定義式を書いてください。この量が質量 \(m\) に依存しないことは何を意味するでしょうか?
答え
\(\mathbf{g}(\mathbf{r}) = -GM\hat{\mathbf{r}}/r^2\)。この量は試験質量 \(m\) に依存せず、質量 \(M\) が空間に作る「場」そのもの。質量 \(m\) を置く前から空間の各点に \(\mathbf{g}\) が存在している。
ステップ 2:ベクトルからスカラーへ——重力ポテンシャルの導入¶
🔵 カイ: でも、ベクトル場って各点で 3 方向の成分を持つんですよね? 空間全体で管理するのは大変そう……。
🟡 リナ: いい着眼点。そこで重力ポテンシャル (gravitational potential) \(\Phi(\mathbf{r})\) というスカラー場を導入する。空間の各点 \(\mathbf{r}\) にただ 1 つの数値 \(\Phi(\mathbf{r})\) が割り当てられるだけだから、ベクトル場より扱いやすい。やりたいことは、「マイナスの勾配(傾き)をとると重力場 \(\mathbf{g}\) が出てくるようなスカラー関数 \(\Phi\) を見つける」こと——つまり \(\mathbf{g} = -\nabla\Phi\) となる \(\Phi\) を探す。
🔵 カイ: \(\nabla\) って何ですか?
🟡 リナ: \(\nabla\)(ナブラ)は「勾配をとる」操作を表す記号で、正式な定義はこの節の後半で説明するから、今は「\(\Phi\) の傾きを計算する操作」とだけ思っておいて。\(\nabla\Phi\) という記号が出てきても怖がらないでね——球対称の場合は高校の微分 \(d\Phi/dr\) だけで全て計算できるから、\(\nabla\) の正式な定義を知らなくても今からの計算は全部追えるわ。マイナスをつける慣例は、「物体がポテンシャルの低い方に引っ張られる」ことを自然に表すためよ(坂道でボールが低い方へ転がるイメージ)。既に分かっている \(\mathbf{g}\) から逆算して \(\Phi\) を求めるの。原点に質量 \(M\) があるとき、球対称性——つまり「どの方向から見ても同じ」という性質——から \(\Phi\) は \(r\) だけの関数になる。質量 \(M\) が原点にぽつんと 1 つあるだけだから、北を向いても東を向いても状況は同じ——\(x, y, z\) 方向の区別がない。区別がないなら \(\Phi\) の値も方向によって変わりようがなく、中心からの距離 \(r\) だけで値が決まるはず。今は \(\nabla\) の正式な定義を待たずに、直感だけで \(\Phi\) を求めてみるわ。\(\Phi\) が \(r\) だけの関数なら、\(\Phi\) が変化するのは \(r\) 方向だけ。だから「\(\Phi\) の空間的な傾き」は \(r\) 方向(\(\hat{\mathbf{r}}\) 方向)だけを向き、その大きさは高校で習った普通の微分 \(d\Phi/dr\) で計算できる。つまり今の特殊な場合、「\(\Phi\) の傾き」=「\(r\) 方向に \((d\Phi/dr)\) の大きさを持つベクトル」と考えればよい。\(\nabla\) の一般的な定義はこの後で与えるけれど、今は 1 変数の微分だけで済むの。式 (1.3) から、重力場の動径成分——\(\hat{\mathbf{r}}\) 方向の成分——は \(g_r = -GM/r^2\)(負なのは中心向きだから)。一方、\(\mathbf{g} = -\nabla\Phi\) を動径方向だけで書くと \(g_r = -d\Phi/dr\)。この 2 つを等しいと置けば \(-d\Phi/dr = -GM/r^2\)、つまり \(d\Phi/dr = GM/r^2\)。これを \(r\) で積分すればいい。
⚪ メイ: つまり、未知の \(\Phi\) を求める問題が、高校で習った積分の計算に帰着されたのね。
🟡 リナ: そう。高校の数学 III で \(\int x^n\,dx = x^{n+1}/(n+1)\)(\(n \neq -1\))と習ったわね。変数が \(r\) でも同じ公式が使える。今 \(1/r^2 = r^{-2}\) だから \(n = -2\) を代入すると \(\int r^{-2}\,dr = \frac{r^{-2+1}}{-2+1} = \frac{r^{-1}}{-1} = -\frac{1}{r}\)。これを使うと
ここで \(GM\) は \(r\) に依存しない定数だから積分の外に出せる(高校で \(\int af(x)\,dx = a\int f(x)\,dx\) と習ったのと同じ)。\(C\) は積分定数——不定積分には「定数分の不定性」があるから、物理的な条件で決める必要がある。無限遠で \(\Phi \to 0\) という境界条件——「無限に遠い場所を基準(ゼロ)にする」という約束——を課すと、\(r \to \infty\) で \(-GM/r \to 0\) だから \(C = 0\) が決まり、
が得られる。
🔵 カイ: おお、\(-1/r\) の形になるんですね。無限遠でゼロ、中心に近づくほどマイナスに深くなる。
🟡 リナ: 図 1.3「重力ポテンシャルの3D表面」 を見ると、中心に近づくほどポテンシャルが深くなる「井戸」の形をしているのが分かるわ。
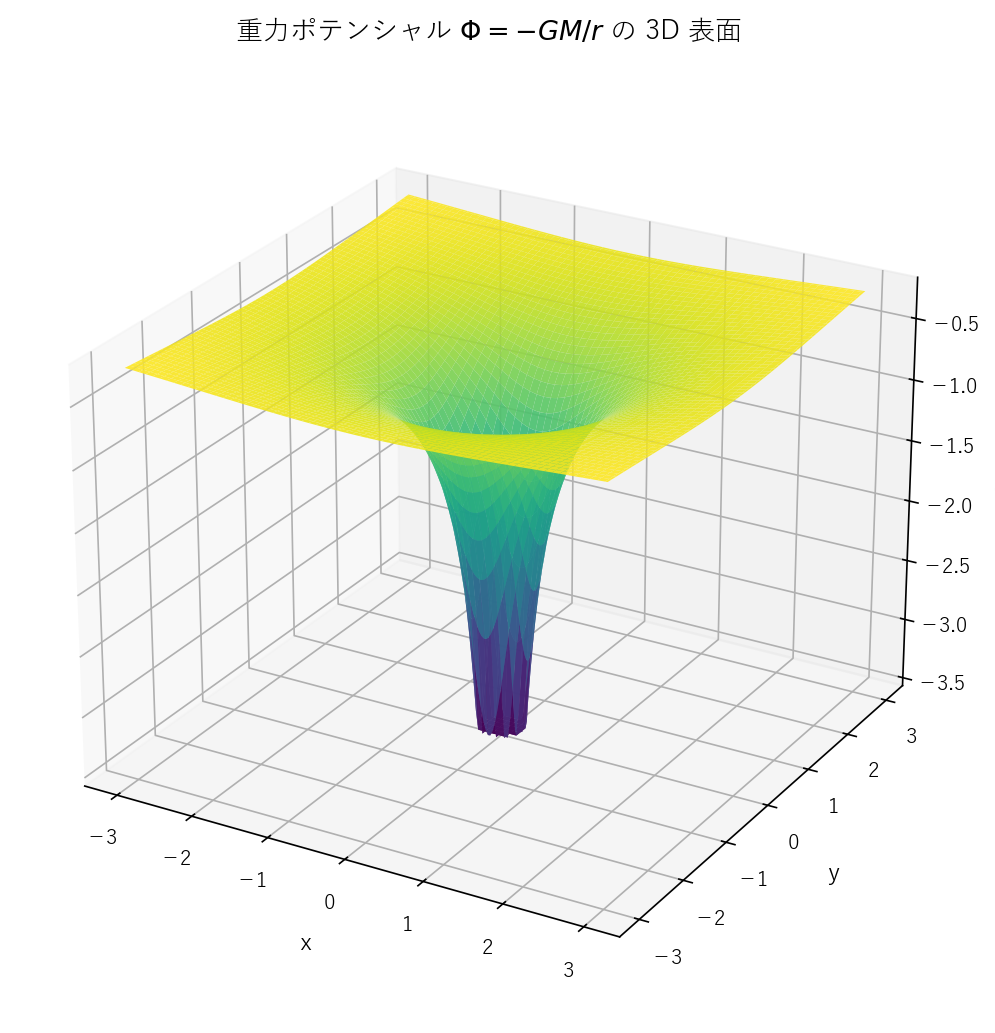
図 1.3: 重力ポテンシャルの3D表面。重力ポテンシャル \(\Phi = -GM/r\) の 3D 表面。中心の質量に近づくほどポテンシャルが深くなる「井戸」の形をしている。
🟡 リナ: では次に、\(\Phi\) から \(\mathbf{g}\) を取り出す操作を正式に定義しておきましょう。さっきは \(\mathbf{g}\) から逆算して \(\Phi\) を求めたけれど、本来の流れは「\(\Phi\) が与えられたら、その傾きを計算して \(\mathbf{g}\) を得る」という方向よ。数学的には勾配 (gradient (グラディエント)) という操作で、記号 \(\nabla\)(ナブラ)を使って書くわ。直交座標 \((x, y, z)\) では
つまり、\(x\) 方向の傾き、\(y\) 方向の傾き、\(z\) 方向の傾きを 3 つ並べて 1 つのベクトルにしたもの。ここで \(\partial\)(「パーシャル」と読む。日本の物理では「ラウンド」とも呼ばれる)は偏微分の記号。\(\partial\Phi/\partial x\) は「\(y\) と \(z\) を固定したまま \(x\) だけ少し変えたら \(\Phi\) がどれだけ変わるか」を表す。たとえば \(\Phi = x^2 + 3y\) なら、\(\partial\Phi/\partial x = 2x\)(\(y\) は定数扱い)、\(\partial\Phi/\partial y = 3\)(\(x\) は定数扱い)、\(\partial\Phi/\partial z = 0\)(\(\Phi\) に \(z\) が含まれていないから)。高校の微分と同じ計算で、「他の変数を定数だと思って微分する」だけよ。つまり \(\nabla\Phi\) は、\(\Phi\) が最も急に増加する方向と、その傾きの大きさを教えてくれるベクトルよ。
⚪ メイ: つまり、\(\nabla\Phi\) は「\(\Phi\) が最も急に増加する方向と傾きの大きさ」を一つのベクトルにまとめたもの——山の等高線地図で言えば「最も急な坂の方向を示す矢印」みたいなものね。
🟡 リナ: そう。重力場はポテンシャルの勾配にマイナスをつけたもの:
さっき言ったように、マイナスがつくのは物体がポテンシャルの低い方向に引っ張られるから——勾配 \(\nabla\Phi\) は「登り方向」を向くけれど、重力は「下り方向」に引っ張るのでマイナスが必要なの。
🔵 カイ: \(\Phi\) が「重力的な高さ」で、その傾きが力を生む、ということですね。
🟡 リナ: 図 1.4「重力ポテンシャルの等高線と勾配」 を見ると、等高線(同じ \(\Phi\) の値を結ぶ線)に対して矢印が垂直に、ポテンシャルが下がる方向を向いているのが分かるわ。
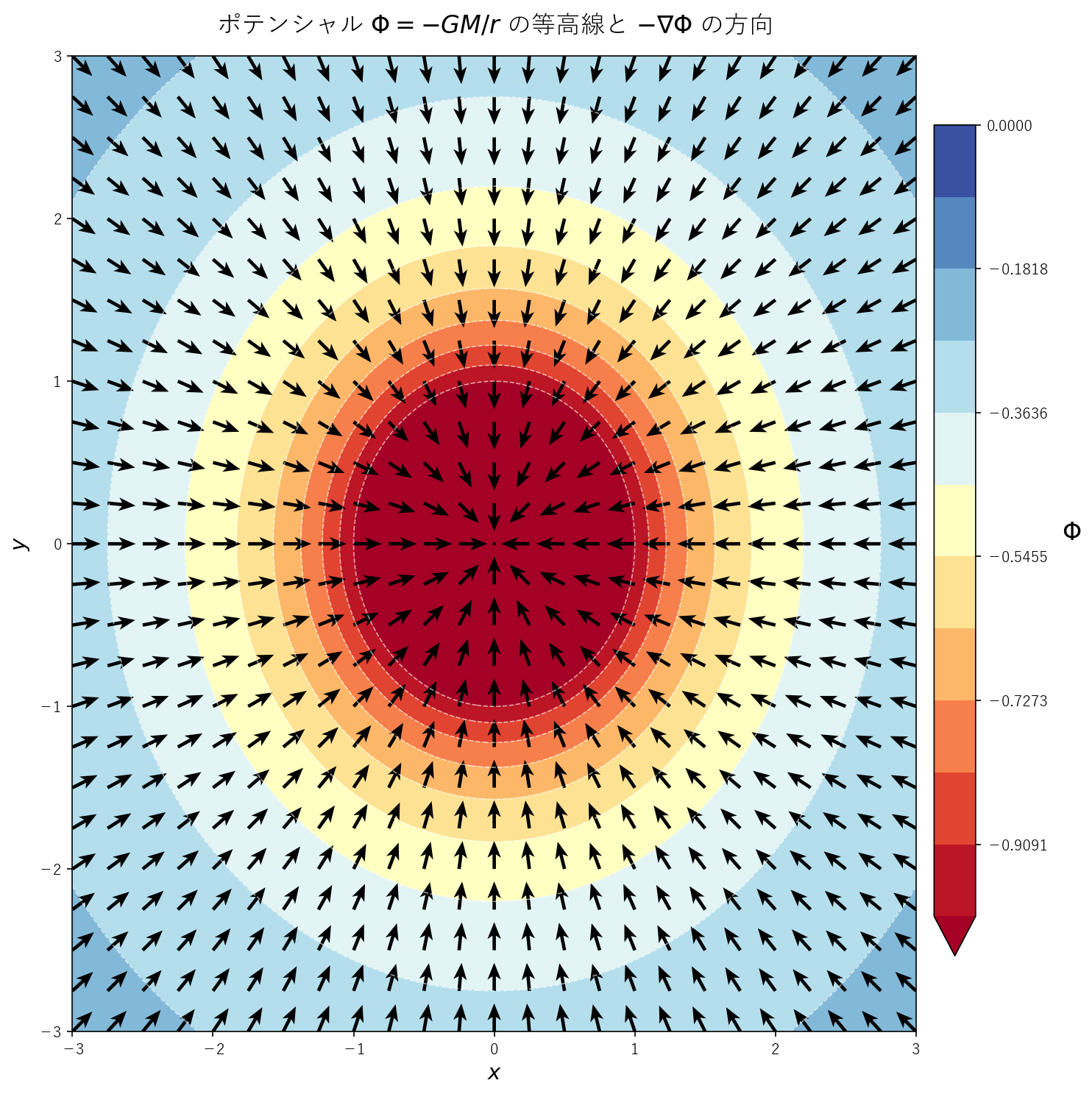
図 1.4: 重力ポテンシャルの等高線と勾配。同じポテンシャル \(\Phi = -GM/r\) を上から見た等高線図(色)と重力場 \(\mathbf{g} = -\nabla\Phi\) の方向(矢印)。矢印はポテンシャルが下がる方向、つまり質量に引き寄せられる方向を向いている。
✅ 理解度チェック: 「遠隔作用」と「近接作用」の違いを、重力場の考え方を使って説明してみましょう。
答え
遠隔作用:2 つの物体が距離を隔てて直接力を及ぼし合う。近接作用:質量 \(M\) がまず周囲の空間に重力場 \(\mathbf{g}\) を作り、その場が質量 \(m\) に力を及ぼす。力は「空間を介して」伝わる。
✅ 理解度チェック: 重力ポテンシャル \(\Phi = -GM/r\) で、\(r \to \infty\) のとき \(\Phi \to 0\) となる。これは何を意味するでしょうか?
答え
無限遠を基準点(ポテンシャルゼロ)に選んでいる。質量 \(M\) に近づくほどポテンシャルは負に深くなり、重力に束縛されていることを表す。
📝 練習問題:
- 重力ポテンシャルの勾配 → 問題 B-2. 重力ポテンシャルの \(x\) 成分の微分, 問題 B-3. 重力場のベクトル表示、重ね合わせの原理 → 問題 B-4. 2 つの点質量による重ね合わせ、偏微分の計算練習 → 問題 B-8. 偏微分の基礎計算, 問題 B-9. 勾配ベクトルと等温線、2 次元ポテンシャルの勾配 → 問題 B-3. 2 次元ポテンシャルの勾配
ステップ 3:質点から分布へ——Poisson 方程式¶
🟡 リナ: ここまでで、「ポテンシャル \(\Phi\) さえ分かれば、\(\mathbf{g} = -\nabla\Phi\) で重力場が決まる」ことが分かった。次の問いは、\(\Phi\) はどうやって決まるのか? ということ。式 (1.5) は「原点に質量 \(M\) の質点がある」という特殊な場合の結果だった。でも現実の星は大きさがあるし、質量は空間に広がっている。そこで「質量密度」\(\rho(\mathbf{r})\)(ロー)——単位体積あたりの質量——を導入するわ。
🔵 カイ: 質量が空間のあちこちに散らばっている場合でも、ポテンシャルを求められるんですか?
