第 6 章 練習問題 解答¶
目次
Basic(基礎)
- B-1. 2 次元極座標のヤコビアン
- B-2. 3 次元球座標の逆計量
- B-3. 一般 2 次元計量の行列表示
- B-4. 球面上の特定の点での計量テンソル
- B-5. 線形座標変換の Jacobi 行列
- B-6. 計量テンソルの変換則の適用
- B-7. 座標基底ベクトルの直交座標成分
- B-8. 逆変換の Jacobi 行列の行列式
Medium(標準)
- M-1. 座標変換 \((u, v)\) と計量テンソル
- M-2. 球座標の線素の導出
- M-3. 放物線座標の計量テンソル
- M-4. 計量テンソルの対称性の証明
- M-5. 円筒面の計量と平坦性
- M-6. 球面上の「円」の幾何学
- M-7. 計量テンソルの変換則による \(g'_{33}\) の導出
Advanced(発展)
Basic(基礎)¶
B-1. 2 次元極座標のヤコビアン¶
→ 問題に戻る
問題:
2 次元極座標 \((r, \theta)\) から直交座標 \((x, y)\) への Jacobi(ヤコビ)行列
の行列式(ヤコビアン)\(\det J\) を求めよ。
解法の方針: Jacobi 行列の行列式を直接計算する。
Jacobi 行列は:
行列式を計算すると:
検算: 極座標の面積要素 \(dA = r\,dr\,d\theta\) のヤコビアンが \(r\) であることと一致する。また \(r > 0\) で正則であり、\(r = 0\)(原点)で退化することも幾何学的に正しい。
B-2. 3 次元球座標の逆計量¶
→ 問題に戻る
問題:
3 次元球座標 \((r, \theta, \varphi)\) における線素
から、計量テンソル \(g_{ij}\) の逆行列 \(g^{ij}\)(逆計量(inverse metric))を求めよ。
解法の方針: 計量テンソルが対角行列なので、逆行列は各対角成分の逆数をとればよい。
計量テンソルは:
対角行列の逆行列は各対角成分の逆数なので:
検算: \(g_{ij}\,g^{jk} = \delta_i^k\) を確認する。例えば \((2,2)\) 成分:\(r^2 \cdot \dfrac{1}{r^2} = 1\)。\((3,3)\) 成分:\(r^2\sin^2\theta \cdot \dfrac{1}{r^2\sin^2\theta} = 1\)。非対角成分はすべて 0。確かに単位行列になる。✓
B-3. 一般 2 次元計量の行列表示¶
→ 問題に戻る
問題:
2 次元の座標 \((u, v)\) で計量が
と与えられている。計量テンソル \(g_{ij}\) を \(2 \times 2\) の行列形式で書き下せ。
解法の方針: \(ds^2 = g_{ij}\,du^i\,du^j\) を展開して係数を比較する。
線素を展開すると:
計量テンソルの対称性 \(g_{12} = g_{21}\) を用いると、交差項の係数は \(2g_{12}\) である。
与えられた線素と比較して:
- \(g_{11} = 1 + u^2\)
- \(2g_{12} = 2uv \implies g_{12} = uv\)
- \(g_{22} = 1 + v^2\)
検算: 行列式 \(\det g = (1+u^2)(1+v^2) - u^2v^2 = 1 + u^2 + v^2 > 0\) なので正定値であり、Riemann 計量として整合的。✓
B-4. 球面上の特定の点での計量テンソル¶
→ 問題に戻る
問題:
半径 \(a\) の球面の計量
において、点 \((\theta, \varphi) = (\pi/3,\, 0)\) での計量テンソル \(g_{ij}\) の成分を具体的に書き下せ。
解法の方針: \(\theta = \pi/3\) を計量テンソルの成分に代入する。
球面の計量テンソルは:
\(\theta = \pi/3\) のとき \(\sin(\pi/3) = \dfrac{\sqrt{3}}{2}\) なので \(\sin^2(\pi/3) = \dfrac{3}{4}\)。
