第 6 章 曲線座標と計量テンソル¶
前回までのあらすじ: 第 5 章では、自由落下するエレベーターと加速するロケットの思考実験から、等価原理(アインシュタインの等価原理)を導いた。加速と重力は局所的に区別できない——つまり重力は「力」ではなく「時空そのものの性質」かもしれない。そうだとすれば、「曲がった時空」を数学的に記述する道具が必要になる。
この章のゴール
- 曲線座標(極座標・球座標)を具体例として、座標変換の仕組み(Jacobi 行列)と計量テンソル \(g_{\mu\nu}\) の意味を理解する
- 「ものさしが場所によって変わる」とはどういうことかを数式で表現できるようになり、さらに「座標の曲がり」と「空間の曲がり」が別の概念であることを区別できるようになること
- これは次章以降で曲がった時空(Schwarzschild 計量など)を扱うための必須の土台となる
この章の単位系: 特殊相対論との対応を明確にするため、\(c\) を明示する SI 単位系を使う。4 次元時空の座標は \((t, x, y, z)\)(\(x^0 = t\))とし、前章までの \((ct, x, y, z)\) とは異なる。変換規則は Appendix D.6 を参照。
6.1 なぜ直交座標だけでは足りないのか¶
🟡 リナ: 前章で「重力は時空の曲がりである」というアイデアに到達したわね。でも「曲がった時空」を記述するには、まず「曲がっていない空間」で座標の扱いに慣れておく必要がある。
🔵 カイ: え、曲がっていない空間なら、普通の \(x, y, z\) で十分じゃないですか?
🟡 リナ: 確かに、平坦な空間なら直交座標で全てが書ける。でも、問題の対称性に合わせて別の座標を使いたい場面はたくさんあるの。たとえば、円運動の問題を \(x, y\) で記述すると式が複雑になるけれど、極座標 \((r, \theta)\) なら見通しが良くなるでしょう?
🟡 リナ: それに、もっと本質的な理由がある。曲がった時空——たとえば球面——には、全体を覆う直交座標がそもそも存在しないの。地球の表面を考えてみて。平面の \(x, y\) 座標で地球全体を歪みなく覆うことは不可能よね。だから曲線座標の扱いは、一般相対論に進むための必須の道具なの。
⚪ メイ: なるほど、球面を平面の座標で覆えないのは地図帳を見ても分かるわね。どんな地図投影法でも必ず歪みが出る。
🔵 カイ: なるほど……まず平坦な空間で「座標を変える」練習をして、それから本当に曲がった空間に進むわけですね。
🟡 リナ: その通り。この章では、平坦な空間に極座標や球座標を入れることで、座標が曲がっていても空間自体は曲がっていないという状況をまず理解する。そのうえで「距離の測り方」を数式で定式化するの。
✅ 理解度チェック: 曲がった空間(たとえば球面)に、全体を覆う直交座標を導入できるでしょうか?
答え
できない。球面のような曲がった空間には、全体を歪みなく覆う直交座標が存在しない。これが曲線座標の扱いを学ぶ本質的な理由の一つ。
✅ 理解度チェック: 「座標の曲がり」と「空間の曲がり」は同じ概念でしょうか?
答え
別の概念。平坦な空間でも曲線座標(極座標など)を使えば座標線は曲がるが、空間自体は曲がっていない。両者を混同しないことが重要。
6.2 曲線座標の具体例¶
極座標(2 次元)¶
🟡 リナ: 最も身近な曲線座標は、2 次元平面の極座標(polar coordinates)ね。平面上の点 \(P\) を、原点からの距離 \(r\) と、\(x\) 軸正方向からの角度 \(\theta\) で指定する。図 6.1「直交座標と極座標の比較」 を見てみて。
直交座標 \((x, y)\) との関係は:
逆に:
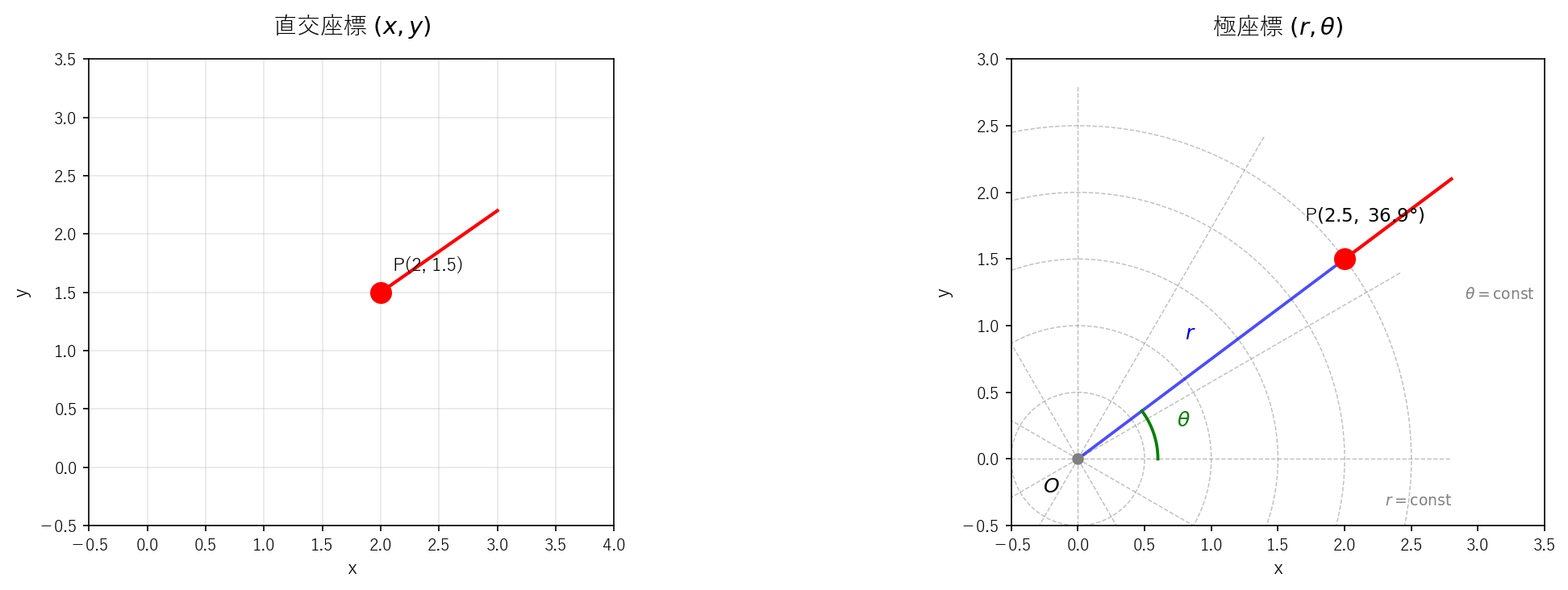
図 6.1: 直交座標と極座標の比較。同じ点 P を直交座標(左)と極座標(右)で表す。
🔵 カイ: これは高校でもやりました。
🟡 リナ: じゃあ質問。極座標の座標線——つまり「\(r\) を固定して \(\theta\) だけ変える」線と「\(\theta\) を固定して \(r\) だけ変える」線——はどんな形になる?
🔵 カイ: \(r\) 一定の線は原点を中心とする円で、\(\theta\) 一定の線は原点から伸びる直線ですね。
🟡 リナ: そう。座標線が直線でないから「曲線座標」と呼ぶの。でも大事なのは、座標線が曲がっているからといって、空間自体が曲がっているわけではないということ。紙の上に極座標を描いても、紙は平坦なままでしょう?
⚪ メイ: §1 で言っていた「座標の曲がり」と「空間の曲がり」の区別ね。極座標はまさにその具体例ということか。
球座標(3 次元)¶
🟡 リナ: 3 次元に拡張しよう。空間中の点 \(P\) を、原点からの距離 \(r\)、\(z\) 軸からの角度 \(\theta\)(シータ、天頂角)、\(xy\) 平面上での角度 \(\varphi\)(ファイ、偏角)で指定するのが球座標(spherical coordinates)よ。図 6.2「球座標 \((r, \theta, \varphi)\) の定義」 を見てみて。
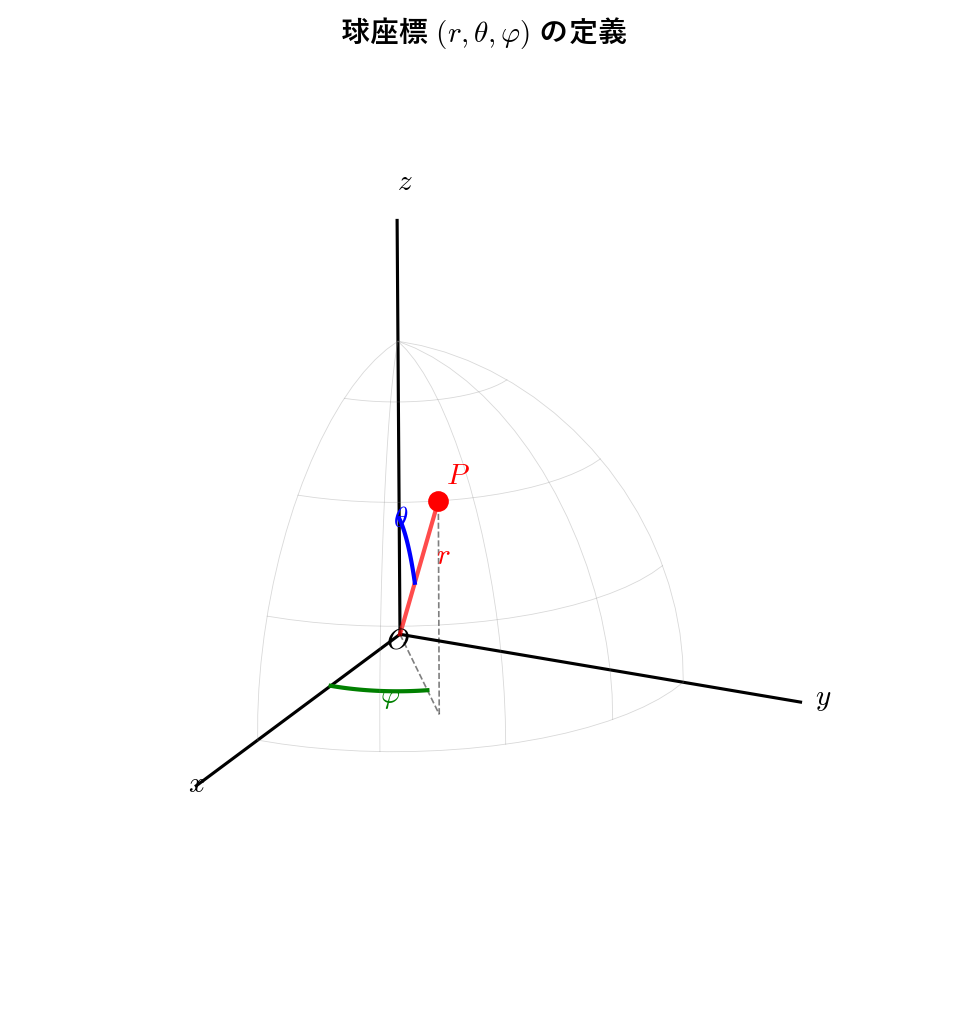
図 6.2: 球座標 \((r, \theta, \varphi)\) の定義。原点 O から点 P までの距離が \(r\)、\(z\) 軸からの角度が天頂角 \(\theta\)、\(xy\) 平面への射影と \(x\) 軸のなす角が偏角 \(\varphi\)。
直交座標との関係は:
🔵 カイ: 地球の緯度・経度みたいなものですね。
🟡 リナ: そう。ただし天頂角 \(\theta\) は北極から測るので、地理の「緯度」とは \(90°\) ずれていることに注意してね。
6.3 座標変換と Jacobi 行列¶
🟡 リナ: さて、ここからが本題。座標を変えたとき、「微小な変位」はどう変換されるか? これを系統的に扱う道具が Jacobi (ヤコビ) 行列なの。
微小変位の変換¶
🟡 リナ: 直交座標 \((x, y)\) の微小変位 \((dx, dy)\) と、極座標 \((r, \theta)\) の微小変位 \((dr, d\theta)\) の関係を求めてみましょう。\(x = r\cos\theta\) は \(r\) と \(\theta\) の 2 変数の関数よね。\(r\) と \(\theta\) が同時に少しずつ変わったとき、\(x\) はどれだけ変わるか? 1 変数の関数 \(f(x)\) なら \(df = f'(x)\,dx\) と書けたわね。2 変数の場合も同じ発想で、変化が十分小さければ、「\(r\) だけ変えたときの変化」と「\(\theta\) だけ変えたときの変化」を独立に計算して足し合わせることができる。この「各変数の寄与を足し合わせて全体の変化を表す」操作を全微分(total differential)と呼ぶの:
ここで \(\dfrac{\partial x}{\partial r}\) は「\(\theta\) を固定して \(r\) だけ変えたときの \(x\) の変化率」(偏微分)、\(\dfrac{\partial x}{\partial \theta}\) は「\(r\) を固定して \(\theta\) だけ変えたときの \(x\) の変化率」よ。1 変数の微分 \(df = f'(x)\,dx\) の自然な拡張ね。
🔵 カイ: あ、「それぞれの方向の寄与を足す」ってことは、変化が十分小さいから重ね合わせが成り立つんですね。
🟡 リナ: その通り。実際に計算すると:
同様に \(y = r\sin\theta\) から:
行列形式でまとめると:
⚪ メイ: つまり、この行列 1 つで「極座標の微小変位から直交座標の微小変位への変換」が全部書けるのね。
🟡 リナ: この右辺の \(2 \times 2\) 行列を Jacobi 行列と呼ぶの。一般に、座標に番号をつけて \((x^1, x^2)\)、\((u^1, u^2)\) のように書くことがあるわ。今の例では \((x^1, x^2) = (x, y)\) が直交座標、\((u^1, u^2) = (r, \theta)\) が極座標に対応しているの。注意してほしいのは、この上付きの数字はべき乗ではなく座標の番号(添字)だということ。\(x^2\) は「\(x\) の 2 乗」ではなく「2 番目の座標」(つまり \(y\))という意味よ。紛らわしいけれど、テンソル計算ではこの記法が標準なの。
この記法を使うと、座標 \((x^1, x^2)\) を座標 \((u^1, u^2)\) の関数として書いたとき——つまり「\(u\) 座標を与えたら \(x\) 座標が決まる」という関係を使って——
を成分とする行列が Jacobi 行列よ。
🔵 カイ: \(x^2\) が「\(x\) の 2 乗」じゃなくて「2 番目の座標」……最初は混乱しそうです。べき乗と区別がつかなくなりませんか?