🟡 リナ: そう。ここで一つ問いを立てるわ。「ある領域に質量がどれだけ含まれているか」を、ポテンシャルや重力場の情報だけから知る方法はないかしら?
🔵 カイ: 重力場が強ければ中に質量がたくさんある、とは言えそうですけど……定量的にはどうすれば?
🟡 リナ: いい感覚ね。実は、万有引力の逆二乗法則から、こんな性質が導ける。まず直感的な説明をしてから数式にするわね。ここから Poisson 方程式にたどり着くまで少し長い道のりになるから、先にロードマップを示しておくわ。(1) まず「流束」と「Gauss の法則」を理解する → (2) 次に「発散」と「発散定理」で面の性質を各点の性質に翻訳する → (3) 最後に Poisson 方程式を得る。では (1) から。質量 \(M\) を囲む任意の閉曲面——たとえば風船のように質量をすっぽり包む面——を考える。その面の各点で、重力場が面を「貫いている」強さを測って、面全体で足し合わせる。これを流束 (flux)と呼ぶの。水の流れに例えると、ホースから出る水を網で受けたとき、網を通過する水の総量が流束に対応する。重力場の場合は「面を貫く重力場の強さの合計」ね。
🔵 カイ: 面の形を変えたら、流束も変わりそうですけど……
🟡 リナ: ところが、逆二乗法則のおかげで変わらないの。こう考えて。水の流れの例に戻ると、ホースから一様に水が出ているとき、「網を通過する水の量」は「水の流速 × 網の面積」で計算できるわよね——流速が速いほど、網が広いほど、通過する水は多い。重力場の流束も同じ発想で、「場の強さ × 面積」で計算する。球面で囲んだ場合、球面上のどの点でも重力場の大きさは \(GM/r^2\) で一様、球面の面積は \(4\pi r^2\)。しかも球面上では重力場が面に垂直だから、「場の強さ × 面積」がそのまま流束になって、\(r^2\) が打ち消し合い \(4\pi GM\) になる——面の半径に依存しない(符号は後で考える)。
⚪ メイ: 場の強さが \(1/r^2\) で弱くなるのに、面積が \(r^2\) で大きくなるから、ちょうど打ち消し合って半径によらなくなる——逆二乗法則ならではの性質ね。
🟡 リナ: その通り。面の形を球から歪めても、合計は変わらない。なぜか? まず立体角という概念を説明するわね。2 次元では「角度」は 2 本の線が開く広さを表すけれど、3 次元では「方向の広がり」を表す量が必要になる。それが立体角。たとえば腕を伸ばして親指を立てたとき、親指の爪が視野に占める「方向の広がり」が立体角のイメージ——遠くにある大きな看板と、近くにある小さな名刺が同じ大きさに見えるなら、両者の立体角は同じよ。中心から見て、面のある部分がどれだけの方向を覆っているかを表す量なの。単位はステラジアン (sr) と呼ばれ、全方向(球全体)で \(4\pi\) sr になる——半径 \(r\) の球の表面積は \(4\pi r^2\) だから、全方向の立体角は \(4\pi r^2 / r^2 = 4\pi\) sr ね。
さて、閉曲面を歪めたとき何が起こるか。面のある部分が中心に近づくと、そこでは場が強くなる(\(1/r^2\) で強まる)。でも同時に、中心から見たときにその部分が覆う方向の広がり(立体角)は狭くなる。立体角の大きさは「面積 ÷ \(r^2\)」で決まるの。2 次元の角度が「弧の長さ ÷ 半径」(ラジアンの定義)だったのと同じ発想よ——3 次元では「面積 ÷ 半径の 2 乗」になる。中心から距離 \(r\) の位置にあり、中心に正対している(面の法線が中心を向いている)面積 \(A\) の小片が覆う立体角は \(\Delta\Omega = A/r^2\)。同じ面積でも遠くにあれば覆う方向は狭く、近くにあれば広い。面が傾いている場合——法線が中心方向からずれている場合——は、「中心から見た見かけの面積」が小さくなる(正面から見た看板と斜めから見た看板の違いを想像して)。立体角 \(\Delta\Omega\) は「見かけの面積(面に正対した成分)÷ \(r^2\)」で定義されるから、面が傾いていると同じ実面積でも立体角への寄与は減る。面が中心に近づいて \(r\) が小さくなると、同じ立体角を覆うのに必要な面積は \(r^2\) に比例して小さくなる。逆に遠ざかった部分では場が弱くなるけれど、覆う方向が広くなる。流束は「場の強さの面に垂直な成分 × 面積」だったわよね。面のある小片について考えると、場の強さは \(GM/r^2\)、面に垂直な成分を取り出すと面の傾きの効果が入り、面積と合わせると \(GM \times (\text{見かけの面積})/r^2 = GM\,\Delta\Omega\) となって \(r\) が消える——つまり各小片の流束への寄与は、その小片が覆う立体角 \(\Delta\Omega\) だけで決まり、距離 \(r\) に依存しない。閉曲面全体では全方向 \(4\pi\) を覆うから、合計は \(4\pi GM\) になる(符号を含めると \(-4\pi GM\))。面の形に依存しないの。図 1.5「Gaussの法則:閉曲面を通る流束」 を見て。
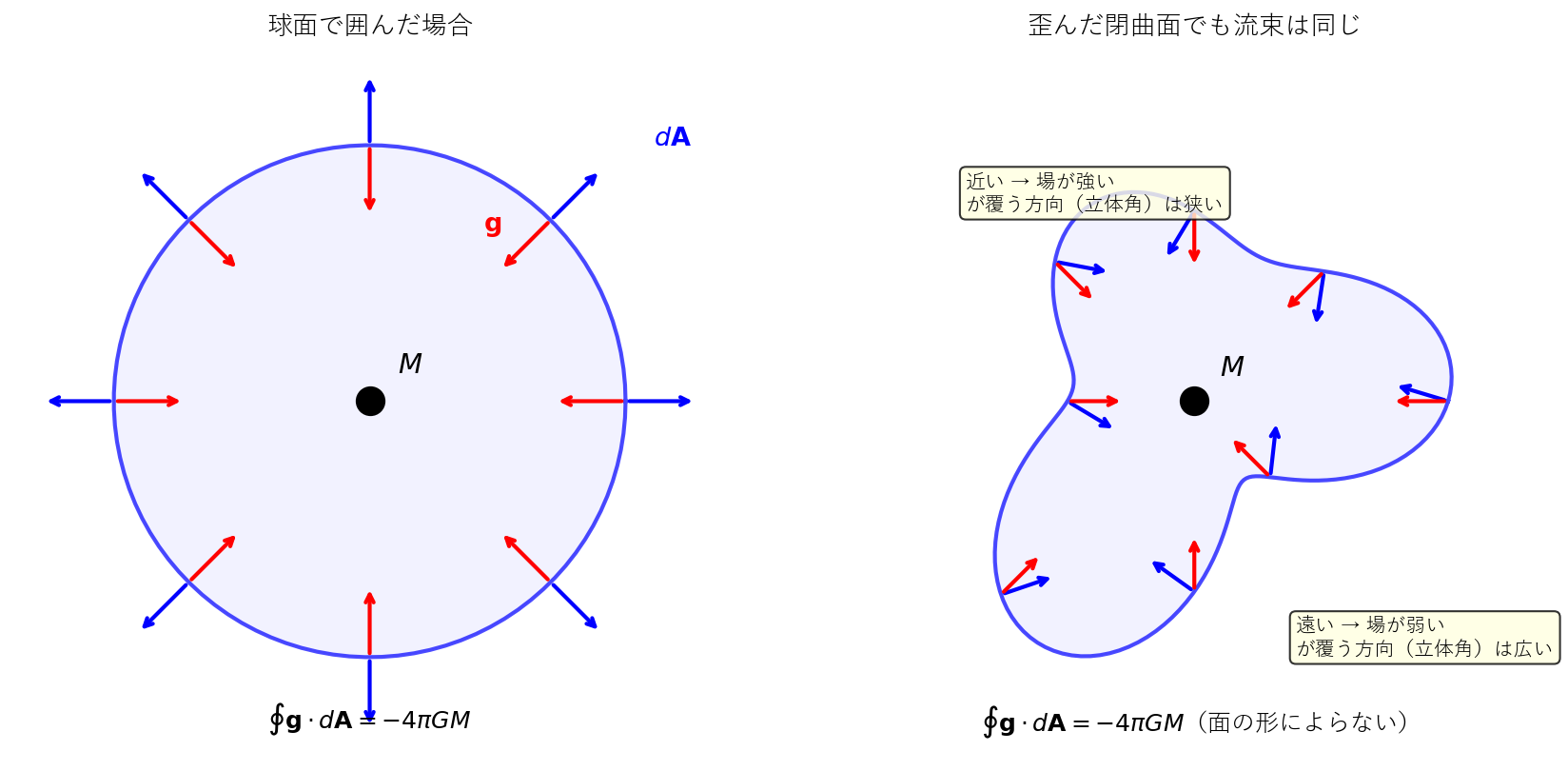
図 1.5: Gaussの法則:閉曲面を通る流束。左:球面で囲んだ場合。赤矢印が重力場 \(\mathbf{g}\)(内向き)、青矢印が面積素 \(d\mathbf{A}\)(外向き)。右:歪んだ閉曲面でも、近い部分では場が強いが覆う方向(立体角)が狭く、遠い部分では場が弱いが覆う方向が広いため、流束の合計は同じ \(-4\pi GM\) になる。
🟡 リナ: これを数式で書くわね。やることは 3 つ——(a) 面の各点で「重力場が面を貫く強さ」を測る道具を定義する、(b) それを面全体で足し合わせる記号を導入する、(c) 球面で実際に計算する。まず (a) から。半径 \(r\) の球面で考えましょう。球面を細かいタイルに分割するイメージ。各タイルには面積と外向きの法線方向がある。タイルを無限に細かくした極限で、各タイルの面積と法線方向を合わせたベクトルを面積素ベクトル \(d\mathbf{A}\) と書く——大きさが微小面積、方向が面の外向き法線。高校の積分で \(\Delta x\) を無限に細かくして \(dx\) にしたのと同じ発想よ。球面の場合、法線は全て放射方向(\(\hat{\mathbf{r}}\) 方向)を向いているわ。
🔵 カイ: 面積素ベクトルって、各タイルの「面積」と「どっちを向いているか」を一つのベクトルにまとめたものですか?
🟡 リナ: そう。大きさがタイルの面積、方向がタイルの外向き法線。次に、各タイルで「重力場のうち面に垂直な成分」を計算する。これはベクトルの内積(ドット積) \(\mathbf{g} \cdot d\mathbf{A}\) で表せる——2 つのベクトルの「同じ方向の成分」を掛け合わせる操作よ。高校で \(\vec{a} \cdot \vec{b} = |\vec{a}||\vec{b}|\cos\theta\) と習ったかもしれないけれど、同じもの。球面上では \(\mathbf{g}\) と \(d\mathbf{A}\) が逆向き(重力場は内向き、面積素は外向き)だから、\(\cos\theta = \cos 180° = -1\) となり、内積は \(-|\mathbf{g}|\,|d\mathbf{A}|\) になる。
🔵 カイ: 重力場が面に「入ってくる」方向なのに、面積素は「出ていく」方向だから、掛けると負になるんですね。
🟡 リナ: その通り。内積が負ということは「場が面に入ってくる方向」を意味している——外向きを正にとっている以上、吸い込みは負で表されるの。つまり \(\mathbf{g} \cdot d\mathbf{A}\) は「重力場の面に垂直な成分 × 微小面積」を意味し、今の場合は負の値になる。
⚪ メイ: なるほど、符号の正負で「湧き出し」か「吸い込み」かが区別されるのね。
🟡 リナ: そう。最後に、記号 \(\oint\) は「閉じた面の全てのタイルについて足し合わせる」という積分——高校の \(\int\) が「線に沿って足す」なら、\(\oint\) は「閉じた面の全タイルについて足す」と思えばよい。球面で具体的に計算してみましょう。球面上の全タイルの面積を足すと球の表面積 \(4\pi r^2\)。各タイルでの \(\mathbf{g} \cdot d\mathbf{A}\) は \(-|\mathbf{g}| \times (\text{タイルの面積})= -(GM/r^2) \times (\text{タイルの面積})\)。全タイルを足すと:
\(r^2\) が分母と分子で打ち消し合って、球面の半径に依存しない結果になったわ。
🔵 カイ: おお、本当に \(r\) が消えた! 球をどんな大きさにしても同じ値になるんですね。
🟡 リナ: これを Gauss (ガウス) の法則(重力版)と呼ぶの。右辺のマイナスは、重力場が内向き(中心に向かう)なのに面積素 \(d\mathbf{A}\) が外向きを正にとるから。面の形や大きさに関係なく、中にある質量だけで決まるという強力な結果よ。
🔵 カイ: 面の形に関係なく? 球でも立方体でも?
🟡 リナ: そう。次のステップは、Gauss の法則を「面全体の合計」から「各点での性質」に翻訳すること。そのための数学的な道具が発散定理 (divergence theorem) よ。
🟡 リナ: 主張を先に言うわね——「閉曲面を通る流束の合計 = 内部の各点での湧き出しを体積で足し合わせたもの」。直感的には、閉曲面の内部を細かい小さな箱に分割して考えるの。隣り合う箱の共有面では、一方の箱から「出ていく」流束と、もう一方の箱に「入ってくる」流束が打ち消し合う。打ち消されずに残るのは、一番外側の面——つまり元の閉曲面——を通る流束だけ。だから「全ての小箱の湧き出しの合計」=「外側の面を通る流束の合計」になるの。この「隣り合う箱で打ち消し合う」イメージは 図 1.6「発散の直感的イメージ」 の左図を小さな箱がたくさん並んでいる状態として想像してみて。厳密な証明は 問題 M-1. Gauss の法則から Poisson 方程式の導出 で確認してね。まず「各点での湧き出し」の意味を説明してから、数式にするわ。
🔵 カイ: 「各点での湧き出し」って何ですか?