検算: \(\theta = \pi/2\)(赤道)なら \(g_{22} = a^2\) で最大、\(\theta = 0\)(北極)なら \(g_{22} = 0\) で退化する。\(\theta = \pi/3\) は赤道と北極の間なので \(g_{22} = \frac{3}{4}a^2\) は \(0\) と \(a^2\) の間にあり、妥当。✓
B-5. 線形座標変換の Jacobi 行列¶
→ 問題に戻る
問題:
2 次元で座標 \((x^1, x^2) = (x, y)\) から \((u^1, u^2) = (u, v)\) への変換が
で与えられている。Jacobi 行列 \(\dfrac{\partial x^i}{\partial u^j}\) を求めよ。
解法の方針: 各偏微分を直接計算する。
\(x = u + v\), \(y = u - v\) より:
検算: \(\det J = 1 \cdot (-1) - 1 \cdot 1 = -2 \neq 0\) なので正則。逆変換 \(u = \frac{x+y}{2}\), \(v = \frac{x-y}{2}\) が存在することと整合する。✓
B-6. 計量テンソルの変換則の適用¶
→ 問題に戻る
問題:
問題 B-5. 線形座標変換の Jacobi 行列 の座標変換に対して、直交座標の計量 \(g_{ij} = \delta_{ij}\) を計量テンソルの変換則
を用いて新しい座標 \((u, v)\) での計量テンソル \(g'_{kl}\) を求めよ。結果を行列形式で書け。
解法の方針: \(g' = J^T g\,J = J^T J\)(\(g = \delta_{ij}\) なので)を計算する。
各成分を計算する:
- \((1,1)\): \(1 \cdot 1 + 1 \cdot 1 = 2\)
- \((1,2)\): \(1 \cdot 1 + 1 \cdot (-1) = 0\)
- \((2,1)\): \(1 \cdot 1 + (-1) \cdot 1 = 0\)
- \((2,2)\): \(1 \cdot 1 + (-1)(-1) = 2\)
すなわち線素は \(ds^2 = 2\,du^2 + 2\,dv^2\) となる。
検算: 直接代入で確認する。\(dx = du + dv\), \(dy = du - dv\) より:
B-7. 座標基底ベクトルの直交座標成分¶
→ 問題に戻る
問題:
2 次元極座標の座標基底ベクトル(coordinate basis vector)\(\boldsymbol{e}_\theta\) について、点 \(r = 3\), \(\theta = \pi/4\) における直交座標成分 \((\boldsymbol{e}_\theta)^x\), \((\boldsymbol{e}_\theta)^y\) を求めよ。
解法の方針: \(\boldsymbol{e}_\theta\) の直交座標成分を偏微分で求め、具体的な値を代入する。
座標基底ベクトルの定義より:
\(x = r\cos\theta\), \(y = r\sin\theta\) より:
\(r = 3\), \(\theta = \pi/4\) を代入すると、\(\sin(\pi/4) = \cos(\pi/4) = \dfrac{\sqrt{2}}{2}\) なので:
検算: \(\boldsymbol{e}_\theta\) の大きさの 2 乗は \(|\boldsymbol{e}_\theta|^2 = \left(\frac{3\sqrt{2}}{2}\right)^2 + \left(\frac{3\sqrt{2}}{2}\right)^2 = \frac{18}{4} + \frac{18}{4} = 9 = r^2\)。これは計量テンソルの \(g_{\theta\theta} = r^2 = 9\) と一致する。✓
B-8. 逆変換の Jacobi 行列の行列式¶
→ 問題に戻る
問題:
2 次元極座標で、逆変換の Jacobi 行列
の行列式 \(\det \tilde{J}\) を求め、問題 B-1. 2 次元極座標のヤコビアン で求めた \(\det J\) との関係を確認せよ。
解法の方針: \(J\tilde{J} = I\) の関係から行列式の関係を導く。
\(J\tilde{J} = I\) の両辺の行列式をとると:
問題 B-1. 2 次元極座標のヤコビアン より \(\det J = r\) なので:
\(\det J\) と \(\det \tilde{J}\) は互いに逆数の関係にある。
検算: 逆変換の Jacobi 行列を直接使って確認する。本文より:
Medium(標準)¶
M-1. 座標変換 \((u, v)\) と計量テンソル¶
→ 問題に戻る
問題:
参考図: 図 5.1: 直交座標と極座標
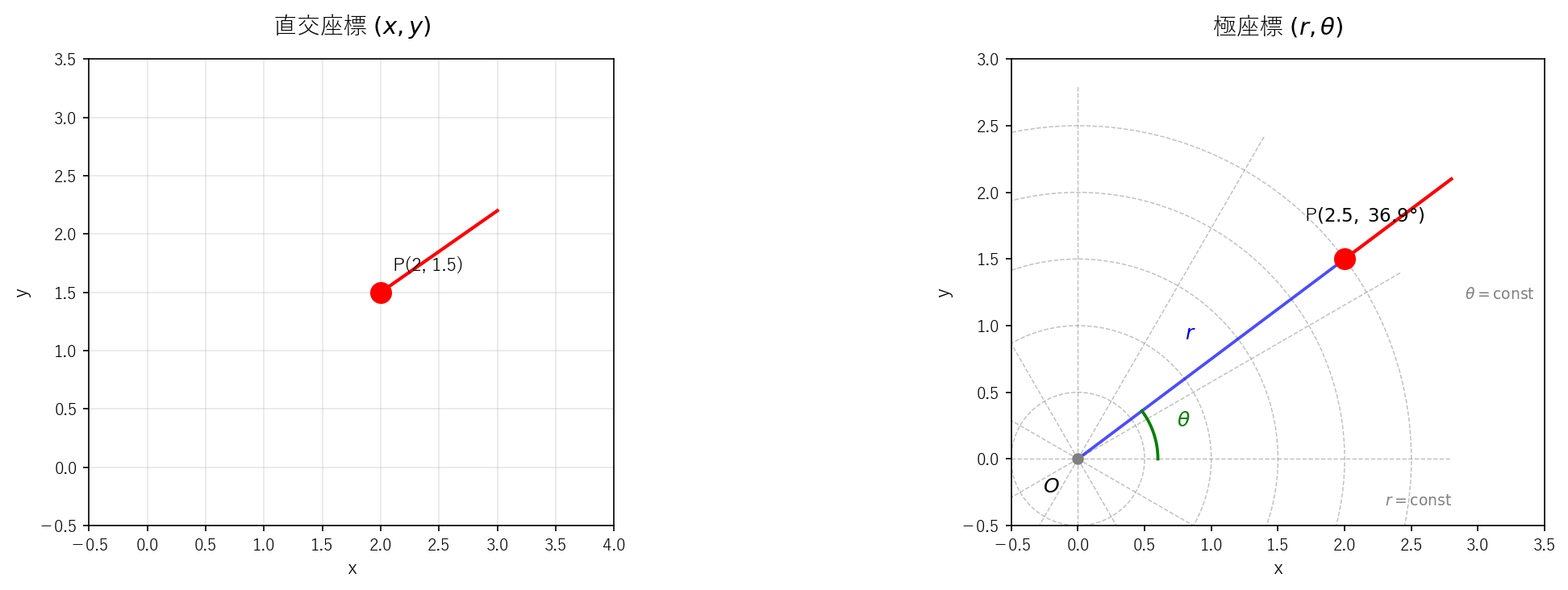{kind=link}
2 次元平面で、座標変換 \(u = x + y\), \(v = x - y\) を考える。
(a) Jacobi 行列 \(\dfrac{\partial(x, y)}{\partial(u, v)}\) を求めよ。
(b) この座標系での計量テンソル \(g'_{ij}\) を、変換則を用いて求めよ。
(c) \(ds^2 = dx^2 + dy^2\) をこの座標で書き直し、(b) の結果と一致することを確認せよ。
解法の方針: 逆変換の Jacobi 行列を求め、変換則で計量テンソルを導出し、直接代入で検証する。
(a) Jacobi 行列 \(\partial(x, y)/\partial(u, v)\):
座標変換 \(u = x + y\), \(v = x - y\) の逆変換を求める。連立方程式を解くと、
Jacobi 行列は、
(b) 変換則による計量テンソル \(g'_{ij}\) の導出:
変換則 \(g'_{kl} = \dfrac{\partial x^i}{\partial u^k}\dfrac{\partial x^j}{\partial u^l}\,g_{ij}\) を用いる。元の座標の計量は \(g_{ij} = \delta_{ij}\)(直交座標)なので、\(g' = J^T J\) を計算すればよい。
各成分を計算する:
-
\((1,1)\): \(\dfrac{1}{2}\cdot\dfrac{1}{2} + \dfrac{1}{2}\cdot\dfrac{1}{2} = \dfrac{1}{4} + \dfrac{1}{4} = \dfrac{1}{2}\)
-
\((1,2)\): \(\dfrac{1}{2}\cdot\dfrac{1}{2} + \dfrac{1}{2}\cdot\left(-\dfrac{1}{2}\right) = \dfrac{1}{4} - \dfrac{1}{4} = 0\)
-
\((2,1)\): \(\dfrac{1}{2}\cdot\dfrac{1}{2} + \left(-\dfrac{1}{2}\right)\cdot\dfrac{1}{2} = \dfrac{1}{4} - \dfrac{1}{4} = 0\)
-
\((2,2)\): \(\dfrac{1}{2}\cdot\dfrac{1}{2} + \left(-\dfrac{1}{2}\right)\left(-\dfrac{1}{2}\right) = \dfrac{1}{4} + \dfrac{1}{4} = \dfrac{1}{2}\)
(c) 直接代入による検証:
\(x = (u+v)/2\), \(y = (u-v)/2\) より、
\(ds^2 = dx^2 + dy^2\) に代入すると、
これは (b) の計量テンソル \(g'_{ij} = \text{diag}(1/2,\, 1/2)\) と完全に一致する。✓
検算: \(\det J = \dfrac{1}{2}\cdot\left(-\dfrac{1}{2}\right) - \dfrac{1}{2}\cdot\dfrac{1}{2} = -\dfrac{1}{2} \neq 0\) なので正則。\(\det g' = 1/4 = (\det J)^2\) も整合する。計量が対角かつ定数なので、この座標系は直交座標系であり、空間は平坦(問題 M-5. 円筒面の計量と平坦性 の議論と整合)。✓
M-2. 球座標の線素の導出¶
→ 問題に戻る
問題:
3 次元球座標 \((r, \theta, \varphi)\) の線素
を、直交座標の線素 \(ds^2 = dx^2 + dy^2 + dz^2\) と座標変換
から導出せよ。全微分 \(dx\), \(dy\), \(dz\) を \((dr, d\theta, d\varphi)\) で表し、代入・整理する過程を全て示すこと。
