第 5 章 光速が一定なのはなぜ? — 特殊相対性理論¶
前回までのあらすじ: 第 4 章で、古典物理の 3 つの危機を見た。黒体輻射、光電効果、水星の近日点移動。特に Maxwell の方程式が予言する光速 \(c = 1/\sqrt{\mu_0 \varepsilon_0}\) には「誰から見て」という情報がなく、光速が観測者によらず一定であるという謎が残された。
この章のゴール
- 「一般相対論」編で既に整備した特殊相対論の結果を短くおさらいし、「量子重力問題への挑戦」編 特有の道具である 光錐座標 \(x^\pm\) を導入する
- 光錐座標は第 14 章の光円錐量子化の心臓部にあたる
- 数式の導出そのものは 「一般相対論」編 第 3 章〜「一般相対論」編 第 4 章 で一度きり丁寧に扱っているので、本章では要点の確認に留めて、弦理論で使う道具立てにフォーカスする
この章の読み方
「一般相対論」編 第 3 章〜「一般相対論」編 第 4 章 を読み終えている前提なので、5.1〜5.3 は既習内容の整理。ページ数は short だけど、添字記法や 4 元運動量の定義は後の章でも頻繁に使うので、自信がない項目があれば各節末の参照先に立ち戻ってほしい。光錐座標(5.4)がこの章の主役。
%%{init: {"theme": "default", "themeCSS": ".edgePath .path, .flowchart-link { stroke-width: 2px !important; }"}}%%
flowchart TD
A["「一般相対論」編 第3〜4章<br>で整備済み"] --> B["特殊相対論の要点"]
B --> C["Lorentz 変換 γ"]
B --> D["Minkowski 計量 η_μν"]
B --> E["4 元運動量 pᵘ<br>E² = |p|² + m²"]
B --> F["光錐構造<br>時間的・空間的・光的"]
F --> G["<b>光錐座標 x±</b><br>(本章の新規内容)"]
G --> H["弦理論の光円錐量子化<br>(第14章)"]
D --> I["等価原理 → 一般相対論<br>(第6章)"]図 5.1: 第 5 章の位置づけと光錐座標への道筋
5.1 動機の再確認 — 16 歳の Einstein と光速の謎¶
🟡 リナ: 第 2 章で Maxwell の方程式から \(c = 1/\sqrt{\mu_0\varepsilon_0}\) が導かれた。そして第 4 章で、この \(c\) に「誰から見た速さか」という情報がないことが謎として残ったわね。
🔵 カイ: Einstein が 16 歳のときに「光と同じ速さで走ったら光は止まって見えるのか?」と悩んだやつですよね。
🟡 リナ: そう。Maxwell の方程式には「静止した電磁波」の解は存在しないから、光と並走すること自体が不可能だと Einstein は結論づけた。1887 年の Michelson-Morley 実験から現代のレーザー共振器実験(\(10^{-18}\) の等方性)まで、光速は観測者によらず一定という事実は極めて堅い。
⚪ メイ: 「一般相対論」編 第 3 章 でやったけど、Einstein は「なぜ一定か」を説明したのではなく、「一定である」ことを出発点として受け入れたんだったわね。
🟡 リナ: その通り。公理として据えて、そこから何が論理的に導かれるかを追求した——それが特殊相対性理論。この先は 「一般相対論」編 第 3 章 で丁寧に扱ったから、ここでは結果だけ確認しましょう。
✅ 理解度チェック: Einstein は光速が一定であることを「説明」したのか、それとも別のアプローチを取ったのでしょうか?
答え
Einstein は光速が一定である理由を説明したのではなく、「光速は観測者によらず一定である」ことを公理(出発点)として受け入れた。そこから何が論理的に導かれるかを追求したのが特殊相対性理論である。