🟡 リナ: 文脈で判断するしかないの。でも実用上は、座標に番号をつけるときは必ず上付きにするから、たとえば極座標なら \(u^1 = r\)、\(u^2 = \theta\) と書く。「\(u^2 = \theta\)」を見て「\(u\) の 2 乗がシータ?」とはならないでしょう? べき乗が必要なときは \((u^1)^2\) のように括弧をつけるわ。
⚪ メイ: つまり、各成分が「新しい座標を少し動かしたとき、古い座標がどれだけ動くか」を表しているのね。
🔵 カイ: この行列の成分が定数じゃないところがポイントですね。\(r\) や \(\theta\) に依存している。
🟡 リナ: いい着眼点ね。Lorentz 変換の行列は定数だったけれど、一般の座標変換では変換行列が場所ごとに異なる。これが曲線座標の本質的な新しさなの。図 6.3「同じ 2 次元平面を 2 つの座標系で覆う」 を見ると、直交座標のメッシュが等間隔なのに対して、極座標のメッシュは場所によって間隔が変わっているのが分かるでしょう?
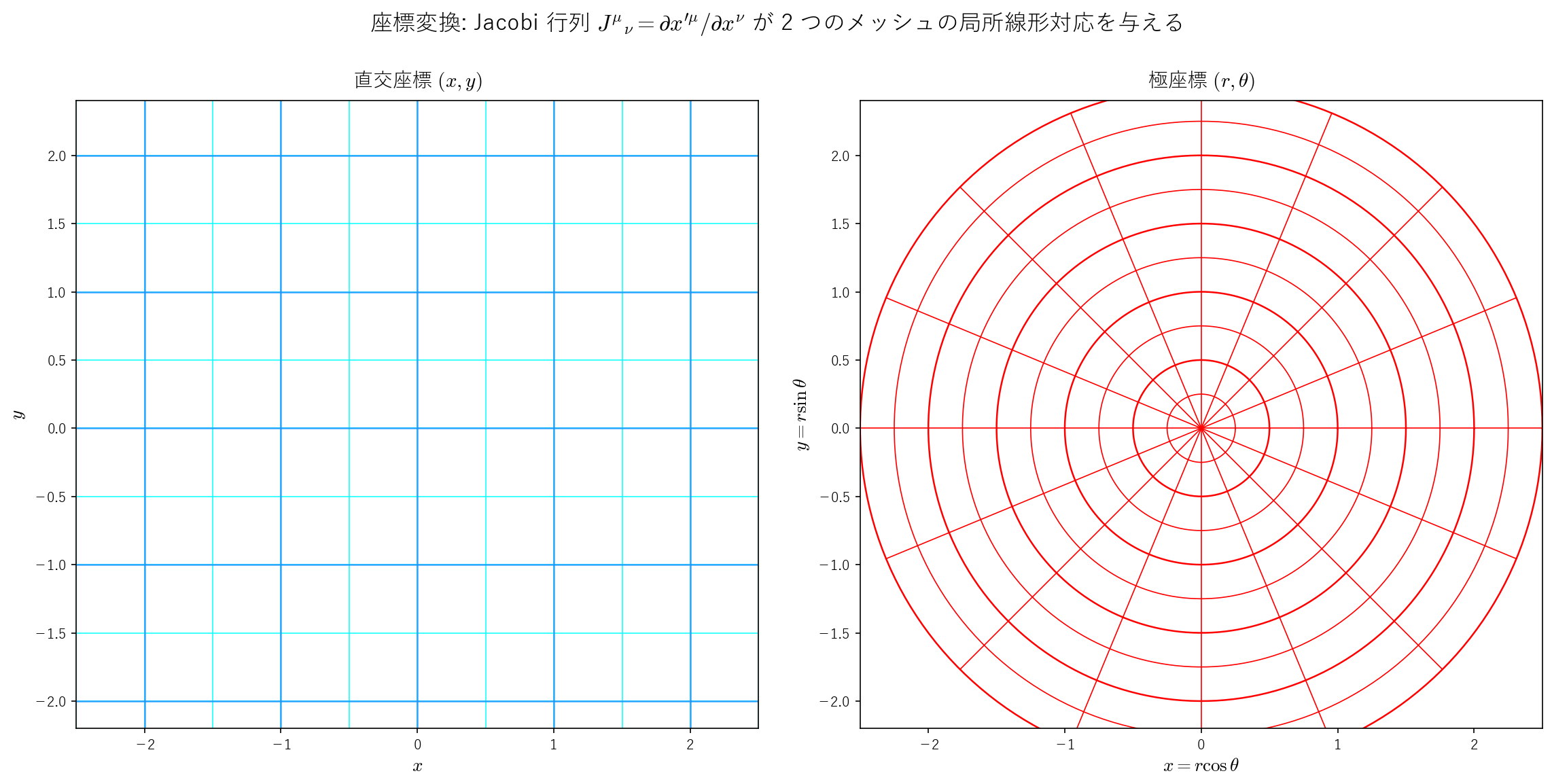
図 6.3: 同じ 2 次元平面を 2 つの座標系で覆う。直交座標(左)のメッシュは等間隔で平行・直交、極座標(右)は原点を中心に放射状に配置される。同じ微小変位を (a) \((dx, dy)\) で測るか (b) \((dr, d\theta)\) で測るかを結ぶ線形変換が Jacobi 行列 \(J^i{}_j = \partial x^i/\partial u^j\)。この行列が場所ごとに異なるのが曲線座標の本質的な特徴。
✅ 理解度チェック: Lorentz 変換の変換行列と、一般の曲線座標変換の Jacobi 行列の決定的な違いは何でしょうか?
答え
Lorentz 変換の行列は定数(場所によらない)だが、一般の曲線座標変換の Jacobi 行列は座標値(場所)に依存する。これが曲線座標の本質的な新しさである。
逆変換と Jacobi 行列の逆行列¶
🟡 リナ: 逆方向の変換も考えよう。\(r = \sqrt{x^2 + y^2}\)、\(\theta = \arctan(y/x)\) を偏微分すると:
(ヒント:\(r = \sqrt{x^2 + y^2} = (x^2 + y^2)^{1/2}\) だから、合成関数の微分で \(\partial r/\partial x = \frac{1}{2}(x^2+y^2)^{-1/2}\cdot 2x = x/\sqrt{x^2+y^2}\)。\(\partial r/\partial y\) も同様に \(y/\sqrt{x^2+y^2}\)。\(\theta\) については、\(x > 0\) の領域で \(\theta = \arctan(y/x)\) とし、逆三角関数の微分公式 \((\arctan u)' = 1/(1 + u^2)\)(導出はすぐ下の折りたたみ補足を開いて確認してね)と合成関数の微分を適用する。\(\partial\theta/\partial x\):\(u = y/x\) とおくと \(\partial u/\partial x = -y/x^2\) だから \(\partial\theta/\partial x = \frac{1}{1+(y/x)^2}\cdot(-y/x^2) = -y/(x^2+y^2)\)。\(\partial\theta/\partial y\):同じく \(u = y/x\) で \(\partial u/\partial y = 1/x\) だから \(\partial\theta/\partial y = \frac{1}{1+(y/x)^2}\cdot(1/x) = x/(x^2+y^2)\)。)
::: {.callout-note collapse="true" title="補足:\((\arctan u)' = 1/(1+u^2)\) の導出"} \(\theta = \arctan u\) とおくと \(\tan\theta = u\)。両辺を \(u\) で微分すると、左辺は合成関数の微分で \(\frac{1}{\cos^2\theta}\cdot\frac{d\theta}{du}\)、右辺は 1。よって \(\frac{d\theta}{du} = \cos^2\theta\)。ここで \(1 + \tan^2\theta = 1/\cos^2\theta\)(\(\sin^2\theta + \cos^2\theta = 1\) の両辺を \(\cos^2\theta\) で割れば得られる)だから \(\cos^2\theta = 1/(1 + u^2)\)。以上より \((\arctan u)' = 1/(1 + u^2)\)。 :::
行列形式で:
🟡 リナ: この 2 つの Jacobi 行列を掛け合わせてみましょう。逆行列の関係になっているはずよ。メイ、計算してみてくれる?