解法の方針: \(x = r\sin\theta\cos\varphi\), \(y = r\sin\theta\sin\varphi\), \(z = r\cos\theta\) の全微分を求め、\(ds^2 = dx^2 + dy^2 + dz^2\) に代入する。
全微分の計算:
\(dx\) の計算:
\(dy\) の計算:
\(dz\) の計算:
\(dx^2\) の展開:
\(dy^2\) の展開:
\(dz^2\) の展開:
足し合わせ:
\(dr^2\) の係数:
\(d\theta^2\) の係数:
\(d\varphi^2\) の係数:
\(dr\,d\theta\) の係数:
\(dr\,d\varphi\) の係数:
\(d\theta\,d\varphi\) の係数:
最終結果:
すべての交差項が消え:
検算:
- \(\theta = \pi/2\)(\(xy\) 平面)に制限すると \(ds^2 = dr^2 + r^2\,d\varphi^2\) となり、2 次元極座標の線素に一致する。✓
- 次元解析:各項は [長さ]\(^2\) の次元を持つ。✓
M-3. 放物線座標の計量テンソル¶
→ 問題に戻る
問題:
2 次元の放物線座標(parabolic coordinates)\((\sigma, \tau)\) が
で定義されている。
(a) Jacobi 行列 \(\dfrac{\partial x^i}{\partial u^j}\)(ここで \((u^1, u^2) = (\sigma, \tau)\))を求めよ。
(b) 計量テンソルの変換則を用いて、放物線座標での計量テンソル \(g'_{kl}\) を導出し、線素 \(ds^2\) を \((\sigma, \tau)\) で表せ。
(a) Jacobi 行列:
\(x = \sigma\tau\), \(y = \frac{1}{2}(\tau^2 - \sigma^2)\) より:
(b) 計量テンソルの導出:
\(g' = J^T J\) を計算する:
各成分:
- \((1,1)\): \(\tau^2 + \sigma^2\)
- \((1,2)\): \(\tau\sigma - \sigma\tau = 0\)
- \((2,1)\): \(\sigma\tau - \tau\sigma = 0\)
- \((2,2)\): \(\sigma^2 + \tau^2\)
したがって線素は:
検算: 計量が共形的に平坦(conformal to flat)な形 \(ds^2 = \Omega^2(d\sigma^2 + d\tau^2)\) になっている。これは放物線座標が直交座標系(\(g_{12} = 0\))であることを意味し、等角写像の性質と整合する。
また、\(\det J = \tau^2 + \sigma^2\) であり、\(\det g' = (\sigma^2 + \tau^2)^2 = (\det J)^2\) が成り立つことも確認できる。✓
M-4. 計量テンソルの対称性の証明¶
→ 問題に戻る
問題:
参考図: 図 5.2: 球面の計量
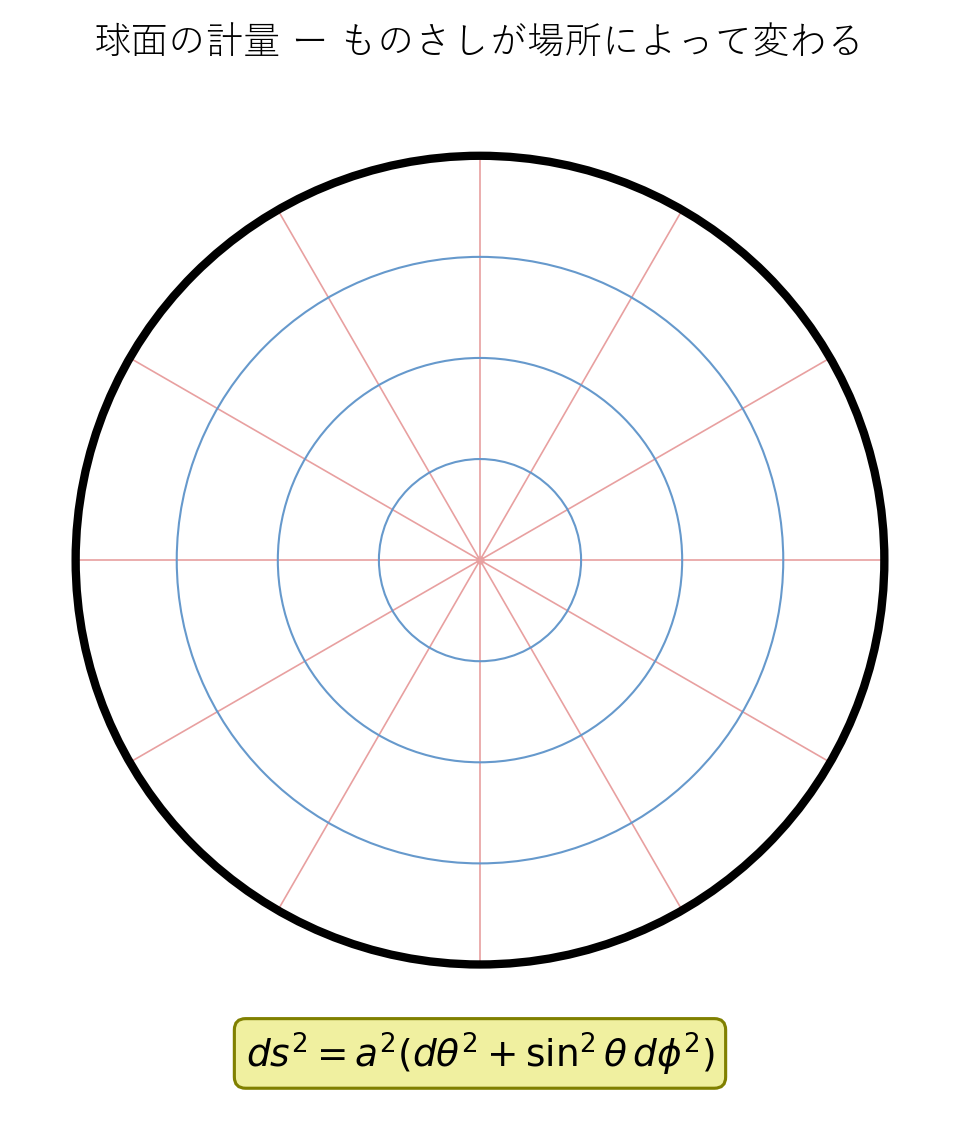{kind=link}
計量テンソルの変換則
から、計量テンソルが対称テンソルであること、すなわち \(g'_{kl} = g'_{lk}\) であることを、元の座標系での対称性 \(g_{ij} = g_{ji}\) を仮定して示せ。
解法の方針: 変換則の右辺で添字を入れ替え、\(g_{ij} = g_{ji}\) を用いる。
計量テンソルの変換則は:
\(g'_{lk}\) を書き下すと:
右辺でダミー添字 \(i\) と \(j\) を入れ替える(和の添字の名前を変えるだけなので値は変わらない):
ここで \(g_{ji} = g_{ij}\)(元の座標系での対称性の仮定)を用いると:
よって、元の座標系で計量テンソルが対称であれば、任意の座標変換後も対称性は保たれる。 \(\blacksquare\)
検算: 問題 B-6. 計量テンソルの変換則の適用 の具体例で確認する。\(g'_{kl} = \begin{pmatrix} 2 & 0 \\ 0 & 2 \end{pmatrix}\) は明らかに対称。問題 M-3. 放物線座標の計量テンソル の放物線座標でも \(g'_{12} = g'_{21} = 0\) で対称。✓