📖 「一般相対論」編との接続: 光速不変の実験的基盤、Einstein の着想、Michelson-Morley 実験の詳細は 「一般相対論」編 第 3 章 で扱った。光速不変が「\(ds^2\) の形を決める」論理は 「一般相対論」編 第 3 章 を参照。
5.2 特殊相対論の要点サマリ¶
🟡 リナ: 「一般相対論」編 第 3 章 で導出した結果を、弦理論で使う道具として手元に並べておきましょう。導出過程は参照先に任せて、ここは「何が使えるか」の棚卸しよ。
二つの公理(「一般相対論」編 第 3 章)¶
- 相対性原理:物理法則はすべての慣性系で同じ形をとる
- 光速不変の原理:真空中の光速 \(c\) は光源や観測者の運動によらず一定
Lorentz 変換(「一般相対論」編 第 3 章)¶
慣性系 \(S\) と、\(S\) に対して \(x\) 方向に速度 \(v\) で動く \(S'\) の間の座標変換:
ここで Lorentz 因子は
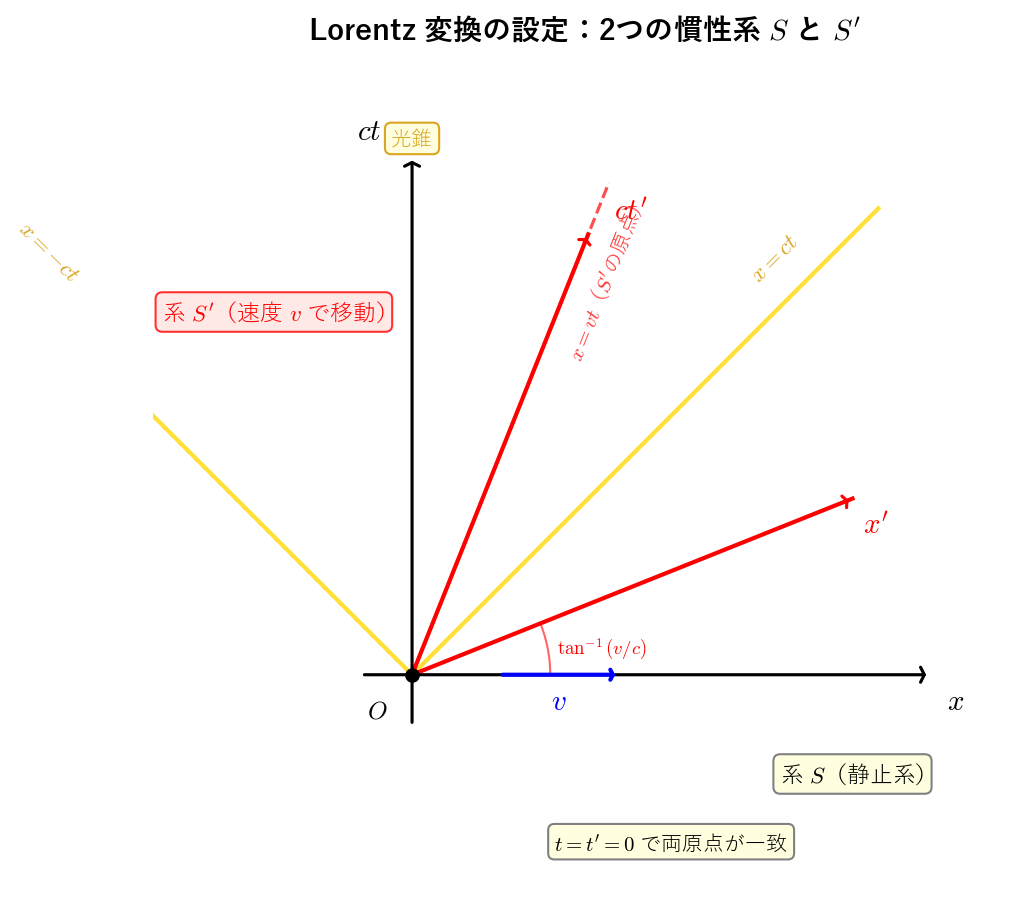
図 5.2: Lorentz 変換の時空図。慣性系 \(S\) の座標軸(黒)と、速度 \(v\) で動く \(S'\) の座標軸(青)。\(S'\) の時間軸と空間軸が対称に傾き、光の世界線 \(x = ct\) はどちらの系でも 45° を保つ。
\(v \ll c\) で \(\gamma \approx 1\)、Galilei 変換に戻る。\(v \to c\) で \(\gamma\) は発散する——図 5.3「ローレンツ因子γの速度依存性」 を見ると、日常的な速度ではほぼ 1 だけど光速に近づくと急激に跳ね上がるのが分かるわ。幾何学的にはラピディティ \(\varphi\)(\(\tanh\varphi = v/c\))を用いて \(t\)-\(x\) 平面の双曲線回転として書ける(詳細は 「一般相対論」編 第 3 章 参照)。
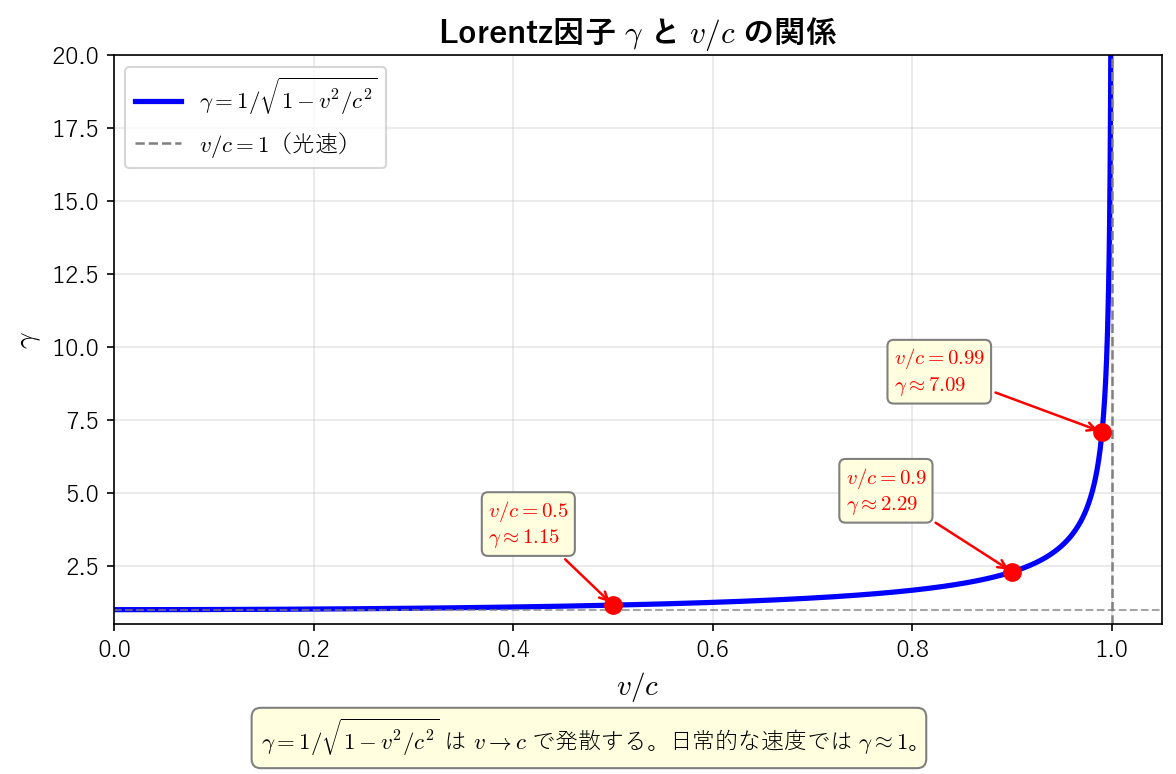
図 5.3: ローレンツ因子γの速度依存性。\(\gamma = 1/\sqrt{1-v^2/c^2}\) は \(v \to c\) で発散する。日常的な速度では \(\gamma \approx 1\)。
物理的帰結(「一般相対論」編 第 3 章)¶
表 5.1: Lorentz変換の主な物理的帰結
| 現象 | 式 | 意味 |
|---|---|---|
| 同時性の相対性 | \(\Delta t' = -\gamma(v/c^2)\Delta x\)(\(\Delta t = 0\) のとき) | \(S\) で同時・離れた 2 事象は \(S'\) では同時でない |
| 時間の遅れ | \(\Delta t = \gamma\,\Delta t'\) | 動く時計はゆっくり進む |
| 長さの収縮 | \(L = L_0/\gamma\) | 動く棒は運動方向に縮んで見える |
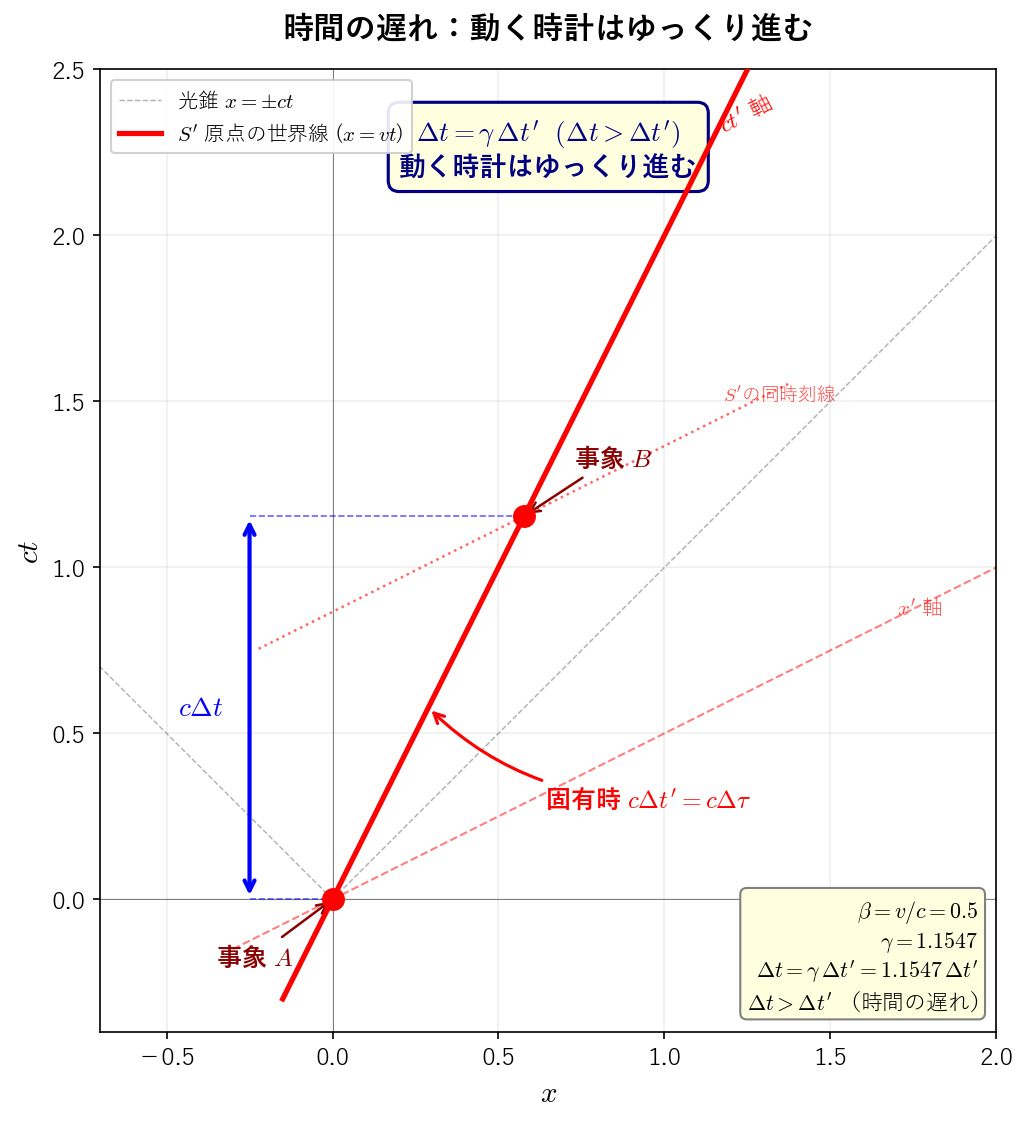
図 5.4: 時間の遅れ。動いている系 \(S'\) の時計が刻む固有時間 \(\Delta t'\) は、静止系 \(S\) で観測すると \(\Delta t = \gamma\,\Delta t' > \Delta t'\) に引き延ばされる。速度が光速に近づくほど遅れが顕著になる。
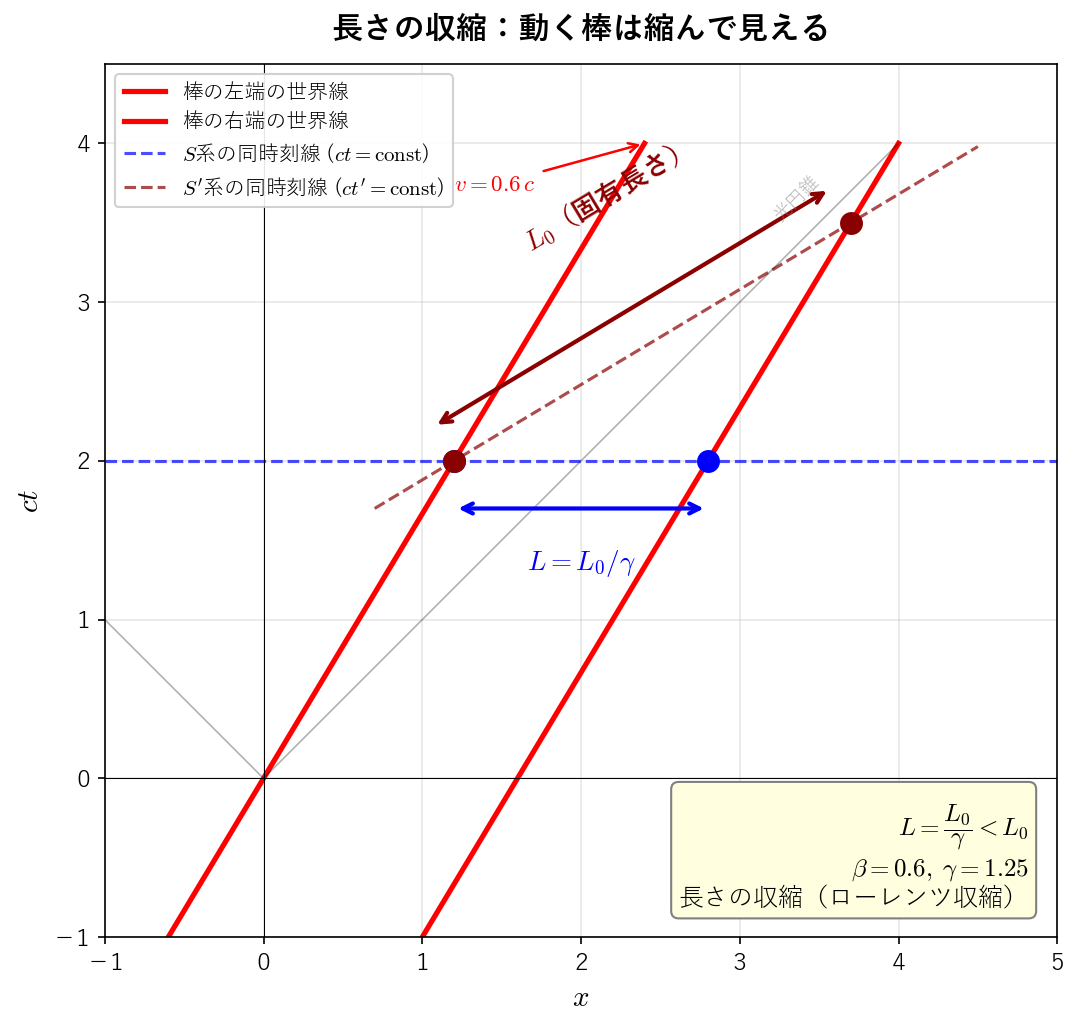
図 5.5: 長さの収縮。静止系で長さ \(L_0\) の棒が、速度 \(v\) で運動しているとき \(L = L_0/\gamma < L_0\) に縮んで観測される。収縮は運動方向にのみ起きる。
🔵 カイ: 「\(S\) から見て \(S'\) の時計が遅れるなら、\(S'\) から見ても \(S\) の時計が遅れるはず」——双子のパラドックスですよね。お互いに「相手が遅れている」と言い合うなら、結局どっちが若いんですか?