⚪ メイ: やってみます。
\((1,1)\) 成分:\(\cos\theta \cdot \cos\theta + (-r\sin\theta) \cdot \left(-\dfrac{\sin\theta}{r}\right) = \cos^2\theta + \sin^2\theta = 1\)
\((1,2)\) 成分:\(\cos\theta\sin\theta - r\sin\theta \cdot \dfrac{\cos\theta}{r} = 0\)
\((2,1)\) 成分:\(\sin\theta \cdot \cos\theta + r\cos\theta \cdot \left(-\dfrac{\sin\theta}{r}\right) = \sin\theta\cos\theta - \sin\theta\cos\theta = 0\)
\((2,2)\) 成分:\(\sin^2\theta + r\cos\theta \cdot \dfrac{\cos\theta}{r} = 1\)
結果は単位行列。つまり2 つの Jacobi 行列は互いに逆行列ね。
🟡 リナ: その通り。これは一般的に成り立つ定理なの。連鎖律(chain rule)を使えば一行で証明できる。ここで Einstein の縮約規約を改めて確認しておきましょう——第 2 章 で紹介した「同じ式の中で上と下に同じ添字が現れたら、その添字について和をとる」という約束ね。たとえば \(A^j B_j\) と書いたら \(\sum_j A^j B_j = A^1 B_1 + A^2 B_2 + \cdots\) の意味。2 次元なら \(A^j B_j = A^1 B_1 + A^2 B_2\)。いちいち \(\sum\) を書かなくて済むから、テンソル計算では標準的に使われるの。この章では偏微分の添字にも適用するから、ルールをしっかり思い出しておいてね。
🔵 カイ: 「上と下に同じ添字」って、どうやって上下を判断するんですか? さっきの Jacobi 行列 \(J^i{}_j\) みたいに明示的に上下に書いてあればわかりますけど、偏微分のときは?
🟡 リナ: いい質問。偏微分の場合は次のルールよ:分子にある添字は「上」、分母にある添字は「下」と数える。たとえば \(\dfrac{\partial x^i}{\partial u^j}\) なら、\(i\) は分子にあるから「上」、\(j\) は分母にあるから「下」。直感的には、\(dx^i\) は座標の変化量で上付き添字を持つもの、\(\partial u^j\) は分母にあるから「割る側」で下付きになる、と思っておけばいいわ。なぜこの区別が本質的なのかは次章で「反変・共変」を体系的に学ぶときに分かるから、今は「分子は上、分母は下」というルールだけ覚えておけば大丈夫。
🔵 カイ: なるほど、\(\dfrac{\partial x^i}{\partial u^j}\) なら \(i\) が上で \(j\) が下……そして \(\dfrac{\partial u^j}{\partial x^k}\) では \(j\) が分子にあるから上。つまり \(j\) が下と上の両方に出ているから、\(j\) について和をとる——ということですね。
🟡 リナ: その通り。この規約を使うと、連鎖律は次のように書ける:
左辺を見てね。最初の因子 \(\dfrac{\partial x^i}{\partial u^j}\) では \(j\) は下(分母)、次の因子 \(\dfrac{\partial u^j}{\partial x^k}\) では \(j\) は上(分子)——つまり \(j\) が上と下の両方に現れているから、\(j\) について和をとる。展開すれば \(\sum_{j} \dfrac{\partial x^i}{\partial u^j}\dfrac{\partial u^j}{\partial x^k}\) という意味よ。
⚪ メイ: 添字の上下を追うだけで「どこに和が入るか」が自動的に決まるのね。慣れれば \(\sum\) を書くより楽そう。
🟡 リナ: 2 次元で具体的に書くと、たとえば \(i = 1\), \(k = 1\) のとき:
これは「\(x\) を \((r, \theta)\) 経由で \(x\) 自身に戻す」操作が恒等変換になる、ということね。右辺に出てきた \(\delta^i_k\) は Kronecker (クロネッカー) のデルタと呼ばれる記号で、\(i = k\) なら 1、\(i \neq k\) なら 0 という定義。つまり「\(x^i\) を \(x^k\) で微分したら、同じ座標どうし(\(i = k\))なら 1、違う座標(\(i \neq k\))なら 0」という当たり前のことを記号にしたものよ。具体的に言えば、\(x^1 = x\), \(x^2 = y\) のとき、\(\partial x / \partial x = 1\)、\(\partial x / \partial y = 0\)——\(x\) と \(y\) は独立な座標だから、一方を変えても他方は変わらない。2 次元なら \(\delta^1_1 = 1\), \(\delta^1_2 = 0\), \(\delta^2_1 = 0\), \(\delta^2_2 = 1\) だから、行列で書けば単位行列 \(\begin{pmatrix}1 & 0\\0 & 1\end{pmatrix}\) の成分そのものね。添字が上下に分かれているのは、左辺の添字の位置に合わせているだけ。
🔵 カイ: つまり「行きの変換行列」と「帰りの変換行列」は常に逆行列の関係にあるんですね。
✅ 理解度チェック: 座標変換 \(x^i(u^j)\) の Jacobi 行列と、逆変換 \(u^j(x^i)\) の Jacobi 行列の間にはどのような関係があるでしょうか?
答え
互いに逆行列の関係にある。連鎖律から \(\frac{\partial x^i}{\partial u^j}\frac{\partial u^j}{\partial x^k} = \delta^i_k\) が成り立つため。
✅ 理解度チェック: Jacobi 行列とは何でしょうか?
答え
座標変換 \(x^i = x^i(u^1, u^2, \ldots)\) の偏微分 \(J^i{}_j = \partial x^i / \partial u^j\) を成分とする行列。微小変位がどう変換されるかを記述する。一般の座標変換では、Lorentz 変換と違い成分が場所ごとに異なる。
📝 練習問題:
- Jacobi 行列・逆行列 → 問題 B-1. 2 次元極座標のヤコビアン, 問題 B-5. 線形座標変換の Jacobi 行列, 問題 B-8. 逆変換の Jacobi 行列の行列式
6.4 「距離」を座標で表す——計量テンソルの導入¶
動機:座標が変わっても距離は変わらない¶
🟡 リナ: さて、ここからがこの章の核心よ。物理で最も基本的な量の一つが「2 点間の距離」。距離は座標の取り方に依存しない——東京からニューヨークまでの距離は、地図の描き方を変えても変わらないでしょう?
🔵 カイ: はい、当然です。
🟡 リナ: でも、距離を計算する式は座標によって変わる。直交座標なら Pythagoras (ピタゴラス) の定理そのもの:
じゃあ極座標では? \(dx = \cos\theta\,dr - r\sin\theta\,d\theta\)、\(dy = \sin\theta\,dr + r\cos\theta\,d\theta\) を代入してみて。
⚪ メイ: 計算してみます。
第 1 項を展開:
第 2 項を展開:
🔵 カイ: あ、\(dr\,d\theta\) の項が符号逆で打ち消し合いそうですね!
⚪ メイ: その通り。足し合わせると交差項が消えて:
🔵 カイ: おお、きれいにまとまった! でも……\(d\theta^2\) の前に \(r^2\) がついてますね。直交座標のときは \(dx^2 + dy^2\) で係数が全部 1 だったのに。
🟡 リナ: そう。ここが肝心なポイントよ。極座標では、\(\theta\) を 1 ラジアン変えたときに実際に移動する距離は、原点からの距離 \(r\) に依存する。\(r = 1\) なら 1 ラジアンで距離 1 だけど、\(r = 10\) なら 1 ラジアンで距離 10。だから \(d\theta^2\) の前に \(r^2\) という「重み」がつくの。
🔵 カイ: つまり、同じ \(d\theta\) でも、場所によって「実際の距離」が違うってことですか。
🟡 リナ: その通り。これが「ものさしが場所によって変わる」ということの正体よ。図 6.4「極座標の計量の意味」 を見ると、同じ \(d\theta\) でも \(r\) が大きいほど弧の長さが長くなっているのが一目で分かるわね。
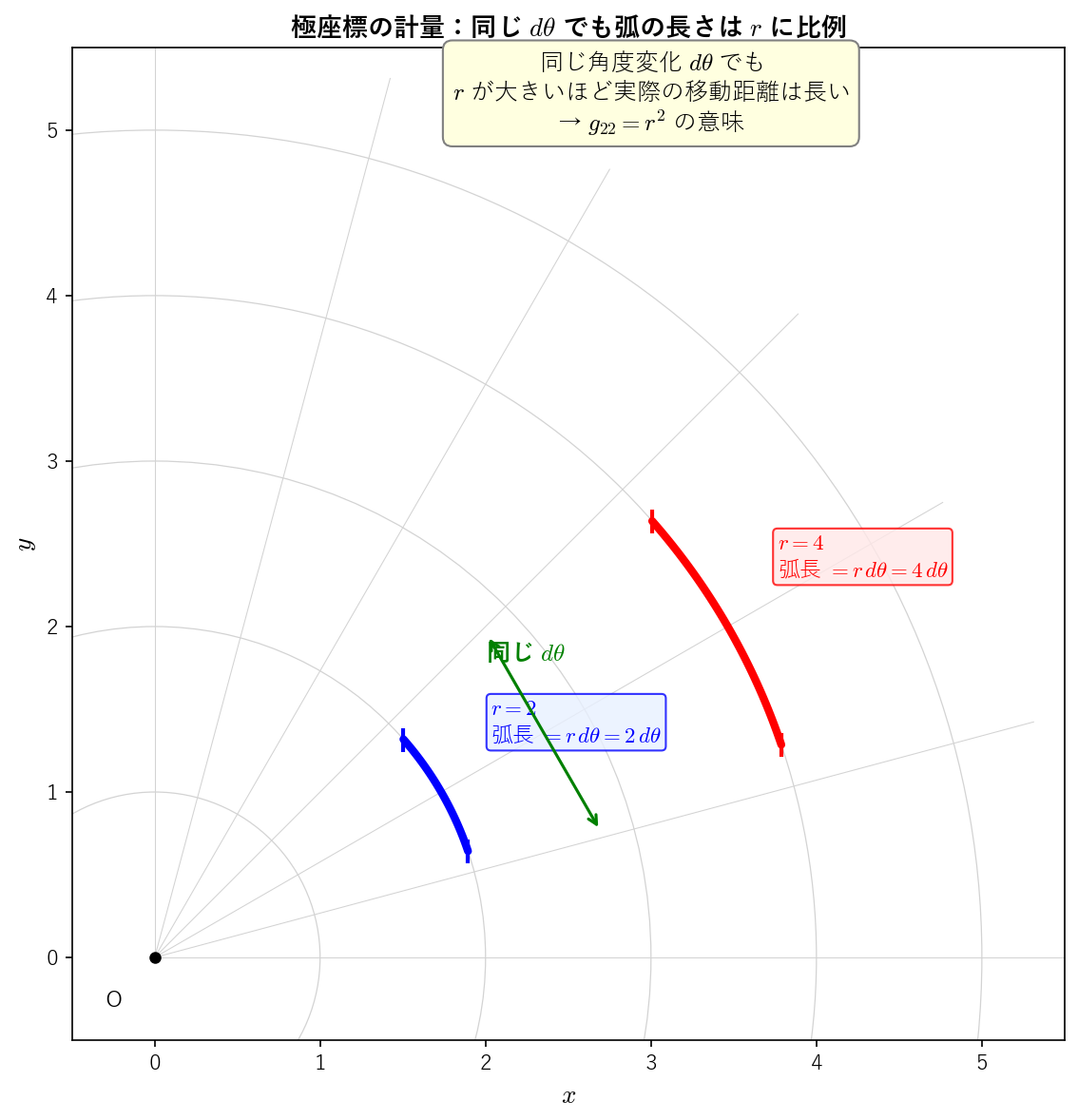
図 6.4: 極座標の計量の意味。同じ角度変化 \(d\theta\) でも、原点からの距離 \(r\) が大きいほど実際の弧の長さ \(r\,d\theta\) は長くなる。これが \(g_{22} = r^2\) の幾何学的意味。
✅ 理解度チェック: 極座標の線素 \(ds^2 = dr^2 + r^2\,d\theta^2\) において、\(d\theta^2\) の前に \(r^2\) がつく物理的な意味は何でしょうか?