M-5. 円筒面の計量と平坦性¶
→ 問題に戻る
問題:
半径 \(a\) の円筒面(cylinder)を座標 \((\varphi, z)\)(\(\varphi\) は周方向の角度、\(z\) は高さ)で記述するとき、線素は
となる。
(a) この計量テンソル \(g_{ij}\) を行列形式で書け。
(b) 円筒面の計量テンソルの成分は座標に依存しない定数である。これと、球面の計量テンソルの成分が \(\theta\) に依存する事実を対比し、「計量テンソルの成分が定数 ⇒ 空間が平坦」という主張が正しいかどうか、本章の内容に基づいて論じよ。
(a) 計量テンソルの行列表示:
線素 \(ds^2 = a^2\,d\varphi^2 + dz^2\) より:
(b) 計量テンソルが定数であることと平坦性の関係:
結論:「計量テンソルの成分が定数 ⇒ 空間が平坦」という主張は正しい。
以下にその論拠を述べる。
円筒面が平坦であること:
円筒面は紙を丸めて作ることができる。紙を丸める操作は紙の上の距離関係を一切変えない(伸び縮みしない)ので、円筒面の内在的な幾何は平坦な平面と同じである。実際、座標変換 \(s = a\varphi\) を行えば:
となり、これは平面の直交座標の線素そのものである。
計量テンソルが定数であることの意味:
計量テンソルの成分がすべて定数であるとき、座標変換(定数行列による線形変換)によって計量を \(\delta_{ij}\)(単位行列)に変換できる。具体的には、\(g_{ij}\) が正定値対称定数行列であれば、適当な定数行列 \(A\) により \(A^T g A = I\) とできる。この変換後の座標は直交座標そのものであり、空間は平坦である。
球面との対比:
球面の計量テンソル \(g_{ij} = \begin{pmatrix} a^2 & 0 \\ 0 & a^2\sin^2\theta \end{pmatrix}\) は \(\theta\) に依存する。しかし、本章で述べられているように、計量テンソルが座標に依存するだけでは空間が曲がっているとは言えない(平坦な平面の極座標でも \(g_{22} = r^2\) は座標に依存する)。空間が本当に曲がっているかどうかは、座標変換によって計量テンソルを定数(あるいは \(\delta_{ij}\))にできるかどうかで判定される。球面の場合、どのような座標変換を行っても計量テンソルを定数にすることはできず、これが球面が内在的に曲がっていることの反映である(厳密にはリーマン曲率テンソルで判定する)。
ただし逆は成り立たない(平坦な空間でも曲線座標を使えば計量テンソルは座標に依存する)。
M-6. 球面上の「円」の幾何学¶
→ 問題に戻る
問題:
半径 \(a\) の球面上で、北極(\(\theta = 0\))を中心とする「円」(\(\theta = \theta_0\) = 一定の線)を考える。
(a) この円の円周 \(C\) を、球面の計量 \(ds^2 = a^2\,d\theta^2 + a^2\sin^2\theta\,d\varphi^2\) を用いて求めよ。
(b) 北極からこの円までの球面上の距離(\(\varphi\) 一定の経線に沿った距離)\(r\) を求めよ。
(c) \(C/(2\pi r)\) を計算し、\(\theta_0\) が大きくなると 1 より小さくなることを確認せよ。これは球面が正の曲率を持つことの現れである。
解法の方針: 球面の計量 \(ds^2 = a^2(d\theta^2 + \sin^2\theta\,d\varphi^2)\) を用いて、円周と距離を計算する。
(a) 円周 \(C\) の計算:
\(\theta = \theta_0\) = 一定の線上では \(d\theta = 0\) なので、線素は
\(\varphi\) を \(0\) から \(2\pi\) まで積分すると、
(b) 北極からの球面上の距離 \(r\):
北極(\(\theta = 0\))から \(\theta = \theta_0\) の線までの球面上の距離は、\(\varphi\) = 一定の大円に沿って測る。\(d\varphi = 0\) なので、
\(\theta\) を \(0\) から \(\theta_0\) まで積分すると、