🟡 リナ: ロケットに乗った方が若い、で決着するの。加速を経験する側が慣性系を乗り換えるから、二人の対称性が破れるのよ。詳細は 「一般相対論」編 第 3 章 の Dive Deep 参照。ミュオンの寿命、GPS の時刻補正もそこで扱ったわ。
🔵 カイ: 加速した瞬間に対称性が破れる……。じゃあ「加速の大きさ」や「加速している時間」で、どれだけ歳の差がつくか変わるんですか?
🟡 リナ: その通り。固有時間の差は経路全体の積分で決まるの。同じ出発点と到着点でも、途中で激しく加速したルートと穏やかなルートで歳の差が変わる。定量的な計算は 「一般相対論」編 第 3 章 の Dive Deep で扱っているから、気になったら見てみて。
🔵 カイ: 「経路全体の積分」って、要するに加速の仕方を全部足し合わせて比べるってことですか。
⚪ メイ: つまり「どちらも対等」に見えるのは、両方が慣性系にいる間だけ。片方が加速した時点で状況が非対称になるのね。
✅ 理解度チェック: 双子のパラドックスで「ロケットに乗った方が若い」と決着がつくのはなぜでしょうか?
答え
ロケットに乗った方は加速(減速・方向転換)を経験し、慣性系を乗り換える。これにより二人の状況の対称性が破れるため、加速を経験した側の経過時間が短くなり、若いままとなる。
5.3 Minkowski 時空の道具(弦理論で使うもの)¶
🟡 リナ: 弦理論では 4 次元に限らず、もっと多くの次元を持つ時空を扱うことになる(なぜ次元が増えるかは第 14 章以降で明らかになるわ)。まず最も単純な場合として、弦が動く背景時空を \(D\) 次元の平坦な Minkowski 時空に取るの。曲がった時空でも各点の近傍は Minkowski 時空で近似できるから(局所平坦性の定理、「一般相対論」編 第 7 章 参照)、ここで整備する道具は最後まで使い続ける。この節では具体的な式を 4 次元(\(D = 4\))で書くけれど、\(D\) 次元への一般化は簡単よ——座標が \(x^0, x^1, \ldots, x^{D-1}\) に増えるだけで、光錐座標では横方向の成分が \(x^2, x^3, \ldots, x^{D-1}\) の \(D - 2\) 個になるの。要点を並べるわね。
単位系と符号規約
ここから本節以降は \(c = 1\) の自然単位系を基本にする(「一般相対論」編 第 4 章 参照)。時間と空間を同じ単位で測り、式の中に \(c\) を明示的に書かない。弦理論では追加で \(\hbar = \alpha' = 1\) も取ることが多いけれど、それは必要になってから導入する。SI 単位の数値が必要なときは次元解析で \(c\) を復元する。
符号規約は 「一般相対論」編 と同じ \(\eta_{\mu\nu} = \mathrm{diag}(-1, +1, +1, +1)\)(mostly plus)を採用する。「場の量子論」編 では \((+,-,-,-)\)(mostly minus)を使ったが、弦理論の標準的な教科書(Zwiebach, Polchinski など)は mostly plus を採用しているため、本編ではこちらに統一する。
座標と添字(「一般相対論」編 第 4 章)¶
Einstein の縮約規則:上下に同じ添字が出たら和をとる。\(A^\mu B_\mu \equiv \sum_\mu A^\mu B_\mu\)。
Minkowski 計量(「一般相対論」編 第 4 章)¶
すべての慣性系で同じ成分をとる不変量。\(c\) を復元すれば \(ds^2 = -c^2 dt^2 + dx^2 + dy^2 + dz^2\)。
4 元運動量とエネルギー・運動量関係(「一般相対論」編 第 4 章)¶
粒子の 4 元運動量(\(U^\mu\) は 4 元速度、「一般相対論」編 第 4 章 参照):
不変ノルム \(p^\mu p_\mu = -m^2\) から、エネルギー・運動量関係は
(なぜ \(-m^2\) とマイナスがつくかというと、\(p^\mu p_\mu = \eta_{\mu\nu}p^\mu p^\nu = -E^2 + |\vec{p}|^2\) で、\(\eta_{00} = -1\) のせいでエネルギーの項にマイナスがつくから。静止粒子 \(\vec{p} = 0\) で \(p^\mu p_\mu = -E^2 = -m^2\) となり整合する。)
- 静止時:\(E = m\)(SI 単位に戻せば \(E = mc^2\))
- 低速極限:\(E \approx m + \frac{1}{2}m v^2\)(SI に戻せば \(E \approx mc^2 + \frac{1}{2}mv^2\)、展開計算は 「一般相対論」編 第 4 章 を参照)
- 質量ゼロ:\(E = |\vec{p}|\)、必ず光速で運動する
🔵 カイ: 静止してるだけでエネルギー \(m\) を持ってるって、改めてすごい関係ですね。
🟡 リナ: この関係を図にすると、双曲線になるわ(図 5.6「エネルギー・運動量関係 \(E^2 = p^2 + m^2\) の幾何学的表現」)。\(E^2 - |\vec{p}|^2 = m^2\) を満たす点の集まりが双曲線を描くの。粒子は必ずこの曲線の上にいるから、「粒子が乗っている殻」という意味で質量殻(mass shell)と呼ばれる。質量ゼロの光は直線 \(E = |p|\) の上に乗り、質量がある粒子は双曲線の上に乗る。
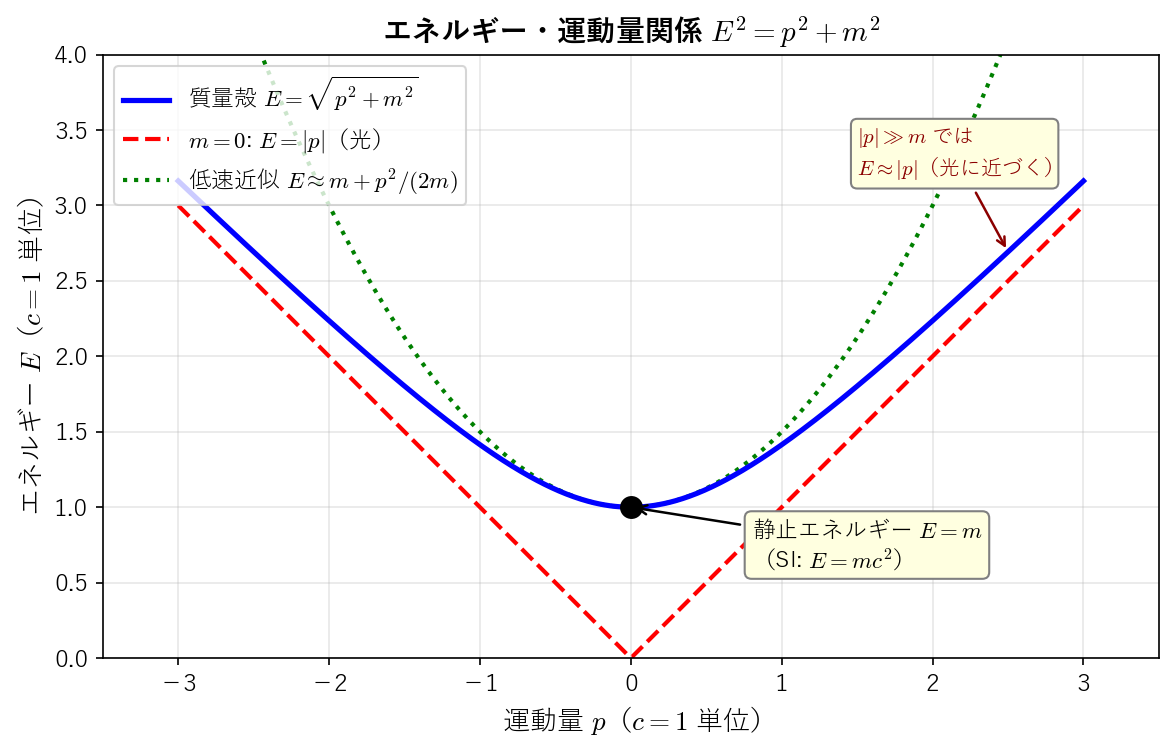
図 5.6: エネルギー・運動量関係 \(E^2 = p^2 + m^2\) の幾何学的表現。質量殻(双曲線)の上に粒子が乗り、\(m = 0\) の光は直線 \(E = |p|\) に一致する。低速では放物線近似(Newton 力学の運動エネルギー)に帰着する。
✅ 理解度チェック: \(E^2 = |\vec{p}|^2 + m^2\)(\(c=1\))において、粒子が静止しているとき(\(\vec{p}=0\))のエネルギーは何でしょうか?