🟡 リナ: こう考えて。ある点の周りにごく小さな箱を想像する。その箱の表面を通って出ていく流束が正なら、その点は「湧き出し」——蛇口のように場が生まれている場所。逆に流束が箱に入ってくるなら「吸い込み」。重力の場合、質量がある場所では重力場が四方から吸い込まれるから、湧き出しは負になる。図 1.6「発散の直感的イメージ」 を見て。
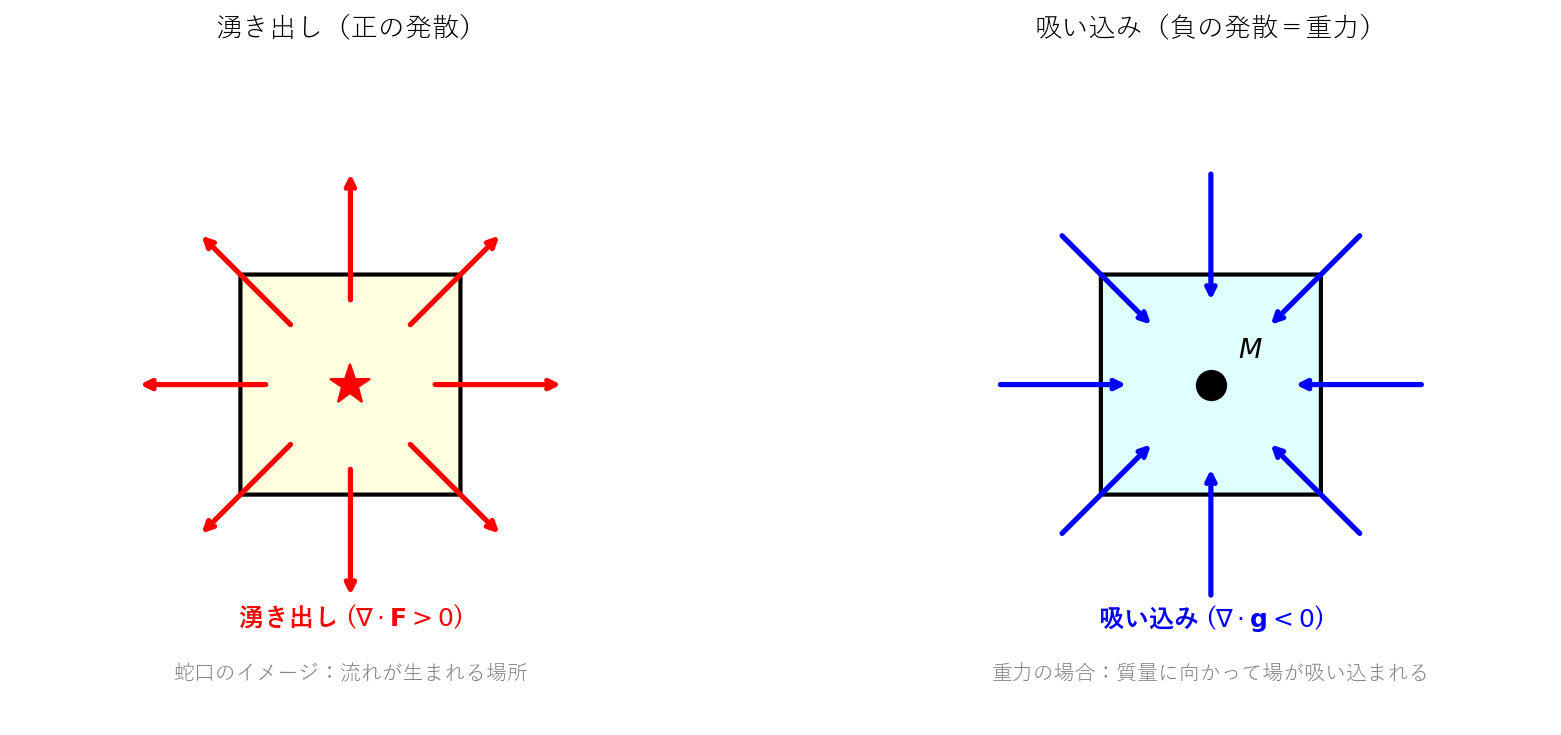
図 1.6: 発散の直感的イメージ。左:湧き出し(正の発散)——蛇口のように流れが箱から出ていく。右:吸い込み(負の発散)——重力の場合、質量 \(M\) に向かって場が吸い込まれる。
🟡 リナ: この「各点での湧き出しの強さ」を数式で表したのが \(\nabla \cdot \mathbf{g}\)(ナブラ・ドット・ジー)——重力場の発散と呼ばれるスカラー量よ。直交座標では
つまり、重力場の各成分が各方向にどれだけ変化しているかを足し合わせたもの。勾配 \(\nabla\Phi\) がスカラーからベクトルを作る操作だったのに対し、発散 \(\nabla \cdot \mathbf{g}\) はベクトルからスカラーを作る操作ね。発散定理は「閉曲面を通る流束の合計 = 内部の各点での湧き出しを体積で足し合わせたもの」と言っている。数式で書くと:
左辺の「面全体の流束」が、右辺の「内部の各点の湧き出しを全部足したもの」に等しい、ということ。
🔵 カイ: つまり、面を通る合計を「中身の各点の寄与の合計」に書き換えられるんですね。
🟡 リナ: そう。Gauss の法則の右辺 \(-4\pi GM\) で、\(M\) は閉曲面内の全質量だから \(M = \int \rho\, dV\)(密度を体積で積分したもの)と書ける。ここで \(\int \rho\, dV\) は「領域内の各点で密度 \(\rho\) に微小体積 \(dV\) を掛けて、全部足し合わせる」という操作——高校の \(\int f(x)\,dx\) が「線に沿って足す」なら、\(\int \rho\, dV\) は「体積全体で足す」と思えばよい。つまり右辺は \(-4\pi G \int \rho\, dV\)。左辺に発散定理を適用すると \(\int_V (\nabla \cdot \mathbf{g})\, dV = -4\pi G \int_V \rho\, dV\)。この等式がどんな領域 \(V\) を選んでも成り立つから——もし被積分関数がある点で等しくなかったとする。たとえば \(\nabla \cdot \mathbf{g} > -4\pi G\rho\) となる点があったら、その点を含むごく小さな領域 \(V\) を選べば、左辺が右辺より大きくなって等式が破れてしまう。だから被積分関数同士が全ての点で等しくなければならない(この論法は後の Euler-Lagrange 方程式の導出でも使う):
⚪ メイ: 「面全体の関係」から「各点での関係」に翻訳された——とても強い結論が出たのね。
🟡 リナ: マイナスがついているのは、重力場が質量に向かって「吸い込まれる」方向だから。ここに \(\mathbf{g} = -\nabla\Phi\) を代入すると \(\nabla \cdot (-\nabla\Phi) = -4\pi G\rho\)、つまり \(-\nabla^2\Phi = -4\pi G\rho\)。両辺に \(-1\) を掛けて符号を反転させると、Poisson (ポアソン) 方程式が得られる:
発散定理そのものの証明は 問題 M-1. Gauss の法則から Poisson 方程式の導出 で確認してね。
🔵 カイ: この式の \(4\pi\) って何ですか? なぜ円周率が出てくるんですか?
🟡 リナ: \(4\pi\) は Gauss の法則から来ているの。さっきの式 \(\oint \mathbf{g} \cdot d\mathbf{A} = -4\pi GM\) を見て。点質量 \(M\) を半径 \(r\) の球面で囲んだとき、球の表面積は \(4\pi r^2\)。重力場の大きさは \(GM/r^2\) で、方向は中心向き(内向き)。一方、面積素 \(d\mathbf{A}\) は外向きを正の向きにとるから、\(\mathbf{g}\) と \(d\mathbf{A}\) は逆向き——内積はマイナス。流束は \(-(GM/r^2) \times 4\pi r^2 = -4\pi GM\) となって、右辺の符号とぴったり合う。つまり \(4\pi\) は球の表面積に由来する幾何学的な因子なの。逆二乗法則と 3 次元空間の球対称性が組み合わさって自然に現れる数字よ。
🔵 カイ: \(\nabla^2\) って何ですか?
🟡 リナ: Laplacian (ラプラシアン) と呼ばれる演算子で、直交座標 \((x, y, z)\) では
\(\Phi\) を各方向に 2 回微分して足し合わせたもの。さっきの勾配 \(\nabla\Phi\) はベクトル(方向と大きさを持つ)だったけれど、\(\nabla^2\Phi\) はスカラー(ただの数値)よ。高校で \(f''(x) > 0\) なら「グラフが下に凸」と習ったわよね。下に凸ということは、その点の値 \(f(x)\) が左右の近傍の平均値より小さい——つまり「周囲より凹んでいる」。逆に \(f''(x) < 0\) なら上に凸で、その点は周囲より高い。\(\nabla^2\Phi\) はこの「周囲の平均値からどれだけずれているか」を 3 次元に拡張したものよ。正確には、\(\nabla^2\Phi(P)\) は「周囲の平均値 − 中心の値 \(\Phi(P)\)」に比例する量で、正なら中心が周囲より凹んでいる(低い)ことを意味する。図 1.7「Laplacianの直感的意味」 を見て。
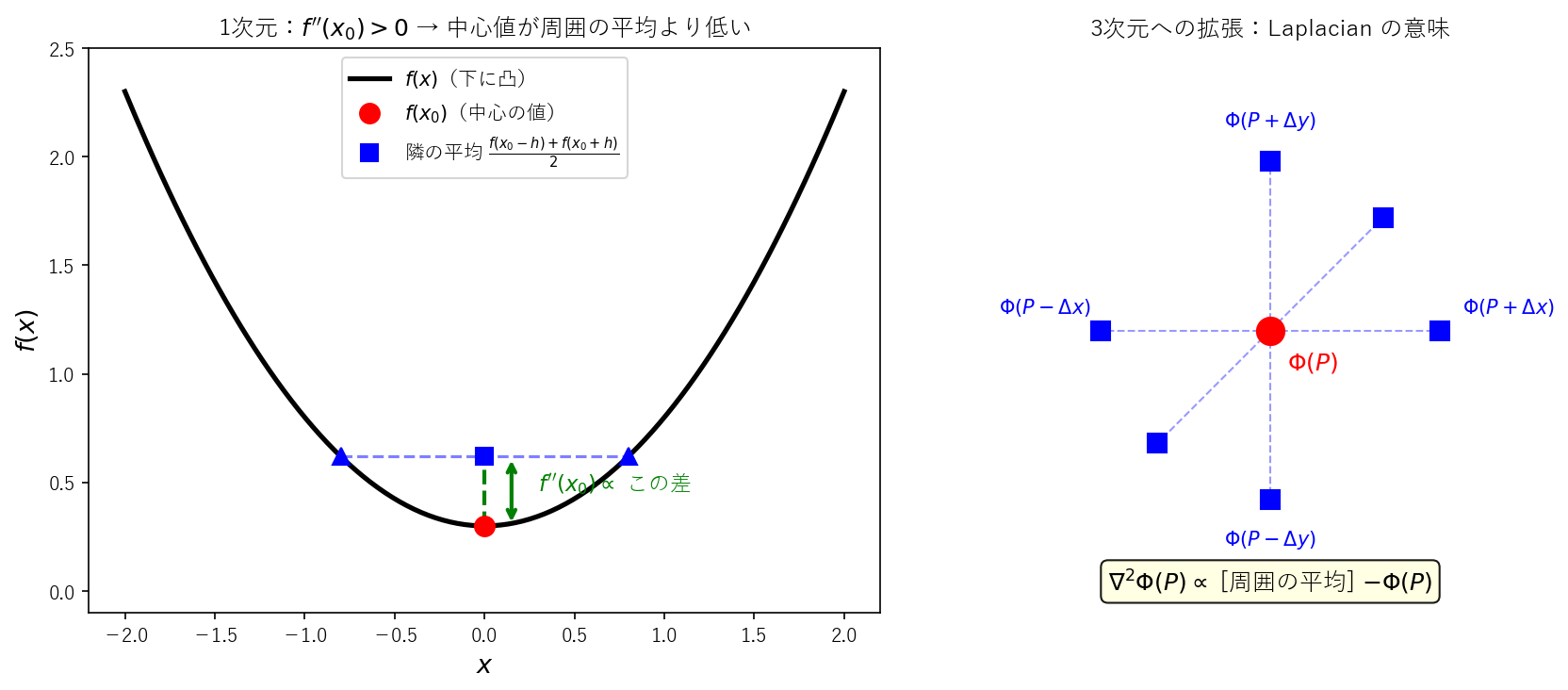
図 1.7: Laplacianの直感的意味。左:1次元の場合。\(f''(x_0) > 0\)(下に凸)なら中心の値 \(f(x_0)\) は両隣の平均より低い。右:3次元への拡張。Laplacian \(\nabla^2\Phi(P)\) は「周囲の点の平均値 − 中心の値 \(\Phi(P)\)」に比例する(正なら中心が凹んでいる)。
🟡 リナ: ここで、今まで出てきた 3 つの微分操作を表にまとめておくわね。
表 1.1: ベクトル解析の 3 つの微分操作
| 操作 | 記号 | 入力 → 出力 | 物理的意味 |
|---|---|---|---|
| 勾配 | \(\nabla\Phi\) | スカラー → ベクトル | 最も急な増加方向と傾き |
| 発散 | \(\nabla\cdot\mathbf{g}\) | ベクトル → スカラー | 各点での湧き出し/吸い込みの強さ |
| Laplacian | \(\nabla^2\Phi\) | スカラー → スカラー | 周囲の平均からのずれ |
⚪ メイ: 入力と出力の型が全部違うのね。勾配はスカラーからベクトルを作り、発散はベクトルからスカラーに戻す。ということは、この 2 つを続けて適用したら「スカラー → ベクトル → スカラー」で元の型に戻るはず……それが 3 行目の Laplacian?
🟡 リナ: そう。そしてここで気づいてほしいのだけど、表の 1 行目と 2 行目を続けて適用したら、スカラー → ベクトル → スカラーになるわよね。実は \(\nabla^2\Phi = \nabla \cdot (\nabla\Phi)\)——つまり Laplacian は「勾配をとってから発散をとる」という 2 段階の合成なの。スカラー → ベクトル → スカラーと 2 段階の合成だから、表の 1 行目と 2 行目を組み合わせたものが 3 行目ね。さっき \(\nabla \cdot \mathbf{g} = -4\pi G\rho\) に \(\mathbf{g} = -\nabla\Phi\) を代入して \(\nabla^2\Phi\) が出てきたのは、まさにこの構造よ。
🔵 カイ: なるほど、3 つの操作がバラバラに見えたけど、実は Laplacian は最初の 2 つの合体だったんですね。
🟡 リナ: つまり式 (1.7) は、「物質が存在するところ (\(\rho \neq 0\)) では \(\nabla^2\Phi > 0\)——さっきの直感で言えば、ポテンシャルの値が周囲の平均より低い(凹んでいる)。物質が多いほど深く凹む」ということ。質量がある場所でポテンシャルが深い井戸になる、という 図 1.3「重力ポテンシャルの3D表面」 のイメージと一致しているわね。
⚪ メイ: 左辺がポテンシャルの曲がり具合、右辺が物質の量。だから「物質が重力場の源になる」という関係が、この 1 本の式に凝縮されているのね。
🟡 リナ: その通り。式 (1.7) は微分方程式だから、質量の分布 \(\rho(\mathbf{r})\) を右辺に入れてこの方程式を解けば、ポテンシャル \(\Phi(\mathbf{r})\) が求まり、そこから \(\mathbf{g} = -\nabla\Phi\) で重力場も決まる。
ここで一つ、便利な道具を紹介するわ。「質量が 1 点に集中している」ことを密度 \(\rho(\mathbf{r})\) でどう表すか? 原点以外では \(\rho = 0\) で、原点では密度が無限大、でも全空間で積分すると質量 \(M\) になる——そんな「究極に尖った」関数を Dirac (ディラック) のデルタ関数 \(\delta^3(\mathbf{r})\) と呼ぶの。上付きの 3 は「3 次元版」という意味——\(x, y, z\) の 3 方向全てで尖っているということよ。
🔵 カイ: 原点以外ではゼロで、原点だけ無限大……そんな関数あるんですか?
🟡 リナ: 図 1.8「Diracデルタ関数のガウス極限」 を見て。普通の関数としては存在しないけれど、「積分すると 1 になる、無限に鋭いピーク」として数学的に定義できる。定義を 2 つの性質で書くと:
- \(\mathbf{r} \neq 0\) では \(\delta^3(\mathbf{r}) = 0\)
- 全空間で積分すると \(\int \delta^3(\mathbf{r})\, d^3r = 1\)
つまり「原点以外ではゼロだけど、全空間で足し合わせるとちょうど 1 になる」という、極限的な対象よ。
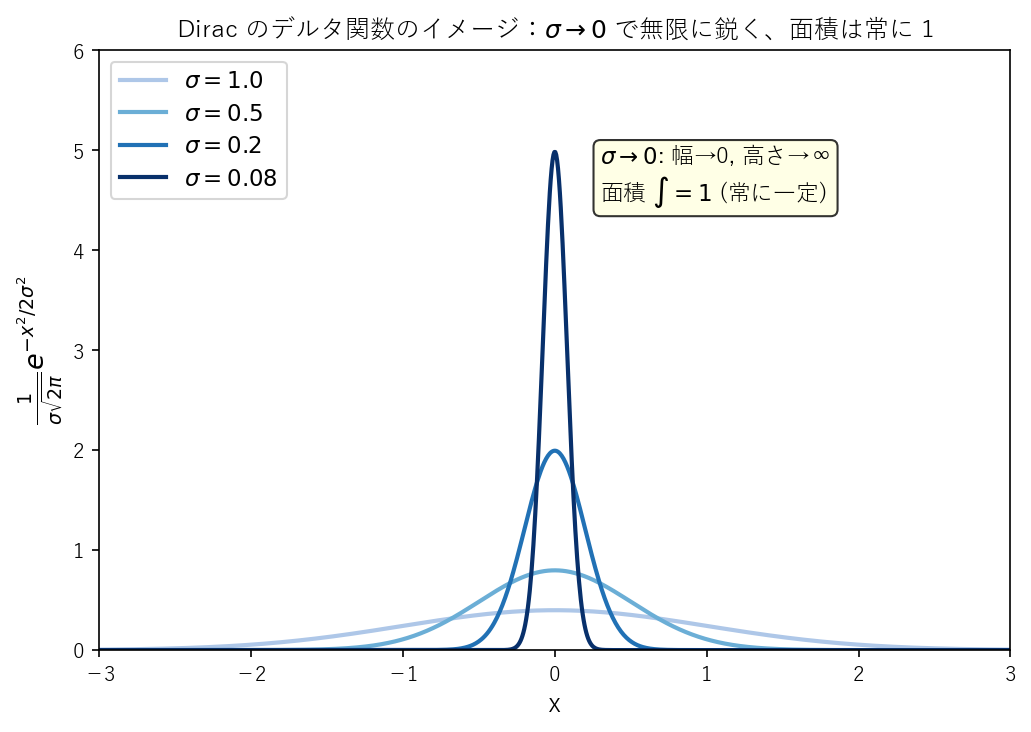
図 1.8: Diracデルタ関数のガウス極限。Dirac のデルタ関数のイメージ。ガウス関数の幅 \(\sigma\) を小さくしていくと、高さは無限大に、幅はゼロに近づくが、面積(積分値)は常に 1 のまま。\(\sigma \to 0\) の極限がデルタ関数。
🟡 リナ: 質点の質量密度は \(\rho(\mathbf{r}) = M\,\delta^3(\mathbf{r})\) と書ける。原点以外(\(r \neq 0\))では \(\rho = 0\) だから、原点以外の領域では Poisson 方程式は \(\nabla^2\Phi = 0\) になる(これを Laplace 方程式と呼ぶ)。
⚪ メイ: 質量のない場所ではポテンシャルの Laplacian がゼロ——「周囲の平均値と中心の値が一致する」ということね。
🟡 リナ: ステップ 2 と同様に球対称性から \(\Phi\) は \(r\) だけの関数になる。この条件のもとで \(\nabla^2\Phi = 0\) を解くと、解は \(\Phi = A/r + B\) の形しかないことが示せる。なぜかを少しだけ説明するわね。直交座標の Laplacian \(\frac{\partial^2\Phi}{\partial x^2} + \frac{\partial^2\Phi}{\partial y^2} + \frac{\partial^2\Phi}{\partial z^2}\) を、球座標 \((r, \theta, \phi)\) に書き換えることができるの。球座標とは、空間の点を「中心からの距離 \(r\)」「北極からの角度 \(\theta\)(緯度の補角)」「東西方向の角度 \(\phi\)(経度)」の 3 つで指定する座標系——地球上の位置を緯度・経度・高度で表すのと同じ発想よ。球対称な問題では直交座標より自然な座標系なの。\(\Phi\) が \(r\) だけの関数のとき、\(\theta\) や \(\phi\) による変化はゼロだから、Laplacian は \(r\) 方向の寄与だけが残って \(\nabla^2\Phi = \frac{1}{r^2}\frac{d}{dr}\left(r^2 \frac{d\Phi}{dr}\right)\) という形になる。
🔵 カイ: あれ、単純に \(d^2\Phi/dr^2\) じゃないんですか? なぜ \(r^2\) が絡んでくるんですか?
