第 3 章 特殊相対論 — Lorentz 変換と物理的帰結¶
前回までのあらすじ: 第 1 章で Newton の重力モデルの成功と限界——水星の近日点移動の 43″/世紀 のずれと、Poisson 方程式に時間微分がなく重力が瞬時に伝わるという構造的問題——を見た。第 2 章では「座標系に依存しない物理法則を作る」という設計図を広げ、テンソルという道具と、重力を時空の曲がりとして記述するという全体像を俯瞰した。そしてこの章以降、その設計図を具体的に一歩ずつ実装していく。
この章のゴール
- 第 2 章で俯瞰したテンソル階層の中で、最も基本的な 0 階テンソル(不変量)——座標変換しても値が変わらない量——である時空間隔 \(ds^2\) を光速不変の原理から導く
- そこから Lorentz (ローレンツ) 変換を導出し、同時性の相対性・時間の遅れ・長さの収縮という特殊相対論の物理的帰結を理解する
- 本章では「特殊相対論の物理」に焦点を合わせ、Minkowski 時空を記述するための数学的な道具(計量、4 元ベクトル、テンソル)は次章で整備する
3.1 二つの公理¶
🟡 リナ: 第 2 章の最後で、時空の不変量 \(ds^2 = -(cdt)^2 + dx^2 + dy^2 + dz^2\) の導出を予告したわね。この式を導くには、出発点となる公理——つまり「これだけは実験事実として認める」という土台——を先に確認しておく必要がある。特殊相対論の出発点は、たった二つの公理よ。
公理 1(相対性原理): 物理のモデルはすべての慣性系 (inertial frame) で同じ形をとる。
公理 2(光速不変の原理): 真空中の光速 \(c\) は、光源や観測者の運動によらず一定である。
🔵 カイ: 「慣性系」って、具体的にはどういう座標系ですか?
🟡 リナ: 加速も回転もしていない観測者の座標系、と言えばいい。等速直線運動をしている(または静止している)観測者から見た世界ね。電車が一定速度でまっすぐ走っているとき、車内の人にとっての座標系が慣性系。電車が加速したり、カーブを曲がったりしているときは慣性系ではない。
🔵 カイ: なるほど、イメージが掴めました。公理 1 は Galilei (ガリレイ) の時代からあった話ですよね。等速直線運動する電車の中でボールを投げても、地上と同じ運動方程式が成り立つ——みたいな。
🟡 リナ: その通り。もう少し正確に言えば、Newton の重力のように粒子間の相対位置だけに依存する力なら、Galilei 変換で座標がずれても相対位置は変わらないから、運動方程式の形は保たれる。例えば 2 つの粒子の間の万有引力は、両者の相対位置 \(\mathbf{r}_1 - \mathbf{r}_2\) だけで決まるから、座標原点をずらしても力の式は同じ形のまま。ただし、公理 1 は「慣性系」に限定されている。
⚪ メイ: 「慣性系に限定」って、加速している座標系では物理法則の形が変わってしまうということ?
🟡 リナ: そう。Einstein 自身もこの制限に不満を感じていたの。「なぜ慣性系だけが特別なのか? 物理法則はすべての座標系で同じ形をとるべきではないか?」——この問いが、後に一般相対論(1915 年)を生み出す動機の一つになった。でもまずは慣性系の間での話から始めましょう。
🟡 リナ: 問題は公理 2 の方。Galilei 変換では速度は単純に足し引きできたから、光速が一定というのは矛盾してしまう。つまり、Galilei 変換の方を修正しなければならない。二つの公理の関係を表にまとめておくわね。
表 3.1: 特殊相対論の二つの公理の比較
| 公理 1(相対性原理) | 公理 2(光速不変の原理) | |
|---|---|---|
| 内容 | 物理法則はすべての慣性系で同じ形 | 光速 \(c\) は光源・観測者の運動によらず一定 |
| 歴史 | Galilei の時代から存在 | 1887 年 Michelson-Morley 実験で裏付け |
| Galilei 変換との整合性 | 整合する | 矛盾する(速度の足し算が成り立たない) |
| 帰結 | 座標変換で物理法則の形が変わらない | 時間と空間が混ざり合う → Lorentz 変換が必要 |
🔵 カイ: 具体的にはどう矛盾するんですか?
🟡 リナ: 日常的な例で言えば、走っている電車から前方へボールを投げると、地上から見たボールの速度は「電車の速度+ボールの速度」になる:
これが Galilei 変換での速度の足し算。この足し算が成り立つ背景には、「時間はどの観測者にとっても同じ」——つまり \(t' = t\)——という暗黙の前提がある。ところが、走っている電車から前方へ光を放っても、地上から見た光の速さは「電車の速度+\(c\)」ではなく、依然として \(c\) のまま。Galilei 変換流の速度の足し算は、光に対しては成り立たない。
⚪ メイ: Galilei 変換の前提——\(t' = t\)、つまり時間は絶対的——のどこかが間違っている、ということね。
🟡 リナ: そう。時間も空間の座標も、観測者によって変わる量として扱い直さなければならない。ただ、そう結論づけるには実験的な裏付けが必要。
🔵 カイ: 光速が一定って、実験で確かめられてるんですか?
🟡 リナ: ええ。1887 年の Michelson (マイケルソン)–Morley (モーレー) の実験が、光速の方向依存性を \(\sim 10^{-8}\) のオーダーまで検出できなかった。当時は光を伝える媒質としてエーテル (aether) が存在すると考えられていて、地球がエーテルに対して動いていれば、光速に方向依存性が現れるはず——それを検出しようとした実験よ。結果は「異方性なし」。その後の改良実験で精度は飛躍的に向上して、現代のレーザー共振器実験では光速の等方性(方向による違いがないこと)が \(10^{-18}\) のオーダーまで確認されている。また Kennedy–Thorndike 実験とその現代版により、光速が観測者の速度にもよらないことも高精度で検証されている。光速不変は実験的に極めて堅い事実よ。
⚪ メイ: \(10^{-18}\) って……ほぼ完璧に一定ということね。
🟡 リナ: そう(図 3.1「マイケルソン・モーリー実験 (Michelson-Morley experiment) の概念図」も参照してね)。Einstein の革命は、この実験事実を「小手先の修正」ではなく物理の基本原理として受け入れたところにある。
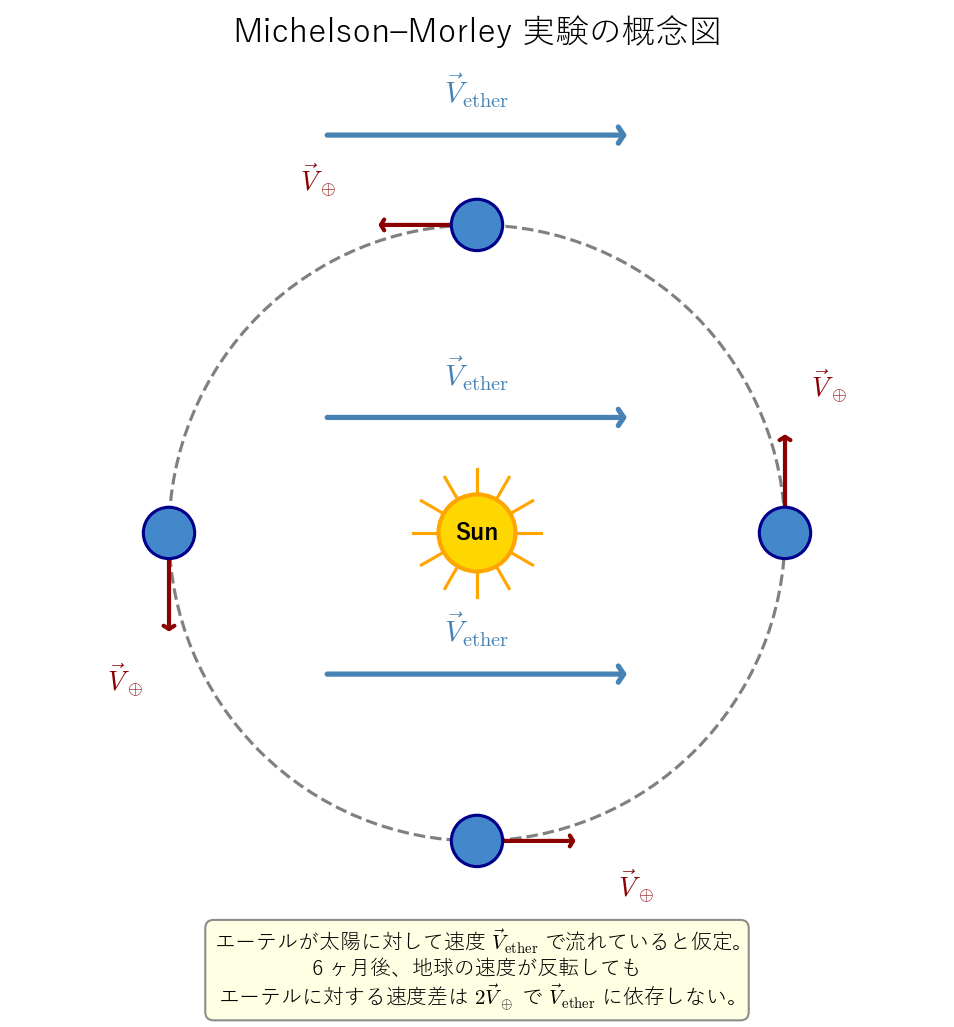
図 3.1: マイケルソン・モーリー実験 (Michelson-Morley experiment) の概念図。エーテルに対する地球の運動を検出しようとしたが、光速の異方性は見つからなかった。
では、この二つの公理から何が導かれるか——順番に追いかけていきましょう。
✅ 理解度チェック: Galilei 変換が光速不変の原理と矛盾するのはなぜでしょうか?