答え
\(E = m\)(\(c=1\) の自然単位系)。SI単位に戻せば \(E = mc^2\) となる。これが有名な質量とエネルギーの等価関係である。
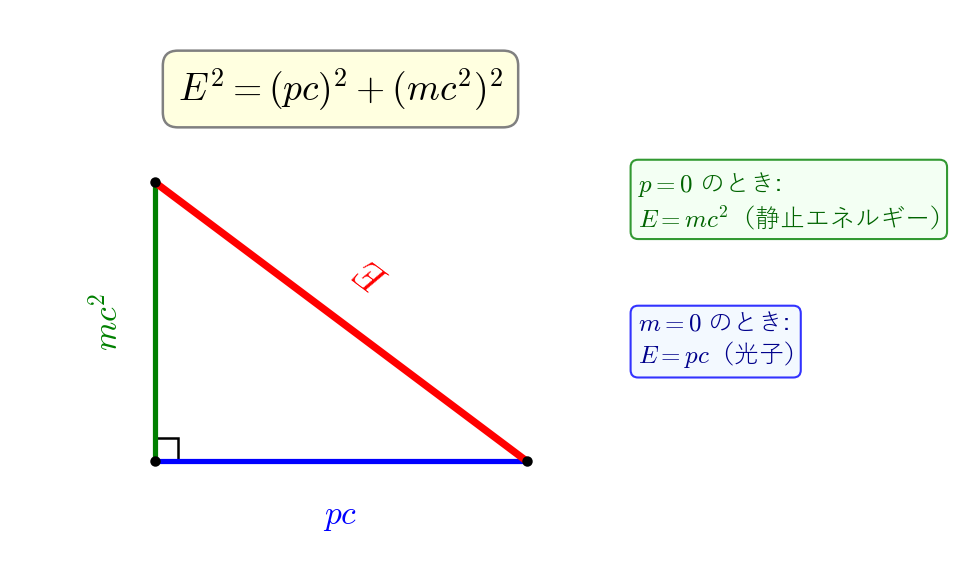
図 5.7: エネルギー・運動量の三角関係。\(E^2 = |\vec{p}|^2 + m^2\)(\(c = 1\))は直角三角形の三平方の定理として視覚化できる。静止エネルギー \(m\) を底辺、運動量 \(|\vec{p}|\) を高さとしたとき、斜辺が全エネルギー \(E\) に対応する。
🔵 カイ: 質量ゼロで光速という性質、弦理論で重力子が出てきたとき(第 15 章)にまた使うやつですよね。でも \(E = \sqrt{|\vec{p}|^2 + m^2}\) って平方根があるから、量子化するとき扱いにくそうじゃないですか?
🟡 リナ: まさにそこが問題なの。次節では、このエネルギー・運動量関係が 1 次方程式として解ける座標——光錐座標——を導入するわ。そのおかげで \(p^-\) が他の成分から一意に決まって、弦の量子化が劇的に楽になるの。
🔵 カイ: 平方根ってことは \(E = \pm\sqrt{|\vec{p}|^2 + m^2}\) でマイナスの解もありますよね? エネルギーが負ってどういう意味ですか?
🟡 リナ: いい質問。数学的には \(p^0 = -\sqrt{|\vec{p}|^2 + m^2}\) という解が存在するの。物理的な解釈は場の量子論(「場の量子論」編)で反粒子として理解されるけれど、今は「平方根を取ると \(\pm\) の 2 つの解が出てしまう」という数学的な不便さだけ覚えておいて。光錐座標ではこの \(\pm\) が消えるのがポイントよ。
📖 既習項目への立ち返り: 反変・共変ベクトルの区別、添字の上げ下げ \(A_\mu = \eta_{\mu\nu}A^\nu\)、テンソルの縮約と階数については 「一般相対論」編 第 4 章 を参照。第 13 章以降で弦の世界面上のテンソルを扱うときに、そこでの記法を自然に引き継ぐ。
5.4 光錐構造と光錐座標 — 弦理論の主役¶
🟡 リナ: ここから本章の独自内容。光錐座標は、弦の量子化(第 14 章)で「どの自由度が物理的か」を最速で切り分けるための鍵となる道具よ。まずは下ごしらえとして光錐構造(因果律)を短く復習してから、光錐座標を定義していくわね。
光錐構造(因果律)の復習¶
🟡 リナ: 2 つの事象の間の \(ds^2\) の符号で、事象の因果関係が 3 種類に分類される。
表 5.2: 事象間隔の符号による因果分類
| \(ds^2\) の符号 | 名称 | 物理的意味 |
|---|---|---|
| \(ds^2 < 0\) | 時間的(timelike) | 光速以下の信号で結べる。因果関係あり |
| \(ds^2 = 0\) | 光的(null / lightlike) | 光で結べる。光錐の上 |
| \(ds^2 > 0\) | 空間的(spacelike) | 光でも結べない。因果関係なし |
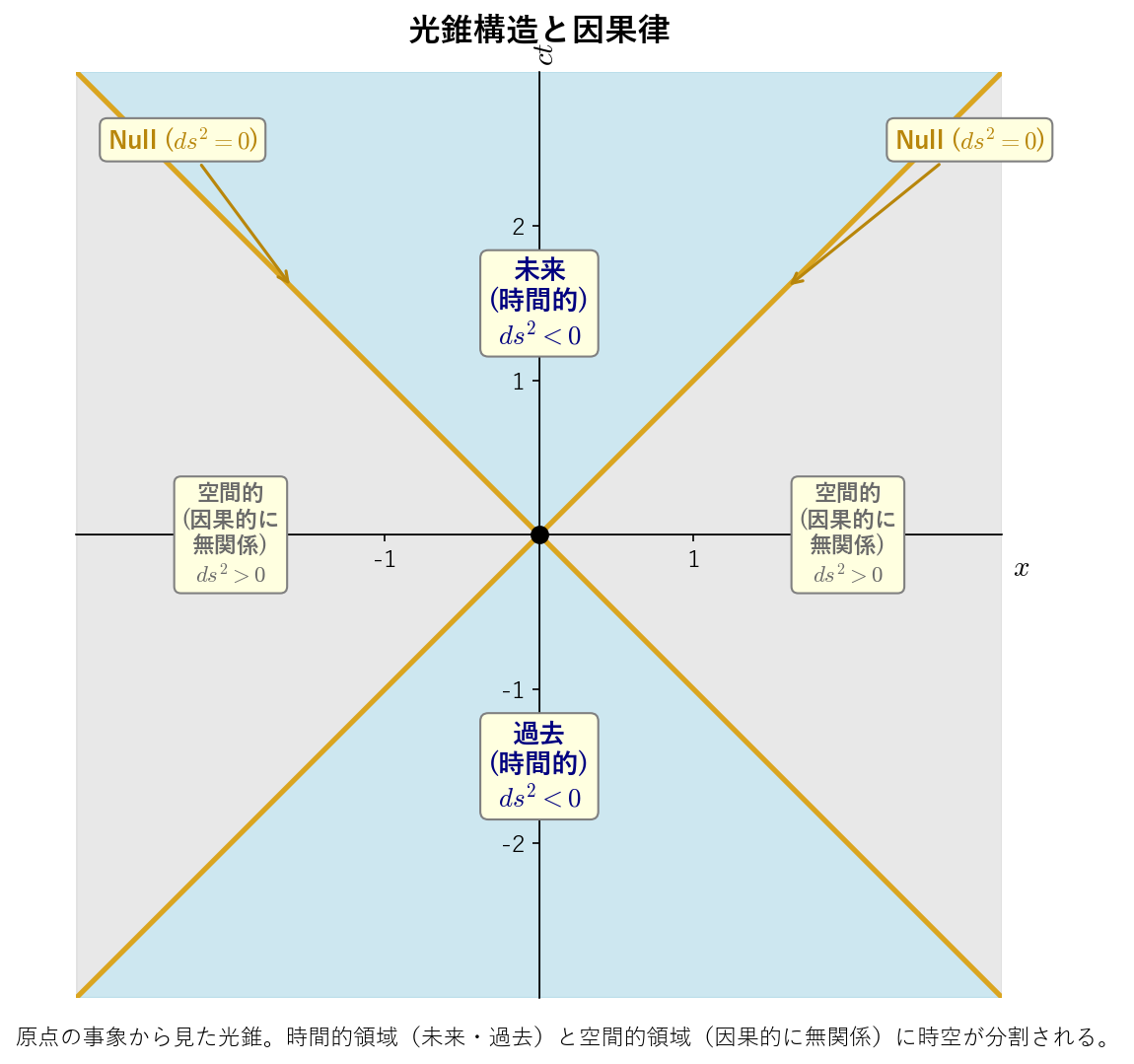
図 5.8: 光錐構造と因果律。原点の事象から見た光錐。時間的領域(未来・過去)と空間的領域(因果的に無関係)に時空が分割される。
\(ds^2 = 0\) の面が光錐(light cone)を形成し、時空を過去・未来・因果的に無関係な領域に分ける(図 5.8「光錐構造と因果律」)。詳細は 「一般相対論」編 第 3 章 の「時空間隔の 3 分類」を参照。
光錐座標の定義¶
🟡 リナ: 時間座標 \(x^0\) と空間座標の一つ \(x^1\) を組み合わせて、新しい座標を定義するわ:
残りの座標 \(x^2, x^3\) はそのまま。
🔵 カイ: なぜ「光錐」座標と呼ぶんですか?