🟡 リナ: いい疑問ね。Laplacian は「周囲の平均値からのずれ」だったわね。3 次元では「周囲」は球面で、その面積は \(r^2\) に比例して広がる。だから \(r\) が大きいところでは「周囲」がより広い——この広がりの効果を正しく取り込むために \(r^2\) の因子が必要になるの。もう少し具体的に言うと、\(\frac{d\Phi}{dr}\) は「\(r\) 方向の傾き」で、重力場の動径成分は \(g_r = -d\Phi/dr\) だったわね。発散(湧き出し)を計算するには「球面を通る流束の変化率」を見る必要がある。半径 \(r\) の球面上で \(\nabla\Phi\) の動径成分は一様に \(d\Phi/dr\) だから、これに球面の面積 \(4\pi r^2\) を掛けると「球面を通る \(\nabla\Phi\) の総量」は \(4\pi r^2 \frac{d\Phi}{dr}\) になる。球対称だから全方向に一様で、\(4\pi\) は定数として最後まで残る。\(r\) 方向の変化率を取ると \(\frac{d}{dr}\left(4\pi r^2 \frac{d\Phi}{dr}\right) = 4\pi \frac{d}{dr}\left(r^2 \frac{d\Phi}{dr}\right)\)。これを球殻の体積 \(4\pi r^2\,dr\) で割って「単位体積あたり」に直すと、\(4\pi\) が約分されて \(\frac{1}{r^2}\frac{d}{dr}\left(r^2 \frac{d\Phi}{dr}\right)\) になる。座標変換の詳しい計算は 問題 B-5. \(\nabla^2(r^n)\) の計算 で確認してね。これをゼロと置くと \(\frac{1}{r^2}\frac{d}{dr}\left(r^2 \frac{d\Phi}{dr}\right) = 0\)。\(1/r^2 \neq 0\) だから \(\frac{d}{dr}\left(r^2 \frac{d\Phi}{dr}\right) = 0\)。ある量の微分がゼロということは、その量が定数だということ(高校で「\(f'(x) = 0\) ならば \(f(x) = \text{定数}\)」と習ったのと同じ)。だから \(r^2 \frac{d\Phi}{dr} = \text{定数}\)、つまり \(\frac{d\Phi}{dr} \propto 1/r^2\)。これはステップ 2 で逆二乗法則から得た \(d\Phi/dr = GM/r^2\) と同じ形よね。積分すれば \(\Phi = A/r + B\) が出る。
🔵 カイ: なるほど、球座標に変えて解くと Poisson 方程式から逆二乗法則が出てくるんですね。
🟡 リナ: 無限遠で \(\Phi \to 0\)(\(B = 0\))と原点での強さの条件から \(A = -GM\) が決まって、式 (1.5) の \(\Phi = -GM/r\) が再現される(厳密な導出は 問題 B-6. 点質量外部での Laplace 方程式 で確認してね)。そこから力を計算すれば
万有引力の逆二乗法則がちゃんと再現される。
🔵 カイ: おお、質点の場合は式 (1.1) と同じ結果になるんですね。でも式 (1.7) は質量が広がっている場合にも使えるから、(1.1) の拡張版ということですか?
🟡 リナ: その通り。そして——ここが後で重要になるのだけど——場の言葉で書き直しても、Poisson 方程式には時間 \(t\) が一切含まれていない。この構造的な問題は、この章の後半で詳しく見るわ。
✅ 理解度チェック: 重力ポテンシャル \(\Phi\) と重力場 \(\mathbf{g}\) の関係を式で書いてください。
答え
\(\mathbf{g} = -\nabla\Phi\)。重力場はポテンシャルの勾配にマイナスをつけたもの。物体はポテンシャルが低い方向に引っ張られる。
✅ 理解度チェック: Poisson 方程式 \(\nabla^2 \Phi = 4\pi G\rho\) の左辺 \(\nabla^2 \Phi\) は物理的に何を表すでしょうか?
答え
ポテンシャル \(\Phi\) の空間的な「曲がり具合」(各方向の 2 階偏微分の和)。物質が存在する場所(\(\rho \neq 0\))ではポテンシャルに曲がりが生じる。
✅ 理解度チェック: Gauss の法則(重力版)\(\oint \mathbf{g} \cdot d\mathbf{A} = -4\pi GM\) で、閉曲面の形を変えても右辺が変わらないのはなぜでしょうか?
答え
逆二乗法則 \(|\mathbf{g}| \propto 1/r^2\) と球面の面積 \(4\pi r^2\) が打ち消し合うため、面を通る重力場の総流束は面の形に依存せず、中に含まれる質量だけで決まる。
✅ 理解度チェック: Dirac のデルタ関数 \(\delta^3(\mathbf{r})\) の 2 つの性質を述べてください。
答え
(1) \(\mathbf{r} \neq 0\) では \(\delta^3(\mathbf{r}) = 0\)。(2) 全空間で積分すると \(\int \delta^3(\mathbf{r})\, d^3r = 1\)。質点の質量密度を \(\rho(\mathbf{r}) = M\,\delta^3(\mathbf{r})\) と表すのに使う。
📝 練習問題:
- Laplacian の計算 → 問題 B-5. \(\nabla^2(r^n)\) の計算, 問題 B-6. 点質量外部での Laplace 方程式、一様密度球 → 問題 B-7. 一様密度球内部のポテンシャル定数、Gauss の法則から Poisson 方程式の導出 → 問題 M-1. Gauss の法則から Poisson 方程式の導出、一様密度球のポテンシャル → 問題 M-2. 一様密度球のポテンシャルの完全解
1.3 成功例:海王星の発見¶
🟡 リナ: 限界の話に進む前に、Newton のモデルがどれほど強力だったかを確認しておきましょう。最も劇的な例を紹介するわ。海王星 (Neptune) の発見よ。
🔵 カイ: 海王星って、望遠鏡で見つけたんじゃないんですか?
🟡 リナ: 望遠鏡で「確認」はした。でも、最初に見つけたのは紙とペンの上なの。1781 年に天王星 (Uranus) が発見された後、天文学者たちは Newton のモデルを使って天王星の軌道を計算した。ところが、観測された天王星の位置が、計算で予測された位置からわずかにずれていた。
🔵 カイ: ずれがあったら、どう考えるんですか? モデルが間違っているのか、それとも何か見落としがあるのか……
🟡 リナ: いい問いね。可能性は 2 つ。「Newton のモデルが間違っている」か、「まだ見つかっていない天体が天王星を引っ張っている」か。1846 年、フランスの Le Verrier (ル・ヴェリエ) とイギリスの Adams (アダムズ) がそれぞれ独立に、「未知の惑星がこの位置にあれば天王星の軌道のずれを説明できる」と計算した。Le Verrier はベルリン天文台の Galle (ガレ) に手紙を送り、「この方向を望遠鏡で見てくれ」と頼んだ。
🔵 カイ: それで?
🟡 リナ: Galle が望遠鏡を向けたその夜、Le Verrier が予測した位置のわずか 1° 以内に、新しい惑星が見つかった。それが海王星。
🔵 カイ: すごい! 計算だけで惑星を見つけたんですか!
🟡 リナ: これこそ、プロローグで話した「数式の力」の実例よ。Newton のモデルが定量的な予測を与え、その予測が観測で確認された。反証可能な仮説が検証に耐えた瞬間。Newton のモデルの威力を示す最高の成功例ね。
✅ 理解度チェック: 天王星の軌道のずれに対して、Le Verrier はどのような仮説を立てたでしょうか?
答え
「Newton のモデルが間違っている」のではなく、「まだ見つかっていない未知の惑星が天王星を引っ張っている」と仮説を立て、その惑星の位置を計算で予測した。実際にその位置に海王星が発見された。
✅ 理解度チェック: 海王星の発見が Newton モデルの「成功例」と言える理由は?
答え
天王星の軌道のずれから未知の惑星の位置を Newton モデルで計算し、その予測位置のわずか 1° 以内に実際に海王星が発見されたから。数式による定量的予測が観測で確認された。
1.4 限界①:水星の近日点移動¶
🟡 リナ: しかし、同じ Le Verrier が、Newton のモデルでは説明できない現象も発見していたの。水星 (Mercury) の近日点移動 (precession of perihelion (プリセッション・オブ・ペリヘリオン)) よ。
🔵 カイ: 近日点移動って何ですか?
🟡 リナ: 惑星は太陽の周りを楕円軌道で回っている。楕円には太陽に最も近い点があって、それを近日点 (perihelion) と呼ぶ。もし太陽と惑星だけなら、Newton のモデルでは楕円軌道は永遠に同じ形を繰り返す。でも実際には他の惑星の重力の影響で、楕円の向き——つまり近日点の位置——が少しずつ回転していくの。これが近日点移動。
🔵 カイ: 他の惑星が引っ張っている分は、Newton のモデルで計算できるんじゃないですか?
🟡 リナ: そう。Le Verrier は、金星、木星、地球などすべての既知の惑星の影響を Newton のモデルで精密に計算した。ところが、計算値と観測値が合わなかった。観測された水星の近日点移動は、Newton のモデルの予測より 100 年あたり約 43 秒角 (arcsecond) だけ大きかったの。
🔵 カイ: 43 秒角って、どのくらいですか?
🟡 リナ: 1 秒角は 1 度の 3600 分の 1。つまり 43 秒角は約 0.012 度。100 年でこれだけ。途方もなく小さいずれよ。
🔵 カイ: そんな小さなずれ、測定誤差じゃないんですか?
🟡 リナ: いい質問。でも 19 世紀の天文学者たちの観測精度は驚くほど高くて、このずれは測定誤差をはるかに超えていた。Le Verrier は海王星のときと同じ戦略——「未知の惑星がある」——を試みて、水星より内側に Vulcan (バルカン) という惑星があると予測した。
🔵 カイ: 海王星のときみたいに見つかったんですか?
🟡 リナ: いいえ。何十年も探されたけれど、Vulcan は見つからなかった。これは Newton のモデルの予測が観測と合わない——つまり反証されかけている状態。プロローグの言葉で言えば、Newton のモデルは「実験と矛盾していない最良の仮説」とは言えなくなってきた瞬間ね。
⚪ メイ: 海王星のときは「未知の惑星」の仮説が成功したけど、水星では同じ戦略が失敗した——モデル自体に問題がある可能性が出てきたということね。
🟡 リナ: 図 1.9「水星の近日点移動(誇張して描画)」 を見て。楕円軌道の近日点が周回ごとに少しずつ回転していく様子を誇張して描いたものよ。
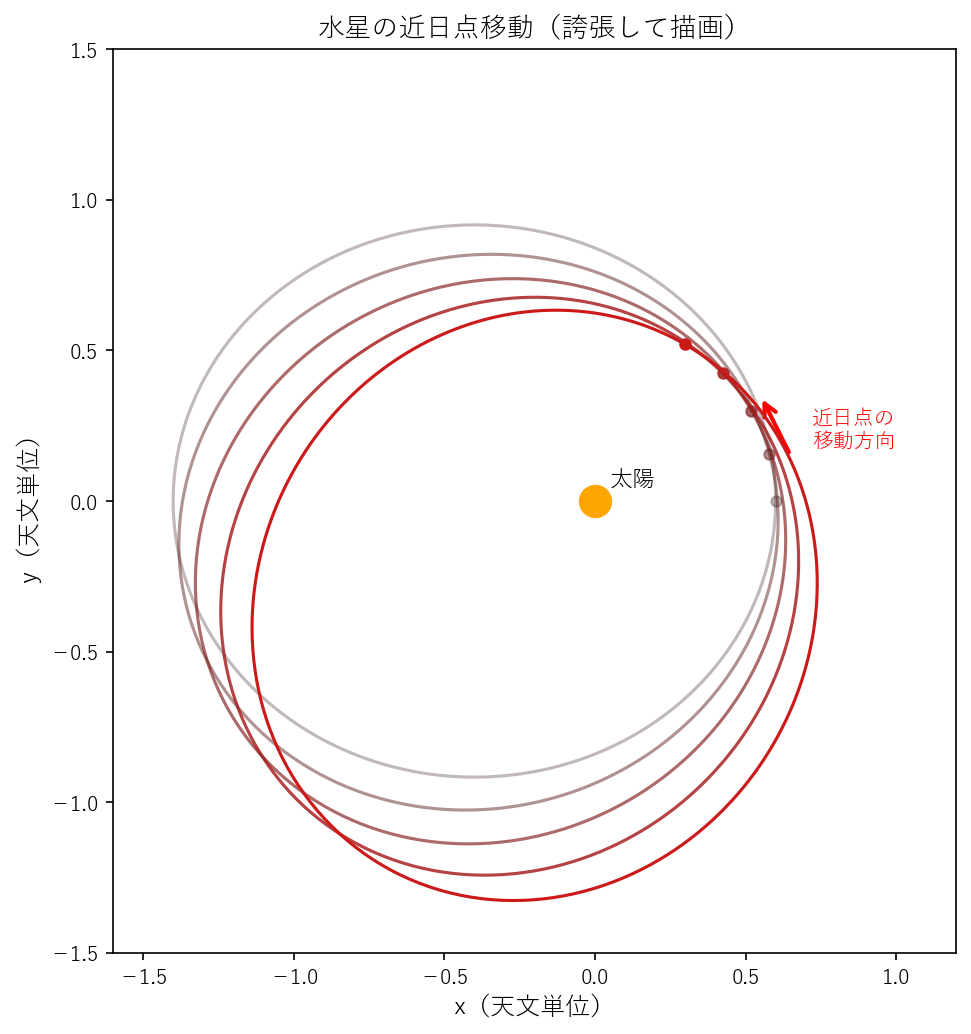
図 1.9: 水星の近日点移動(誇張して描画)。楕円軌道の近日点(太陽に最も近い点)が、周回ごとに少しずつ回転していく。Newton のモデルでは他の惑星の影響を考慮しても 100 年あたり 43 秒角のずれが残る。
✅ 理解度チェック: 水星の近日点移動の問題で、Le Verrier が海王星のときと同じ戦略を試みたが失敗した。その戦略とは何でしょうか?
答え
水星より内側に未知の惑星 Vulcan が存在すると仮定し、それが水星の軌道のずれを説明すると予測した。しかし Vulcan は何十年探しても見つからず、この戦略は失敗した。
🟡 リナ: この 43 秒角のずれは、1915 年に Einstein が一般相対論を完成させたとき、追加のパラメータなしにぴたりと説明された。Einstein 自身、この計算結果を得たとき「数日間、興奮で我を忘れた」と語っているわ。
✅ 理解度チェック: 水星の近日点移動で Newton モデルの予測と観測がずれる量は、100 年あたり約何秒角でしょうか?