(c) \(C/(2\pi r)\) の計算:
\(\theta_0\) が大きくなると 1 より小さくなることの確認:
\(\theta_0 > 0\) のとき、\(\sin\theta_0 < \theta_0\) が成り立つ(\(\sin x < x\) for \(x > 0\))。したがって、
\(\theta_0 \to 0\) の極限では \(\sin\theta_0/\theta_0 \to 1\) となり、十分小さな円では平坦な空間と同じ比 \(C = 2\pi r\) が回復される。\(\theta_0\) が大きくなるにつれて比は 1 から減少し、\(\theta_0 = \pi/2\)(赤道)では \(C/(2\pi r) = \sin(\pi/2)/(\pi/2) = 2/\pi \approx 0.637\) となる。
物理的意味: 平坦な空間では円周と半径の比は常に \(C = 2\pi r\)(\(C/(2\pi r) = 1\))である。球面上でこの比が 1 より小さいことは、球面が正の曲率を持つことの直接的な反映である。正の曲率を持つ空間では、中心からの距離に対して円周が「足りない」——平坦な空間の場合よりも短くなる。これは球面の内在的な幾何学的性質であり、計量テンソルから直接計算できる量である。
検算: \(\theta_0 = \pi\)(南極を囲む「円」)では \(C = 2\pi a\sin\pi = 0\)、\(r = a\pi\)。南極は 1 点なので円周がゼロになるのは正しい。✓
\(\theta_0 \to 0\) で Taylor 展開すると \(\sin\theta_0 \approx \theta_0 - \theta_0^3/6\) なので \(C/(2\pi r) \approx 1 - \theta_0^2/6\)。曲率 \(K = 1/a^2\) の球面では \(C/(2\pi r) \approx 1 - Kr^2/6\) が成り立つことが知られており、\(r = a\theta_0\) を代入すると \(1 - (1/a^2)(a\theta_0)^2/6 = 1 - \theta_0^2/6\) で一致する。✓
M-7. 計量テンソルの変換則による \(g'_{33}\) の導出¶
→ 問題に戻る
問題:
計量テンソルの変換則
を用いて、3 次元球座標の計量 \(g'_{33} = r^2\sin^2\theta\) を、直交座標の計量 \(g_{ij} = \delta_{ij}\) から導け。(ヒント:\(\dfrac{\partial x}{\partial \varphi} = -r\sin\theta\sin\varphi\), \(\dfrac{\partial y}{\partial \varphi} = r\sin\theta\cos\varphi\), \(\dfrac{\partial z}{\partial \varphi} = 0\) を使う。)
解法の方針: 球座標 \((r, \theta, \varphi)\) と直交座標 \((x, y, z)\) の関係から、変換則を用いて \(g'_{33} = r^2\sin^2\theta\) を導く。
計算:
座標の対応:\(u^1 = r\), \(u^2 = \theta\), \(u^3 = \varphi\) とし、\(x^1 = x\), \(x^2 = y\), \(x^3 = z\) とする。
変換則は、
(\(g_{ij} = \delta_{ij}\) なので \(i = j\) の項のみ残る。)
座標変換 \(x = r\sin\theta\cos\varphi\), \(y = r\sin\theta\sin\varphi\), \(z = r\cos\theta\) より、各偏微分を計算する:
変換則に代入すると、
これは球座標の計量テンソルの \((3,3)\) 成分として知られている値と一致する。
検算: 問題 M-2. 球座標の線素の導出 で直接代入により導出した球座標の線素 \(ds^2 = dr^2 + r^2\,d\theta^2 + r^2\sin^2\theta\,d\varphi^2\) の \(d\varphi^2\) の係数と一致する。✓