答え
Galilei 変換では速度が単純に足し引きされる(\(v_{\text{地上}} = v_{\text{電車}} + v_{\text{ボール}}\))。この規則に従えば、動いている光源から出た光の速さは観測者の運動状態に依存して \(c\) とは異なる値になるはずだが、光速不変の原理はどの慣性系でも光速が \(c\) であることを要求する。この矛盾は、Galilei 変換の前提である絶対時間(\(t' = t\))が成り立たないことを意味する。
✅ 理解度チェック: 特殊相対論の二つの公理を述べてください。
答え
公理 1(相対性原理):物理のモデルはすべての慣性系で同じ形をとる。公理 2(光速不変の原理):真空中の光速 \(c\) は、光源や観測者の運動によらず一定である。
✅ 理解度チェック: 慣性系とはどのような座標系でしょうか? 慣性系ではない例を一つ挙げてください。
答え
加速も回転もしていない観測者の座標系。等速直線運動をしている(または静止している)観測者から見た世界。慣性系ではない例:加速している電車の車内、カーブを曲がっている電車の車内、回転している遊園地の遊具の上など。
🟡 リナ: 光速不変の原理が何を意味するか、具体的なイメージを持っておきましょう。慣性系 \(S\) の原点に光源を置いて、時刻 \(t = 0\) に光を発したとする。光は真空中をあらゆる方向に同じ速さ \(c\) で進むから、時刻 \(t\) に光が到達した点 \((x, y, z)\) は半径 \(ct\) の球面上にある(図 3.2「光の球面波面の時間発展」)。
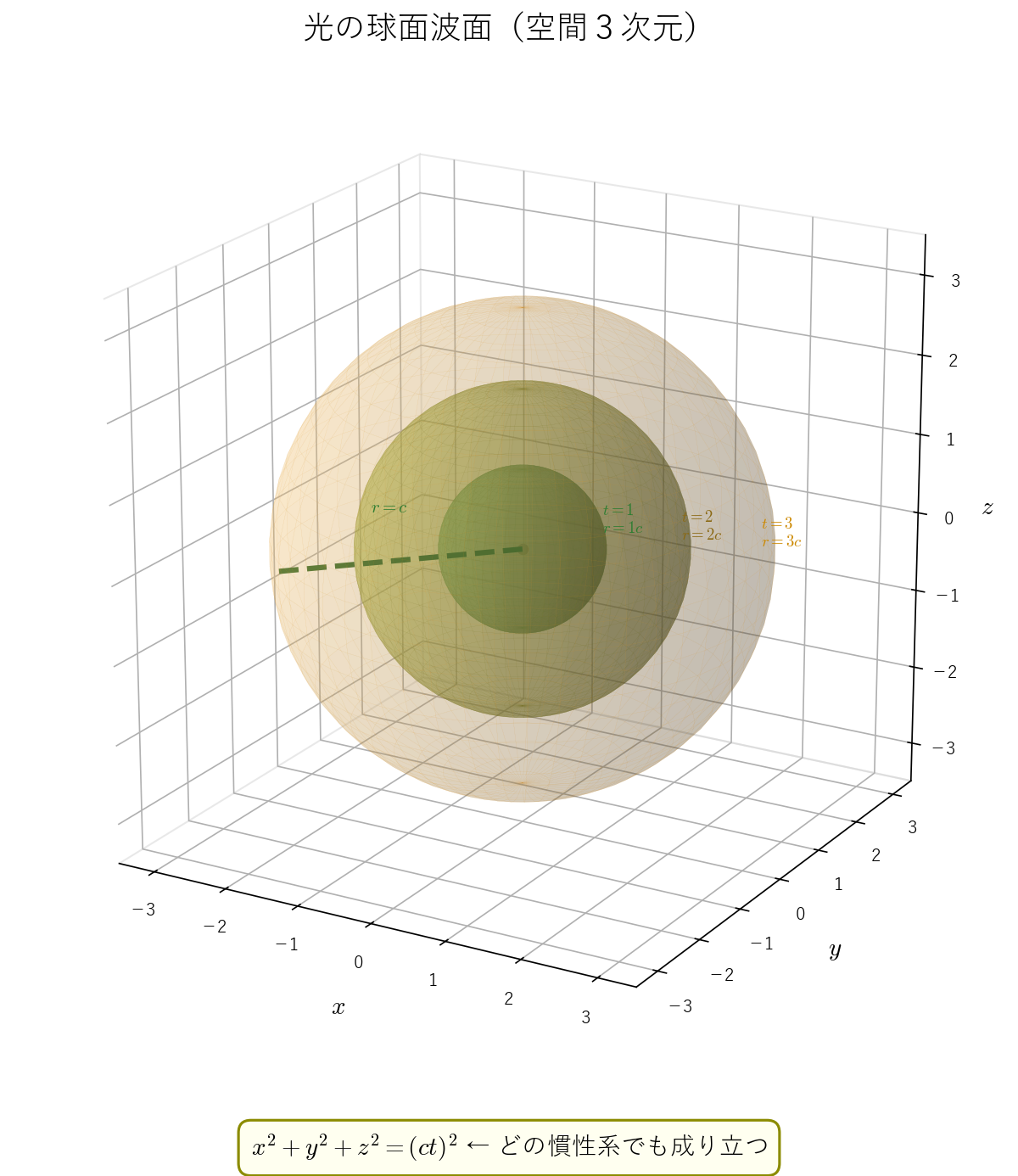
図 3.2: 光の球面波面の時間発展。原点の光源から発せられた光は、あらゆる方向に等速で広がり、時刻 \(t\) に半径 \(r = ct\) の球面上に到達する。\(t = 1, 2, 3\) の 3 つの時刻での球面を重ねて描いた。
🔵 カイ: 球面の半径が \(ct\) ってことは、\(x^2 + y^2 + z^2 = (ct)^2\) ですよね。でも別の慣性系で見たら、光源が動いてるから球の中心がずれて……球じゃなくなりませんか?
🟡 リナ: そこが光速不変のポイント。別の慣性系 \(S'\)(座標 \((t', x', y', z')\))で同じ光を観測しても、光速は \(c\) のまま。だから \(S'\) 系でも \(x'^2 + y'^2 + z'^2 = c^2 t'^2\) が成り立つ。どの慣性系で見ても光は球面状に広がる——図 3.2「光の球面波面の時間発展」で描いた球面が、\(S'\) 系でも(\(S'\) の原点を中心に)同じように見える。これが光速不変の具体的な意味よ。この事実から、時空の不変量の形が決まるの。
⚪ メイ: つまり、どの慣性系でも「自分を中心とした球面」に見える——それが光速不変の具体的な中身ね。
3.2 時空間隔の不変性¶
🟡 リナ: このセクションでは、まず光に対する不変量を求めるわ。光速不変の原理を使うと \(ds^2\) の形が一意に決まる。そのあと、\(ds^2\) の物理的意味(事象・光円錐・3分類)を確認してから、光以外の一般の場合にも \(ds^2\) が不変量であることを証明して、時空間隔の普遍性を確立する——という流れで進めるわね。でもその前に、不変量をどういう形で書くべきかという準備が必要。まずは「なぜ微小量の 2 乗で定義するのか」「なぜ 2 次の組み合わせなのか」を確認して、そのあと光速不変で符号を決める——という流れよ。
なぜ「微小距離の 2 乗」で定義するのか¶
🟡 リナ: では時空の不変量 \(ds^2 = -(cdt)^2 + dx^2 + dy^2 + dz^2\) の話に入る前に、まず「なぜこの形なのか」を確認しておきましょう。
🔵 カイ: 3 次元空間の不変量は距離 \(\ell = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2 + (z_2 - z_1)^2}\) でした。まず、どうして \(dx\) や \(dt\) といった微小量が出てくるんですか?
🟡 リナ: この先で扱う時空は曲がることを考慮する必要があるからよ。曲がっていると、この公式が使えないの。地球の表面を思い浮かべてみて。例えば東京とニューヨークの距離は、緯度・経度の差だけでは計算できないでしょう? 球面が曲がっているから。でも、足元のごく狭い範囲——1 メートル四方くらい——なら地面は平らに見えるわよね。
🔵 カイ: あ、だから微小量で書くんですね。曲がっていても、ごく小さい範囲なら平坦に見えるから。
🟡 リナ: その通り。曲がった空間でも、十分に小さな領域では局所的に平坦なの——Google Maps で地球表面を十分にズームインすると、曲率が見えなくなって平面の地図に見えるのと同じ発想ね。滑らかに曲がっている面なら、どんなに曲がっていても十分に小さい範囲を切り出せば平面で近似できる。だから、ごく近い 2 点の間の微小距離なら三平方の定理がそのまま使える:
有限の距離が必要なときは、この微小距離 \(d\ell\) を経路に沿って足し合わせ(積分し)ていけばいい——曲がった道の長さを、短い直線の足し算で近似するのと同じ発想ね。だから不変量を微小距離 \(d\ell\) の形で定義しておくのが、曲がった空間にも通用する普遍的な書き方なの。
🔵 カイ: では次の疑問。どうして時間の項の符号がマイナスになっているんですか? 空間の場合と同じ発想なら \(ds = \sqrt{(cdt)^2 + dx^2 + dy^2 + dz^2}\) と全部プラスで足しそうだけど——
🟡 リナ: そうよね。なぜマイナスなのかは、このあと光速不変の原理から導くわ。その前に一つ確認しておくと、時空の不変量はなぜ空間のように平方根 \(ds = \sqrt{\cdots}\) ではなく、2 乗の形 \(ds^2\) で定義しているのか。結論を先取りすると、時空の不変量には時間の項にマイナス符号がつく(理由はすぐ後で導出する)。すると平方根の中身が負になる場合がある——実数の範囲では負の数の平方根は定義できないわよね。だから時空では平方根をとる前の2 乗の形 \(ds^2\) で不変量を定義しているの。
⚪ メイ: なるほど、平方根をとれない場合があるから 2 乗のまま定義するのね。合理的だわ。
時空の不変量の形を絞り込む¶
🟡 リナ: ではなぜ時間の項の符号がマイナスなのかを見ていきましょう。3 次元空間の微小距離は \(d\ell^2 = dx^2 + dy^2 + dz^2\) だった。これを 4 次元の時空に拡張したとき、どんな形になるか? 二つの条件で絞り込んでいくわ。
条件 1:座標の「2 乗の和」の形であること¶
🟡 リナ: 3 次元の距離 \(d\ell^2 = dx^2 + dy^2 + dz^2\) を見ると、すべて座標の 2 乗の和になっている。これを時空に拡張するときも、座標の 2 乗の和の形を仮定しましょう。
🔵 カイ: なぜ 2 乗の形なんですか?