答え
約 43 秒角(arcsecond)。このずれは 1915 年に Einstein の一般相対論によって追加パラメータなしに説明された。
📝 練習問題:
- 水星の近日点移動のスケール評価 → 問題 M-3. 水星の近日点移動のスケール評価
1.5 限界②:重力の瞬時伝播——Poisson 方程式の構造的問題¶
🟡 リナ: 水星の近日点移動は「観測とのずれ」という経験的な問題だった。でも Newton のモデルには、もっと根本的な——理論の構造そのものに潜む問題がある。
🔵 カイ: 構造の問題?
🟡 リナ: 万有引力の式 (1.1) をもう一度見て。
この式には時間 \(t\) が一切含まれていない。つまり太陽が突然消えたら、\(m_1 = 0\) となって \(F = 0\)——地球はその瞬間に太陽の重力を感じなくなる。1.5 億 km も離れているのに。
🔵 カイ: 光が太陽から地球に届くのに約 8 分かかるのに、重力の情報は 0 秒で届くってことですか?
🟡 リナ: そう。これが即時の遠隔作用 (action at a distance) と呼ばれる問題よ。実は、Newton 自身もこの点に不満を感じていた。友人への手紙でこう書いているの——「物質が他の物質に、何の媒介もなく、距離を隔てて作用するというのは、哲学的な問題を考えることのできる人間にとって、あまりにも馬鹿げた考えだ」と。
🔵 カイ: Newton 自身が「おかしい」と思っていたんですね……
🟡 リナ: そして Poisson 方程式 (1.7) でも同じ構造問題が見える。左辺の \(\nabla^2\Phi\) には空間微分しか含まれていない。時間微分 \(\partial^2\Phi/\partial t^2\) がどこにもない。
🔵 カイ: ということは、右辺の \(\rho\) が変わった瞬間に、\(\Phi\) も空間全体で一斉に変わる……?
🟡 リナ: その通り。Poisson 方程式は重力場の変化が無限大の速さで伝播することを暗黙のうちに仮定しているの。太陽が突然消えたら、1.5 億 km 離れた地球でもその瞬間に重力が消える。
🔵 カイ: でも、それの何がまずいんですか?
🟡 リナ: ここで、今後の章で詳しく扱う特殊相対論の結論を 1 つだけ先取りさせて。特殊相対論によれば、いかなる信号も光速 \(c \approx 3.0 \times 10^8\ \mathrm{m/s}\) を超えて伝わることはできない。光が太陽から地球に届くのに約 8 分かかる。太陽が消えたという「情報」も、少なくとも 8 分はかかるはずなの。
⚪ メイ: つまり、Newton の重力は「情報が瞬時に伝わる」ことを暗黙に仮定していて、それは特殊相対論の大原則に真っ向から矛盾するということね。
🟡 リナ: 対照的に、電磁気学の場の方程式は(ポテンシャルの取り方に残る自由度を固定する「ゲージ条件」と呼ばれる数学的な整理をすると)こういう形になる:
ここで \(\varphi\) は電磁スカラーポテンシャル(重力の \(\Phi\) に対応するもの)、\(\rho_e\) は電荷密度(重力の質量密度 \(\rho\) に対応)、\(\varepsilon_0\) は真空の誘電率(電磁気の定数で、クーロンの法則 \(F = \frac{1}{4\pi\varepsilon_0}\frac{q_1 q_2}{r^2}\) に出てくるもの)。右辺のマイナスは単位系の慣例によるもので、今は気にしなくていい。今は各記号の詳細より、方程式の構造に注目して。この方程式は波動方程式と呼ばれる形をしている。なぜ速度 \(c\) の波になるか、直感だけ伝えておくわね。1 次元で考えると \(\frac{\partial^2 \varphi}{\partial x^2} = \frac{1}{c^2}\frac{\partial^2 \varphi}{\partial t^2}\) という形になる。この方程式の解は \(\varphi(x, t) = f(x - ct)\)——つまり「形を変えずに速度 \(c\) で移動する波」になるの。
🔵 カイ: \(f(x - ct)\) が波になるって、どういうことですか?
🟡 リナ: こう考えて。時刻 \(t = 0\) で \(\varphi = f(x)\) という形をしていたとする。時刻 \(t\) では \(\varphi = f(x - ct)\)。\(f\) の中身が同じ値になる場所——たとえば山のてっぺん——は \(x - ct = \text{一定}\)、つまり \(x = ct + \text{一定}\) の位置にある。これは速度 \(c\) で右に動いている。だから \(f(x - ct)\) は「形を保ったまま速度 \(c\) で進む波」なの。
🔵 カイ: あ、山のてっぺんの位置を追跡すると、毎秒 \(c\) ずつ右に進んでいくんですね。
🟡 リナ: そう。実際に代入して確認すると、\(u = x - ct\) と置く。\(\varphi = f(u)\) を \(x\) で偏微分するには、高校で習った合成関数の微分(連鎖律)\(\frac{d}{dx}f(g(x)) = f'(g(x)) \cdot g'(x)\) を使う。ここで \(f'(u)\) は「\(f\) を変数 \(u\) で普通に微分したもの」(\(f\) は \(u\) だけの 1 変数関数だから偏微分ではなく通常の微分)。\(u = x - ct\) だから \(\partial u/\partial x = 1\)(\(t\) は固定)。よって \(\frac{\partial \varphi}{\partial x} = f'(u) \cdot 1 = f'(u)\)、もう一度微分して \(\frac{\partial^2 \varphi}{\partial x^2} = f''(u)\)。一方 \(t\) で偏微分するとき \(\partial u/\partial t = -c\)(\(x\) は固定)だから \(\frac{\partial \varphi}{\partial t} = f'(u) \cdot (-c) = -c\,f'(u)\)、もう一度微分して \(\frac{\partial^2 \varphi}{\partial t^2} = (-c)^2 f''(u) = c^2 f''(u)\)。したがって \(\frac{\partial^2\varphi}{\partial x^2} = f''(u)\) と \(\frac{1}{c^2}\frac{\partial^2\varphi}{\partial t^2} = \frac{1}{c^2} \cdot c^2 f''(u) = f''(u)\) が等しく、確かに方程式を満たす。
⚪ メイ: きれいに一致するのね。\(c^2\) が分母と分子で打ち消し合って \(f''(u) = f''(u)\) になる。
🟡 リナ: \(\nabla^2\) と \(\frac{1}{c^2}\frac{\partial^2}{\partial t^2}\) の組み合わせが、まさに「速度 \(c\) で伝わる波」を記述する構造なのよ。これが電磁波。つまり、方程式の構造——時間微分があるかないか——が、場の変化の伝わり方を決めているの。
⚪ メイ: つまり、場の方程式に時間の 2 階微分が入っているかどうかで、「変化が瞬時に伝わるか、有限速度で波として伝わるか」が決まるのね。
🟡 リナ: その通り。方程式の構造が物理——伝播の仕方——を支配しているの。ソースがない領域(\(\rho_e = 0\))では右辺がゼロになって、純粋な波動方程式 \(\nabla^2\varphi = \frac{1}{c^2}\frac{\partial^2 \varphi}{\partial t^2}\) になる。重力の Poisson 方程式と電磁気の波動方程式を表にして並べてみると、問題が一目瞭然よ。
表 1.2: Newton重力と電磁気学の場の方程式の比較
| Newton 重力 | 電磁気学 | |
|---|---|---|
| 場の方程式 | \(\nabla^2 \Phi = 4\pi G\rho\) | \(\left(\nabla^2 - \frac{1}{c^2}\frac{\partial^2}{\partial t^2}\right)\varphi = -\frac{\rho_e}{\varepsilon_0}\) |
| 時間微分 | なし | あり (\(\partial^2/\partial t^2\)) |
| 伝播速度 | 無限大 | 光速 \(c\) |
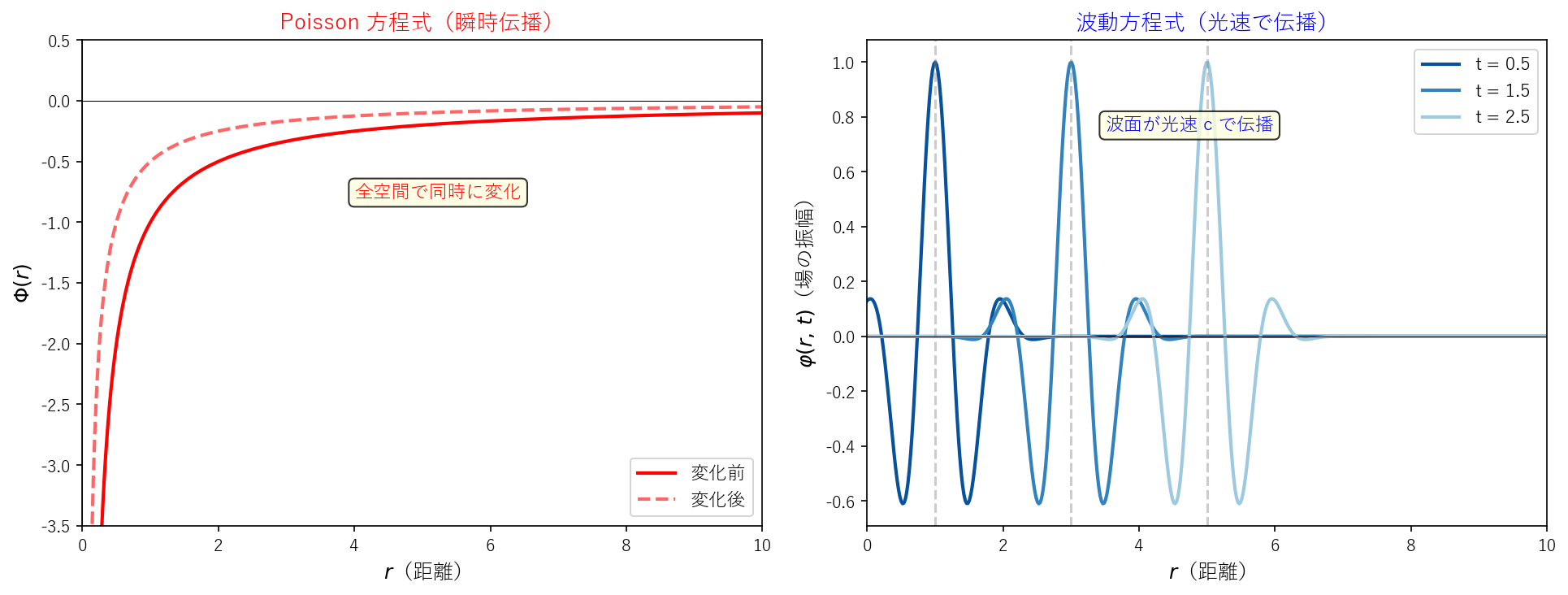
図 1.10: Poisson方程式と波動方程式の対比。左 — Poisson 方程式では場の変化が全空間で同時に起こる(瞬時伝播)。右 — 波動方程式では場の変化が波面として光速 \(c\) で伝播する。
🟡 リナ: 表にまとめると構造の違いが一目瞭然ね。図 1.10「Poisson方程式と波動方程式の対比」 も見て。左の Poisson 方程式では場の変化が全空間で同時に起こるのに対して、右の波動方程式では波面として光速 \(c\) で広がっていく様子が描かれているわ。
⚪ メイ: 時間微分の有無だけで、伝播速度が「無限大」か「光速」かが決まってしまうのね。
🔵 カイ: じゃあ Newton の重力って、光速で情報が伝わる宇宙では「ありえない」ってことですか? でも、Newton の式に \(\frac{1}{c^2}\frac{\partial^2}{\partial t^2}\) を足せば直るんじゃ……?
🟡 リナ: いい発想ね。実際にそういう試みもあった。でも単純に時間微分の項を足すだけでは、他の物理的要請と矛盾してしまうの。たとえば、重力は常に引力(引き合う力)よね。ところが波動方程式にすると「斥力の波」も解として許されてしまい、重力が常に引力であるという観測事実と合わなくなる。正しい修正は、時空そのものの構造を変えるという、もっと根本的なものになる。それが一般相対論よ。詳しくは 問題 A-1. スカラー重力理論の試み で確認してね。
✅ 理解度チェック: Poisson 方程式に時間微分 \(\partial^2/\partial t^2\) が含まれないことは、物理的に何を意味するでしょうか?
答え
重力場の変化が無限大の速さで(瞬時に)伝播することを意味する。これは特殊相対論の「いかなる信号も光速を超えて伝わることはできない」という原則と矛盾する。
📝 練習問題:
- 瞬時伝播の矛盾 → 問題 B-9. 瞬時伝播と特殊相対論の矛盾、波動方程式と Poisson 方程式の比較 → 問題 M-4. 波動方程式と Poisson 方程式の比較、スカラー重力理論の試み → 問題 A-1. スカラー重力理論の試み
🟡 リナ: だから、Newton の重力モデルはより正確なモデルの近似にすぎないということになる。日常的なスケールや太陽系の惑星運動のほとんどの場面では Newton のモデルは驚くほど正確。でも、光速に近い速度や非常に強い重力場のような極端な状況では、もっと正確なモデルが必要になる。
1.6 いつ Newton モデルでは不十分になるか?¶
🟡 リナ: 最後に、プロローグで紹介した判定基準をもう一度見ておきましょう。天体の質量 \(M\) と特徴的な半径 \(R\)——星なら表面の半径、ブラックホールなら後で学ぶ Schwarzschild 半径——を使って
という無次元量 (dimensionless quantity) を計算する。
⚪ メイ: なぜこの量が判定基準になるの?
🟡 リナ: この章の前半で、重力ポテンシャルは \(\Phi = -GM/r\) だと学んだわね(式 1.5)。ポテンシャル \(\Phi\) は「単位質量あたりのエネルギー」に対応する量だから、質量 \(m\) の物体の重力ポテンシャルエネルギーは \(U = m\Phi\)——高校で習った \(U = mgh\) の一般化よ(地表付近では \(\Phi \approx gh\) だから \(U = m\Phi = mgh\) に帰着する)。天体の表面(\(r = R\))では \(U = m\Phi = -GMm/R\)。一方、特殊相対論によれば物体の静止エネルギーは \(E = mc^2\)。この 2 つの比を取ると
\(m\) が約分されて、天体の性質(\(M\) と \(R\))だけで決まる無次元量になる。
🔵 カイ: あ、重力のエネルギーと静止エネルギーの比なんですね。だから \(c^2\) で割るのか。
🟡 リナ: そう。この比が小さいとき——重力ポテンシャルエネルギーが静止エネルギーに比べてずっと小さいとき——Newton のモデルは優れた近似になる。でも 1 に近づくと、Newton の近似では捉えきれない時空の曲がりが無視できなくなる。プロローグの表を再掲するわね。
表 1.3: 代表的天体のコンパクトネス指標
| 天体 | \(GM/(Rc^2)\) の目安 |
|---|---|
| 地球 | \(\sim 10^{-9}\) |
| 太陽 | \(\sim 10^{-6}\) |
| 白色矮星 (white dwarf) | \(\sim 10^{-4}\) |
| 中性子星 (neutron star) | \(\sim 0.1\) |
| ブラックホール (black hole) | \(\sim 1\) |
⚪ メイ: 水星の近日点移動のずれが小さかった(100 年で 43 秒角)のも、太陽の \(GM/(Rc^2) \sim 10^{-6}\) が小さいことと対応しているわね。Newton モデルからのずれは小さいけれど、ゼロではない。
🟡 リナ: そしてプロローグで見たように、地球の \(10^{-9}\) ですら GPS の原子時計のような精密技術では無視できない。\(GM/(Rc^2)\) が大きいときだけでなく、測定精度がこの値に匹敵するほど高いときにも一般相対論が必要になるの。図 1.11「Newton模型の適用範囲と相対論的指標」 に天体ごとの値をまとめたわ。
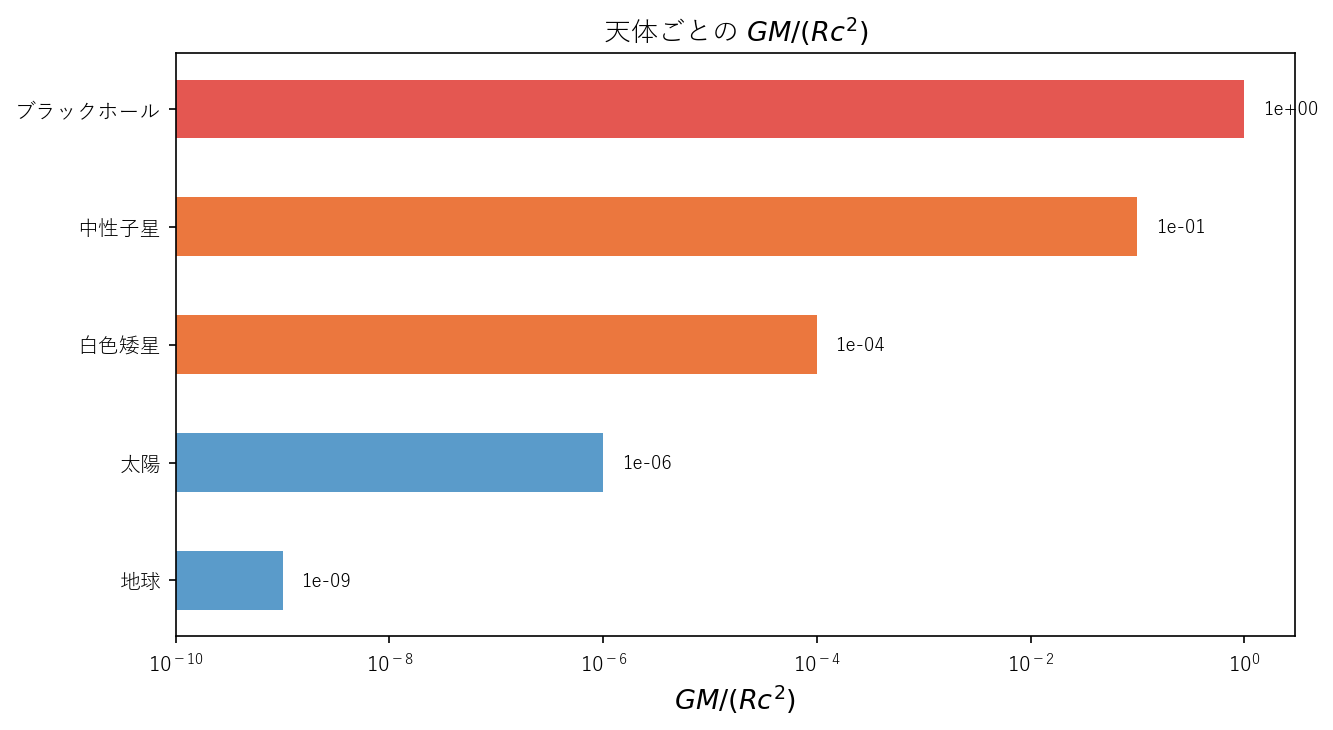
図 1.11: Newton模型の適用範囲と相対論的指標。天体ごとの \(GM/(Rc^2)\) の値。この値が大きいほど一般相対論的効果が顕著になる。
✅ 理解度チェック: \(GM/(Rc^2) \sim 10^{-9}\) の地球でも一般相対論が必要になる場合があるのはなぜでしょうか?