答え
角度 \(\theta\) を同じだけ変えても、原点からの距離 \(r\) が大きいほど実際に移動する距離が大きくなることを意味する。つまり \(\theta\) 方向の「ものさし」の目盛り幅が \(r\) に比例して変わる。
計量テンソル \(g_{ij}\) の定義¶
🟡 リナ: この「距離の公式」を一般的に書くための道具が計量テンソル(metric tensor) \(g_{ij}\) なの。
座標 \((u^1, u^2)\)——極座標なら \((u^1, u^2) = (r, \theta)\)——を使って、微小距離の 2 乗を
と書く。ここで §3 で導入した Einstein の縮約規約を使っているわ——\(g_{ij}\,du^i\,du^j\) を見てみて。\(i\) という添字は \(g_{ij}\) では下付き、\(du^i\) では上付きに現れている——つまり同じ添字 \(i\) が上と下の両方にあるから、\(i\) について和をとる。同様に \(j\) も \(g_{ij}\) で下、\(du^j\) で上に現れているから \(j\) についても和をとるの。つまり \(g_{ij}\,du^i\,du^j = \sum_{i=1}^{2}\sum_{j=1}^{2} g_{ij}\,du^i\,du^j\) の略記ね。2 次元(\(i, j\) がそれぞれ 1, 2 を走る)なら、4 つの項を全部書き出すと:
🔵 カイ: \(g_{12}\) と \(g_{21}\) は別々の成分ですか?
🟡 リナ: いい質問ね。実は、\(du^1\,du^2 = du^2\,du^1\)(ただの数の掛け算)だから、\(g_{12}\,du^1\,du^2 + g_{21}\,du^2\,du^1 = (g_{12} + g_{21})\,du^1\,du^2\) と書ける。「\(g_{12}\) と \(g_{21}\) の和」だけが意味を持つの。だから常に \(g_{12} = g_{21}\) と対称にとる約束にしておくわ。一般に \(n\) 次元では、計量テンソルは対称条件 \(g_{ij} = g_{ji}\) を満たすとして扱う。対称行列だから、\(n \times n\) なら独立成分は \(n(n+1)/2\) 個——対角成分が \(n\) 個、上三角部分が \(n(n-1)/2\) 個ね。2 次元なら \(g_{11}, g_{12} = g_{21}, g_{22}\) の 3 個。4 次元時空なら \(n = 4\) で \(4 \times 5 / 2 = 10\) 個。前章で「重力は時空の曲がりである」と学んだわね。時空の曲がり方——つまり「場所ごとにものさしがどう変わるか」——を記述するのがまさにこの計量テンソル \(g_{\mu\nu}\) なの。
🔵 カイ: 2 次元で 3 個、4 次元で 10 個……急に増えますね。Newton 重力だとポテンシャル \(\Phi\) は 1 個の関数だけでしたよね。それが 10 個に増えるって、何がそんなに複雑になるんですか?
🟡 リナ: Newton 重力は「質量が引き合う力の強さ」だけを記述していたけれど、一般相対論では時間の遅れや空間の歪みも含めた時空全体の幾何を記述するの。だから 1 個では足りなくて 10 個必要になる——それだけ重力の記述が豊かになるということよ。
⚪ メイ: なるほど、時間と空間の両方の歪みを記述するから、成分がたくさん必要になるのね。
🟡 リナ: さて、話を戻しましょう。具体的に極座標の計量テンソルの成分を読み取ってみて。
⚪ メイ: 極座標の場合、\(ds^2 = dr^2 + r^2\,d\theta^2\) だから、比較すると:
行列で書けば:
🔵 カイ: 直交座標だと \(g_{ij}\) はどうなるんですか?
🟡 リナ: \(ds^2 = dx^2 + dy^2\) だから:
単位行列——つまり Kronecker のデルタね。計量テンソルが単位行列になる座標系が直交座標なの。
🔵 カイ: なるほど。直交座標が「特別に単純」なのは、計量テンソルが定数の単位行列だからなんですね。じゃあ逆に、計量テンソルが単位行列にならない座標系では、距離の計算が面倒になるだけで、物理的な内容は何も変わらないんですか?
🟡 リナ: 平坦な空間の中で座標を変えるだけなら、その通り——計算の見た目が変わるだけで物理は同じ。でも、本当に曲がった空間では話が違ってくる。それを次に見てみましょう。
🔵 カイ: 「本当に曲がった空間」だと何が変わるのか……気になります。
✅ 理解度チェック: 計量テンソル \(g_{ij}\) が対称(\(g_{ij} = g_{ji}\))であるのはなぜでしょうか?
答え
\(ds^2 = g_{ij}\,du^i\,du^j\) の中で \(du^i\,du^j = du^j\,du^i\)(ただの数の積)なので、\(g_{ij}\) と \(g_{ji}\) の和だけが物理的意味を持つ。そのため常に対称にとる約束にしている。
✅ 理解度チェック: 極座標の計量テンソル \(g_{ij}\) を行列で書いてください。
答え
\(g_{ij} = \begin{pmatrix} 1 & 0 \\ 0 & r^2 \end{pmatrix}\)。\(g_{22} = r^2\) は「\(\theta\) 方向の座標 1 目盛りあたりの実際の距離が \(r\) に比例する」ことを表す。
球座標の計量テンソル¶
🟡 リナ: 3 次元の球座標 \((r, \theta, \varphi)\) でも同じことをやってみましょう。\(dx^2 + dy^2 + dz^2\) を球座標で書き直すの。方針は 2 次元のときと同じ——\(x, y, z\) それぞれの全微分を求めて 2 乗し、足し合わせる。\(dx = \sin\theta\cos\varphi\,dr + r\cos\theta\cos\varphi\,d\theta - r\sin\theta\sin\varphi\,d\varphi\) のように 3 変数になるから項は増えるけれど、2 次元のときと全く同じ仕組みよ。\(dx^2 + dy^2 + dz^2\) を展開すると交差項(\(dr\,d\theta\)、\(dr\,d\varphi\)、\(d\theta\,d\varphi\) の項)が出てくるけれど、\(x, y, z\) の 3 つからの寄与を足し合わせると、\(\sin^2\alpha + \cos^2\alpha = 1\) のおかげで全て相殺するの。
🔵 カイ: 2 次元のときも交差項がきれいに消えましたけど、3 次元でも同じことが起きるんですね。
🟡 リナ: ヒント:たとえば \(dr\,d\theta\) の係数を見ると、\(dx^2\) から \(2r\sin\theta\cos\theta\cos^2\varphi\)、\(dy^2\) から \(2r\sin\theta\cos\theta\sin^2\varphi\)、\(dz^2\) から \(-2r\sin\theta\cos\theta\) が出てきて、足すと \(2r\sin\theta\cos\theta(\cos^2\varphi + \sin^2\varphi - 1) = 0\) となって消える。\(dr\,d\varphi\) の交差項も同じく \(\cos^2\varphi + \sin^2\varphi - 1 = 0\) 型の相殺で消え、\(d\theta\,d\varphi\) の交差項は \(dx^2\) からの寄与 \(-2r^2\sin\theta\cos\theta\sin\varphi\cos\varphi\) と \(dy^2\) からの寄与 \(+2r^2\sin\theta\cos\theta\sin\varphi\cos\varphi\) が打ち消し合って消える(\(dz^2\) からは \(d\varphi\) を含む項が出ないので寄与ゼロ)。全ての計算は練習問題 問題 M-2. 球座標の線素の導出 で確認してみてね。結果は:
⚪ メイ: したがって計量テンソルは:
🔵 カイ: \(d\varphi^2\) の前に \(r^2\sin^2\theta\) がつくのは……ああ、赤道付近(\(\theta = \pi/2\))では経度を 1 ラジアン変えると \(r\) だけ移動するけど、北極付近(\(\theta \approx 0\))ではほとんど移動しないからですね! でも \(\theta = 0\)(北極)だと \(g_{33} = 0\) になりますよね。計量テンソルの成分がゼロって、何か問題にならないんですか?
🟡 リナ: いい質問ね。\(g_{33} = 0\) は「\(\varphi\) を変えても移動距離がゼロ」——つまり北極では全ての経線が 1 点に集まっているから、経度の違いに物理的な意味がないということ。座標としての \(\varphi\) は定義されているけれど、そこでは \(\varphi\) 方向の「ものさし」の目盛り幅がゼロになるの。これは座標の特異点(coordinate singularity)と呼ばれるもので、空間自体が壊れているわけではない——別の座標を使えば問題なく記述できるわ。地球で考えるとわかりやすいわね。赤道上では経度 1° で約 111 km 移動するけど、北緯 60° では約 56 km しか移動しない。\(\sin^2\theta\) がその「場所による距離の違い」を表現しているの。
✅ 理解度チェック: 3 次元球座標の計量テンソル \(g_{33} = r^2\sin^2\theta\) が \(\theta\) に依存する幾何学的理由は何でしょうか?
答え
\(\varphi\) 方向の円周の半径は \(r\sin\theta\) であり、天頂角 \(\theta\) によって変わるため。赤道(\(\theta = \pi/2\))では最大で、極(\(\theta = 0\) や \(\pi\))ではゼロになる。
🟡 リナ: ここまで 3 つの座標系で計量テンソルを求めたわね。メイ、まとめてみてくれる?
⚪ メイ: やってみます。座標系によってこんなに形が違うのね。
表 6.1: 各座標系における計量テンソルの比較
| 座標系 | 線素 \(ds^2\) | \(g_{ij}\)(行列表示) | 空間の曲がり |
|---|---|---|---|
| 2D 直交 \((x, y)\) | \(dx^2 + dy^2\) | \(\mathrm{diag}(1, 1)\) | 平坦 |
| 2D 極座標 \((r, \theta)\) | \(dr^2 + r^2\,d\theta^2\) | \(\mathrm{diag}(1, r^2)\) | 平坦 |
| 3D 球座標 \((r, \theta, \varphi)\) | \(dr^2 + r^2\,d\theta^2 + r^2\sin^2\theta\,d\varphi^2\) | \(\mathrm{diag}(1, r^2, r^2\sin^2\theta)\) | 平坦 |
📝 練習問題:
- 計量テンソルの読み取り・逆計量 → 問題 B-2. 3 次元球座標の逆計量, 問題 B-3. 一般 2 次元計量の行列表示, 問題 B-4. 球面上の特定の点での計量テンソル
球面の計量——曲がった空間の例¶
🟡 リナ: ここまでは平坦な空間を曲線座標で書いただけだった。次に、本当に曲がった空間の例を見てみましょう。半径 \(a\) の球面(2 次元の曲がった空間)を、座標 \((u^1, u^2) = (\theta, \varphi)\) で記述すると:
計量テンソルは——2 次元だから \(2 \times 2\) 行列で、\((u^1, u^2) = (\theta, \varphi)\) の順に対応させて:
🔵 カイ: あれ、これって 3 次元球座標の \(g_{22}\) と \(g_{33}\) の部分を取り出して \(r = a\)(定数)にしたものですよね?
🟡 リナ: いい観察ね。球面は 3 次元空間に埋め込まれた 2 次元の曲面だから、3 次元の計量で \(r\) を固定した「断面」が球面の計量になるの。
🔵 カイ: でも、平坦な平面の極座標でも計量テンソルは場所に依存していましたよね(\(g_{22} = r^2\))。球面でも場所に依存している。計量テンソルが場所に依存するだけで「曲がっている」と言えるんですか?