🟡 リナ: 直感的な理由は二つ。一つ目は方向に依存しないこと。「微小距離の2乗」と言ったけれど、もし仮に \(ds^2\) の中に 1 次の項——例えば \(dx\) のような項——が混ざっていたらどうなるか考えてみて。\((1, 0)\) 向き(\(x\) の正方向)に \(d\ell\) だけ動くと 1 次の項 \(dx\) の寄与は \(+d\ell\)。でも \((-1, 0)\) 向き(\(x\) の負方向)に同じ \(d\ell\) だけ動くと寄与は \(-d\ell\)——符号が変わってしまう。つまり 1 次の項は方向依存性を持つから、等方的な不変量には入れない。一方、\(dx^2 + dy^2\)(2 次)なら、\((+1, 0)\) 向きでも \((-1, 0)\) 向きでも \(d\ell^2\) で同じ値になる。
🔵 カイ: 確かに、ピタゴラスの定理が \(dx^2 + dy^2\) の形だったから、向きによらず距離が決まりますね。
🟡 リナ: 二つ目は、3 次以上の項は 2 次に比べて無視できるということ。微小距離の 2 乗 \(d\ell^2\) を考えているから、展開の最低次は 2 次。もし 3 次以上の項(例えば \(dx^3\) や \(dx^2 \cdot dy\) のような項)が混ざっていたらどうなるか——具体的に考えてみて。\(dx = 0.001\) のとき、\(dx^2 = 0.000001\)、\(dx^3 = 0.000000001\)。3 次の項は 2 次の項の 1000 分の 1 しかない。\(dx\) が小さいほどこの差は広がるから、2 次の式に 3 次以上の補正を加えても、微小極限では消えてしまう。まとめると、1 次はダメ(方向に依存する)、3 次以上は微小極限で 2 次に比べて無視できる——だから2 次が残る。
⚪ メイ: つまり「方向に寄らない最低次」が 2 次——だから不変量は 2 次の組み合わせなのね。
🟡 リナ: そう。4 次元の時空でも、不変量は座標の 2 乗の和の形
と仮定する。\(A, B, C, \ldots\) は決めるべき係数よ。
🔵 カイ: 交差項(\(C\) の項)もあるんですか?
🟡 リナ: 一般にはそういう項も考えられる。でも次の条件 2 で消えるの。
条件 2:空間の回転で形が変わらないこと¶
🟡 リナ: 物理法則は空間のどの方向にも同じ——これを等方性 (isotropy) と呼ぶ。だから不変量は、空間の座標軸をどう回転させても同じ形でなければならない。
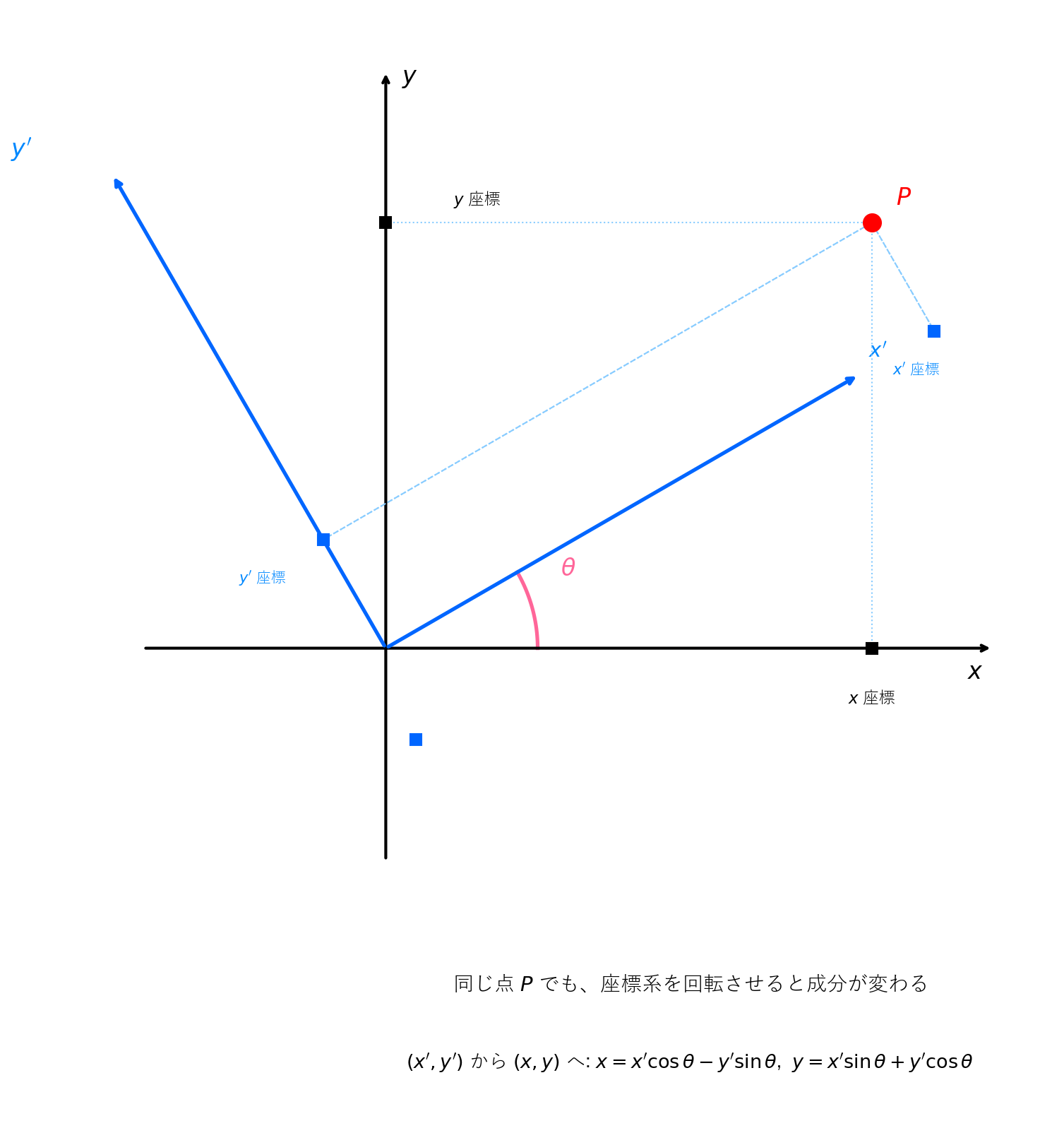
図 3.3: xy平面の座標回転と成分変換。同じ点 \(P\) でも、座標系を角度 \(\theta\) 回転させると成分が変わる。元の座標 \((x, y)\)(黒)と回転後の座標 \((x', y')\)(青)は、\(x = x'\cos\theta - y'\sin\theta\), \(y = x'\sin\theta + y'\cos\theta\) で結びつく(逆変換の形)。
具体的に見てみましょう。\(xy\) 平面で座標軸を角度 \(\theta\) だけ反時計回りに回した新しい座標 \((x', y')\) を考える。ある点 \(P\) の座標が新しい軸では \((x', y')\) だとすると、元の軸での座標 \((x, y)\) は
で結びつく。これは「新しい座標 \((x', y')\) が分かっているとき、元の座標 \((x, y)\) を求める」式——つまり逆変換の形で書いている。なぜ逆変換を使うかというと、このあと \(dx\,dy\) を新しい座標 \((dx', dy')\) で書き直したいから——\(dx = (\cdots)dx' + (\cdots)dy'\) の形が直接使えるのよ。この式は高校の数学 III で習う回転行列そのもので、\(\cos\theta\) と \(\sin\theta\) が出てくるのは、回転した軸への射影が三角関数で表されるから(図 3.3「xy平面の座標回転と成分変換」を見てね)。微小量 \(dx, dy\) についても同じ形が成り立つ。仮に \(dx\,dy\) という交差項が不変量に入っていたとして、回転後の座標で表してみると、
展開すると \((\cos^2\theta - \sin^2\theta)\,dx'\,dy'\) などの項が出てきて、元の \(dx\,dy\) とは違う形になってしまう。
⚪ メイ: 「回転しても形が同じ」という条件に反するのね。だから \(dx\,dy\) のような交差項はダメ。
🟡 リナ: 同じ理由で、\((cdt)(dx)\) のような時間と空間の交差項も、空間を回転させると \(dx\) が \(dx'\) と \(dy'\) に混ざって形が変わる。だからこれもダメ。
一方、\(dx^2 + dy^2 + dz^2\)(空間の 2 乗の和)は、回転しても必ず \(dx'^2 + dy'^2 + dz'^2\) に戻る——これがまさに 3 次元距離の不変性で、ピタゴラスの定理の言い換えよ。\((cdt)^2\) は空間成分を含まないから、空間の回転では何も変わらない。
結局、空間の回転で形が変わらない 2 次の組み合わせは、\(dx^2 + dy^2 + dz^2\) と \((cdt)^2\) の二つしかない。だから不変量は
の形に限られる。交差項が全部消えて、残るのは係数 \(A\) と \(B\) だけ——すっきりした形でしょう?
⚪ メイ: あとはこの \(A\) と \(B\) を決めればいいのね。
🟡 リナ: その通り。
✅ 理解度チェック: 時空の不変量 \(ds^2\) に \(dx\,dy\) や \((cdt)(dx)\) のような交差項が含まれないのはなぜでしょうか?
答え
空間の等方性(物理法則がどの方向にも同じ)から、不変量は空間の座標軸をどう回転させても同じ形でなければならない。\(dx\,dy\) のような交差項は座標回転で形が変わってしまうため、等方性の条件に反する。同様に \((cdt)(dx)\) も空間回転で \(dx\) が混合するため許されない。
光速不変でマイナス符号が決まる¶
🔵 カイ: \(A\) と \(B\) はどうやって決めるんですか?