答え
GPS の原子時計のように測定精度が極めて高い技術では、\(10^{-9}\) 程度の小さな相対論的効果でも無視できなくなるから。\(GM/(Rc^2)\) が小さくても、測定精度がその値に匹敵するほど高ければ一般相対論が必要になる。
✅ 理解度チェック: \(GM/(Rc^2)\) は物理的にどんな量の比を表しているでしょうか?
答え
天体表面での重力ポテンシャルエネルギー \(|U| = GMm/R\) と静止エネルギー \(E = mc^2\) の比。この比が 1 に近づくと Newton の近似では捉えきれない時空の曲がりが無視できなくなる。
📝 練習問題:
- \(GM/(Rc^2)\) の計算 → 問題 B-10. 太陽表面での相対論的効果の見積もり, 問題 B-11. 中性子星の相対論判定基準の概算、脱出速度と \(GM/(Rc^2)\) の関係 → 問題 B-5. Schwarzschild 半径の導出, 問題 B-6. Schwarzschild 半径での判定基準、球殻定理と潮汐力 → 問題 A-2. 球殻定理と潮汐力
🟡 リナ: その通り。Newton のモデルは近似としては素晴らしい。でも、あくまで近似。この近似を超えるモデルが Einstein の一般相対論。そこに至る道を辿る前に、もう一つだけ準備しておきたいことがあるの。
1.7 もう一つの定式化 — 最小作用の原理¶
🟡 リナ: ここで話題を変えて、Newton 力学のもう一つの定式化を紹介するわ。
🔵 カイ: え、Newton の限界の話をしていたのに、なぜ今ここで別の定式化を?
🟡 リナ: いい質問。理由は、この先の一般相対論で \(F = ma\) は使えなくなるから。一般相対論では重力は「力」ではなく「時空の曲がり」として記述される——曲がった時空を自由に動く物体は力を受けていないのに加速して見える。だから「力が加速度を生む」という \(F = ma\) の枠組み自体が使えなくなるの。代わりに使うのが、今から紹介する最小作用の原理。第 8 章 測地線方程式 も 第 14 章 Einstein方程式 も Appendix C 場の理論 も、全てこの原理から導出される。つまりこれが、この先の全ての章で使う「共通言語」になる。
⚪ メイ: だから、まだ簡単な Newton 力学のうちに道具に慣れておこう、ということね。
🟡 リナ: その通り。今日は \(F = ma\) を最小作用の原理から再導出する。答えは同じだけど、導出の枠組みが違う。この枠組みを身につけておけば、曲がった時空に行っても同じ手順で運動方程式が出せるようになるわ。
🔵 カイ: 同じ物理なのに、全く違う視点で記述できるって、具体的にはどう違うんですか? \(F = ma\) は「力が加わったら加速する」っていう、原因と結果の話ですよね。それ以外の見方ってどういうこと?
🟡 リナ: いい質問。Newton の \(F = ma\) は「力が加速度を決める」という因果的な記述——「今の力が次の瞬間の運動を決める」という因果の連鎖ね。最小作用の原理は、全く違う発想をとる——「出発点から到着点までの経路を全体として眺めて、ある量を極値にする経路が実現する」という、いわば「全体最適」の視点。因果の連鎖ではなく、経路全体の性質で運動が決まるの。
🟡 リナ: 具体例で見てみましょう。ボールを投げ上げる。Newton の方法では「各瞬間に重力 \(F = -mg\) が加速度 \(a = -g\) を生む」と考えて、時刻を一歩ずつ進めながら運動方程式を解く——「今の力が次の瞬間の運動を決める」という因果の連鎖ね。
🔵 カイ: 時刻 0 の状態から時刻 1 の状態を計算して、時刻 1 から時刻 2 を計算して……ってドミノ倒しみたいに進めるイメージですね。
🟡 リナ: そう。最小作用の原理では、全く違う視点をとる。出発点から到着点までの経路を全体として眺めて、「どの経路が自然に選ばれるか」を判定する:
🟡 リナ: 「ボールが取りうる全ての経路の中で、作用という量を極値(停留値)にする経路が、実際にボールが辿る経路である」——これが最小作用の原理 (principle of least action)。停留値とは「1 次の変化がゼロ」ということ——高校で \(f'(x) = 0\) となる点(停留点)が極大にも極小にもなりうるのと同じで、\(\delta S = 0\) の経路は作用が最小とは限らず、極大や鞍点の場合もある。でも歴史的に「最小作用の原理」と呼ばれているの。
🟡 リナ: 図 1.12「最小作用の原理:経路の選択」 を見て。灰色の線は「取りうる経路」の例で、赤い太線が実際に自然が「選ぶ」経路よ。
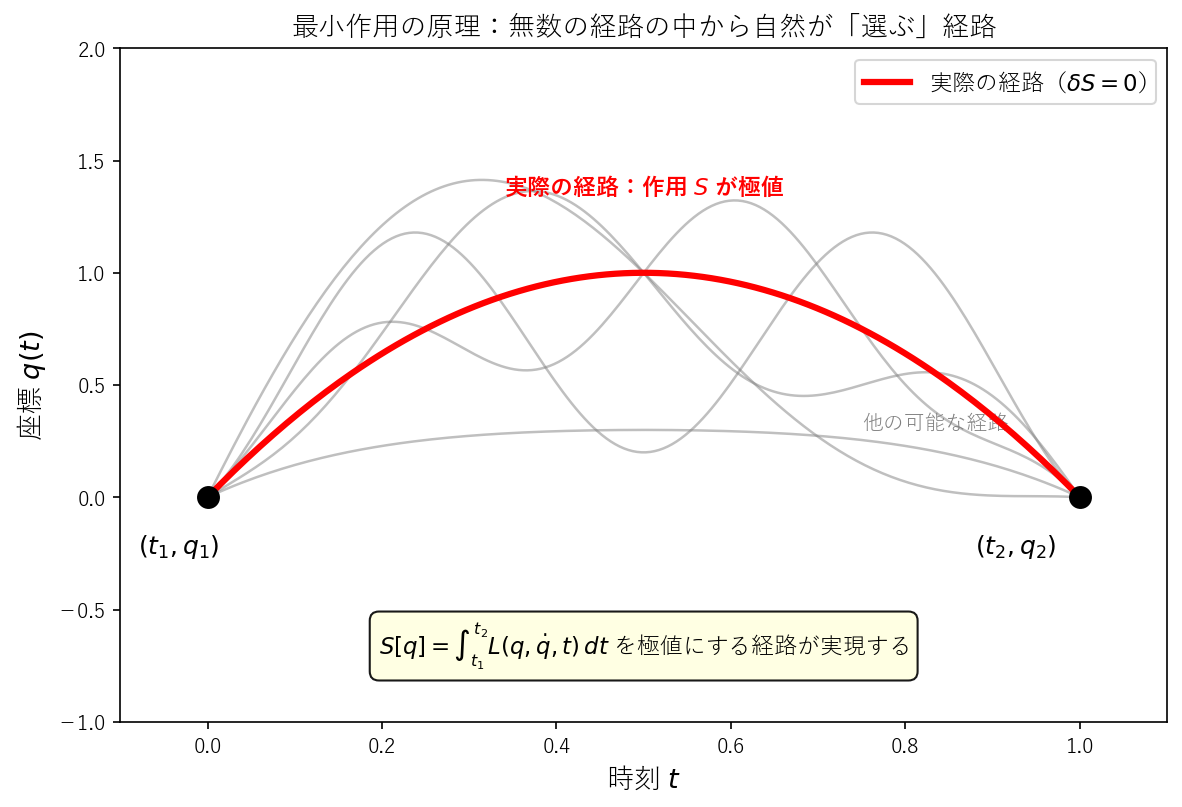
図 1.12: 最小作用の原理:経路の選択。始点 \((t_1, q_1)\) と終点 \((t_2, q_2)\) を結ぶ無数の経路(灰色)の中で、作用 \(S = \int L\,dt\) を極値にする経路(赤)が物理的に実現する。
🔵 カイ: 作用?
作用と Lagrangian の定義¶
🟡 リナ: 作用(action) \(S\) は、運動エネルギー \(T\) とポテンシャルエネルギー \(V\) の差 \(L = T - V\) を、出発時刻 \(t_1\) から到着時刻 \(t_2\) まで時間で積分したもの:
\(L = T - V\) を Lagrangian(ラグランジアン)と呼ぶ。ここで \(T\) は運動エネルギー(速度の関数)、\(V\) はポテンシャルエネルギー(位置の関数)——高校で習った \(V = mgh\) や \(V = \frac{1}{2}kx^2\) と同じもの。\(\dot{x}\) のようにドットをつけた記号は時間微分を表す省略記法で、\(\dot{x} = dx/dt\)(速度)、\(\ddot{x} = d^2x/dt^2\)(加速度)よ。たとえば質量 \(m\) の粒子なら運動エネルギーは \(T = \frac{1}{2}mv^2 = \frac{1}{2}m\dot{x}^2\) と書ける。物理学では頻繁に使う記法だから覚えておいてね。
🔵 カイ: エネルギーの「和」じゃなくて「差」? なんで差なんですか?
🟡 リナ: 最小作用の原理自体が公理だから、「なぜ \(T - V\) なのか」に対する深い理由はないの。Newton の \(F = ma\) も「なぜこの形なのか」は説明できない。どちらも「この原理から出発すると、実験と合う結果が出る」という意味で正当化される。もし \(T + V\) を使ったらどうなるか? この後の 「Newton の運動方程式の再現」 で \(L = T - V\) から \(m\ddot{x} = -dV/dx\) が出ることを確認するけれど、もし \(L = T + V = \frac{1}{2}m\dot{x}^2 + V(x)\) としたら、\(\partial L/\partial x = +dV/dx\) となって、Euler-Lagrange 方程式は \(m\ddot{x} = +dV/dx\) になる。これは「ポテンシャルが高い方に加速する」——ボールが坂を登っていく運動を予測してしまう。\(T - V\) でないと実験と合わないの。
⚪ メイ: つまり、\(L = T - V\) は「実験と合う結果を出す公理」であって、「なぜ」は問わない。プロローグで「モデルの出発点は説明の対象ではない」と言ったのと同じ構造ね。
Euler-Lagrange 方程式の導出¶
🟡 リナ: 最小作用の原理から運動方程式を導出してみましょう。これが変分法(calculus of variations)の核心よ。
変分法とは: 「全ての可能な経路の中で、作用 \(S\) を極値にする経路はどれか?」を求める数学的手法。普通の微分は「関数の極値」を求めるが、変分法は「経路(関数そのもの)の極値」を求める。
🟡 リナ: 具体的に計算する前に、座標の記法を整理しておくわね。ここから一般化座標という言葉を使うの。
🔵 カイ: 「一般化座標」? 普通の \(x, y, z\) とは違うんですか?
🟡 リナ: いい質問。一般化座標(generalized coordinates)とは、系の状態を記述するために選んだ変数のこと。直交座標 \(x, y, z\) に限らず、問題に合わせて自由に選べる。たとえば振り子なら角度 \(\theta\) 1 つで状態が決まるし、二重振り子なら \(\theta_1, \theta_2\) の 2 つ。「系の自由度の数だけ、好きな変数を選んでよい」というのが一般化座標の考え方。
⚪ メイ: つまり、\(x\) や \(y\) は一般化座標の特殊な場合で、問題の対称性や拘束条件に合わせて最も自然な変数を選ぶのが一般化座標ということね。
🟡 リナ: そう。記号は慣例的に \(q\) を使う。自由度が \(n\) 個あれば \(q_1, q_2, \ldots, q_n\) と書く。ここでは簡単のため 1 自由度 \(q(t)\) で話を進めるわ。
✅ 理解度チェック: 一般化座標とは何でしょうか? 直交座標 \((x, y, z)\) との違いは?
答え
一般化座標とは、系の状態を記述するために問題に合わせて自由に選んだ変数のこと。直交座標は一般化座標の特殊な場合であり、振り子なら角度 \(\theta\)、二重振り子なら \(\theta_1, \theta_2\) のように、系の自由度と対称性に合った変数を選べる。
🔵 カイ: でも、さっきまで \(L = T - V\) って書いてましたよね。\(L(q, \dot{q}, t)\) って何が変わったんですか?
🟡 リナ: 中身は同じよ。たとえば振り子なら \(T = \frac{1}{2}m l^2 \dot{\theta}^2\)、\(V = -mgl\cos\theta\) だから、\(L = T - V\) を書き下すと \(\theta\) と \(\dot{\theta}\) の関数になる。つまり \(L = T - V\) の中身を一般化座標 \(q\) とその時間微分 \(\dot{q}\) で表したものが \(L(q, \dot{q}, t)\) という表記。「\(T - V\) の具体的な形は問題ごとに違うけど、どんな場合でも \(q\) と \(\dot{q}\)(と場合によっては時刻 \(t\))で書ける」ということを強調した書き方ね。
🟡 リナ: 一般化座標 \(q(t)\) を使って Lagrangian \(L(q, \dot{q}, t)\) が与えられているとする。ここで \(\dot{q} = dq/dt\) は速度。作用は:
ここで \(S[q]\) の角括弧は、\(S\) が「ある時刻での値」ではなく「経路 \(q(t)\) 全体の形」に依存する量であることを示す記法よ。こういう量を汎関数 (functional)と呼ぶの。この先の章でも「作用汎関数を極値にする」という言い方が繰り返し出てくるから、この用語に慣れておいてね。普通の関数と汎関数の違いを整理しておくわね。普通の関数 \(f(x)\) は数 \(x\) を入れると数 \(f\) が出てくる。汎関数 \(S[q]\) は関数 \(q(t)\)(経路の形)を入れると数 \(S\) が出てくる——入力が「数」か「関数」かの違い。
🔵 カイ: 関数を入れると数が出てくる……関数の「メタ関数」みたいな感じですか。
🟡 リナ: そうね。身近な例で感覚を掴みましょう。「曲線の長さ」は汎関数よ——同じ 2 点を結ぶ曲線でも、直線で結べば短いし、くねくね曲がれば長い。曲線の形(関数)を入れると長さ(数)が出てくる。では作用の具体例を見てみましょう。地面から高さ \(h\) の点にボールを投げ上げる場合を考えて。時刻 \(t_1\) に地面を出発し、時刻 \(t_2\) に高さ \(h\) に到達するという始点と終点を固定する。この 2 点を結ぶ経路は無数にある——「等加速度で上がる経路」もあれば、「最初にゆっくり上がって後半で急加速する経路」もある(後者は物理的には実現しないけれど、数学的には考えられる仮想的な経路よ)。それぞれの経路で \(T\) と \(V\) の時間変化のパターンが違うから、\(L = T - V\) の時間積分の値——つまり作用 \(S\)——は経路によって異なる。経路の形を入れると作用という 1 つの数が出てくる——まさに汎関数ね。そして最小作用の原理は「\(S\) を極値(停留値)にする経路が実際に実現する」と主張するの。この後の 「重力場中の自由落下の例」 で、それが等加速度運動(\(\ddot{y} = -g\))であることを確認するわ。
🔵 カイ: ちょっと待ってください。\(\dot{q}\) って \(q\) の時間微分ですよね? なのに \(L(q, \dot{q}, t)\) って、\(q\) と \(\dot{q}\) をまるで無関係な変数みたいに並べてる。偏微分 \(\frac{\partial L}{\partial q}\) とか \(\frac{\partial L}{\partial \dot{q}}\) って、片方を固定してもう片方で微分するってことですよね? \(\dot{q}\) は \(q\) から決まるのに、固定できるんですか?