🟡 リナ: いい質問ね。実は、計量テンソルが場所に依存するだけでは、空間が曲がっているかどうかは判定できないの。平坦な空間でも曲線座標を使えば \(g_{ij}\) は場所に依存する。本当に曲がった空間では、どんな座標を使っても \(g_{ij}\) を定数にすることが(全体では)できない。この判定には、後の章で学ぶ Riemann 曲率テンソル が必要になる。今は「計量テンソルが場所に依存する ≠ 空間が曲がっている」ということだけ覚えておいて。
⚪ メイ: つまり「座標の曲がり」と「空間の曲がり」は別の概念で、それを区別する道具がまだ必要ということね。
✅ 理解度チェック: 計量テンソルが場所に依存しているとき、空間が本当に曲がっているかどうかを判定するには何が必要でしょうか?
答え
Riemann 曲率テンソルが必要。計量テンソルが場所に依存するだけでは空間の曲がりは判定できない(平坦な空間でも曲線座標を使えば計量は場所に依存する)。
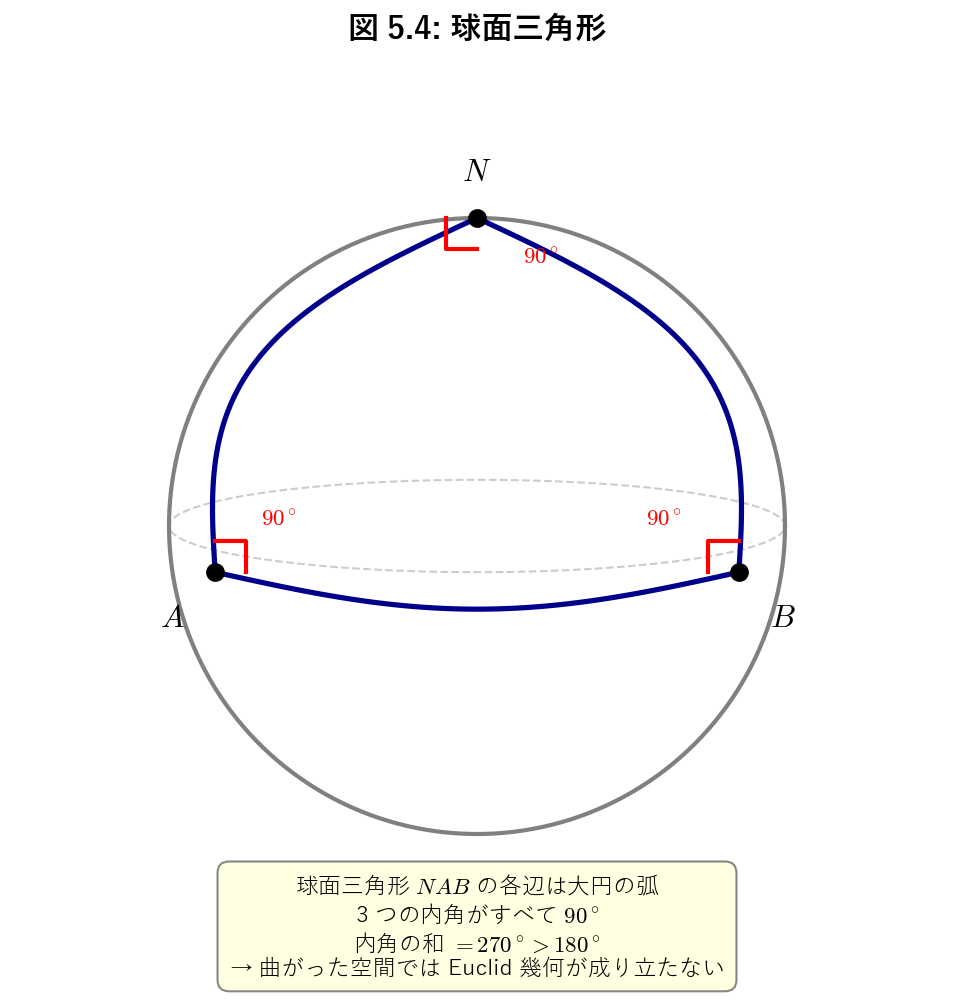 図 6.5: 球面三角形 NAB。3 つの内角がすべて 90° で、内角の和は 270° > 180°。曲がった空間では Euclid 幾何が成り立たないことの直感的な例。
図 6.5: 球面三角形 NAB。3 つの内角がすべて 90° で、内角の和は 270° > 180°。曲がった空間では Euclid 幾何が成り立たないことの直感的な例。
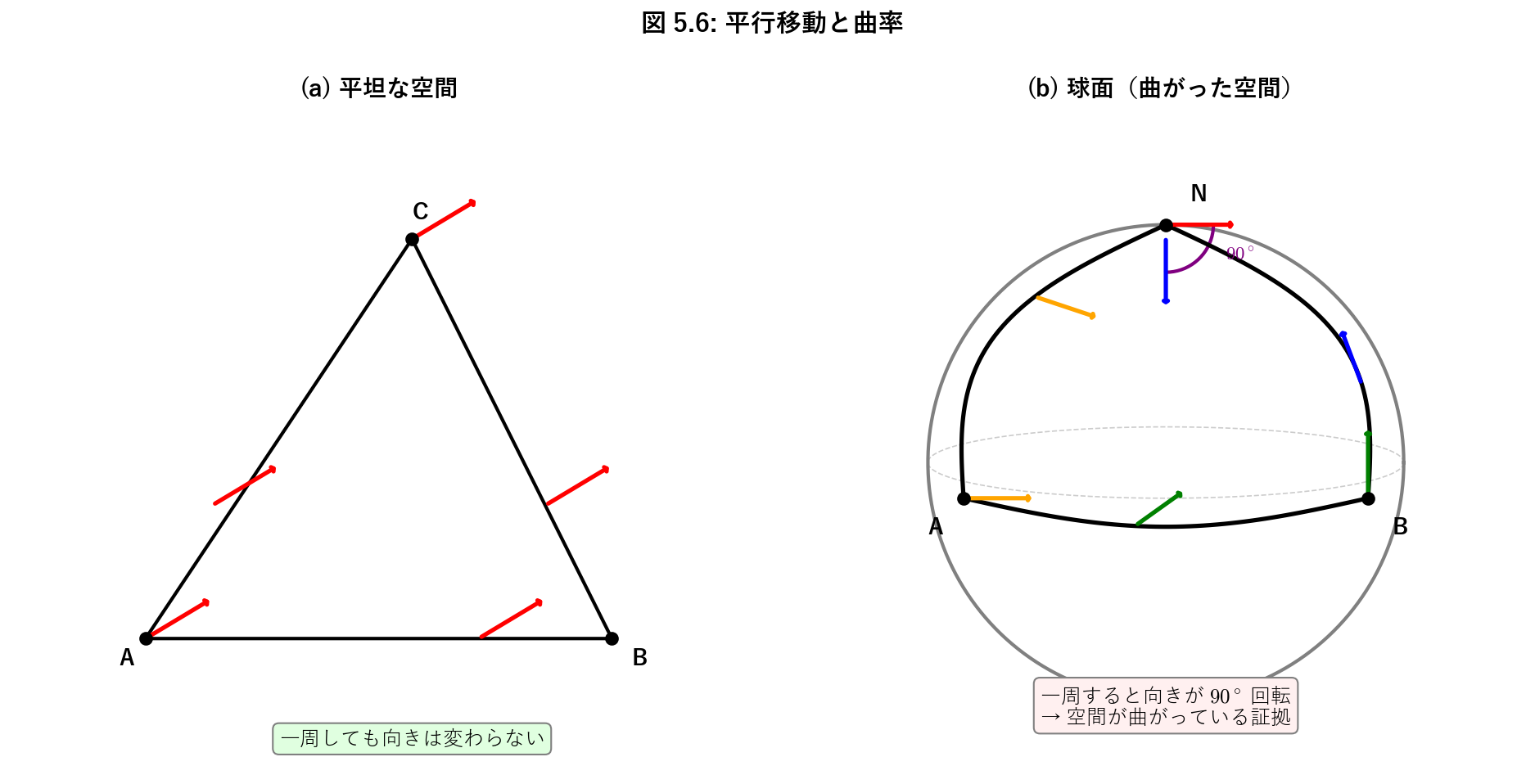 図 6.6: 平坦な空間ではベクトルを一周させても向きは変わらないが、球面上では 90° 回転して戻る。これが「空間の曲がり」の本質的な検出方法であり、Riemann 曲率テンソルの直感的な意味。
図 6.6: 平坦な空間ではベクトルを一周させても向きは変わらないが、球面上では 90° 回転して戻る。これが「空間の曲がり」の本質的な検出方法であり、Riemann 曲率テンソルの直感的な意味。
6.5 計量テンソルの変換則¶
距離の不変性から変換則を導く¶
🟡 リナ: 計量テンソルの最も重要な性質は、座標を変えたとき、距離 \(ds^2\) が変わらないように成分が変換されるということ。これを数式で導いてみましょう。
ある座標系 \((x^1, x^2)\) での計量を \(g_{ij}\)、別の座標系 \((u^1, u^2)\) での計量を \(g'_{ij}\) とする。ここで \((x^1, x^2)\) は直交座標とは限らない——どんな座標系でも出発点にできるわ。距離は座標の取り方によらないから:
ここで \(dx^i = \dfrac{\partial x^i}{\partial u^k}\,du^k\) を左辺に代入する。同様に \(dx^j = \dfrac{\partial x^j}{\partial u^l}\,du^l\) と書くの。ここで \(k\) とは別の文字 \(l\) を使っているのは、\(dx^i\) の展開ですでに \(k\) がダミー添字(和をとる添字)として使われているから——もし \(dx^j\) の展開にも同じ \(k\) を使うと、1 つの式に \(k\) が 3 回以上現れてしまい、「\(k\) について何回和をとるのか」が曖昧になってしまう。別の文字 \(l\) を使えば、\(k\) と \(l\) がそれぞれ独立に 1 から 2 まで走る二重和(\(\sum_k \sum_l\))だと明確になるの。すると:
一方、右辺は \(ds^2 = g'_{kl}\,du^k\,du^l\) だった。つまり:
🔵 カイ: 両辺に同じ \(du^k\,du^l\) がかかっているから、中身の係数が等しいはず……ですよね?
🟡 リナ: 直感的にはその通り。ただし \(du^k\,du^l\) は単なる数(スカラー)の積だから、「任意の方向で成り立つ」ことを使って丁寧に示す必要があるの。この等式はどんな方向の微小変位 \((du^1, du^2)\) を選んでも成り立たなければならない。ここから「係数が等しい」ことを示すわ。まず 1 変数の類推で感覚を掴んでおきましょう。\(ax^2 + bx + c = a'x^2 + b'x + c'\) が全ての \(x\) で成り立つなら、\(x = 0\) を代入して \(c = c'\)、\(x = 1\) を代入して \(a + b = a' + b'\)、\(x = -1\) を代入して \(a - b = a' - b'\)——こうして 3 つの値を試すだけで \(a = a'\), \(b = b'\), \(c = c'\) が全部決まるわね。ポイントは「未知数の数(3 個)だけ独立な条件を作れば全部決まる」ということ。2 変数でも同じ発想よ。§4 で見たように \(g'_{kl}\) は対称(\(g'_{12} = g'_{21}\))だから、決めるべき独立成分は \(g'_{11}\), \(g'_{12}\), \(g'_{22}\) の 3 つだけ。3 つの未知数を決めるには 3 通りの方向を試せば十分——連立方程式を解くのと同じね。具体的にやってみましょう:
- 方向 1:\(du^2 = 0\) として \(du^1\) だけ動かす。すると両辺は \(g'_{11}(du^1)^2 = \bigl(g_{ij}\frac{\partial x^i}{\partial u^1}\frac{\partial x^j}{\partial u^1}\bigr)(du^1)^2\) となる。\((du^1)^2 \neq 0\) で割れるから \(g'_{11}\) の値が決まる
- 方向 2:\(du^1 = 0\) とすれば、同様に \(g'_{22}\) が決まる
- 方向 3:\(g'_{12}\) を決めるには、\(du^1\) と \(du^2\) が両方ゼロでない方向が必要。最も簡単な選択として \(du^1 = du^2 = \epsilon\)(同じ微小量)とすると、左辺は \((g'_{11} + 2g'_{12} + g'_{22})\epsilon^2\)、右辺は
となる。\(\epsilon^2 \neq 0\) で割り、方向 1・2 で決まった \(g'_{11}\), \(g'_{22}\) に対応する項を引けば \(2g'_{12} = 2g_{ij}\frac{\partial x^i}{\partial u^1}\frac{\partial x^j}{\partial u^2}\) が残るから \(g'_{12}\) も一意に決まる。
⚪ メイ: 3 つの方向を試すだけで独立成分が全部決まる——多項式の係数比較と本当に同じ発想なのね。
🔵 カイ: ちょっと待ってください。方向 1 と 2 で \(g'_{11}\) と \(g'_{22}\) を決めて、方向 3 で \(g'_{12}\) を決める——つまり 3 つの方向を選べば 3 つの未知数が全部決まるということですね。でも方向 3 で \(du^1 = du^2 = \epsilon\) と選んだのは便利だからであって、別の組み合わせでも同じ \(g'_{12}\) が出るんですか?