🟡 リナ: ここで光速不変の原理を使う。まず、ある慣性系 \(S\) で光の微小変位を考えましょう。光は速さ \(c\) で進む。微小時間 \(dt\) の間に光が 3 次元空間で進んだ距離は \(\sqrt{dx^2 + dy^2 + dz^2}\)。一方、速さ \(c\) で \(dt\) だけ進んだ距離は \(c\,dt\)。この二つが等しいから、
両辺を 2 乗すると、任意の光線に沿った微小変位は
を満たす。これを「時空の不変量の形を絞り込む」で求めた \(ds^2 = A\,(cdt)^2 + B\,(dx^2 + dy^2 + dz^2)\) に代入すると、
⚪ メイ: つまり \(S\) 系では、光に対して \(ds^2 = (A+B)\,c^2\,dt^2\) になるのね。
🟡 リナ: 次に、光速不変の原理により、別の慣性系 \(S'\) でも光は同じ速さ \(c\) で進むから、\(S'\) 系でも
が成り立つ。そして相対性原理により、不変量の定義式の形はすべての慣性系で同じ——つまり \(S'\) 系でも同じ係数 \(A, B\) を使って \(ds'^2 = A\,(cdt')^2 + B\,(dx'^2 + dy'^2 + dz'^2)\) と書ける(\(S\) 系で \(A, B\) だったのに \(S'\) 系で別の係数になったら、「どの慣性系でも同じ物理法則」に反するわ)。これに代入すると、
\(S\) 系と同じ形で、\(dt\) が \(dt'\) に置き換わっただけね。
🔵 カイ: ここまでは両方の系で同じ形の式が出てきた。でもこれで不変量って言えるんですか? \(dt \neq dt'\) なら値が違うのでは?
🟡 リナ: まさにそこが次のポイント。私たちの目標は、\(ds^2\) をすべての慣性系で同じ値をとる不変量として定義すること。そのためには、光に対して \(S\) 系で \(ds^2 = 0\) なら \(S'\) 系でも \(ds'^2 = 0\) でなければならない。ところが今の計算結果を見ると、\(ds^2 = (A+B)\,c^2\,dt^2\) で \(ds'^2 = (A+B)\,c^2\,dt'^2\)。もし \(A + B \neq 0\) なら、\(ds^2 = ds'^2\) が成り立つには \((A+B)\,c^2\,dt^2 = (A+B)\,c^2\,dt'^2\)、つまり \(dt = dt'\) が必要になる。
🔵 カイ: あれ、\(dt = dt'\) なら Galilei 変換——つまり絶対時間——ですよね。
🟡 リナ: その通り。ここで論理の流れを整理しておくわ。今やりたいのは「\(A + B \neq 0\) だと矛盾する」ことを示すこと。\(A + B \neq 0\) なら \(ds^2 = ds'^2\) には \(dt = dt'\) が必要——でも \(dt = dt'\)(絶対時間)は光速不変と矛盾する。だから \(A + B \neq 0\) は不可能で、\(A + B = 0\) しかない。では「\(dt = dt'\) が光速不変と矛盾する」ことを具体的に見てみましょう。もし \(dt = dt'\)(絶対時間)が成り立つとする。\(t = t' = 0\) に両系の原点が一致した瞬間に光を発したとき、\(S\) 系では時刻 \(t\) に光の波面は \(S\) の原点を中心とする半径 \(ct\) の球面——つまり \(S\) の原点から全方向に等距離 \(ct\) にある点の集合。一方、\(S'\) 系の観測者にとっても光は自分の原点から出発した(\(t' = 0\) に原点にいたから)。光速不変により \(S'\) 系でも光はあらゆる方向に速さ \(c\) で進むから、\(S'\) 系では波面は \(S'\) の原点を中心とする半径 \(ct' = ct\) の球面——\(S'\) の原点から全方向に等距離 \(ct\) にある点の集合——になるはず。
🔵 カイ: でも \(S'\) の原点は \(S\) の原点から \(vt\) だけずれてますよね? 同じ球面が二つの中心を持つなんて無理では……
🟡 リナ: その通り。\(dt = dt'\) を仮定しているから、\(S\) 系と \(S'\) 系は同じ時刻 \(t\) に同じ空間を共有している。\(S'\) の原点は \(S\) の原点から \(vt\) だけずれている(\(v \neq 0\) なら \(vt \neq 0\))。ここで矛盾が生じる:同じ一つの波面(同じ点の集合)が、\(S\) の原点からも \(S'\) の原点からも全方向に等距離 \(ct\) にある、と言っている。具体的に考えてみて——もし波面が \(S\) の原点を中心とする球面なら、\(S'\) の原点(\(S\) の原点から \(vt\) だけずれた位置)から波面上の各点までの距離は方向によって異なるはず(近い側は \(ct - vt\)、遠い側は \(ct + vt\))。つまり \(S'\) の原点から見て「全方向に等距離 \(ct\)」にはなれない。しかし球面の中心は「その球面上の全ての点から等距離にある唯一の点」だから(中心が 2 つある球面は存在しない)、中心が \(vt\) だけずれた 2 点であることは不可能。だから \(A + B \neq 0\)(つまり \(dt = dt'\) を要求する選択)は、光速不変と両立しない。
⚪ メイ: 一方、\(A + B = 0\) なら \(ds^2 = 0\) かつ \(ds'^2 = 0\)。どちらもゼロだから、\(dt\) と \(dt'\) の関係がどうであろうと不変性が保証される。
🟡 リナ: そう。光速不変のもとで、どんな \(dt\)-\(dt'\) 関係とも両立する唯一の選択が \(A + B = 0\)——これが光速不変の原理が \(ds^2\) の形を決める本質的な役割よ。絶対時間が成り立たない状況で不変量を作るには、光に対して \(ds^2 = 0\) を選ぶしかない。
🔵 カイ: 逆に、光速不変がなくて Galilei 変換が成り立つ世界(\(dt = dt'\))だったら?
🟡 リナ: その場合は \(ds^2 = (A+B)\,c^2\,dt^2\) が \(A + B \neq 0\) でも慣性系によらない値になる——\(A\) と \(B\) の符号は独立で、\(A + B = 0\) という制約は出ない。マイナス符号は必要ない。光速不変が \(ds^2\) にマイナス符号を強制しているの。
論理の要点: ここまでの議論をまとめると、 1. 光は \(S\) 系でも \(S'\) 系でも同じ速さ \(c\) で進む(光速不変) 2. 光に対して \(ds^2 = (A+B)\,c^2\,dt^2\)、\(ds'^2 = (A+B)\,c^2\,dt'^2\) 3. \(S\) 系の \(dt\) と \(S'\) 系の \(dt'\) の関係はまだ決まっていない(\(dt = dt'\) とは限らない) 4. この未決定の関係と無関係に不変性(\(ds^2 = ds'^2\))が成り立つには、両辺がゼロでなければならない → \(A + B = 0\)
⚪ メイ: つまり \(A + B = 0\) と選べば、光に対して \(ds^2 = 0\) がどの慣性系でも成り立つ——不変量になる。だから \(A + B = 0\)、つまり \(A = -B\)。
🔵 カイ: 光に対して \(ds^2 = 0\) にするのが唯一の選択肢だったんですね。\(dt\) と \(dt'\) の関係が分からなくても不変性が保証される——ゼロはゼロだから。……でも逆に、光じゃない場合は \(ds^2 \neq 0\) ですよね。そのときも不変って言えるんですか?
🟡 リナ: いい疑問。それはこのセクションの最後で証明するわ。まずは \(B\) の符号と大きさを決めましょう。\(A = -B\) だから、\(B\) を決めれば \(A\) も自動的に決まる。\(B > 0\) と \(B < 0\) のどちらも数学的には許されるけど、\(B > 0\) を選べば空間部分 \(B(dx^2 + dy^2 + dz^2)\) が正——つまり空間的な距離が正の量になり、時間の項は \(A = -B < 0\) でマイナスになる。\(B < 0\) を選ぶと符号規約が \((+,-,-,-)\) になるだけで、物理的結論は同じ。大きさについては、\(B \neq 1\) でも座標の物差しを取り直せば \(B = 1\) の形に戻せる——つまり \(B\) の値は座標の単位の取り方に吸収できるの。たとえば \(B = 4\) のとき、空間座標を「1 メートル」から「0.5 メートル」に測り直す(\(dx \to 2\,dx\) とする)と、\(B\,dx^2 = 4 \cdot dx^2 = (2dx)^2\) になって、新しい物差しでは係数が 1 になる。だから物理的に意味があるのは符号だけで、\(B = 1\)(したがって \(A = -1\))と選んで、
⚪ メイ: マイナス符号は「光速が有限で一定」という条件から必然的に出てくるのね。さっきの説明をまとめると——Newton 力学では \(dt = dt'\) だから \(A + B = 0\) の制約は不要で、空間だけで不変量を作れた。光速不変を受け入れると絶対時間が崩れて、時間と空間を一緒に扱う不変量が必要になり、符号の違いが現れる。
🟡 リナ: その通り。これが時空の幾何学が Euclid (ユークリッド) 幾何と根本的に異なる理由よ。
✅ 理解度チェック: 時空間隔 \(ds^2 = -(cdt)^2 + dx^2 + dy^2 + dz^2\) で時間の項にマイナス符号がつく理由は?
答え
光速不変の原理から、光に対して \(ds^2 = 0\) がすべての慣性系で成り立つ必要がある。この条件を満たすには \(A + B = 0\)(つまり時間と空間の係数が逆符号)でなければならない。
🔍 Dive Deep:光速が慣性系ごとに違ったらどうなるか?
「光速が一定でなくても \(A + B = 0\) は導けるのでは?」と思うかもしれない。確かに、\(S'\) 系で光速が \(c'\) だとしても、\(S'\) 系の不変量を \(ds'^2 = A\,(c'dt')^2 + B\,(dx'^2+dy'^2+dz'^2)\) と定義すれば、光に対して \(ds'^2 = (A+B)\,c'^2\,dt'^2 = 0\) となり、\(A + B = 0\) は出る。
問題はその先にある。\(A + B = 0\) と \(B = 1\) を代入すると、\(S\) 系では \(ds^2 = -(cdt)^2 + dx^2+dy^2+dz^2\)。相対性原理により \(S'\) 系でも同じ形の式が成り立つはずだが、光速が \(c'\) なら \(ds'^2 = -(c'dt')^2 + dx'^2+dy'^2+dz'^2\) となる。\(c \neq c'\) なら、不変量の定義式に現れる定数が慣性系ごとに異なる値になる。これでは「すべての慣性系で同じ形の不変量」が存在しない——相対性原理に反する。
光速不変(\(c = c'\))のときだけ、\(ds^2 = -c^2\,dt^2 + dx^2+dy^2+dz^2\) という一つの式がすべての慣性系で通用する。光速不変は「\(A + B = 0\) を導くため」というより、「普遍的な時空間隔を定義するため」に必要なのである。
🟡 リナ: この \(ds^2\) のことを時空間隔 (spacetime interval) と呼ぶわ。
🔵 カイ: でもこれ、光の場合から導きましたよね。光じゃない普通の物体にも使えるんですか?