🟡 リナ: 鋭い。ここが Lagrangian 力学で最初につまずくポイント。考え方はこう——\(L(q, \dot{q}, t)\) を「2 つの独立な入力スロットを持つ関数」として定義する。振り子なら \(L(\theta, \omega) = \frac{1}{2}ml^2\omega^2 + mgl\cos\theta\) という「\(\theta\) と \(\omega\) の 2 変数関数」をまず作る。偏微分はこの段階で計算する。\(\frac{\partial L}{\partial \theta}\) は \(\omega\) を固定して \(\theta\) で微分、\(\frac{\partial L}{\partial \omega}\) は \(\theta\) を固定して \(\omega\) で微分。
⚪ メイ: つまり、偏微分を計算する段階では \(q\) と \(\dot{q}\) は「ただの 2 つの変数」として扱って、「\(\dot{q}\) は \(q\) の時間微分」という関係は、偏微分を計算し終わった後に Euler-Lagrange 方程式の中で初めて使う——という二段構えなのね。
🟡 リナ: その通り。「関数の形を決める段階」と「実際の運動経路に当てはめる段階」を分けるのがコツよ。
✅ 理解度チェック: \(L(q, \dot{q}, t)\) の偏微分 \(\partial L/\partial q\) を計算するとき、\(\dot{q}\) は \(q\) の時間微分であるにもかかわらず「固定」して扱える理由は?
答え
\(L\) をまず「\(q\) と \(\dot{q}\) という 2 つの独立な入力スロットを持つ関数」として定義し、偏微分はこの段階で計算する。「\(\dot{q}\) は \(q\) の時間微分」という関係は、偏微分を計算し終わった後に Euler-Lagrange 方程式の中で初めて使う。
🟡 リナ: 実際の経路 \(q(t)\) を少しだけずらした経路 \(q(t) + \delta q(t)\) を考える。図 1.13「変分 \(\delta q(t)\) のイメージ」 を見て。
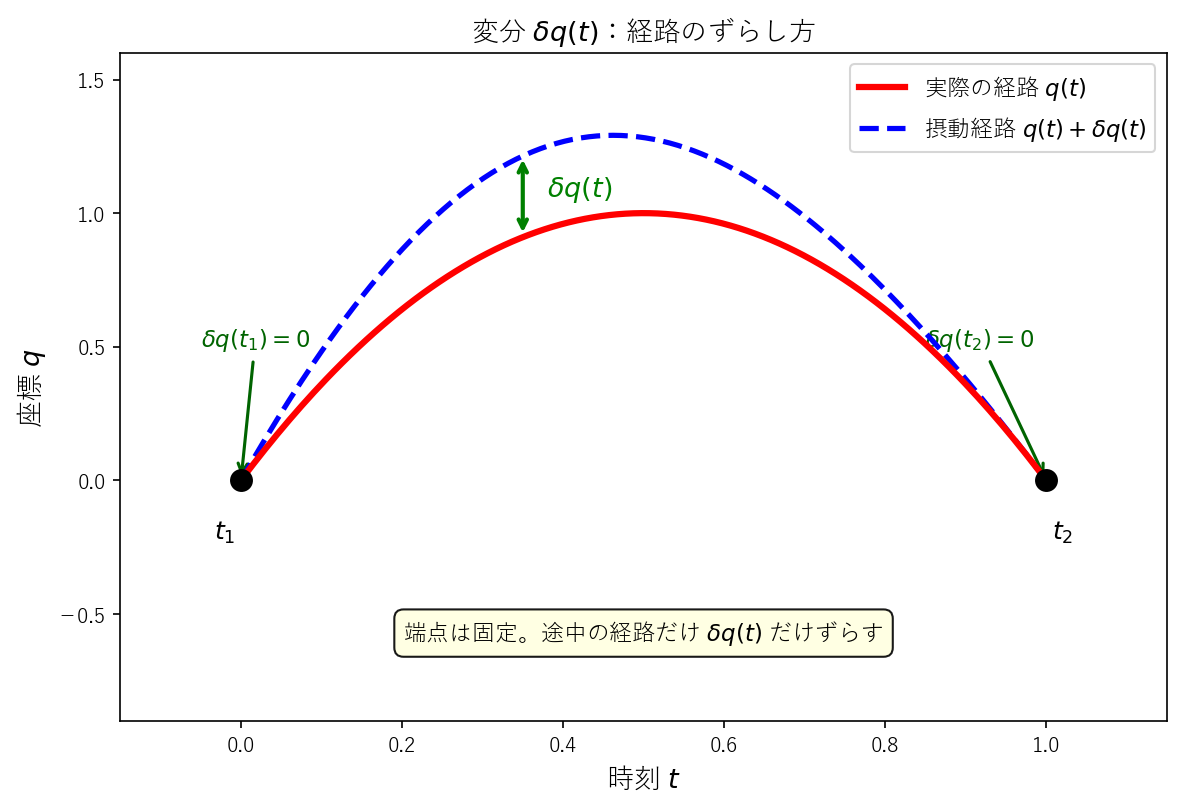
図 1.13: 変分 \(\delta q(t)\) のイメージ。赤の実線が実際の経路 \(q(t)\)、青の破線が摂動経路 \(q(t) + \delta q(t)\)。端点は固定(\(\delta q(t_1) = \delta q(t_2) = 0\))で、途中の経路だけが \(\delta q(t)\) だけずれている。
🔵 カイ: \(\delta q\) の \(\delta\)(デルタ)って、普通の微分の \(d\) とは違うんですか?
🟡 リナ: いい質問。\(dq\) は「同じ経路の上で、時刻を少しずらしたときの \(q\) の変化」。\(\delta q\) は「同じ時刻で、経路そのものを別の経路にずらしたときの変化」。つまり \(d\) は時間方向のずれ、\(\delta\) は経路空間の方向のずれ。
⚪ メイ: 時刻 \(t\) を固定したまま、「もし別の経路を通っていたら \(q\) はどれだけ違っていたか」が \(\delta q(t)\) ということね。
🟡 リナ: そう。そして端点は固定する——出発点と到着点は変えない:
🔵 カイ: 出発点と到着点は変えないけど、途中の経路だけ少し変えるんですね。
🟡 リナ: その通り。では、経路を \(q \to q + \delta q\) にずらしたとき、作用 \(S\) がどれだけ変わるかを計算しましょう。この変化量 \(\delta S\) を変分と呼ぶ。読み方は「デルタ・エス」よ。
🔵 カイ: \(\delta S\) はどうやって計算するんですか?
🟡 リナ: \(L(q, \dot{q}, t)\) は \(q\) と \(\dot{q}\) の 2 変数関数だったわね。経路を \(q \to q + \delta q\) にずらすと、速度も変わる。新しい経路の速度は \(\frac{d}{dt}(q + \delta q) = \dot{q} + \frac{d}{dt}(\delta q)\) だから、速度のずれは:
つまり「ずらした経路の速度」から「元の経路の速度」を引いたもの。微分の線形性(\((f+g)' = f' + g'\))を使っただけよ。
⚪ メイ: 「ずらし \(\delta q\) の時間変化率」が \(\delta\dot{q}\) ということね。ずらし方が時刻によって違えば、速度のずれも時刻によって変わる。
🟡 リナ: そう。では作用の変化量を計算する。ずらした後の作用は \(S[q + \delta q] = \int_{t_1}^{t_2} L(q + \delta q,\, \dot{q} + \delta\dot{q},\, t)\, dt\)。変化量は:
🟡 リナ: ここで、\(\delta q\) は「少しだけ」のずらしだから、高校で習った 1 変数の近似 \(f(x + \Delta x) \approx f(x) + f'(x)\,\Delta x\) の 2 変数版を使う。1 変数の場合は「接線で近似する」ということだったわね。2 変数の場合も同じ発想——1 変数では「接線で近似する」だったけれど、2 変数では「接平面で近似する」。2 変数関数 \(f(a, b)\) のグラフは 3 次元空間の曲面になる(\(a\) 軸、\(b\) 軸、\(f\) 軸の 3 つ)。その曲面にぴったり接する平らな面が接平面よ。2 変数関数 \(f(a, b)\) で \(a \to a + \Delta a\)、\(b \to b + \Delta b\) のとき:
これは \(\Delta a\), \(\Delta b\) の 1 次(1 乗)までの近似。\(\Delta a \cdot \Delta b\) や \((\Delta a)^2\) のような 2 次以上の項は、ずらしが十分小さいとき無視できる。たとえば \(\Delta a = 0.01\) なら \((\Delta a)^2 = 0.0001\) で、\(\Delta a\) 自体に比べて 100 分の 1——ずらしを小さくすればするほど 2 次以上の項は 1 次の項に比べて急速に小さくなるの。変分法では \(\delta q\) をどんどん小さくしていく極限を考えるから、2 次以上の項は 1 次の項に比べて無視でき、1 次の項だけが停留条件を決める。これは高校の微分で「\(f(x+\Delta x) \approx f(x) + f'(x)\Delta x\)」として極値条件 \(f'(x) = 0\) を求めたのと全く同じ発想よ。
🔵 カイ: 各変数の方向に「傾き × ずれ」を足すんですね。1 変数のときの \(f'(x)\,\Delta x\) を 2 方向に拡張した感じだ。
🟡 リナ: なぜ足し算でよいかを見てみましょう。まず \(b\) を固定して \(a\) だけ動かすと、1 変数の近似から \(f(a + \Delta a, b) \approx f(a, b) + \frac{\partial f}{\partial a}\Delta a\)。次にこの状態から \(b\) を動かすと \(f(a + \Delta a, b + \Delta b) \approx f(a + \Delta a, b) + \frac{\partial f}{\partial b}\Delta b\)。2 つを合わせると \(f(a, b) + \frac{\partial f}{\partial a}\Delta a + \frac{\partial f}{\partial b}\Delta b\) になる。(2 番目のステップで偏微分を評価する点が \((a, b)\) ではなく \((a + \Delta a, b)\) に少しずれるけれど、そのずれが結果に与える影響は \(\Delta a \cdot \Delta b\) という 2 次の項だけだから、1 次の近似では無視できる。)順番を逆にしても同じ結果になるわ。具体例で確認したい人は 問題 B-8. 偏微分の基礎計算 を見てね。
🔵 カイ: でも「2 次以上は無視できる」って、本当に無視していいんですか? 無限に小さいけどゼロじゃない、みたいなことにはならない?
🟡 リナ: いい質問。高校の微分で「極値の条件は \(f'(x) = 0\)」と習ったわよね。あれは「\(f(x + \Delta x) - f(x) \approx f'(x)\,\Delta x\) だから、1 次の変化がゼロなら、どちらにずらしても値が(1 次のレベルでは)変わらない」という意味だった。2 次の項 \(\frac{1}{2}f''(x)(\Delta x)^2\) は極大か極小かを判定するのに使うけれど、極値の位置を決めるのは 1 次の条件だけで十分。変分法でも全く同じ。\(\delta S\) を \(\delta q\) の次数で展開して、1 次の項だけを取り出す。「\(\delta q\) の 1 次の項がゼロ」が停留値の条件で、これだけで運動方程式が決まるの。2 次以上の項は \(\delta q\) が小さいとき 1 次の項に比べて \(\delta q\) 倍だけ小さいから、停留点の位置を決めるのには関係しない。高校の微分で \(\lim_{\Delta x \to 0} \frac{f(x+\Delta x) - f(x) - f'(x)\Delta x}{\Delta x} = 0\) と書いたのと同じ構造——分子の「残り」は \(\Delta x\) より速くゼロに近づくから、\(\Delta x\) で割ってもゼロになる。
🔵 カイ: あ、微分の定義と同じ発想か。「極値の位置を決めるのは 1 次の条件」——それを関数じゃなくて経路に対してやっているんですね。
🟡 リナ: そう。\(L\) に適用すると:
元の \(L\) を引くと:
⚪ メイ: 第 1 項は「\(q\) 方向の傾き × \(q\) のずれ」、第 2 項は「\(\dot{q}\) 方向の傾き × \(\dot{q}\) のずれ」。きれいに分かれるのね。
🟡 リナ: ここで問題が一つある。第 2 項に \(\delta\dot{q} = \frac{d}{dt}(\delta q)\) が入っている。最終的に「\(\delta q\) だけの式」にまとめたいのに、\(\delta q\) の時間微分が混ざっている。これを何とかしたい。
🔵 カイ: どうするんですか?
🟡 リナ: ここで使うのが部分積分。高校の数学 III で習った積の微分公式を覚えている?
🔵 カイ: \((fg)' = f'g + fg'\) ですよね。
🟡 リナ: これを移項すると \(fg' = (fg)' - f'g\)。両辺を \(t_1\) から \(t_2\) まで積分すると:
これが部分積分の公式。「\(g'\) の積分を \(g\) に押し付けて、代わりに \(f\) を微分する」操作よ。
🟡 リナ: 今の問題に当てはめる。部分積分の公式 \(\int f\,g'\,dt = [fg] - \int f'\,g\,dt\) で、\(f = \frac{\partial L}{\partial \dot{q}}\)、\(g = \delta q\)(したがって \(g' = \frac{d(\delta q)}{dt}\)、\(f' = \frac{d}{dt}\frac{\partial L}{\partial \dot{q}}\))と置くと:
🔵 カイ: 左辺の「\(\delta q\) の微分」が、右辺では「\(\delta q\) そのもの」に変わった! 代わりに \(\frac{\partial L}{\partial \dot{q}}\) の方が微分されている。
🟡 リナ: そう。微分を「相手に押し付けた」の。そして右辺の第 1 項——境界項を見て。\(\delta q(t_1) = 0\) かつ \(\delta q(t_2) = 0\)(端点固定)だから:
⚪ メイ: 端点を固定したおかげで、境界項がきれいに消えるのね。
🟡 リナ: これで第 2 項が整理できた。元の \(\delta S\) に代入すると:
🔵 カイ: あ、\(\delta q\) でくくれた! 被積分関数が「(何か)\(\times\,\delta q\)」の形になりましたね。でも、くくれたことで何が言えるんですか? なぜこの形にしたかったんですか?
🟡 リナ: いい質問。最小作用の原理は「\(\delta S = 0\)」を要求する——さっき言ったように、これは停留値の条件(1 次の変化がゼロ)よ。つまり:
しかも、これはどんなずらし方 \(\delta q(t)\) を選んでも成り立たなければならない。
🔵 カイ: 「どんな \(\delta q\) でも」って、なぜそれで括弧の中身がゼロだと言えるんですか?
🟡 リナ: 背理法で考えてみて。もし括弧の中身がある時刻 \(t^*\) でゼロでなかったとする——たとえば正だったとする。連続関数だから、\(t^*\) の近くでも正のまま。そこで、\(t^*\) の近くだけ正で他はゼロ、という \(\delta q\) を選んだら?
🔵 カイ: あ、正 × 正 = 正だから、その部分の積分は正になる。他はゼロだから全体もゼロにならない……!
🟡 リナ: そう。\(\delta S \neq 0\) になってしまい、「任意の \(\delta q\) で \(\delta S = 0\)」に矛盾する。だから括弧の中身は全ての時刻でゼロでなければならない:
🔵 カイ: ……でも先生、この式だけ見ても \(F = ma\) と同じだとは全然分からないんですけど。\(\frac{d}{dt}\frac{\partial L}{\partial \dot{q}}\) って何を表しているんですか?
🟡 リナ: これが Euler-Lagrange (オイラー=ラグランジュ) 方程式。見た目は \(F = ma\) と全然違うわよね。でも今から具体的な \(L\) を代入して同じ結果を再現するから、そうすれば各項の意味も見えてくるわ。
🟡 リナ: ちなみに、多自由度の場合(座標が \(q_1, q_2, \ldots, q_n\))は、各座標 \(q_i\) について独立に同じ形の方程式が成り立つ:
でもまずは 1 自由度で \(F = ma\) が出ることを確認しましょう。
✅ 理解度チェック: 変分 \(\delta q(t)\) と通常の微分 \(dq\) の違いは何でしょうか?