🟡 リナ: 原点を出発して \(x^1\) 方向だけに進む光を考えると \(dx^2 = dx^3 = 0\) で、\(ds^2 = 0\) から \(-(dx^0)^2 + (dx^1)^2 = 0\)、つまり \(dx^0 = \pm dx^1\)。正方向に進む光は \(dx^0 = dx^1\) を満たすから、積分すると \(x^0 = x^1 + C\)(\(C\) は定数)。原点出発なら \(C = 0\) で \(x^1 = x^0\)(\(c = 1\) の自然単位系)。このとき
逆方向の光は \(x^1 = -x^0\) で \(x^+ = \frac{1}{\sqrt{2}}(x^0 + x^1) = 0\)。つまり原点から出た光の世界線に沿って \(x^+\) または \(x^-\) が一定値(0)を取る。
⚪ メイ: 原点出発の場合は 0 になるけど、原点以外から出発する光でも同じことが言えるの?
🟡 リナ: いい確認ね。\(x^1\) 方向に進む光は常に \(dx^0 = \pm dx^1\) を満たすから、\(dx^- = \frac{1}{\sqrt{2}}(dx^0 - dx^1) = 0\)(正方向)または \(dx^+ = 0\)(逆方向)。つまり光の世界線に沿って \(x^+\) か \(x^-\) のどちらかが定数になるの(定数値は 0 とは限らないけれど、変化しない)。ところで、さっき 図 5.8「光錐構造と因果律」 で見たように、光錐は文字通り「円錐」の形をしているわよね——原点から光が全方向に広がっていく様子を時空図に描くと、円錐の表面になる。その円錐の頂点から表面に沿って引ける直線一本一本を母線(ぼせん)と呼ぶの。
🔵 カイ: 母線? 聞いたことあるような……円錐の表面を作っている直線のことですか?
🟡 リナ: そう。母線(ぼせん)というのは、円錐の表面を構成する直線のこと——頂点から表面に沿ってまっすぐ引ける線よ。アイスクリームのコーンの尖った先端から縁に向かって定規を当てたときの直線をイメージして。光錐も円錐の一種だから、頂点(原点の事象)から光が進む方向に引いた直線が光錐の母線にあたるの。光錐の母線に沿った座標だから「光錐座標」なの。図で見ると分かりやすいわ(図 5.9「光錐座標の幾何学的意味」)——通常の \((x^0, x^1)\) 座標を 45 度回転させた形になっていて、光の世界線がそのまま新しい座標軸に一致しているでしょう。
🔵 カイ: コーンの表面に定規を当てた直線……なるほど、円錐の「骨組み」みたいなものですね。光の軌跡がその骨組みの一本一本に対応していると。じゃあ \(x^+\) 軸と \(x^-\) 軸は、その骨組みのうち特に \(x^1\) 方向の正と負に進む光の 2 本を選んだってことですか?
🟡 リナ: その通り。光錐には全方向の母線があるけれど、\(x^1\) 方向に注目して 2 本を選び、それを新しい座標軸にしたのが光錐座標よ。
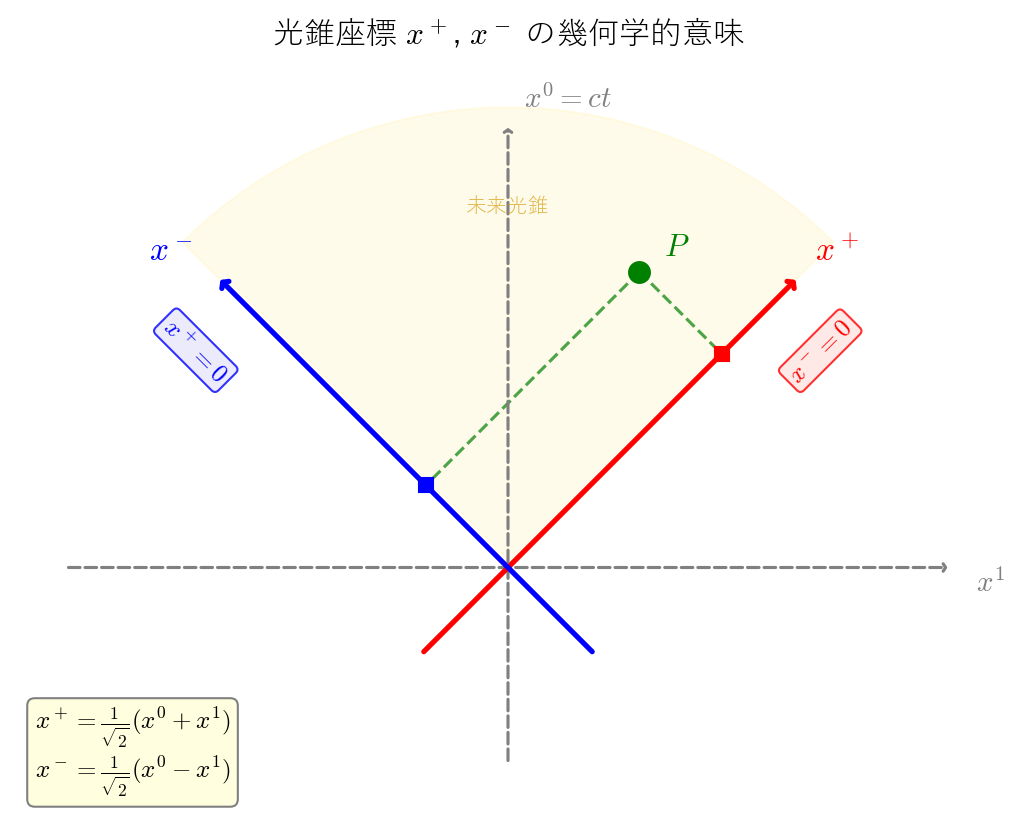
図 5.9: 光錐座標の幾何学的意味。通常の \((x^0, x^1)\) 座標を 45 度回転させた座標系。光の世界線が座標軸に一致する。
🔵 カイ: あ、図 5.9「光錐座標の幾何学的意味」 を見ると、たしかに \(x^+\) 軸と \(x^-\) 軸が光の方向に沿ってますね。
🔵 カイ: 係数 \(1/\sqrt{2}\) がついてるのはなぜですか? \(x^+ = x^0 + x^1\) じゃダメなんですか?
🟡 リナ: いい質問。もし \(1/\sqrt{2}\) をつけずに \(\tilde{x}^+ = x^0 + x^1\), \(\tilde{x}^- = x^0 - x^1\) と定義すると、\(d\tilde{x}^+ d\tilde{x}^- = (dx^0)^2 - (dx^1)^2\) だから \(ds^2 = -d\tilde{x}^+ d\tilde{x}^- + (dx^2)^2 + (dx^3)^2\) となる。ここで \(ds^2 = \tilde{\eta}_{\mu\nu}\,d\tilde{x}^\mu d\tilde{x}^\nu\) と書いたとき、Einstein の縮約規則で \(\mu\) と \(\nu\) の全組み合わせについて和をとるのよね。
🔵 カイ: 「全組み合わせ」って、具体的にどう展開されるんですか?