🟡 リナ: いい質問。実は、\(ds^2\) が光以外の場合にも慣性系によらない不変量であることは、別途証明できるの。このセクションの最後で証明するわ。
⚪ メイ: 光の場合は \(ds^2 = 0\)。そして慣性系を変えても \(ds'^2 = 0\)。つまり \(ds^2\) は、少なくとも光に対しては慣性系によらない量——不変量ね。
🟡 リナ: その通り。\(ds^2\) は「時空の中の二つの点の間の距離」に相当する量だと言ったわね。この「時空の中の点」に正式な名前をつけておきましょう——事象 (event) と呼ぶの。第 2 章のセクション 3 で紹介した時空図——空間座標 \((x, y, z)\) に時間軸 \(ct\) を加えた \((ct, x, y)\) の 3 次元——をもう一度使いましょう(図 3.4「時空図における事象と光円錐」)。
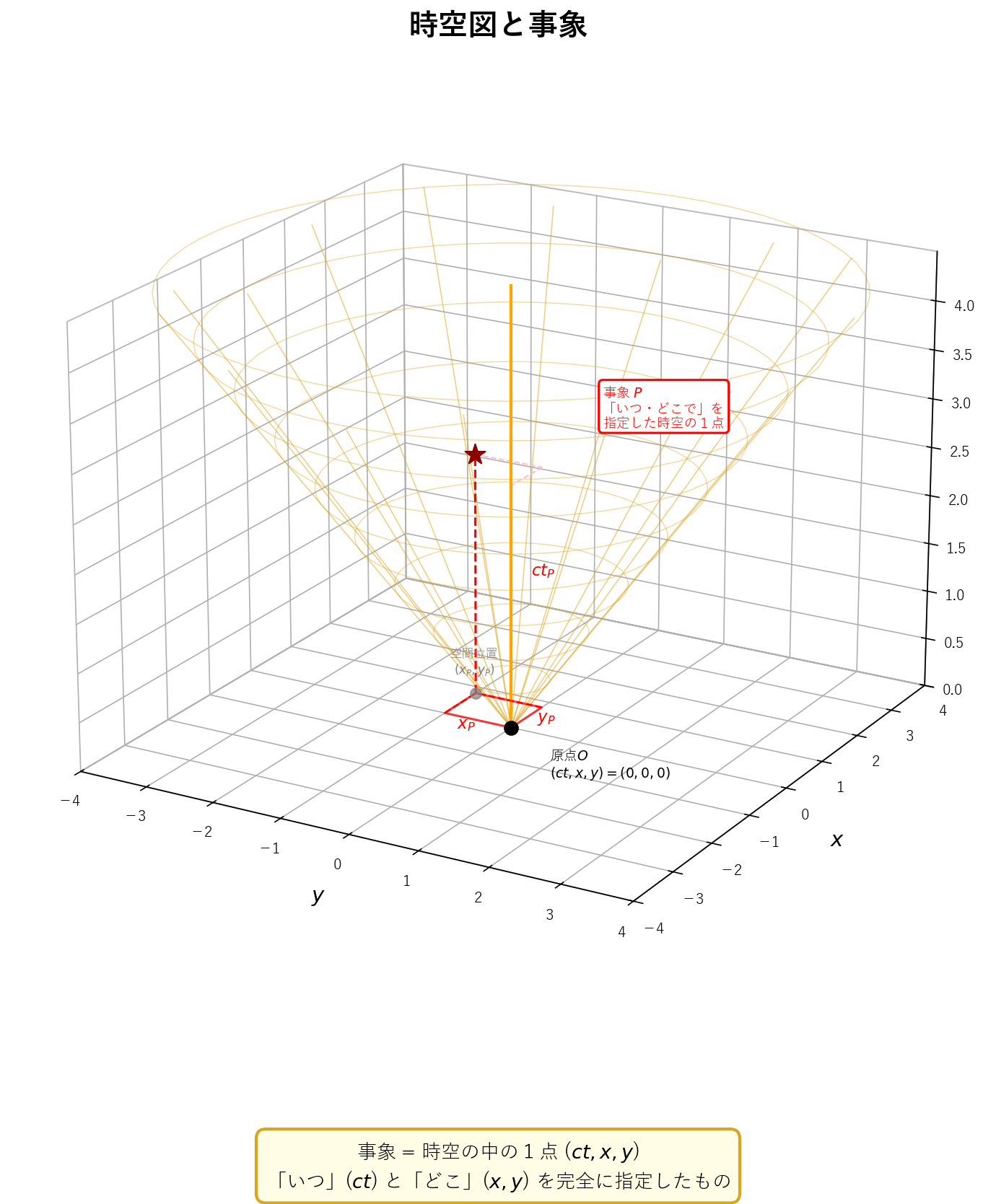
図 3.4: 時空図における事象と光円錐。\((ct, x, y)\) の 3 次元時空図。横の 2 軸 \((x, y)\) が空間、縦軸 \(ct\) が時間を表す。事象 \(P\) は「いつ」(\(ct_P\))と「どこ」(\(x_P, y_P\))を完全に指定した時空の中の 1 点。黄色の線は原点から出る光円錐。
🔵 カイ: 「事象」って、日常語の「出来事」とは違うんですか?
🟡 リナ: 物理学での事象は、時空の中の一つの点——つまり「いつ、どこで」を指定した \((t, x, y, z)\) の組のこと。「2026 年 4 月 30 日 12 時 00 分に、東京駅の改札前」のように、時刻と場所を完全に指定したものが一つの事象よ。大きさも持続時間もない、数学的な点。
⚪ メイ: 座標系によって \((t, x, y, z)\) の値は変わるけど、事象そのもの——時空の中のどの点か——は座標系に依存しない、ということね。
🟡 リナ: その通り。さっき定義した \(ds^2\) は、微小に離れた二つの事象の間の「時空の距離」に相当する量なの。ある事象 A を原点に置いて、そこから光を発したとする。光は \(ds^2 = 0\) を満たしながら進むから、時空図上で光の軌跡は原点から 45° の角度で広がる円錐面を描く——これを光円錐 (light cone) と呼ぶわ。光円錐が時空を 3 つの領域に分けるの(図 3.5「時空間隔の3分類」)。事象 B が光円錐の内側か外側かで、A との関係が決まる。
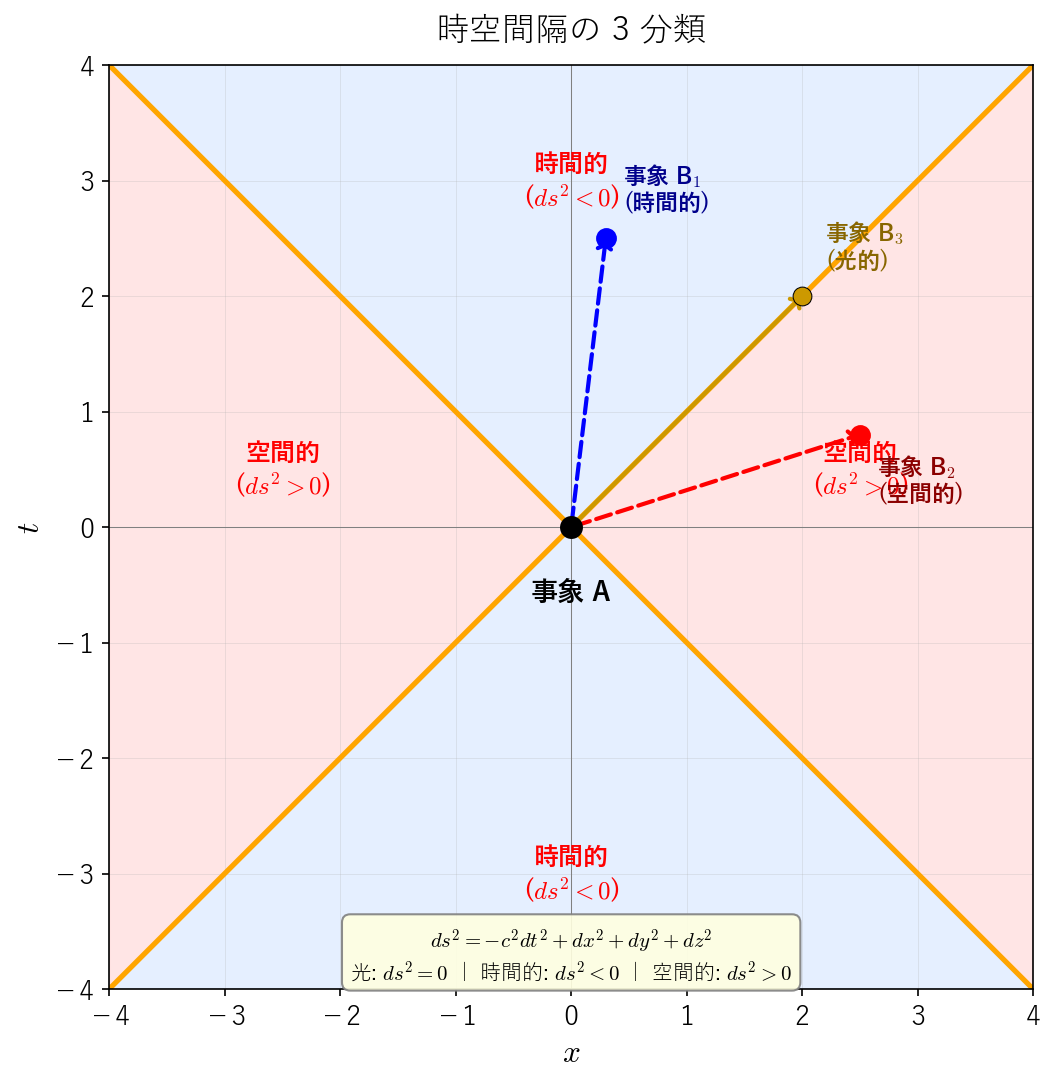
図 3.5: 時空間隔の3分類。事象 A を原点とする時空図。光円錐(黄色の線、\(ds^2 = 0\))が時空を 3 つの領域に分ける。事象 B₁ は時間的(\(ds^2 < 0\))、B₂ は空間的(\(ds^2 > 0\))、B₃ は光的(\(ds^2 = 0\))。
🟡 リナ: この 3 分類は物理的に深い意味を持つの。「因果関係」という言葉が出てくるけど、これは「一方の事象がもう一方の事象の原因になりうるか」ということ——つまり信号やモノが一方から他方に届くかどうか、という意味よ。
表 3.2: 時空間隔の3分類と物理的意味
| 分類 | 条件 | 物理的意味 |
|---|---|---|
| 時間的 (timelike) | \(ds^2 < 0\) | A と B の間を光速未満で移動できる。因果関係がありうる |
| 光的 (lightlike/null) | \(ds^2 = 0\) | A と B を光信号で結べる。光円錐上 |
| 空間的 (spacelike) | \(ds^2 > 0\) | A と B の間を光速以下では移動できない。因果関係はない |
🔵 カイ: 因果関係がないってどういうことですか?