🟡 リナ: その通り。こうして 3 つの独立成分 \(g'_{11}\), \(g'_{12}\), \(g'_{22}\) が全て一意に決まった。対称行列の独立成分は 3 つしかないから、その 3 つが決まれば行列全体が決まるわ。
::: {.callout-note collapse="true" title="補足:なぜ 3 方向で十分か"} 念のため確認しておくと——もし別の方向、たとえば \(du^1 = 1\), \(du^2 = 3\) を代入したとしても、左辺は \(g'_{11} + 6g'_{12} + 9g'_{22}\) で、右辺も同じ値になる。なぜなら、3 つの成分はすでに方向 1〜3 で決定されていて、どんな方向の二次形式の値もこの 3 つの成分だけで決まるから。つまり、2 つの二次形式が 3 つの独立な方向で一致すれば、全ての方向で一致する——ちょうど 2 つの二次関数が 3 点で一致すれば同一の関数であるのと同じ理屈ね。 :::
まとめると:
🔵 カイ: なるほど、2 次元なら独立成分が 3 つ(対称だから)で、3 通りの方向を選べば全部決まる……ということは \(n\) 次元でも同じ発想で、独立成分の数だけ方向を選べばいいんですか? でも、\(du^1 = du^2 = \epsilon\) という「斜め方向」を選ぶのは、ちょっとトリッキーに感じます。他の方向でもいいんですか?
🟡 リナ: いい質問。他の方向——たとえば \(du^1 = \epsilon\), \(du^2 = 2\epsilon\) でも構わないわ。要は \(g'_{11}\) と \(g'_{22}\) を先に決めた後、\(du^1\) と \(du^2\) が両方ゼロでない方向を 1 つ選べば \(g'_{12}\) が決まる。どの方向を選んでも同じ \(g'_{12}\) が出てくる——それが「任意の方向で成り立つ」ことの帰結なの。\(n\) 次元なら \(n(n+1)/2\) 通りの方向を選べば全成分が決まるわ。
🔵 カイ: つまり、方程式の数(選べる方向の数)が未知数の数(独立成分の数)以上あるから、全部決まるんですね。連立方程式と同じ発想だ。
🟡 リナ: その通り。直感的に言えば、「どの方向に微小変位をとっても距離が一致する」ということは、距離の公式の全ての係数が一致することを要求している——ちょうど、2 つの多項式が全ての \(x\) で等しいなら各次数の係数が等しいのと同じ発想ね。これが計量テンソルの変換則よ。Jacobi 行列の成分 \(\dfrac{\partial x^i}{\partial u^k}\) が 2 つかかっている。テンソルの言葉でいうと、計量テンソルは 2 階の共変テンソル(rank-2 covariant tensor)——下添字が 2 つあるテンソル——だということを示している。第 2 章 で「テンソルの階数は添字の数」と学んだわね。\(g_{kl}\) は下添字が 2 つだから「2 階」、そして変換則に Jacobi 行列が 2 つかかるのがその表れよ。
🔵 カイ: 「共変」って何ですか?
🟡 リナ: いい質問ね。テンソルには変換則の違いによって 2 種類あるの。変換則で \(\dfrac{\partial x^i}{\partial u^k}\)——つまり「古い座標を新しい座標で微分したもの」——が使われるテンソルを共変テンソルと呼び、添字を下に書く。たとえば計量テンソルの変換則 \(g'_{kl} = \dfrac{\partial x^i}{\partial u^k}\dfrac{\partial x^j}{\partial u^l}\,g_{ij}\) がまさにこの形ね。逆に \(\dfrac{\partial u^k}{\partial x^i}\)(逆行列の成分)が使われるものを反変テンソルと呼び、添字を上に書く——たとえば微小変位 \(du^k = \dfrac{\partial u^k}{\partial x^i}\,dx^i\) は反変的に変換されるわ。
🔵 カイ: なぜ 2 種類に分ける必要があるんですか?
🟡 リナ: 物理量によって「座標を変えたときの変換のされ方」が違うからよ。一番分かりやすい例で考えてみましょう。長さの単位をメートルからセンチメートルに変えたとする——これは「座標の目盛りを一様に 100 倍細かくする」という最も単純な座標変換ね。同じ変位でも数値は 100 倍になる(\(du^k\) が大きくなる)——座標の目盛りが細かくなると、同じ距離を表すのに大きな数値が必要になるわね。たとえば 3 m の変位は 300 cm——数値が大きくなる。これが反変的な変換。
🔵 カイ: 逆に小さくなるものもあるんですか?
🟡 リナ: そう。「1 メートルあたりの温度変化」を考えてみて。もし 1 m 進むごとに温度が 2℃ 上がるなら、1 cm あたりでは 0.02℃ しか上がらない——数値が 1/100 になる(勾配 \(\partial f/\partial u^k\) が小さくなる)。目盛りが細かくなると、1 目盛りあたりの変化量は小さくなる。これが共変的な変換。つまり、同じ座標変換に対して数値が大きくなるもの(反変、上添字)と小さくなるもの(共変、下添字)がある——変換の「向き」が逆なの。
⚪ メイ: 変位は目盛りが細かくなると数値が大きくなり、勾配は逆に小さくなる——変換の方向が逆だから「反変」と「共変」なのね。
🟡 リナ: そう。今の単位変換は目盛りが一様に変わる最も単純な例だけど、極座標のように場所ごとに目盛りの変わり方が異なる場合でも同じことが起きるわ。たとえば \(r\) が大きいところでは、\(\theta\) を 1 ラジアン変えたときの実際の移動距離は \(r\) に比例して大きくなる——つまり 1 目盛りあたりの「実際の距離」が大きい。だから、同じ物理的な変位(たとえば 1 m)を表すのに必要な \(d\theta\) の数値は小さくて済む——これが反変的な振る舞い。
🔵 カイ: 逆に共変的な方は? さっきの温度勾配の話が極座標でも成り立つんですか?
🟡 リナ: その通り。具体的に考えてみましょう。たとえば部屋の中で \(x\) 方向に 1 m あたり 2℃ ずつ温度が上がっているとする——これが「空間的に一様な温度変化」ね。この温度場を極座標で記述すると、\(\theta\) 方向の温度勾配 \(\partial T/\partial\theta\) は \(r\) が大きいほど数値が大きくなる。なぜなら、\(r\) が大きいところでは 1 ラジアンあたりに通過する実際の距離が \(r\) に比例して長くなるから、その分だけ温度変化も大きくなるの。たとえば \(r = 1\) m なら 1 ラジアンで 1 m 進むから温度変化は約 2℃ だけど、\(r = 5\) m なら 1 ラジアンで 5 m 進むから温度変化は約 10℃——\(\partial T/\partial\theta\) の数値が 5 倍になるわ。これが共変的な振る舞い。この区別をきちんとしないと、座標に依存しない物理法則が書けないの。詳しくは次章で体系的に扱うけれど、今は「計量テンソルは下添字 2 つ = 共変」とだけ覚えておいて。
🔵 カイ: 正直まだ「共変」「反変」の区別はピンと来ないですけど……今は「計量テンソルは下添字 2 つ」ということだけ押さえておきます。
🟡 リナ: それで十分よ。今の段階では「変換則の形が違うから名前を分けている」くらいの理解で大丈夫。次章で具体例をたくさん見れば自然に身につくわ。
📝 練習問題:
具体例で確認¶
🟡 リナ: 変換則が正しいことを、直交座標から極座標への変換で確認してみましょう。ここでは一般論の \((x^1, x^2)\) が直交座標 \((x, y)\)、\((u^1, u^2)\) が極座標 \((r, \theta)\) に対応するわ。
直交座標での計量は \(g_{ij} = \delta_{ij}\)(単位行列)。Jacobi 行列の成分は:
\(g'_{11}\)(\(r\)-\(r\) 成分)を計算。変換則で \(k = l = 1\)(つまり \(r\))とし、\(g_{ij} = \delta_{ij}\) だから \(i = j\) の項だけ生き残る:
\(g'_{22}\)(\(\theta\)-\(\theta\) 成分)を計算:
\(g'_{12}\)(\(r\)-\(\theta\) 成分)を計算:
🔵 カイ: おお、さっき求めた極座標の計量 \(g_{ij} = \mathrm{diag}(1, r^2)\) がちゃんと再現された! でも、もし出発点の座標系が直交座標じゃなくて、たとえば別の曲線座標だったとしても、同じ変換則で計量が求まるんですか?
🟡 リナ: もちろん。この変換則は出発点がどんな座標系でも成り立つわ。直交座標から出発する必要はないの。今回は \(g_{ij} = \delta_{ij}\) だったから計算が簡単だっただけ。たとえば極座標から放物線座標に変換するときも、極座標の \(g_{ij} = \mathrm{diag}(1, r^2)\) を出発点にして同じ変換則を適用すればいい——練習問題でやってみてね。
🔵 カイ: 出発点が何であっても同じ公式が使えるのは安心です。でも、3 回座標変換を繰り返しても——たとえば直交→極座標→放物線座標→また別の座標——最終的な計量は「最初と最後の座標の関係」だけで決まるんですか? 途中の経路は関係ない?
🟡 リナ: その通り。変換則を 2 回続けて適用すれば、合成変換の Jacobi 行列(連鎖律で求まる)を 1 回適用したのと同じ結果になるわ。途中でどの座標を経由しても最終結果は同じ——これが「計量テンソルは座標に依存するが、距離という物理量は座標に依存しない」ことの表れね。練習問題で確認してみて。
✅ 理解度チェック: 計量テンソルの変換則で、Jacobi 行列の成分が何個かかるでしょうか?
答え
2 個。\(g'_{kl} = \frac{\partial x^i}{\partial u^k}\frac{\partial x^j}{\partial u^l} g_{ij}\) のように、添字 1 つにつき Jacobi 行列が 1 つかかる。計量テンソルは 2 階の共変テンソルだから 2 個。
6.6 「ものさしが場所によって変わる」とは¶
座標基底ベクトルの長さ¶
🟡 リナ: 計量テンソルの意味をもう少し深く掘り下げましょう。極座標の基底ベクトル \(\boldsymbol{e}_r\) と \(\boldsymbol{e}_\theta\) を考えるわね。
一般相対論では、長さを 1 に揃えた単位ベクトルではなく、座標の構造をそのまま反映した基底を使うのが標準なの——理由はすぐ後で説明するわ。その基底を座標基底(coordinate basis)と呼ぶ。直感的に言えば「他の座標を固定して、ある座標だけを 1 だけ変えたときに実際にどれだけ移動するか」を表すベクトルのこと。\(\boldsymbol{e}_r\) は「\(\theta\) を固定して \(r\) 方向に進んだときの変位の割合」、\(\boldsymbol{e}_\theta\) は「\(r\) を固定して \(\theta\) 方向に進んだときの変位の割合」を表すの。
🔵 カイ: 「1 だけ変える」というのは、\(r\) なら 1 メートル、\(\theta\) なら 1 ラジアンということですか?