🟡 リナ: たとえば座標が \((\tilde{x}^+, \tilde{x}^-, \tilde{x}^2, \tilde{x}^3)\) の 4 つだから、\(\mu\) を \(+, -, 2, 3\) のどれか、\(\nu\) も \(+, -, 2, 3\) のどれか、全部で \(4 \times 4 = 16\) 通りの項を足し上げるの。その中で \(+\) と \(-\) が絡む項を拾うと、\(\mu = +, \nu = -\) の項と \(\mu = -, \nu = +\) の項の 2 つが出てくるわ。
🔵 カイ: 2 つ出てくるのは、\(\mu\) と \(\nu\) を独立に走らせるからですね。
🟡 リナ: そう。つまり \(\tilde{\eta}_{+-}d\tilde{x}^+ d\tilde{x}^- + \tilde{\eta}_{-+}d\tilde{x}^- d\tilde{x}^+\) の 2 項が出る。計量テンソルは対称(\(\tilde{\eta}_{+-} = \tilde{\eta}_{-+}\))で、\(d\tilde{x}^+ d\tilde{x}^-\) と \(d\tilde{x}^- d\tilde{x}^+\) は同じもの(ただの数の積だから順序を入れ替えても同じ)なので、合わせて \(2\tilde{\eta}_{+-}\,d\tilde{x}^+ d\tilde{x}^-\) になる。これが \(-d\tilde{x}^+ d\tilde{x}^-\) に等しいから、\(2\tilde{\eta}_{+-} = -1\) つまり \(\tilde{\eta}_{+-} = -1/2\) になるの。
🔵 カイ: \(-1/2\) って確かに中途半端ですね。\(1/\sqrt{2}\) をつけるとどうなるんですか?
🟡 リナ: \(1/\sqrt{2}\) をつけた定義では——すぐ次で導出するけれど——\(ds^2 = -2\,dx^+ dx^- + \cdots\) になる。このとき光錐座標での計量成分を \(\hat{\eta}_{\mu\nu}\) と書くことにするわ。同じ Minkowski 計量でも座標が変わると成分の数値が変わるから、通常座標の \(\eta_{\mu\nu} = \mathrm{diag}(-1,+1,+1,+1)\) と区別するためにハット(\(\hat{}\))をつけるの。さっきと同じ展開をすると、\(\hat{\eta}_{\mu\nu}\,dx^\mu dx^\nu\) の中で \(+\) と \(-\) が絡む項は \(2\hat{\eta}_{+-}\,dx^+dx^-\) になる。これが \(-2\,dx^+dx^-\) に等しいので \(2\hat{\eta}_{+-} = -2\)、つまり \(\hat{\eta}_{+-} = -1\) ちょうどに揃うの。
⚪ メイ: まとめると:\(1/\sqrt{2}\) なしだと \(\tilde{\eta}_{+-} = -1/2\) で半端、\(1/\sqrt{2}\) ありだと \(\hat{\eta}_{+-} = -1\) できれいに揃うのね。
🟡 リナ: その通り。計量成分が \(\pm 1\) か \(0\) だけになるから、添字の上げ下げが楽になるのよ。行列の全体像はすぐ下で書き出すわね。では \(ds^2 = -2\,dx^+dx^-\) を実際に導出してみましょう。
光錐座標での時空間隔¶
🟡 リナ: \(ds^2\) を光錐座標で書き直してみましょう。出発点は通常座標での Minkowski 計量:
この中の \(-(dx^0)^2 + (dx^1)^2\) の部分を光錐座標に置き換えたい。定義から
積を計算すると
すなわち \((dx^0)^2 - (dx^1)^2 = 2\,dx^+ dx^-\)。\(ds^2\) に現れるのは符号が逆の \(-(dx^0)^2 + (dx^1)^2\) だから、両辺に \(-1\) をかけて
これを \(ds^2\) に代入すると
(ここで \((dx^2)^2\) は「座標 \(x^2\) の微小変化 \(dx^2\) の 2 乗」という意味。上付きの 2 は座標のラベルであって冪乗ではないから、紛らわしいけれど \((dx^2)^2 = (dx^2) \times (dx^2)\) と読んでね。\((dx^3)^2\) も同様。)
🔵 カイ: あれ、もとの式では \((dx^0)^2\) と \((dx^1)^2\) が別々に出てたのに、光錐座標だと \(dx^+\) と \(dx^-\) の積になってる。二乗の和じゃなくて積って、感覚的にどう違うんですか?
🟡 リナ: いい疑問ね。二乗の和だと各方向が独立に効くけど、積だと片方がゼロなら全体がゼロになるの。つまり片方の座標が変化しなければ、その項は丸ごと消える。たとえば \(x^+\) 方向だけに動く(\(dx^- = 0\), \(dx^2 = dx^3 = 0\))と \(ds^2 = -2\,dx^+\cdot 0 + 0 + 0 = 0\) になる。\(ds^2 = 0\) は光の条件だから、光の世界線が \(x^+\) 軸に乗るというさっきの話と整合しているわね。
🔵 カイ: あ、そうか。通常座標だと \(ds^2 = 0\) を満たす条件を見つけるのに「\(-(dx^0)^2 + (dx^1)^2 = 0\) だから \(dx^0 = \pm dx^1\)」って計算が要るけど、光錐座標なら「\(dx^-\) がゼロ」って一発で言えるんですね。
⚪ メイ: そう、積の構造だからこそ「片方の座標が一定=光」という対応が直接見えるのね。
🟡 リナ: さっきの \(1/\sqrt{2}\) の議論で先に使ってしまったけれど、改めて整理するわね。大事なことを先に言っておくと、物理的な時空は同じ Minkowski 時空——変わったのは座標の取り方だけよ。でも座標が変わると計量テンソルの「成分の数値」が変わるの(地図の描き方を変えると緯線・経線の間隔が変わるのと同じ)。混同を避けるために、光錐座標で表した成分を \(\hat{\eta}_{\mu\nu}\) と書くことにするわ(ハットは「光錐座標での表示」という目印であって、別の計量ではない)。通常座標の \(\eta_{\mu\nu} = \mathrm{diag}(-1,+1,+1,+1)\) と数値が違うから区別しているだけよ。ここで一つ注意——光錐座標では座標が \((x^+, x^-, x^2, x^3)\) だから、添字 \(\mu\) が取る値も \(0, 1, 2, 3\) ではなく \(+, -, 2, 3\) の 4 つになるの。さっき \(x^+, x^-\) を定義したときから暗黙に使っていたけれど、ここで明示しておくわね。記号が変わるだけで「4 つの方向を区別するラベル」という役割は同じよ。
🔵 カイ: なるほど、添字のラベルが数字から \(+, -\) に変わるだけで、4 方向あるという本質は同じなんですね。
🟡 リナ: そう。行と列の順序を \(+, -, 2, 3\) にとると:
左の行列で各成分の位置を確認してね。たとえば 1 行目・2 列目が \(\hat{\eta}_{+-}\) で、右の行列を見ると値は \(-1\)。対角成分 \(\hat{\eta}_{++}\) と \(\hat{\eta}_{--}\) がゼロで、非対角成分 \(\hat{\eta}_{+-} = \hat{\eta}_{-+} = -1\) が残る。Minkowski 計量で「時間だけマイナス、空間はプラス」だったのが、ここでは \(+\) と \(-\) の組み合わせに一括されている。
⚪ メイ: 対角に \(-1\) があったのが、非対角に移動した感じね。見慣れない形だけど成分が \(0, \pm 1\) だけなのは確かにすっきりしてるわ。
🟡 リナ: 逆計量(添字を上げるときに使う行列)\(\hat{\eta}^{\mu\nu}\) は、\(\hat{\eta}^{\mu\alpha}\hat{\eta}_{\alpha\nu} = \delta^\mu_\nu\) を満たすように決まるの。この場合は成分の数値が \(\hat{\eta}_{\mu\nu}\) と同じになる:\(\hat{\eta}^{+-} = \hat{\eta}^{-+} = -1\), \(\hat{\eta}^{22} = \hat{\eta}^{33} = +1\), 他は 0。なぜ同じになるかというと、上の行列を 2 回掛けると単位行列になるから(自分自身が逆行列)。確認は練習問題に回すわね。
光錐座標での 4 元運動量¶
🟡 リナ: 光錐座標では 4 元運動量の成分も
となる(図 5.10「光錐座標での運動量の分解」)。通常の \((p^0, p^1)\) 平面で見ると、\(p^+\) 軸と \(p^-\) 軸は光錐の母線方向——つまり 45 度傾いた方向——に対応しているわ。図の双曲線が質量殻で、粒子は必ずこの上にいる。光錐座標で見ると、\(p^+\) の値を決めれば双曲線上の点が一意に定まる——つまり \(p^-\) は従属変数として決まるの。