🟡 リナ: 空間的に離れた二つの事象は、どんな信号でも一方から他方に到達できない。だから、一方が他方の原因になることは不可能——これが「因果関係がない」の意味よ。光円錐は「因果的に影響を及ぼせる範囲の境界」なの。
🔵 カイ: でも、光じゃない場合は? \(ds^2 \neq 0\) のときも \(ds^2 = ds'^2\) って言えるんですか?
\(ds^2\) がすべての場合に不変であることの証明¶
読み方のヒント: このセクションは少し数学的で難しい。証明の骨子だけつかめば、先に進んで問題ない。結論は「\(ds^2\) はどんな場合(光以外の物体)でも慣性系によらない不変量」——これだけ頭に入れておけば、次のセクション以降は読めるわ。
🟡 リナ: じゃあ証明しましょう。道筋は三つのステップよ。
証明の道筋: 1. \(ds^2\) と \(ds'^2\) は、座標の「2 乗の和」の形(2 次の組み合わせ)の関係で結ばれている 2. 光速不変から、\(ds^2 = 0\) のとき必ず \(ds'^2 = 0\)。これにより、\(ds'^2 = a(v)\,ds^2\) という比例関係が導ける 3. 三つの慣性系をつないで考えると、比例係数 \(a(v)\) が実は 1 でなければならないと分かる
ステップ 1:\(ds'^2\) は \(ds^2\) と同じ「2 次の組み合わせ」の形¶
🟡 リナ: まず、\(S\) 系の座標 \((t, x, y, z)\) と \(S'\) 系の座標 \((t', x', y', z')\) の関係を考えるわ。慣性系の間の変換は、座標の 1 次式——つまり \(t' = (\text{数})\cdot t + (\text{数})\cdot x + \ldots\) のような形——になる。
🔵 カイ: なぜ 1 次式なんですか?
🟡 リナ: 時空の一様性——どの場所・時刻でも物理法則が同じ——が要請するの。直感的に言えば、もし変換が 2 次式——例えば \(x' = ax^2 + bt\)——だったら、原点を \(x_0\) だけずらすと \(x' = a(x+x_0)^2 + bt\) で余計な 1 次の項 \(2ax_0 x\) が出てきて、変換の形が原点の選び方に依存してしまう。1 次式ならそういう問題は起きない——これは「二つの仮定」でもう一度丁寧に確認するわ。今はこの結論を使って先に進みましょう。1 次式同士を掛け合わせると 2 次式になるから、\(ds'^2 = -c^2 dt'^2 + dx'^2 + dy'^2 + dz'^2\) を元の座標 \((dt, dx, dy, dz)\) で書き直すと、やっぱり座標の 2 次の組み合わせ——\(dt^2, dx^2, dt\,dx, \ldots\) などの和——になるの。
⚪ メイ: つまり \(ds'^2\) も \(ds^2\) と同じ種類の数学的対象——座標の 2 次の組み合わせ——だから、両者を直接比較できるのね。
🟡 リナ: その通り。つまり \(S'\) 系の時空間隔は、\(S\) 系の座標で書くと
のような、\(S\) 系の座標の 2 次の組み合わせになる(係数 \(A', B', \ldots\) は \(S\) 系の \(A, B, \ldots\) と違う可能性がある)。
ステップ 2:光速不変から比例関係が出る¶
🟡 リナ: \(ds^2\) も \(ds'^2\) も、同じ \(S\) 系の座標 \((dt, dx, dy, dz)\) で書ける 2 次の組み合わせ。ここで光速不変の原理を使う。
光が伝播するとき、\(S\) 系では \(ds^2 = 0\)。光速不変により \(S'\) 系でも光速は \(c\) だから、同じ光の伝播に対して \(ds'^2 = 0\) も成り立つ。つまり、\(ds^2\) がゼロになる座標変化 \((dt, dx, dy, dz)\) に対して、\(ds'^2\) も必ずゼロになる——二つの式の「ゼロになる点の集合(零点集合)」が一致するの。
🔵 カイ: 零点集合が一致するだけで、\(ds'^2 = a(v)\,ds^2\) という比例関係が出るんですか?
🟡 リナ: 1 変数の 2 次式で考えてみて。\(f(x) = x^2 - 1\) と \(g(x) = 3x^2 - 3\) はどちらも \(x = \pm 1\) でゼロになる。実際、\(g(x) = 3 f(x)\)——つまり定数倍の関係。一般に、すべての根が一致する二つの 2 次式は定数倍しか違わない。なぜかというと、2 次式は \(a(x - r_1)(x - r_2)\) と因数分解できる(\(r_1, r_2\) が根)。根 \(r_1, r_2\) が同じなら、違いは先頭の係数 \(a\) だけ——つまり定数倍しか自由度がないの。
🔵 カイ: 1 変数なら分かりますけど、多変数でもそう言えるんですか? 変数が増えたら係数の自由度も増えるから、もっと色々な可能性がありそうですけど……。
🟡 リナ: 直感的にはこう考えて。具体的に 2 変数で見てみましょう。\(f = x^2 - y^2\) の零点集合——つまり \(f = 0\) を満たす点 \((x, y)\) の集まり——は \(x = \pm y\)、つまり 2 本の直線で、原点だけでなく面的に広がっている。もし別の 2 次式 \(g = ax^2 + bxy + cy^2\) が同じ零点集合(\(x = \pm y\) でゼロ)を持つなら、\(x = y\) を代入して \(a + b + c = 0\)、\(x = -y\) を代入して \(a - b + c = 0\)。この 2 式から \(b = 0\) かつ \(c = -a\)、つまり \(g = a(x^2 - y^2) = a \cdot f\)。零点集合が面的に広がっていると、あらゆる方向の情報が使えて、\(g\) は \(f\) の定数倍に限られるの。
逆に、もし \(f = x^2 + y^2\) のように全部プラスだったら、\(f = 0\) を満たすのは原点 \((0, 0)\) だけ。原点一点だけの情報では「\(g\) も原点でゼロ」としか言えず、\(g = 2x^2 + 3y^2\) のように係数の比が自由でも条件を満たせてしまう。
⚪ メイ: あ、だから \(ds^2\) のマイナス符号が効いているのね。不定符号だからこそ零点集合が広がって、比例関係が強制される。
🟡 リナ: そう。このように、正の項と負の項が混ざった 2 乗の式——例えば \(x^2 - y^2\) のように、全部プラスでも全部マイナスでもなく、プラスの項とマイナスの項が共存する 2 次式——を不定符号の 2 次形式 (indefinite quadratic form) と呼ぶ。ここで「2 次形式」とは、変数の 2 乗や変数同士の積だけからなる式(\(ax^2 + bxy + cy^2\) のような形)のこと。「不定符号」は、変数の値によって正にも負にもゼロにもなりうるという意味よ。不定符号の 2 次形式では、ゼロになる点の集まり(零点集合)が原点一点ではなく広がりを持つ——\(x^2 - y^2 = 0\) なら \(x = \pm y\) という 2 本の直線全体がゼロになる点の集まりよ。この「広がり」のおかげで、代入に使える点が豊富にあり、同じ零点集合を持つ別の 2 乗の式は定数倍に限られる。\(ds^2 = -(ct)^2 + x^2 + y^2 + z^2\) はまさにこの形——時間の項がマイナスで空間の項がプラスだから、不定符号の 2 次形式ね。
4 変数への拡張も同じ原理よ。2 変数では零点集合が 2 本の直線で、そこに代入するだけで全ての係数が決まった。4 変数では零点集合が光円錐——3 次元の「面」——になるから、代入に使える点がさらに豊富になり、係数はもっと強く制約される。具体的には、2 変数のときに \((1, 1)\) と \((1, -1)\) のペアを代入して交差項を消したのと同じ手法を、4 変数でも使う——光円錐上には \((1, 1, 0, 0)\) や \((1, -1, 0, 0)\) のように符号だけ違うペアが無数にあるから、それらを代入して引き算すれば交差項の係数がゼロだと分かるの。下の折りたたみで具体的に確認しているけれど、やっていることは 2 変数のときと同じ——「零点集合上の点を代入して、係数の連立方程式を解く」だけよ。
4 変数での具体的な確認(読み飛ばし可):
\(f = -t^2 + x^2 + y^2 + z^2\) の零点集合は \(t^2 = x^2 + y^2 + z^2\)(光円錐)。\(t = 1\) と固定すると、零点集合上の点は \(x^2 + y^2 + z^2 = 1\) を満たす——つまり 3 次元の単位球面上のすべての点が零点集合に含まれる。例えば \((1, 1, 0, 0)\), \((1, -1, 0, 0)\), \((1, 0, 1, 0)\), \((1, 0, -1, 0)\), \((1, 0, 0, 1)\), \((1, 1/\sqrt{2}, 1/\sqrt{2}, 0)\) など、無数の点が使える。
もし別の 2 次式 \(g = At^2 + Bx^2 + Cy^2 + Dz^2 + Etx + Fty + \ldots\)(交差項も含む)がこれら全ての点でゼロなら、交差項の係数を決定できる。やり方は「符号だけが違う点のペアを代入して引き算する」こと。なぜ引き算で交差項が消えるかというと、交差項 \(Etx\) は \(t\) と \(x\) の積だから、\(x\) の符号を反転すると \(Etx\) の符号だけが変わり、\(t^2\) や \(x^2\) の項は変わらないの。具体的に見てみましょう。\((1,1,0,0)\) を代入すると \(A \cdot 1 + B \cdot 1 + E \cdot 1 \cdot 1 = A + B + E = 0\)。次に \(x\) の符号だけ反転した \((1,-1,0,0)\) を代入すると \(A \cdot 1 + B \cdot 1 + E \cdot 1 \cdot (-1) = A + B - E = 0\)。この 2 式を引き算すれば \((A+B+E) - (A+B-E) = 2E = 0\)、つまり \(E = 0\)(\(tx\) の交差項の係数がゼロ)。\(A + B\) の部分は両方の式で同じだから引き算で消え、\(E\) だけが残る——これが「ペアを使って交差項を分離する」仕組みよ。同じ手法で \((1,0,1,0)\) と \((1,0,-1,0)\) から \(F = 0\)(\(ty\) の交差項)が出る。\(xy\) の交差項も同じ手法で消せる。\(g\) に \(xy\) の交差項 \(Gxy\) があるとして、\((1, 1/\sqrt{2}, 1/\sqrt{2}, 0)\) を代入すると \(G \cdot (1/\sqrt{2})(1/\sqrt{2}) = G/2\) の寄与があり、\((1, 1/\sqrt{2}, -1/\sqrt{2}, 0)\) を代入すると \(G \cdot (1/\sqrt{2})(-1/\sqrt{2}) = -G/2\) の寄与がある。2 式を引き算すれば \(G = 0\) が出る——こうして全ての交差項がゼロになる。
対角成分については、\((1,1,0,0)\) と \((1,0,1,0)\) がどちらも零点集合上にあることから \(A + B = 0\) と \(A + C = 0\) が出て、\(B = C\)。同様に \(C = D\) も示せるから \(B = C = D\)。結局 \(g = A(-t^2 + x^2 + y^2 + z^2) = (-A) \cdot f\)——\(f\) の定数倍に限られる。
ここまでの結論: 零点集合が面的に広がる不定符号の 2 次形式では、同じ零点集合を持つ別の 2 次形式は定数倍しか違わない。4 変数でも「ペア代入 → 引き算」で全ての係数が決まる。
2 変数のときと同じように代入を繰り返すことで、\(g\) の全ての係数が \(f\) の定数倍に限られることが示せるの。厳密な証明は線形代数の教科書に譲るけれど、結論として
という比例関係が成り立つ。\(v\) は二つの慣性系の相対速度の大きさ、\(a(v)\) は比例係数よ。
🔵 カイ: 係数 \(a\) って、速度の向きにも依存するんですか?