🟡 リナ: 鋭い質問ね。数学的に正確に言えば、位置ベクトル \(\boldsymbol{r}\) の座標 \(u^i\) による偏微分 \(\partial\boldsymbol{r}/\partial u^i\) そのもの——「座標を微小量 \(\Delta u^i\) だけ変えたときの変位 \(\Delta\boldsymbol{r}\) を \(\Delta u^i\) で割った極限」ね。直感的には「座標 \(u^i\) を 1 だけ変えたときの変位」と思ってよいけれど、これは微分の定義を使った極限操作の結果であって、実際に有限の 1 ラジアンだけ動かすわけではないの——微分係数が「接線の傾き」であるのと同じ感覚ね。「ベクトルを偏微分する」と聞くと難しそうだけど、やることは単純よ。まず、平面上の点の位置ベクトルは直交座標の単位基底ベクトル \(\boldsymbol{e}_x\), \(\boldsymbol{e}_y\)(\(x\) 方向と \(y\) 方向を向いた長さ 1 の矢印で、場所によらず向きも長さも変わらない定数ベクトル)を使って \(\boldsymbol{r} = x\,\boldsymbol{e}_x + y\,\boldsymbol{e}_y\) と書ける。「ベクトルを偏微分する」とは、この各成分 \(x\), \(y\) をそれぞれ偏微分するだけのこと。\(\boldsymbol{e}_x\), \(\boldsymbol{e}_y\) は定数だから微分の外に出せて、\(x, y\) の部分だけに偏微分がかかるの。\(x = r\cos\theta\), \(y = r\sin\theta\) を代入して偏微分すると:
🔵 カイ: \(\boldsymbol{e}_r\) の長さは……\(\sqrt{\cos^2\theta + \sin^2\theta} = 1\)。\(\boldsymbol{e}_\theta\) の長さは……\(\sqrt{r^2\sin^2\theta + r^2\cos^2\theta} = r\)。
🟡 リナ: そう。\(\boldsymbol{e}_\theta\) の長さは \(r\) に等しい——原点から離れるほど大きくなる。
🔵 カイ: 自分で計算しておいてなんですけど……基底ベクトルの長さが場所によって違うって、変じゃないですか? 高校で習った単位ベクトル \(\hat{\boldsymbol{e}}_r\), \(\hat{\boldsymbol{e}}_\theta\) はどちらも長さ 1 だったのに、なぜわざわざ正規化しないんですか?
🟡 リナ: いい質問。高校で習う \(\hat{\boldsymbol{e}}_r\), \(\hat{\boldsymbol{e}}_\theta\) は正規化された基底(normalized basis)——長さを 1 に揃えたもの。一方、ここで使っている \(\boldsymbol{e}_r\), \(\boldsymbol{e}_\theta\) は座標基底——座標を 1 だけ変えたときの自然な変位。一般相対論では座標基底を使うのが標準なの。理由は、座標基底を使うと \(ds^2 = g_{ij}\,du^i\,du^j\) という距離の公式がそのまま「基底の内積」として読めるから——正規化してしまうと、この対応が崩れて計量テンソルの変換則が複雑になるの。図 6.3「同じ 2 次元平面を 2 つの座標系で覆う」 をもう一度見てみて——極座標のメッシュが原点から離れるほど間隔が広がっているでしょう? あれがまさに \(\boldsymbol{e}_\theta\) の長さが \(r\) に比例していることの表れなの。原点近くでは \(\theta\) 方向のメッシュ間隔が狭い(\(\boldsymbol{e}_\theta\) が短い)、遠くでは広い(\(\boldsymbol{e}_\theta\) が長い)——これが座標基底の長さが場所によって変わるということよ。
🔵 カイ: なるほど。原点近くでは \(\boldsymbol{e}_\theta\) が短い矢印、遠くでは長い矢印になるイメージですね。
🟡 リナ: その通り。そして実は、座標基底どうしの内積がまさに計量テンソルの成分になるの。理由を見てみましょう。微小変位ベクトルは \(d\boldsymbol{r} = \boldsymbol{e}_i\,du^i\)(座標基底の定義から)と書ける。距離の 2 乗は \(ds^2 = d\boldsymbol{r} \cdot d\boldsymbol{r}\) だから:
一方、計量テンソルの定義から \(ds^2 = g_{ij}\,du^i\,du^j\)。比較すれば:
⚪ メイ: \(g_{ij}\) が「基底ベクトルの内積」だったとは……計量テンソルの意味がすごく具体的になったわ。
🟡 リナ: ちなみに、今は平坦な空間に埋め込まれた座標系を考えているから「位置ベクトル」を使って基底を定義できたけれど、一般の曲がった空間では位置ベクトルは使えない。そのときは別の定義の仕方が必要になる——これも後の章で扱うわ。
⚪ メイ: 具体的に確認してみます。\(g_{11} = \boldsymbol{e}_r \cdot \boldsymbol{e}_r = \cos^2\theta + \sin^2\theta = 1\)、\(g_{22} = \boldsymbol{e}_\theta \cdot \boldsymbol{e}_\theta = r^2\sin^2\theta + r^2\cos^2\theta = r^2\)、\(g_{12} = \boldsymbol{e}_r \cdot \boldsymbol{e}_\theta = -r\sin\theta\cos\theta + r\sin\theta\cos\theta = 0\)。確かに一致するわ。
🟡 リナ: これが計量テンソルの幾何学的な意味よ。\(g_{ij}\) は「座標基底がどれだけ長いか、互いにどんな角度をなしているか」という情報を全て含んでいる。
✅ 理解度チェック: 計量テンソルの成分 \(g_{ij}\) と座標基底ベクトル \(\boldsymbol{e}_i\) の間にはどのような関係があるでしょうか?
答え
\(g_{ij} = \boldsymbol{e}_i \cdot \boldsymbol{e}_j\)(座標基底ベクトルどうしの内積)。対角成分 \(g_{ii}\) は基底ベクトルの長さの 2 乗、非対角成分 \(g_{ij}\)(\(i \neq j\))は基底ベクトル間の角度の情報を含む。
📝 練習問題:
- 座標基底・球面の曲率・円筒面・Rindler 座標 → 問題 B-7. 座標基底ベクトルの直交座標成分, 問題 M-5. 円筒面の計量と平坦性, 問題 M-6. 球面上の「円」の幾何学, 問題 A-1. 一般の曲線座標の計量テンソル, 問題 A-2. Rindler 座標
「ものさしが場所によって変わる」の正体¶
🟡 リナ: まとめましょう。「ものさしが場所によって変わる」とは、具体的には次のことを意味しているの:
計量テンソル \(g_{ij}\) の成分が座標の関数である——つまり、「座標値を 1 だけ変えたとき、実際にどれだけ移動するか」が場所によって異なる。
🔵 カイ: 極座標なら、\(\theta\) を 1 ラジアン変えたときの移動距離は \(r\) に比例する。原点に近ければ短く、遠ければ長い。
🟡 リナ: そう。そして §4 で見た球面の計量を思い出して。球面は 2 次元だから座標は 2 つ——\((u^1, u^2) = (\theta, \varphi)\) の順にとると \(g_{ij} = \mathrm{diag}(a^2,\; a^2\sin^2\theta)\)。ここで注意してほしいのは、§4 の 3 次元球座標では \(\varphi\) は 3 番目の座標だったから \(g_{33}\) だったけれど、今は 2 次元の球面で \(\varphi\) が 2 番目の座標だから \(g_{22}\) になるということ——添字の番号は座標の順番で決まるの。
🔵 カイ: ああ、同じ \(a^2\sin^2\theta\) でも、何番目の座標かによって \(g_{33}\) だったり \(g_{22}\) だったりするんですね。
🟡 リナ: この \(g_{22} = a^2\sin^2\theta\) は、\(\varphi\) を 1 ラジアン変えたときの移動距離が \(\sqrt{g_{22}}\cdot 1 = a\sin\theta\) であることを意味する——赤道(\(\theta = \pi/2\))で最大値 \(a\)、極(\(\theta = 0\))で 0。図 6.7「球面の計量と座標線間隔」 を見ると、赤道付近では経線の間隔が広く、極付近では狭くなっているのが分かるわね。これが \(g_{22} = a^2\sin^2\theta\) の幾何学的な意味を目で見たものよ。
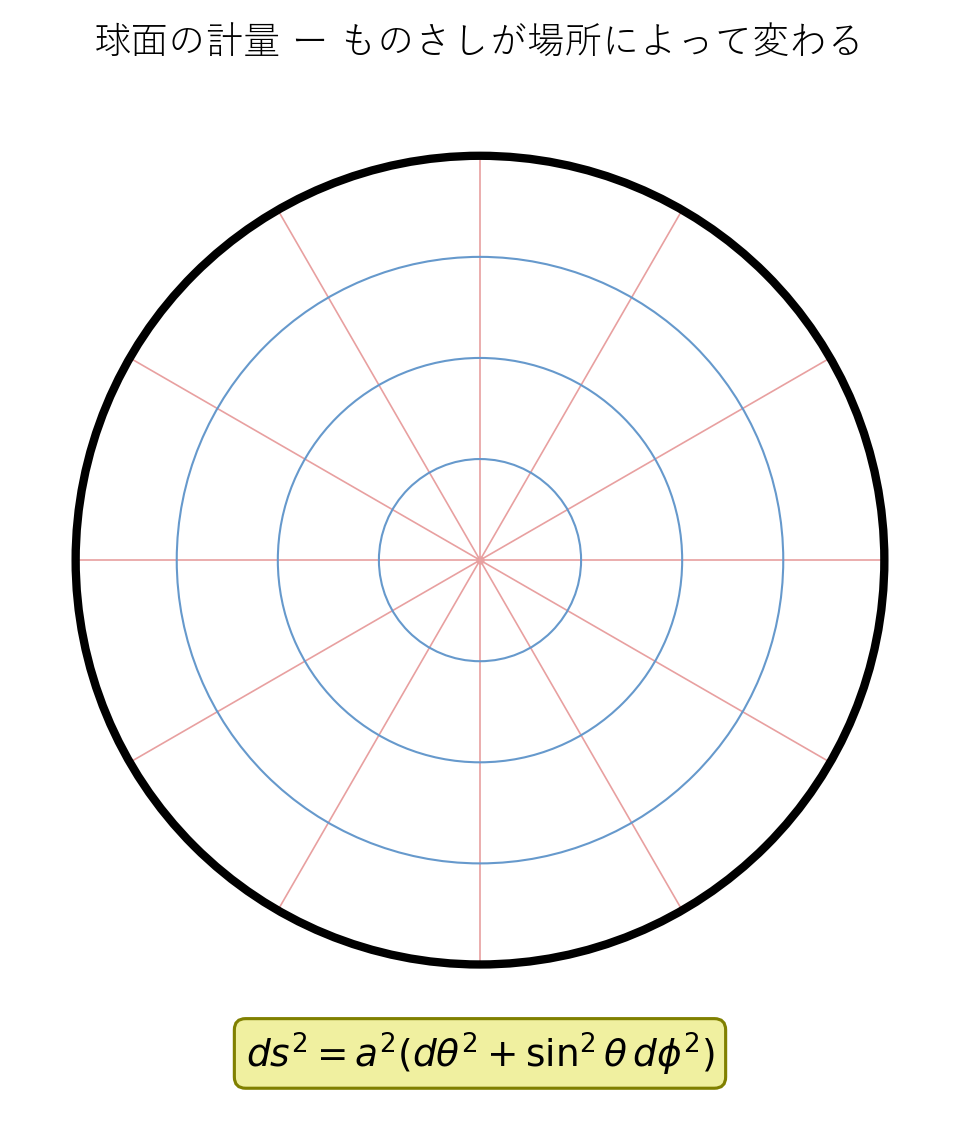
図 6.7: 球面の計量と座標線間隔。赤道付近では経線(\(\varphi\) 一定の線)の間隔が広く、極付近では狭くなる。これは \(g_{22} = a^2\sin^2\theta\) が \(\theta\) に依存することの幾何学的な表れ。
🟡 リナ: §4 の球面の計量のところで述べた大事なポイントを、座標基底の言葉で言い直しておくわね。
- 平坦な空間でも曲線座標を使えば \(g_{ij}\) は場所に依存する(例:極座標の \(g_{22} = r^2\))——でもこれは座標変換で \(\delta_{ij}\) に戻せる。座標基底の言葉では「基底ベクトルの長さや向きが場所によって変わっても、それは座標の取り方のせいであって、空間自体は歪んでいない」ということ
- 本当に曲がった空間(球面など)では、どんな座標を使っても \(g_{ij}\) を定数にすることが(全体では)できない。ただし、ごく狭い範囲——1 点のまわりの微小領域——に限れば、\(g_{ij} \approx \delta_{ij}\) にできる座標は常に見つかるの。これは「曲がった空間でも、十分小さく見れば平坦に見える」ということで、地球の表面が局所的には平らに見えるのと同じ感覚ね
⚪ メイ: つまり球面の計量を \(\delta_{ij}\) にすることは、1 点の近傍ではできるけれど全体ではできない——それが「本当に曲がっている」ことの意味ね。
✅ 理解度チェック: 計量テンソルの成分が場所に依存するだけで「空間が曲がっている」と言えるでしょうか?