答え
\(dq\) は同じ経路上で時刻を少しずらしたときの \(q\) の変化。\(\delta q\) は同じ時刻で経路そのものを別の経路にずらしたときの変化。\(\delta q(t_1) = \delta q(t_2) = 0\)(端点固定)が課される。
✅ 理解度チェック: Euler-Lagrange 方程式の導出で部分積分を使う目的は何でしょうか?
答え
被積分関数に含まれる \(\delta\dot{q}\)(\(\delta q\) の時間微分)を消去し、全体を「(何か)\(\times \delta q\)」の形にまとめるため。部分積分で微分を \(\partial L/\partial \dot{q}\) 側に押し付け、端点固定条件で境界項を消す。
Newton の運動方程式の再現¶
🟡 リナ: では、この Euler-Lagrange 方程式が Newton の \(F = ma\) を再現することを確認しましょう。質量 \(m\) の粒子が 1 次元でポテンシャル \(V(x)\) の中を運動する場合:
🟡 リナ: Euler-Lagrange 方程式の各項を計算する。まず \(\dot{x}\) による偏微分:
これは運動量 \(p = m\dot{x}\) に他ならない。次に時間微分:
そして \(x\) による偏微分:
🔵 カイ: \(\frac{\partial L}{\partial \dot{x}}\) が運動量で、\(\frac{d}{dt}\frac{\partial L}{\partial \dot{x}}\) が質量×加速度——つまり Euler-Lagrange 方程式の左辺は「\(ma\)」の部分なんですね!
🟡 リナ: Euler-Lagrange 方程式に代入すると:
整理すると:
🔵 カイ: 右辺の \(-dV/dx\) って……あ、さっき重力で \(\mathbf{g} = -\nabla\Phi\) って習いましたよね。同じ構造で「力はポテンシャルの傾き」ということは、\(-dV/dx\) が力 \(F\) ってことですか?
🟡 リナ: その通り。\(F = -dV/dx\) は「力はポテンシャルエネルギーが減る方向に働く」という一般的な関係。重力の \(\mathbf{g} = -\nabla\Phi\) はその特殊な場合だったのよ。つまり \(m\ddot{x} = F\)——Newton の運動方程式 \(F = ma\) が、最小作用の原理から導出された。
⚪ メイ: 出発点は全く違う——「経路全体を眺めて作用を極値にする」——のに、たどり着く方程式は同じ \(F = ma\)。2 つの定式化が同じ物理を記述していることが確認できたわね。
✅ 理解度チェック: \(L = \frac{1}{2}m\dot{x}^2 - V(x)\) のとき、\(\partial L/\partial \dot{x}\) は物理的に何を表すでしょうか?
答え
運動量 \(p = m\dot{x}\)。Lagrangian を速度 \(\dot{x}\) で偏微分すると運動量が出てくる。一般に \(\partial L/\partial \dot{q}\) を一般化運動量(正準運動量とも呼ばれる)と定義する。今の場合は通常の運動量 \(m\dot{x}\) と一致する。
🔵 カイ: でも先生、さっき「始点と終点を固定する」って言いましたよね。終点を知っていないと使えないなら、未来を予測できないんじゃないですか?
🟡 リナ: いい疑問。実は「始点と終点を固定する」のは、Euler-Lagrange 方程式を導出するための数学的テクニックであって、「物理的に終点を知っていなければ使えない」という意味ではないの。
🔵 カイ: どういうことですか?
🟡 リナ: 最小作用の原理の役割は「正しい運動方程式を導出する装置」。そこから出てきた Euler-Lagrange 方程式は、境界条件に依存しない普遍的な微分方程式よ。実際に未来を予測するときは、この方程式に「初期位置 \(q(t_1)\) と初期速度 \(\dot{q}(t_1)\)」を与えて解く——これは \(F = ma\) に初期条件を与えて解くのと全く同じ。
⚪ メイ: つまり、最小作用の原理は「正しい方程式を見つける原理」で、予測を実行するのはそこから出てきた Euler-Lagrange 方程式の方ということね。「始点と終点を固定」は方程式を導くときの足場であって、使い終わったら外してよい。
重力場中の自由落下の例¶
🟡 リナ: もう一つ具体例をやっておきましょう。鉛直上向きを \(y\) 軸の正方向にとった自由落下。高さ \(y\) でのポテンシャルエネルギーは \(V = mgy\) だから:
Euler-Lagrange 方程式:
Euler-Lagrange 方程式 \(\frac{d}{dt}\frac{\partial L}{\partial \dot{y}} - \frac{\partial L}{\partial y} = 0\) に代入すると:
⚪ メイ: 等加速度運動 \(\ddot{y} = -g\) が出てきた。Galileo の落体の法則そのものね。
なぜ最小作用の原理が重要か¶
🔵 カイ: でも先生、同じ答えが出るなら、わざわざ別の定式化をする意味は?
🟡 リナ: 3 つの理由がある。
🟡 リナ: 第一に、対称性が見えやすい。Lagrangian が時間に依存しなければエネルギーが保存する、空間に依存しなければ運動量が保存する——こういう「対称性と保存量の関係」が自動的に出てくる(Noether の定理、第 15 章 Killing ベクトルと保存量の関係 で再登場する)。
🔵 カイ: 「Lagrangian が時間に依存しない」って、具体的にはどういうこと?
🟡 リナ: たとえば自由落下の \(L = \frac{1}{2}m\dot{y}^2 - mgy\) を見て。\(g\) は定数だから、この \(L\) の式に時刻 \(t\) が直接現れていない——「いつ実験しても同じ形」よね。もちろん \(y\) や \(\dot{y}\) は時間とともに変わるけれど、それは「経路に沿った変化」であって、\(L\) の関数形そのものは \(t\) に依存していない。こういうとき \(\partial L/\partial t = 0\) と書く。これは「\(L(q, \dot{q}, t)\) の 3 つ目の入力スロット \(t\) で微分してもゼロ」という意味——さっき \(q\) と \(\dot{q}\) を独立変数として扱ったのと同じ発想で、\(q\) と \(\dot{q}\) を固定したまま \(t\) で微分する。\(L\) の式に \(t\) が陽に入っていないのだから当然ゼロよね。「時間並進の対称性がある」と言うの。この場合に保存するエネルギーは \(T + V = \frac{1}{2}m\dot{y}^2 + mgy\)——Lagrangian は \(T - V\) だけど、保存量として出てくるのは \(T + V\)(全エネルギー)よ。落下中に速度が増えても、その分だけ高さが下がるから、和は一定。なぜ \(\partial L/\partial t = 0\) からこれが導けるかは 第 15 章 Killing ベクトルと保存量 で証明するけれど、今は「そういう強力な定理がある」と覚えておいて。
🔵 カイ: 対称性って何ですか? よく聞く言葉だけど、物理学ではどういう意味?
🟡 リナ: 一言で言えば、「ある操作をしても物理法則(Lagrangian の形)が変わらない」こと。まとめておくわね。
対称性とは — 「変えても変わらない」こと
物理学で「対称性がある」とは、ある操作をしても物理法則が変わらないことを言う。
操作 対称性の名前 導かれる保存量 実験する場所をずらす 空間並進の対称性 運動量 実験する時刻をずらす 時間並進の対称性 エネルギー 実験装置を回転させる 回転の対称性 角運動量 「対称性が一つあるたびに、保存量が一つ出てくる」——これが Noether (ネーター) の定理。第 15 章 Killing ベクトルと保存量の関係 として再登場し、「場の量子論」編 第 3 章 一般的な証明 を扱う。
注意: 対称性は「自然が必ず持っていなければならないもの」ではない。「この対称性があると仮定したら、実験と合う結果が出た」という形で検証される仮説の一部。
🔵 カイ: なるほど。じゃあさっきの自由落下の例で言うと、「東京で実験しても大阪で実験しても同じ \(\ddot{y} = -g\) になる」のが空間並進の対称性……ってことですか? でも表には「運動量が保存する」って書いてあるけど、自由落下で運動量って保存してましたっけ? 落ちていくとき速度は変わりますよね?
🟡 リナ: いい疑問ね。少し整理させて。カイの言う「東京でも大阪でも同じ法則」は正しい直感で、それは確かに対称性の一種よ。ただ Noether の定理が言う「対称性 → 保存量」はもう少し具体的なの。ポイントは「Lagrangian がある座標に依存しないなら、その方向の運動量が保存する」ということ。1 次元の自由落下 \(L = \frac{1}{2}m\dot{y}^2 - mgy\) だと \(y\) が \(L\) に入っているから \(y\) 方向の運動量は保存しない——カイの直感通りね。でも、ボールを斜めに投げる場合を考えてみて。水平方向 \(x\) と鉛直方向 \(y\) の両方を含めると \(L = \frac{1}{2}m(\dot{x}^2 + \dot{y}^2) - mgy\) と書ける(運動エネルギーに \(x\) 方向の寄与 \(\frac{1}{2}m\dot{x}^2\) を加えただけ)。この式を見ると、\(x\)(水平方向)が \(L\) に陽に現れていないわよね。つまり \(x \to x + \text{定数}\) としても \(L\) が変わらない——これが「水平方向の空間並進対称性」。Noether の定理によれば、この対称性に対応して水平方向の運動量 \(m\dot{x}\) が保存する。投げたボールの水平速度が一定なのはまさにこれよ。一方、鉛直方向には \(mgy\) の項があるから \(y\) 方向の並進対称性はなく、鉛直方向の運動量は保存しない(重力で加速するから)。
🔵 カイ: あ、なるほど。「場所を変えても法則が同じ」という大きな話と、「Lagrangian に \(x\) が入っていないから \(x\) 方向の運動量が保存する」という具体的な話は、レベルが違うんですね。後者の方がずっと具体的で、どの方向に保存量があるかまで教えてくれる。
🟡 リナ: その通り。Noether の定理は「どの対称性がどの保存量に対応するか」を一対一で結びつけてくれる。だから強力なの。
🟡 リナ: 第二に、座標系を選ばない。\(F = ma\) を成分で書き下すと、極座標では遠心力やコリオリ力のような見かけの項が現れて式の形が変わってしまう。でも Euler-Lagrange 方程式は \(\frac{d}{dt}\frac{\partial L}{\partial \dot{q}_i} - \frac{\partial L}{\partial q_i} = 0\) という同じ形のまま、どんな座標でも使える。第 2 章 以降で学ぶ一般相対論では、座標系によらない記述が本質的に重要になる。
⚪ メイ: 座標系を変えても方程式の「形」が変わらないのは、この先の一般相対論で座標の自由度を扱うときに本質的に効いてくるわけね。
🟡 リナ: 第三に、場の理論への拡張が自然。粒子の Lagrangian \(L(q, \dot{q})\) を「場の Lagrangian 密度」と呼ばれる量に拡張すれば、場の運動方程式が同じ枠組みで導ける。記号や詳細は Appendix C 場の理論 で扱うけれど、重要なのは「Lagrangian を書いて作用を極値にする」という手順が全く同じだということ。第 14 章 Einstein方程式 も、第 24 章 Einstein-Hilbert 作用の変分 も、全てこの原理の上に立っている。
🔵 カイ: じゃあ、電磁気学とか一般相対論でも、Lagrangian を書いて同じ手順で方程式を出すんですか? 全然違う物理なのに同じ方法が使えるって……でも、なぜ自然はいつも「作用を極値にする」という形で記述できるんですか? それ自体が不思議じゃないですか?
🟡 リナ: 深い問いね。正直に言えば、「なぜ最小作用の原理が成り立つのか」に対する究極的な答えは分かっていない。ただ、物理学の全ての基本的なモデルは、Lagrangian を書き下して作用を極値にする、という形で定式化できる——そしてその結果が実験と合う。\(F = ma\) は Newton 力学専用だけど、最小作用の原理は「共通言語」として全ての分野で使える。これがこの先ずっと使う道具よ。
✅ 理解度チェック: 最小作用の原理が \(F = ma\) より優れている理由として本文で挙げられた 3 つのうち、1 つを述べてください。
答え
(以下のいずれか 1 つ)(1) 対称性と保存量の関係が自動的に見える。(2) 座標系を選ばない。(3) 場の理論への拡張が自然にできる。
✅ 理解度チェック: Noether の定理によれば、Lagrangian が時間に陽に依存しない(\(\partial L/\partial t = 0\))とき、何が保存されるでしょうか?
答え
エネルギーが保存される。これは「時間並進の対称性」(いつ実験しても物理法則が同じ)に対応する保存量である。
Lagrangian はどうやって見つけるのか¶
🔵 カイ: でも先生、Lagrangian ってどうやって見つけるんですか? 誰かが「\(L = T - V\) にしよう」って決めたんですか?
🟡 リナ: いい質問。Lagrangian を見つける方法は、大きく 2 つある。第一に、対称性から制約する。「この系はこういう対称性を持つはずだ」と要請すると、Lagrangian の形がかなり絞られる。第二に、実験と照らし合わせる。候補の Lagrangian から運動方程式を導いて、実験結果と比較する。合わなければ Lagrangian を修正する。
⚪ メイ: つまり、Lagrangian 自体が「仮説」なのね。
🟡 リナ: その通り。物理学者の仕事は「正しい Lagrangian を見つけること」と言っても過言ではない。Newton 力学では \(L = T - V\)、電磁気学では別の形、一般相対論ではスカラー曲率 \(R\) を使った Einstein-Hilbert 作用。形は違うけど、「Lagrangian を書いて作用を極値にする」という枠組みは全て共通。
✅ 理解度チェック: 作用 \(S\) はどのように定義されるでしょうか? Lagrangian \(L\) とは何でしょうか?
答え
\(S = \int_{t_1}^{t_2} L\, dt\)。Lagrangian は \(L = T - V\)(運動エネルギーとポテンシャルエネルギーの差)。
✅ 理解度チェック: Euler-Lagrange 方程式を書き、\(L = \frac{1}{2}m\dot{x}^2 - V(x)\) から Newton の運動方程式が出ることを確認してみましょう。
答え
Euler-Lagrange 方程式:\(\frac{d}{dt}\frac{\partial L}{\partial \dot{q}} - \frac{\partial L}{\partial q} = 0\)。\(L = \frac{1}{2}m\dot{x}^2 - V(x)\) を代入すると \(m\ddot{x} = -dV/dx\)、すなわち \(F = ma\)。
1.8 この章のまとめ¶
🟡 リナ: 今日の内容を整理しておくわ。
- Newton の万有引力 \(F = Gm_1m_2/r^2\) を、重力場 \(\mathbf{g} = -\nabla\Phi\) と重力ポテンシャル \(\Phi\) を使って「場の理論」として書き直した
- ポテンシャルを決める場の方程式が Poisson 方程式 \(\nabla^2\Phi = 4\pi G\rho\)
- 成功例:海王星の発見——Newton モデルの定量的予測が見事に確認された
- 限界①:水星の近日点移動——Newton モデルの予測が観測と 100 年あたり 43 秒角ずれる
- 限界②:Poisson 方程式に時間微分がなく、重力の変化が瞬時に伝わる——特殊相対論と矛盾する
- 最小作用の原理——Lagrangian \(L = T - V\) と作用 \(S = \int L\,dt\) を定義し、作用の停留条件 \(\delta S = 0\)(「最小」とは限らないが歴史的にこう呼ぶ)から Euler-Lagrange 方程式 \(\frac{d}{dt}\frac{\partial L}{\partial \dot{q}} - \frac{\partial L}{\partial q} = 0\) を導出。Newton の \(F = ma\) を再現した。この枠組みは 第 8 章 測地線方程式、第 14 章 Einstein方程式、Appendix C 場の理論 で繰り返し使う
🔵 カイ: Newton のモデルは「間違い」じゃなくて、「より正確なモデルの近似」なんですね。
🟡 リナ: その通り。プロローグで言った「モデルは仮説」の具体例を、今日初めて見たことになるわ。
次章予告¶
第 2 章 旅の設計図 — テンソルと Einstein 方程式の全体像」では、Newton モデルの限界を超えるために必要な全体設計図を広げる。物理のモデルを座標系に依存しない形で書くためのテンソルという道具を導入し、Einstein の重力モデルが「粒子の運動を決める測地線方程式」と「時空の形を決める Einstein 方程式」の二本柱で構成されることを俯瞰する。具体的な数式の導出は第 3 章以降で一歩ずつ進めるが、まずは「どこに向かうのか」を掴む。
参考文献¶
- Hartle, J. B. (2003). Gravity: An Introduction to Einstein's General Relativity. Addison-Wesley. Ch. 1, Ch. 3.
- Tong, D. (2019). General Relativity. University of Cambridge Part II Mathematical Tripos. Ch. 1. http://www.damtp.cam.ac.uk/user/tong/gr.html
- 石井俊全 (2013).『一般相対性理論を一歩一歩数式で理解する』ベレ出版. 第 2 章「物理の準備」.
このページについてフィードバック
分からなかった箇所、誤りの指摘、改善提案などをお寄せください。