\(\theta = \pi/2\)(赤道面)では \(g'_{33} = r^2\) となり、2 次元極座標の \(g_{\varphi\varphi} = r^2\) に帰着する。✓
\(\theta = 0\)(\(z\) 軸上)では \(g'_{33} = 0\) となり、\(\varphi\) 座標が退化する(\(z\) 軸上では \(\varphi\) の変化が距離に寄与しない)ことと整合する。✓
Advanced(発展)¶
A-1. 一般の曲線座標の計量テンソル¶
→ 問題に戻る
問題:
2 次元平面上に、次のような「一般の曲線座標」\((u^1, u^2)\) を考える:
ここで \(f\), \(g\) は十分滑らかな関数で Jacobi 行列は正則とする。
(a) この座標での計量テンソル \(g_{ij}\) を \(f\), \(g\) の偏微分で表せ。
(b) 座標基底ベクトル \(\boldsymbol{e}_1\), \(\boldsymbol{e}_2\) が直交する(\(g_{12} = 0\))ための条件を \(f\), \(g\) の偏微分を用いて書き下せ。
(c) 極座標と放物線座標(問題 M-3. 放物線座標の計量テンソル 参照)のそれぞれについて、(b) の直交条件が満たされているかどうかを確認せよ。
(a) 計量テンソルの導出:
\(x = f(u^1, u^2)\), \(y = g(u^1, u^2)\) に対して、直交座標の計量 \(ds^2 = dx^2 + dy^2\) を変換する。
全微分は:
\(ds^2 = dx^2 + dy^2 = g_{ij}\,du^i\,du^j\) より:
略記として \(f_i \equiv \dfrac{\partial f}{\partial u^i}\), \(g_i \equiv \dfrac{\partial g}{\partial u^i}\) と書くと:
成分を明示すると:
(b) 直交条件:
座標基底ベクトルが直交する条件 \(g_{12} = 0\) は:
これは 2 つの座標基底ベクトル \(\boldsymbol{e}_1 = (f_1, g_1)\) と \(\boldsymbol{e}_2 = (f_2, g_2)\) の内積がゼロであることを意味する。
(c) 具体例の確認:
極座標 \((u^1, u^2) = (r, \theta)\):
\(f = r\cos\theta\), \(g = r\sin\theta\) より:
直交条件を確認:
極座標は直交座標系である。
放物線座標 \((u^1, u^2) = (\sigma, \tau)\):
\(f = \sigma\tau\), \(g = \frac{1}{2}(\tau^2 - \sigma^2)\) より:
直交条件を確認:
放物線座標も直交座標系である。
検算: 問題 M-3. 放物線座標の計量テンソル で求めた放物線座標の計量テンソルが対角行列(\(g_{12} = 0\))であったことと一致する。極座標の計量 \(ds^2 = dr^2 + r^2\,d\theta^2\) も対角であり整合する。✓
A-2. Rindler 座標¶
→ 問題に戻る
問題:
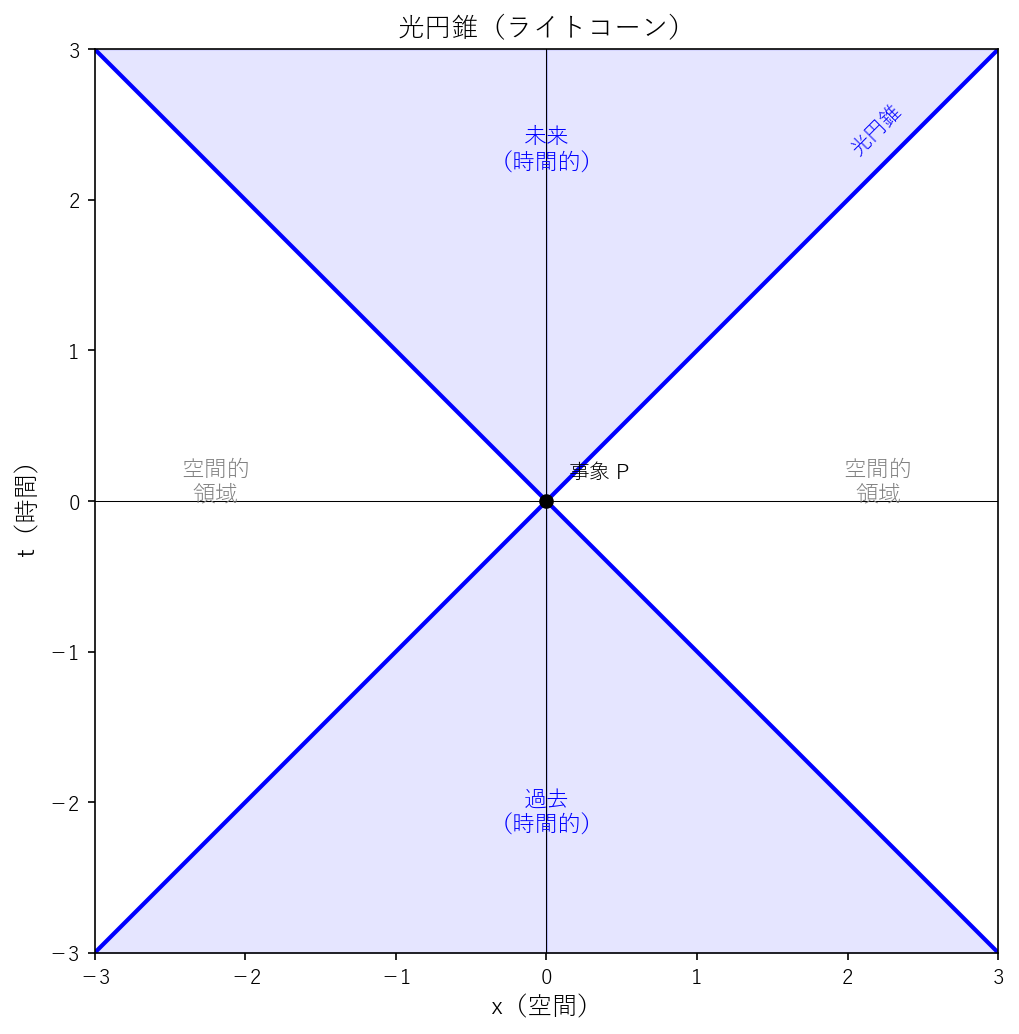{kind=link}
Minkowski(ミンコフスキー)時空の線素
に対し、Rindler(リンドラー)座標 \((\eta, \xi)\) を
で導入する(\(y\), \(z\) 方向は変換しない)。
(a) Jacobi 行列の成分 \(\dfrac{\partial(ct)}{\partial \eta}\), \(\dfrac{\partial(ct)}{\partial \xi}\), \(\dfrac{\partial x}{\partial \eta}\), \(\dfrac{\partial x}{\partial \xi}\) を求めよ。
(b) 計量テンソルの変換則を用いて、Rindler 座標での線素が
となることを示せ。
(c) この計量テンソルの \(g_{\eta\eta} = -\xi^2\) 成分が \(\xi\) に依存している。これは第 5 章の等価原理(equivalence principle)の議論——「一様な重力場中では場所によって時間の進み方が異なる」——とどのように関係するか、物理的な意味を論じよ。