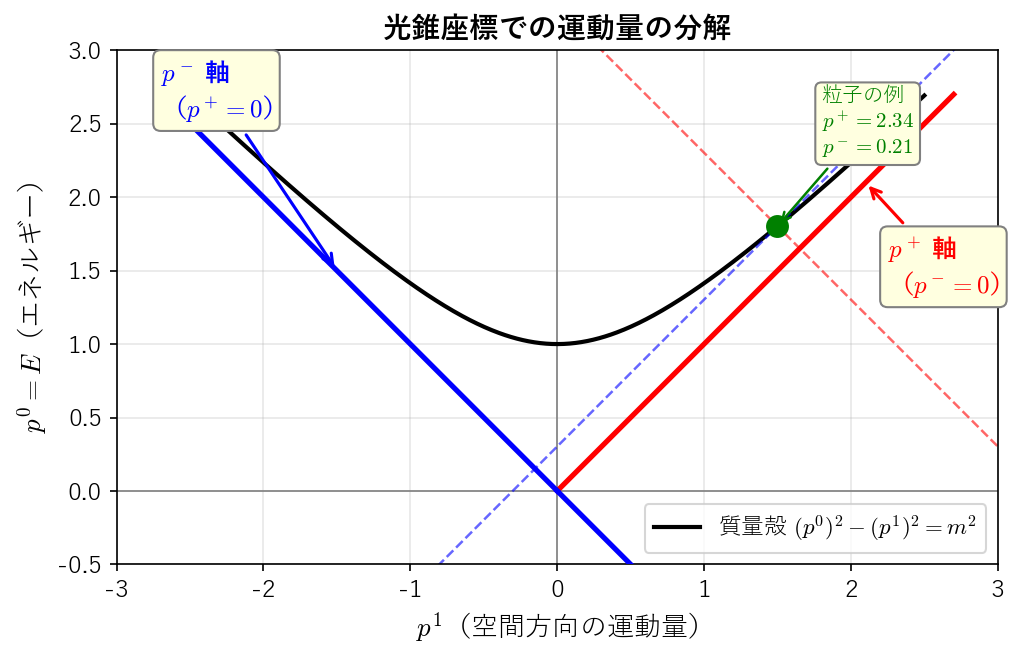
図 5.10: 光錐座標での運動量の分解。通常の \((p^0, p^1)\) 面に \(p^+\) 軸と \(p^-\) 軸を重ねて描いた。質量殻(双曲線)上の粒子に対して、\(p^-\) は \(p^+\) と横運動量から一意に決まる。
🟡 リナ: そして \(p^\mu p_\mu = -m^2\) を光錐座標で書いてみましょう。やることは先ほど \(ds^2\) で \((dx^0)^2 - (dx^1)^2 = 2\,dx^+dx^-\) を示したのと全く同じ代数よ。通常座標では \(p_\mu = \eta_{\mu\nu}p^\nu\) で添字を下ろすから(「一般相対論」編 第 4 章 参照)、\(p^\mu p_\mu = \eta_{\mu\nu}p^\mu p^\nu = -(p^0)^2 + (p^1)^2 + (p^2)^2 + (p^3)^2\) だったわね。光錐座標でも同じ仕組みで、\(p^\mu p_\mu = \hat{\eta}_{\mu\nu}\,p^\mu p^\nu\) と計量テンソルの成分を使って計算するの(たとえば \(p_+ = \hat{\eta}_{+-}p^- + \hat{\eta}_{++}p^+ = -p^-\) のように添字が下りるけれど、今は \(\hat{\eta}_{\mu\nu}\) の成分を直接代入するほうが早いわ)。ここで \(p^+\) と \(p^-\) の定義から
だから \((p^0)^2 - (p^1)^2 = 2\,p^+ p^-\)。これを代入すると \(-(p^0)^2 + (p^1)^2 = -2\,p^+ p^-\) なので
🔵 カイ: \(ds^2\) のときと全く同じ構造ですね。座標の微小変化 \(dx^\mu\) を運動量 \(p^\mu\) に置き換えただけだ。
🟡 リナ: その通り。(二重和を展開すると、\(\hat{\eta}_{\mu\nu}\) がゼロでない成分は \(\hat{\eta}_{+-} = \hat{\eta}_{-+} = -1\) と \(\hat{\eta}_{22} = \hat{\eta}_{33} = +1\) だけだから、生き残る項は 4 つ:\(\hat{\eta}_{+-}p^+p^- + \hat{\eta}_{-+}p^-p^+ + \hat{\eta}_{22}p^2 p^2 + \hat{\eta}_{33}p^3 p^3\)。ここで \(p^+, p^-, p^2, p^3\) はただの数(演算子ではない)だから積の順序を入れ替えてよくて、\(p^-p^+ = p^+p^-\)。よって \(= (-1)p^+p^- + (-1)p^+p^- + (p^2)^2 + (p^3)^2 = -2p^+p^- + (p^2)^2 + (p^3)^2\)。対角成分 \(\hat{\eta}_{++} = \hat{\eta}_{--} = 0\) なので他の項はゼロ。)
ここで \((p^2)^2\) は「\(p^2\)(運動量の第 2 成分)の 2 乗」という意味よ。添字の 2 と冪乗の 2 が紛らわしいから、必要に応じて \((p^I)^2\)(\(I = 2, 3\))のように大文字ラテン添字を使うこともあるわ。\(p^2\) と \(p^3\) は光錐座標の定義で触らなかった方向——\(x^+, x^-\) 軸に横向き(perpendicular)の成分——だから、まとめて横運動量 \(\vec{p}_\perp = (p^2, p^3)\) と書くの。\((p^2)^2 + (p^3)^2 = |\vec{p}_\perp|^2\) ね。後の章でもこの記法を使うわ。
🔵 カイ: たしかに紛らわしい……。\(p^2\) が「\(p\) の 2 乗」なのか「第 2 成分」なのか一瞬迷います。\(\vec{p}_\perp\) の書き方のほうが安心ですね。
🟡 リナ: そうね。曖昧なときは \(\vec{p}_\perp\) を使うから安心して。では、これを \(p^-\) について解くわ。\(-2p^+p^- + |\vec{p}_\perp|^2 = -m^2\) の両辺を整理して \(2p^+p^- = |\vec{p}_\perp|^2 + m^2\)、両辺を \(2p^+\) で割ると
(ここで \(|\vec{p}_\perp|^2 = (p^2)^2 + (p^3)^2\)。)
🔵 カイ: 解ける! \(p^-\) は他の成分(\(p^+, p^2, p^3\) と質量)で決まってしまう。つまり独立な変数が一つ減るってことですよね——通常座標だと \(E\) を求めるのに平方根が要ったのに、ここでは割り算一発で出る。でも待ってください——\(p^+\) がゼロだと分母がゼロで発散しますよね? それって何を意味するんですか?
🟡 リナ: いい着眼点。\(p^+ = \frac{1}{\sqrt{2}}(E + p^1)\) だから、質量がある粒子で正エネルギー解(\(E > 0\))を選べば \(E > |p^1|\) が成り立つの。理由を丁寧に追うと:\(|\vec{p}|^2 = (p^1)^2 + (p^2)^2 + (p^3)^2\) で、\((p^2)^2\) と \((p^3)^2\) は 0 以上だから \(|\vec{p}|^2 \geq (p^1)^2\)。よって \(E^2 = |\vec{p}|^2 + m^2 \geq (p^1)^2 + m^2 > (p^1)^2\)。ここで正エネルギー解 \(E > 0\) を選んでいるから、両辺の正の平方根をとって \(E = \sqrt{E^2} > \sqrt{(p^1)^2} = |p^1|\)(正の数 \(a, b\) について \(a^2 > b^2\) ならば \(a > b\) だから、\(a = E > 0\) と \(b = |p^1| \geq 0\) に適用した)。\(E > |p^1|\) ということは \(E > -p^1\)(\(p^1\) が負でも)だから \(E + p^1 > 0\)、つまり必ず \(p^+ > 0\) になる。
⚪ メイ: 質量がある限り、正エネルギーなら \(p^+\) は必ず正——分母がゼロになる心配はないのね。
🟡 リナ: そう。\(p^+ = 0\) は質量ゼロの粒子が \(x^1\) の負方向にちょうど光速で進む場合(\(E = |p^1|\) かつ \(p^1 < 0\) で \(E + p^1 = 0\))に対応するの。光錐量子化では \(p^+ > 0\) の粒子だけを扱う約束にして、この問題を回避するわ。通常の座標では \(p^\mu p_\mu = -(p^0)^2 + |\vec{p}|^2 = -m^2\) だから \(p^0 = \pm\sqrt{|\vec{p}|^2 + m^2}\) と \(\pm\) の符号曖昧性が残る(\(p^0 > 0\) が正エネルギー解=通常の粒子、\(p^0 < 0\) が負エネルギー解)。ところが光錐座標では1 次方程式で \(p^-\) が一意に決まる。
⚪ メイ: 符号曖昧性が消えるのね。
🟡 リナ: その通り。これが第 14 章の光円錐量子化で、物理状態だけを最初から拾える理由よ。
🟡 リナ: ここまでの通常座標と光錐座標の対比を表にまとめておくわね。
表 5.3: 通常座標と光錐座標の比較
| 項目 | 通常座標 \((x^0, x^1, x^2, x^3)\) | 光錐座標 \((x^+, x^-, x^2, x^3)\) |
|---|---|---|
| 定義 | \(x^0 = t\), \(x^1 = x\) | \(x^\pm = (x^0 \pm x^1)/\sqrt{2}\) |
| 計量 \(ds^2\) | \(-(dx^0)^2 + (dx^1)^2 + (dx^2)^2 + (dx^3)^2\) | \(-2\,dx^+dx^- + (dx^2)^2 + (dx^3)^2\) |
| 計量テンソル | \(\eta_{\mu\nu} = \mathrm{diag}(-1,+1,+1,+1)\) | \(\hat{\eta}_{+-} = -1\), \(\hat{\eta}_{22} = \hat{\eta}_{33} = +1\), 他は 0 |
| エネルギー-運動量 | $E = \pm\sqrt{ | \vec{p} |
| 符号の曖昧性 | \(\pm\) あり(正・負エネルギー解) | なし(\(p^+\) を正に固定すれば一意) |
| 光の世界線 | \(x^1 = \pm x^0\)(傾き \(\pm 1\)) | \(x^+ = \text{const}\) または \(x^- = \text{const}\) |
弦理論でのメリットの予告¶
🔵 カイ: 結局、光錐座標を使うと何がうれしいんですか? わざわざ座標を変える手間に見合うメリットがあるってことですよね?