🟡 リナ: いい質問。空間の等方性——物理法則はどの方向にも同じ——を思い出して。もし \(a\) が速度ベクトル \(\vec{v}\) の方向に依存するなら、ある方向に動いたときと別の方向に動いたときで \(ds'^2\) の値が変わってしまう。それは等方性に反する。だから \(a\) は速度の大きさ \(v = |\vec{v}|\) だけの関数なの。
⚪ メイ: なるほど、\(a = a(v)\) ね。
🟡 リナ: これでステップ 2 は完了。残るはステップ 3——\(a(v) = 1\) を示すこと。
ステップ 3:三つの慣性系をつなぐと \(a(v) = 1\) が出る¶
🟡 リナ: 三つの慣性系 \(S_1\), \(S_2\), \(S_3\) を考えるわ。\(S_1\) から見て \(S_2\) は速度 \(\vec{v}_1\)(速さ \(v_1\))で動いていて、\(S_2\) から見て \(S_3\) は速度 \(\vec{v}_2\)(速さ \(v_2\))で動いているとする。
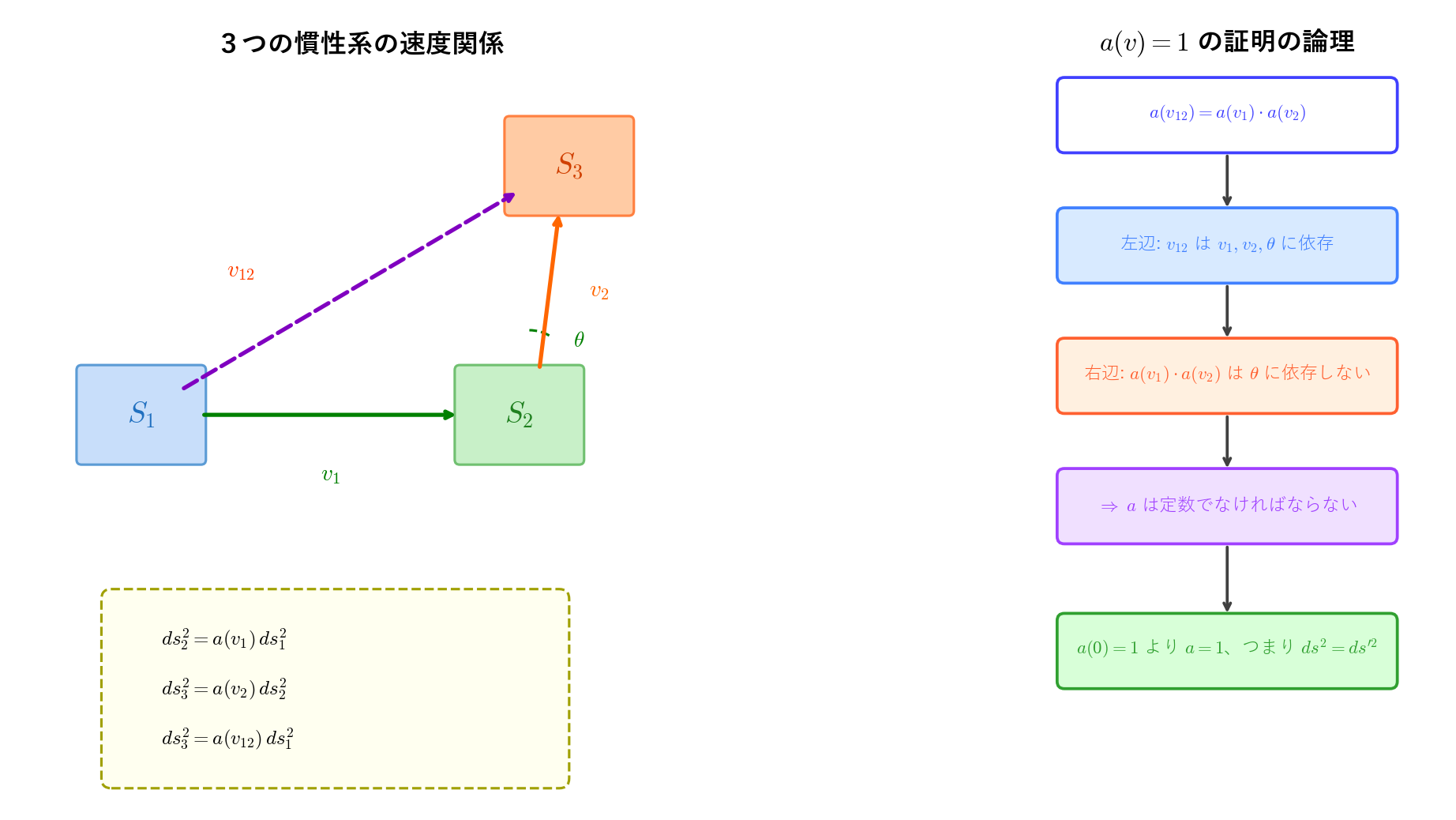
図 3.6: 慣性系の速度合成と不変性の証明。左 — 3 つの慣性系 \(S_1, S_2, S_3\) の速度関係。\(S_1\) から \(S_2\) への速度 \(\vec{v}_1\) と \(S_2\) から \(S_3\) への速度 \(\vec{v}_2\) の間の角度 \(\theta\) が合成速度 \(v_{12}\) に影響する。右 — \(a(v_{12}) = a(v_1) \cdot a(v_2)\) の左辺は \(\theta\) に依存するが右辺は依存しないため、\(a\) は定数でなければならず、\(a(0) = 1\) から \(a = 1\) が導かれる。
🟡 リナ: ステップ 2 の比例関係を各慣性系間に適用すると、
- \(S_1 \to S_2\):\(ds_2^2 = a(v_1)\,ds_1^2\)
- \(S_2 \to S_3\):\(ds_3^2 = a(v_2)\,ds_2^2\)
二つを組み合わせると、
一方、\(S_1\) から \(S_3\) へ直接変換すれば、\(S_3\) が \(S_1\) から見たときの速さを \(v_{12}\) として、
これら二つの表現が同じ \(ds_3^2\) を表すから、
🔵 カイ: \(v_{12}\) って、\(S_1\) から見た \(S_3\) の速さですよね? でもそれは \(v_1\) と \(v_2\) の大きさだけじゃなくて、\(\vec{v}_1\) と \(\vec{v}_2\) の向きの関係——角度 \(\theta\)——にも依存するはず。
🟡 リナ: その通り。例えば \(v_1 = v_2 = 0.5c\) のとき、\(\vec{v}_1\) と \(\vec{v}_2\) が同じ向き(\(\theta = 0\))なら \(v_{12}\) は大きくなり、直角(\(\theta = \pi/2\))なら \(\sqrt{v_1^2 + v_2^2}\) 程度、逆向き(\(\theta = \pi\))なら 0 に近づく。\(v_{12}\) は \(v_1, v_2, \theta\) の 3 つに依存するの。
ここで \(a(v_{12}) = a(v_1)\cdot a(v_2)\) という式をもう一度見て。
⚪ メイ: 左辺は \(\theta\) に依存する(\(v_{12}\) が \(\theta\) に依存するから)けど、右辺は \(\theta\) をまったく含まない(\(v_1\) と \(v_2\) だけで決まる)。
🟡 リナ: そこが決定的なポイント。右辺 \(a(v_1) \cdot a(v_2)\) は \(\theta\) を含まない——\(v_1\) と \(v_2\) だけで決まる定数よ。一方、左辺 \(a(v_{12})\) は \(\theta\) を通じて変わりうる。でも左辺=右辺が任意の \(\theta\) で成り立つなら、左辺も \(\theta\) によらない定数でなければならない。
🔵 カイ: つまり、\(v_{12}\) がどんな値をとっても \(a(v_{12})\) は同じ値を返す……ということは \(a\) は定数関数?