答え
言えない。平坦な空間でも曲線座標を使えば計量テンソルは場所に依存する(例:極座標の \(g_{22} = r^2\))。本当に曲がっているかどうかの判定には Riemann 曲率テンソルが必要。
6.7 4 次元時空への拡張¶
🟡 リナ: 最後に、ここまでの議論を 4 次元時空に拡張しておきましょう。座標を \((x^0, x^1, x^2, x^3)\) とすると、線素(line element)は:
ここで \(\mu, \nu\) は 0 から 3 まで走る。慣習として、時空全体(0〜3)の添字にはギリシャ文字 \(\mu, \nu, \ldots\) を、空間だけ(1〜3)の添字にはラテン文字 \(i, j, \ldots\) を使うの。この章の前半で \(g_{ij}\) と書いていたのは空間成分だけを扱っていたからで、4 次元時空全体を扱うときは \(g_{\mu\nu}\) と書くわけね。\(4 \times 4\) の対称行列 \(g_{\mu\nu}\) の独立成分は \(\dfrac{4 \times 5}{2} = 10\) 個。
🔵 カイ: 特殊相対論の Minkowski 時空だと?
🟡 リナ: 直交座標 \((t, x, y, z)\) で:
つまり \(g_{\mu\nu} = \mathrm{diag}(-c^2, 1, 1, 1)\)。前の章では自然単位系(\(c = 1\))を使って座標を \((ct, x, y, z)\) にとり、\(\eta_{\mu\nu} = \mathrm{diag}(-1, 1, 1, 1)\) と書いていたわね。この章では SI 単位系に戻して \(x^0 = t\)(単位は秒)としているから、\(c^2\) が明示的に現れるの。Minkowski 時空の計量は座標の取り方によって見た目が変わるけれど、どちらも同じ平坦な時空を記述しているから本質は同じよ。
記号の約束: この章以降、一般の計量テンソルを \(g_{\mu\nu}\) と書く。Minkowski 時空もその特殊ケースとして \(g_{\mu\nu}\) で表す(前章までの \(\eta_{\mu\nu}\) は \(g_{\mu\nu}\) が Minkowski 計量であることを強調したいときに使う)。
🔵 カイ: マイナスがついてるのは Minkowski の不変量と同じ符号規約ですよね。でも前の章では \(\eta_{00} = -1\) だったのに、今は \(g_{00} = -c^2\) と数値が違う——符号は同じだけど大きさが変わったのはなぜですか?
🟡 リナ: いい質問。章の冒頭で注意したように、この章では座標を \((t, x, y, z)\)(\(x^0 = t\)、単位は秒)にとっているの——前章までの \((ct, x, y, z)\) とは違う選択ね。\(ds^2\) 全体の次元を長さの 2 乗(m²)に揃えたいから、\(dt\) の単位が秒(s)である以上、\(g_{00}\,(dt)^2\) が m² になるには \(g_{00}\) の単位が m²/s² でなければならない——だから \(g_{00} = -c^2\)(\(c\) の単位は m/s)となるのよ。もし座標を \((ct, x, y, z)\) と取れば \(ct\) の単位はすでに m だから、\(g_{\mu\nu} = \mathrm{diag}(-1, 1, 1, 1)\) と無次元で書ける——前の章で使っていた \(\eta_{\mu\nu}\) そのものね。いずれにしても全成分が定数だから、Minkowski 時空は平坦。
⚪ メイ: 座標の単位の取り方で \(-1\) にも \(-c^2\) にもなるけれど、物理的には同じ平坦な時空——極座標と直交座標の関係と同じ構造ね。
🔵 カイ: なるほど、座標の取り方で \(-1\) にも \(-c^2\) にもなるけど、本質は同じなんですね。それと、マイナス符号がつくこと自体は、前に学んだ因果構造——光円錐の内側と外側の区別——と関係しているんですか?
🟡 リナ: その通り。因果構造を守るマイナス符号が、そのまま \(g_{00}\) に現れているの。つまり計量テンソルの形が、時空の因果構造を自動的に組み込んでいるということよ。
🟡 リナ: 球座標 \((t, r, \theta, \varphi)\) に変えると:
⚪ メイ: 計量が場所に依存しているけれど、時空自体は平坦。座標の選び方を変えただけ。
表 6.2: Minkowski 時空の計量:座標による表記の違い
| 座標 | \(g_{\mu\nu}\) | 場所依存性 | 時空の曲がり |
|---|---|---|---|
| \((ct, x, y, z)\)(前章の記法) | \(\eta_{\mu\nu} = \mathrm{diag}(-1, 1, 1, 1)\) | なし(定数) | 平坦 |
| \((t, x, y, z)\)(\(c\) 明示) | \(\mathrm{diag}(-c^2, 1, 1, 1)\) | なし(定数) | 平坦 |
| \((t, r, \theta, \varphi)\) | \(\mathrm{diag}(-c^2, 1, r^2, r^2\sin^2\theta)\) | あり | 平坦 |
🟡 リナ: そう。でも次章以降で登場する Schwarzschild (シュヴァルツシルト) 計量——質量 \(M\) の球対称な天体(たとえばブラックホール)の外側の時空を記述する計量——を予告として見せておくわね。\(G\) は万有引力定数よ:
プロローグで登場した相対論的パラメータ \(GM/(Rc^2)\)(\(R\) は天体の半径)を覚えている? ここに出てくる \(2GM/(rc^2)\) の \(r\) は座標——天体の外側の任意の位置を表すもので、天体表面では \(r = R\) になるわ。係数 2 の意味は Schwarzschild 計量を正式に導入する章で明らかになる。
🔵 カイ: うわ、Minkowski 計量に比べると \(g_{00}\) と \(g_{11}\) が \(r\) に依存する項で修正されてる……質量 \(M\) がゼロなら Minkowski に戻りますね。
🟡 リナ: その通り。そしてこの計量は、どんな座標変換をしても Minkowski 計量に全体では変換できない。これが「時空が本当に曲がっている」ということなの。
🔵 カイ: 計量テンソルが「場所によって変わるものさし」で、そのものさしの変わり方の中に重力の情報が入っている……。でも、Schwarzschild 計量の式を見ると \(r = 2GM/c^2\) で分母がゼロになりますよね。そこでは「ものさし」が無限に引き伸ばされるってことですか? それとも空間が本当に壊れているんですか?
🟡 リナ: 鋭い質問ね。結論だけ先に言うと、\(r = 2GM/c^2\) での発散は座標の特異点——つまり座標の選び方が悪いだけで、時空自体は壊れていないの。別の座標を使えば滑らかに通過できるわ。まさにこの章で学んだ「座標の曲がり」と「空間の曲がり」の区別が効いてくる場面ね。それが本当に物理的な特異点なのか座標の問題なのかを判定する道具が Riemann 曲率テンソル。これは Schwarzschild 計量を詳しく学ぶ章で扱うから、楽しみにしていてね。
⚪ メイ: この章で学んだ「座標の曲がりと空間の曲がりは別」という視点がそのまま効いてくるのね。計量テンソルが一般相対論の主役だということがよく分かったわ。
🟡 リナ: そう。重力場の情報は全て \(g_{\mu\nu}\) に詰まっている。次章では、この計量テンソルを使って実際に「重力がある時空」を記述していくわ。
次章予告¶
第 7 章では、計量テンソル \(g_{\mu\nu}\) を使って実際に「重力がある時空」を記述する。この章で予告した Schwarzschild(シュヴァルツシルト)計量を正式に導入し、その各成分が何を意味するのかを読み解く。Minkowski 計量との違いから、重力による時間の遅れや空間の歪みがどう現れるかを見ていこう。
練習問題¶
📝 練習問題:
- Jacobi 行列・逆行列 → 問題 B-1. 2 次元極座標のヤコビアン, 問題 B-5. 線形座標変換の Jacobi 行列, 問題 B-8. 逆変換の Jacobi 行列の行列式
- 計量テンソルの読み取り・逆計量 → 問題 B-2. 3 次元球座標の逆計量, 問題 B-3. 一般 2 次元計量の行列表示, 問題 B-4. 球面上の特定の点での計量テンソル
- 計量テンソルの変換則・対称性 → 問題 B-6. 計量テンソルの変換則の適用, 問題 M-1. 座標変換 \((u, v)\) と計量テンソル, 問題 M-2. 球座標の線素の導出, 問題 M-3. 放物線座標の計量テンソル, 問題 M-4. 計量テンソルの対称性の証明, 問題 M-7. 計量テンソルの変換則による \(g'_{33}\) の導出
- 座標基底・球面の曲率・円筒面・Rindler 座標 → 問題 B-7. 座標基底ベクトルの直交座標成分, 問題 M-5. 円筒面の計量と平坦性, 問題 M-6. 球面上の「円」の幾何学, 問題 A-1. 一般の曲線座標の計量テンソル, 問題 A-2. Rindler 座標
参考文献¶
- 石井俊全『一般相対性理論を一歩一歩数式で理解する』(ベレ出版)第 3 章「テンソルと直線座標のテンソル場」・第 5 章「曲線座標のテンソル場」
- Lancaster, T. & Blundell, S. J., General Relativity for the Gifted Amateur, Ch. 3
- Schutz, B. F., A First Course in General Relativity, 3rd ed., Ch. 6
- Hartle, J. B., Gravity: An Introduction to Einstein's General Relativity, Ch. 2, Ch. 7
- 佐藤勝彦『相対性理論』(岩波基礎物理シリーズ)第 4 章「リーマン幾何学」
このページについてフィードバック
分からなかった箇所、誤りの指摘、改善提案などをお寄せください。