🟡 リナ: 第 14 章(弦の量子化)で本格的に使うけれど、予告として 3 点挙げるわ。今は雰囲気だけ掴んでくれれば十分よ。
- \(p^-\) が従属変数になる:上で見たとおり。自由度が減る
- 余分な自由度の除去が簡単:点粒子が時空中を動くと 1 次元の軌跡=世界線を描くわよね。同じように、1 次元の弦が動くと 2 次元の面を描く——これを世界面と呼ぶの。この世界面には、物理に影響しない「座標の取り方の自由」がある——地図の描き方を変えても地形は変わらないのと同じで、世界面上の座標をどう取っても物理は変わらない。ところが計算するときには何か具体的な座標を選ばないといけないから、「どの座標を選んだか」という物理と無関係な情報が式に入り込んでしまう。すると方程式の解の中に「座標の選び方を変えただけの、物理的に同じ状態」が大量に紛れ込んで、本物の物理的自由度がどれか分からなくなるの。光錐座標を使うと、世界面上で「時間方向」を表すパラメータ \(\tau\) を \(x^+\) に合わせる自然な選び方(light-cone gauge)ができて、その冗長さを一気に固定できる。結果として横方向の振動 \(x^2, x^3, \ldots\) だけが物理的自由度として残る
🔵 カイ: 世界面って、弦が動いた「軌跡の面」ってことですよね。点が動くと線になるように、線が動くと面になると。地図のたとえは分かりやすいけど、「light-cone gauge」の具体的な意味は第 14 章 まで待てばいいですか?
🟡 リナ: そう、今は「光錐座標を使うと余分な自由度を消せる」という結論だけ覚えておいて。具体的な手順は第 14 章で一歩ずつやるわ。
- 物理的スペクトルが直接得られる:通常の方法では計算の途中に「確率が負になる」ような非物理的な状態が現れ、後から取り除く必要がある。光錐座標ではそうした状態を最初から排除できる
⚪ メイ: 自由度を減らして、非物理的な状態も排除できる——かなり強力ね。
🟡 リナ: ただし代償もある。Lorentz 共変性は明示的には失われる(\(x^+\) を特別扱いしているから)。でも物理的な結果は座標系によらないから問題ない——これは「特定の座標で計算しても一般の結果が得られる」という相対論の基本的な性質よ。
🔵 カイ: でも Lorentz 共変性って「物理法則がどの慣性系でも同じ形」ってことですよね? それを明示的に失うって、本当に大丈夫なんですか? 途中で何か見落とす危険はないんですか?
🟡 リナ: 鋭い心配ね。実際、光錐量子化では最後に「Lorentz 対称性が本当に保たれているか」を検算する必要があるの。その検算が成功する条件として時空の次元が \(D = 26\)(ボソン弦)や \(D = 10\)(超弦)に決まる——これは第 14 章で見る大きな結果よ。だから「見えなくなった共変性を最後に確認する」というステップがセットになっているの。
⚪ メイ: 共変性を見えなくする代わりに計算を楽にして、最後に共変性の検算をする——そこから時空の次元まで決まるのね。
🔵 カイ: つまり「楽をした分のツケを最後に払う」みたいな構造で、そのツケの支払いから逆に次元が決まるって……。でも逆に言えば、もし次元が 26 や 10 じゃなかったら Lorentz 対称性が破れてしまうってことですよね? それって実験で確かめられるんですか?
🟡 リナ: いい問いね。余剰次元が実験でどう見えるかは第 16 章で扱うわ。今の段階では「光錐座標は共変性を犠牲にして計算可能性を得る第一歩」と覚えておいて。弦理論ではこのトレードオフが頻繁に起きるの。
🔵 カイ: じゃあ逆に、共変性を保ったまま量子化する方法もあるんですか? そっちだと何が大変になるんだろう……。
🟡 リナ: あるわよ——共変量子化と呼ばれる方法。そちらでは確率が負になる非物理的な状態が途中で現れて、それを後から取り除く手間がかかるの。どちらの方法でも最終的な物理的結論は同じだけど、光錐量子化のほうが「物理的な自由度だけを最初から扱う」という意味で見通しがいい。詳しくは第 14 章で比較するわ。
🔵 カイ: 確率が負って……物理的にありえないものが計算途中に出てくるのは気持ち悪いですね。光錐量子化ならそれが最初から出ないなら、そっちのほうが安心だ。でも「最初から排除する」ってことは、排除していいものかどうかの判断を最初にしなきゃいけないわけで——その判断を間違えたら物理的に大事な状態まで捨てちゃう危険はないんですか?
🟡 リナ: その心配はもっともよ。光錐量子化で残す自由度は、ゲージ対称性(世界面の座標変換の自由度)を完全に固定した後に残るものだから、物理的な状態を捨ててしまうことはないの。そして最後に Lorentz 対称性の検算をすることで、「本当に何も見落としていないか」を確認する——さっき言った \(D = 26\) の条件がまさにその検算よ。詳しくは第 14 章で実際にやるわ。
📝 練習問題:
- 光錐座標でのスカラー積、\(p^-\) の表式、光錐座標での Lorentz 変換 → 練習問題
✅ 理解度チェック: 光錐座標 \(x^+, x^-\) の定義を書いてください。
答え
\(x^+ = \frac{1}{\sqrt{2}}(x^0 + x^1)\), \(x^- = \frac{1}{\sqrt{2}}(x^0 - x^1)\)。\(c = 1\) の自然単位系で \(x^0 = t\), \(x^1 = x\) で、残りの座標 \(x^2, x^3\) はそのまま。
✅ 理解度チェック: 光錐座標で \(ds^2\) はどう書けるでしょうか?
答え
\(ds^2 = -2\,dx^+ dx^- + (dx^2)^2 + (dx^3)^2\)。
✅ 理解度チェック: 質量 \(m\) の粒子の \(p^-\) が \(p^+\) と横運動量 \(p^2, p^3\) でどう決まるか。
答え
\(p^\mu p_\mu = -m^2\) を光錐座標で書くと \(-2p^+p^- + (p^2)^2 + (p^3)^2 = -m^2\)。これを解いて \(p^- = \dfrac{(p^2)^2 + (p^3)^2 + m^2}{2p^+}\)。
5.5 残された問い — 加速と重力へ¶
🟡 リナ: 特殊相対論は慣性系——等速直線運動をしている観測者——の間の物理を記述する。でも、加速している観測者や重力場の中の観測者はどうなるの?
🔵 カイ: 加速と重力は関係があるんですか?
🟡 リナ: いい直感ね。エレベーターが加速しているとき、中の人は重力が強くなったように感じる。逆に、自由落下しているエレベーターの中では無重力になる。加速と重力は区別できない——これが等価原理。次章の出発点よ。
🟡 リナ: Minkowski 計量 \(\eta_{\mu\nu}\) は「平坦な時空」を記述している。でも重力があると時空が曲がる——すると計量が場所によって変わる \(g_{\mu\nu}(x)\) に一般化されるの。弦理論でも、弦が動く背景時空の計量として \(g_{\mu\nu}\) が登場する(背景時空を「target space(標的空間)」と呼ぶけれど、正式には第 13 章で導入するわ)。特殊相対論の \(\eta_{\mu\nu}\) はすべての出発点よ。
⚪ メイ: つまり \(\eta_{\mu\nu}\) は \(g_{\mu\nu}(x)\) の「どこでも同じ」という特別な場合なのね。
✅ 理解度チェック: 等価原理とは何でしょうか?
答え
加速と重力は局所的に区別できないという原理。例えば加速するエレベーター内では重力が強くなったように感じ、自由落下中のエレベーター内では無重力になる。
次章予告¶
第 6 章「重力の本質は何か? — 一般相対性理論」 ——等価原理から出発し、「重力とは時空の曲がりである」という Einstein の一般相対論の要点を概観する。導出・計算の詳細は「一般相対論」編に委ね、本章では弦理論で使う形——計量テンソル、測地線、Einstein 方程式——をコンパクトに整理し、粒子の作用の「便利な形」が弦の作用(第 13 章)へそのまま拡張される構造を明らかにする。
参考文献¶
- Barton Zwiebach, A First Course in String Theory, Ch.2: "Special Relativity and Extra Dimensions" — 光錐座標(弦理論での使い方)
- 「一般相対論」編 第 3 章 特殊相対論 — Lorentz 変換と物理的帰結 — 光速不変・Lorentz 変換の導出
- 「一般相対論」編 第 4 章 Minkowski 時空の数学 — 計量・4 元ベクトル・テンソル — 添字記法・4 元運動量・低速極限展開
- 「場の量子論」編 第 2 章 特殊相対論と Lorentz 不変性の復習 — 場の理論における Lorentz 不変性
このページについてフィードバック
分からなかった箇所、誤りの指摘、改善提案などをお寄せください。