(a) Jacobi 行列の成分:
\(ct = \xi\sinh\eta\), \(x = \xi\cosh\eta\) より:
(行は \((ct, x)\)、列は \((\eta, \xi)\) に対応)
(b) Rindler 座標での線素の導出:
Minkowski 計量は \(g_{\mu\nu} = \text{diag}(-1, +1, +1, +1)\) である。\(y\), \(z\) 方向は変換しないので、\((ct, x)\) 部分のみ考える。
変換則 \(g'_{kl} = \dfrac{\partial x^\mu}{\partial u^k}\dfrac{\partial x^\nu}{\partial u^l}\,g_{\mu\nu}\) を適用する。
\(g'_{\eta\eta}\) の計算:
ここで双曲線関数の恒等式 \(\cosh^2\eta - \sinh^2\eta = 1\) を用いた。
\(g'_{\xi\xi}\) の計算:
\(g'_{\eta\xi}\) の計算:
\(y\), \(z\) 方向は変換しないので \(g'_{yy} = 1\), \(g'_{zz} = 1\)。
したがって:
検算: \(\det J = \xi\cosh^2\eta - \xi\sinh^2\eta = \xi\) なので、\(\xi > 0\) で正則。また、\(\xi = \text{const}\) の世界線は \(x^2 - c^2t^2 = \xi^2\) を満たし、これは双曲線であり等加速度運動の世界線に対応する。✓
(c) 物理的意味の考察:
Rindler 座標は、一様な加速度 \(a = c^2/\xi\) で等加速度運動する観測者の座標系を記述する。等価原理により、この座標系は一様な重力場中の静止座標系と局所的に等価である。
\(g_{\eta\eta} = -\xi^2\) が \(\xi\) に依存することの物理的意味:
座標時間 \(\eta\) と固有時 \(\tau\) の関係は、静止した観測者(\(d\xi = dy = dz = 0\))に対して:
(\(c = 1\) の単位系では \(d\tau = \xi\,d\eta\))
これは、同じ座標時間 \(d\eta\) が経過しても、\(\xi\) の値が異なる場所では固有時の進み方が異なることを意味する。具体的には:
- \(\xi\) が大きい場所(加速方向の「上方」、重力場の類推では重力ポテンシャルが高い場所)では固有時が速く進む
- \(\xi\) が小さい場所(「下方」、重力ポテンシャルが低い場所)では固有時が遅く進む
- \(\xi \to 0\) では \(g_{\eta\eta} \to 0\) となり、固有時の進みが止まる(Rindler 地平線)
これはまさに第 5 章で議論した重力による時間の遅れ(gravitational time dilation)の現れである。等価原理によれば、一様な重力場中では「高い場所ほど時間が速く進む」。Rindler 計量の \(g_{\eta\eta} = -\xi^2\) という \(\xi\) 依存性は、この効果を計量テンソルの言葉で正確に表現したものである。
重力赤方偏移との関係:
異なる \(\xi\) の位置にいる 2 人の観測者が同じ座標時間間隔 \(\Delta\eta\) の信号をやり取りすると、それぞれの固有時間隔は \(\Delta\tau_1 = \xi_1\,\Delta\eta\)、\(\Delta\tau_2 = \xi_2\,\Delta\eta\) となる。\(\xi_1 < \xi_2\) のとき \(\Delta\tau_1 < \Delta\tau_2\) であり、「下方」から発した光は「上方」の観測者にとって赤方偏移して見える。これが重力赤方偏移(gravitational redshift)であり、等価原理から直接導かれる帰結である。
補足: \(\xi = 0\) は Rindler 地平線と呼ばれ、等加速度観測者から見て因果的に到達不可能な境界に対応する。これはブラックホールの事象の地平線との類似性を持ち、一般相対論の地平線の物理を理解するための重要な模型となっている。
このページについてフィードバック
分からなかった箇所、誤りの指摘、改善提案などをお寄せください。