🟡 リナ: いい質問。もう少し丁寧に言うと、\(v_1\) と \(v_2\) を固定して \(\theta\)(\(\vec{v}_1\) と \(\vec{v}_2\) のなす角)を \(0\) から \(\pi\) まで連続的に変えれば、\(v_{12}\) もある最小値からある最大値まで連続的に変わる。例えば \(\vec{v}_1\) と \(\vec{v}_2\) が同じ向き(\(\theta = 0\))なら合成速度は最大になり、逆向き(\(\theta = \pi\))なら最小になる——\(v_1\) と \(v_2\) がどちらもゼロでなければ、最大値と最小値は異なる。
🔵 カイ: つまり \(\theta\) を動かすと \(v_{12}\) が連続的に変わる……でもなぜ「連続的」と言えるんですか?
🟡 リナ: 慣性系間の変換が座標の 1 次式(ステップ 1 で確認した線形性)であることから、二つの 1 次変換の合成もまた 1 次変換で、その係数は元の変換の係数の多項式——したがって連続関数——になる。つまり \(\theta\) を少し変えれば \(v_{12}\) も少しだけ変わることが保証されるの(速度合成の具体的な式とその \(\theta\) 依存性は練習問題 → 問題 M-5. 速度の合成則の導出 で確認してみて)。
重要なのは、\(\theta\) を動かすことで \(v_{12}\) が一つの値ではなく、ある範囲を取るということ。もし \(a\) が定数でなければ、\(v_{12}\) の値が変わるにつれて \(a(v_{12})\) も変わるはず——でも右辺は \(\theta\) によらない定数だから、それは不可能。
⚪ メイ: つまり \(a\) はその範囲で定数ね。
🟡 リナ: そう。具体的に言うと、\(v_1\) と \(v_2\) を固定して \(\theta\) を \(0\) から \(\pi\) まで動かすと、\(v_{12}\) はある最小値からある最大値まで連続的に変わる(Galilei 変換なら、\(\vec{v}_1\) と \(\vec{v}_2\) が逆向き(\(\theta = \pi\))のとき \(v_{12} = |v_1 - v_2|\)(最小)、同じ向き(\(\theta = 0\))のとき \(v_{12} = v_1 + v_2\)(最大)——相対論では少し修正されるが、いずれにせよ \(v_1, v_2 > 0\) なら最小値と最大値は異なる)。この範囲内で \(a\) は一定——つまり \(a\) は一つの値しか取らない。
次に、\(v_1\) や \(v_2\) を別の値に取り替えて同じ議論を繰り返すと、\(v_{12}\) が掃く範囲が変わる。例えば \(v_2 = 0.3c\) に固定して \(v_1\) を \(0.1c, 0.5c, 0.9c, \ldots\) と変えていけば、それぞれの \(v_1\) に対して \(\theta\) を動かしたときの \(v_{12}\) の範囲が異なる。
🔵 カイ: つまり、色々な \(v_1\) の値を試すことで、\(v_{12}\) が取りうる範囲をどんどん広げられるんですね。
🟡 リナ: その通り。具体的に言えば、\(v_1 = 0.1c\), \(v_2 = 0.3c\) のとき \(\theta\) を動かすと \(v_{12}\) はおよそ \(0.2c\) から \(0.4c\) の範囲を取り、\(v_1 = 0.9c\), \(v_2 = 0.3c\) のときは \(v_{12}\) がおよそ \(0.8c\) から \(0.95c\) の範囲を取る——このように \(v_1\) を変えると \(v_{12}\) の範囲がずれていき、全体として \([0, c)\) のほぼ全体をカバーする。\(v_{12}\) がゼロに近い領域も、\(v_1 \approx v_2\) で逆向き(\(\theta = \pi\))にすれば実現できるから、\([0, c)\) の下端付近も含めてカバーされるの。重なった部分では \(a\) の値が一致しなければならない——なぜなら \(a\) は「速さ \(v\) を入れたら一つの値を返す関数」だから、同じ \(v_{12}\) に対して二つの異なる値を返すことはできない。ある範囲で \(a\) が定数だと分かり、隣の範囲でも \(a\) が定数だと分かり、しかも重なりの部分で値が一致するなら、両方の範囲を合わせても \(a\) は同じ定数。これを繰り返せば、\(a\) は \([0, c)\) の全範囲で同じ定数になる。さらに \(v = 0\)(同じ慣性系、つまり変換しない)のとき、\(ds'^2 = ds^2\) だから \(a(0) = 1\)。定数で \(a(0) = 1\) なら、\(a = 1\)。
🟡 リナ: つまり、
光以外の場合も含めて、時空間隔 \(ds^2\) はすべての慣性系で同じ値をとる不変量——これが証明したかったことよ。
⚪ メイ: 空間の回転で「距離 \(dx^2 + dy^2\)」が不変だったのと同じ構造が、時空にもあるのね。ただし時間の項にマイナス符号がつくのが決定的な違い。
🟡 リナ: その通り。これが特殊相対論の幾何学的な核心よ。
✅ 理解度チェック: \(ds^2\) が光以外の場合にも不変量であることの証明で、比例係数 \(a(v) = 1\) が導かれる決め手は何でしょうか?
答え
三つの慣性系 \(S_1, S_2, S_3\) をつなぐと \(a(v_{12}) = a(v_1) \cdot a(v_2)\) が得られる。左辺の \(v_{12}\) は \(\vec{v}_1\) と \(\vec{v}_2\) の間の角度 \(\theta\) に依存するが、右辺は \(\theta\) を含まない。この等式が任意の \(\theta\) で成り立つには \(a\) が定数でなければならず、\(a(0) = 1\)(同じ慣性系では変換しない)から \(a = 1\) が結論される。
✅ 理解度チェック: 時空間隔 \(ds^2\) の符号による 3 分類のうち、\(ds^2 < 0\) の場合を何と呼び、物理的に何を意味するでしょうか?
答え
時間的 (timelike) と呼ぶ。二つの事象の間を光速未満で移動できることを意味し、因果関係がありうる。
符号規約の注意: この章では \(ds^2 = -c^2\,dt^2 + dx^2 + dy^2 + dz^2\) という \((-,+,+,+)\) 符号規約を採用する。逆の \((+,-,-,-)\) を使う教科書もあるが、物理的結論は同じ。自分が読んでいる文献がどちらかを常に確認する癖をつけよう。
参考文献の符号規約: 本「一般相対論」編の参考文献のうち、Tong, Schutz, Lancaster & Blundell は本「一般相対論」編と同じ \((-,+,+,+)\) を使う。一方、Hartle, 石井本, 佐藤本は逆の \((+,-,-,-)\) を使う。これらの教科書を参照する際は、\(ds^2\) や \(\eta_{\mu\nu}\) の符号が反転していることに注意すること。
3.3 Lorentz 変換の導出¶
🟡 リナ: セクション 2 で時空間隔 \(ds^2\) という不変量——0 階テンソル——を手に入れた。第 2 章の最後で「次は 1 階テンソル(4 元ベクトル)」と予告したわよね。
🔵 カイ: はい。次は 1 階テンソルですか?
🟡 リナ: その前に一つ、やっておきたいことがあるの。Newton 力学における不変量——距離 \(d\ell^2 = dx^2 + dy^2 + dz^2\)——は、Galilei 変換(等速直線運動する慣性系への乗り換え)に対して不変だった。ではセクション 2 で導出した不変量 \(ds^2\) は、どういう変換に対して不変なのか? 全体の見取り図を表にしておくわね。
表 3.3: 力学体系ごとの不変量と座標変換の対応
| Newton 力学 | 特殊相対論(この章) | 一般相対論 | ||
|---|---|---|---|---|
| 座標変換 | Galilei 変換 | Lorentz 変換 ← セクション 3 | 一般座標変換 | |
| 不変量 | 0 階テンソル(スカラー) | 距離 \(d\ell^2 = dx^2+dy^2+dz^2\) | 時空間隔 \(ds^2\) ← セクション 2 で導入済み | \(ds^2 = g_{\mu\nu}\,dx^\mu dx^\nu\) |
| 1 階テンソル(ベクトル) | 位置 \(\vec{r}\)、速度 \(\vec{v}\)、力 \(\vec{F}\) | 4 元速度 \(U^\mu\) ← 第 4 章 | 4 元ベクトル \(V^\mu\) | |
| 2 階テンソル(計量) | \(\delta_{ij}\)(Euclid 計量、\(i=j\) で 1、\(i\neq j\) で 0) | Minkowski 計量 \(\eta_{\mu\nu}\) ← 第 4 章 | 計量 \(g_{\mu\nu}\)(動的な場) |
⚪ メイ: Newton 力学の列は馴染みがあるから、それと対比すると特殊相対論で何が変わるかが見えるわね。そして一般相対論の列が最終目標。
🟡 リナ: というわけで、時空間隔 \(ds^2\) を不変に保つ変換である Lorentz (ローレンツ) 変換を定式化してみましょう。
✅ 理解度チェック: Newton 力学における不変量と座標変換の組み合わせは何でしょうか? 特殊相対論ではそれがどう変わるでしょうか?
答え
Newton 力学では不変量が空間距離 \(d\ell^2 = dx^2 + dy^2 + dz^2\) で、それを保つ座標変換が Galilei 変換。特殊相対論では不変量が時空間隔 \(ds^2 = -(cdt)^2 + dx^2 + dy^2 + dz^2\) で、それを保つ座標変換が Lorentz 変換に変わる。
問題設定 — 慣性系の乗り換えを式で表す¶
🟡 リナ: まず、Lorentz 変換が物理的に何を表す変換なのかをはっきりさせておきましょう。
二つの慣性系 \(S\) と \(S'\) を考える。\(S'\) は \(S\) に対して速度 \(\vec{v}\) で等速直線運動している。\(t = t' = 0\) に両系の原点が一致していたとする。
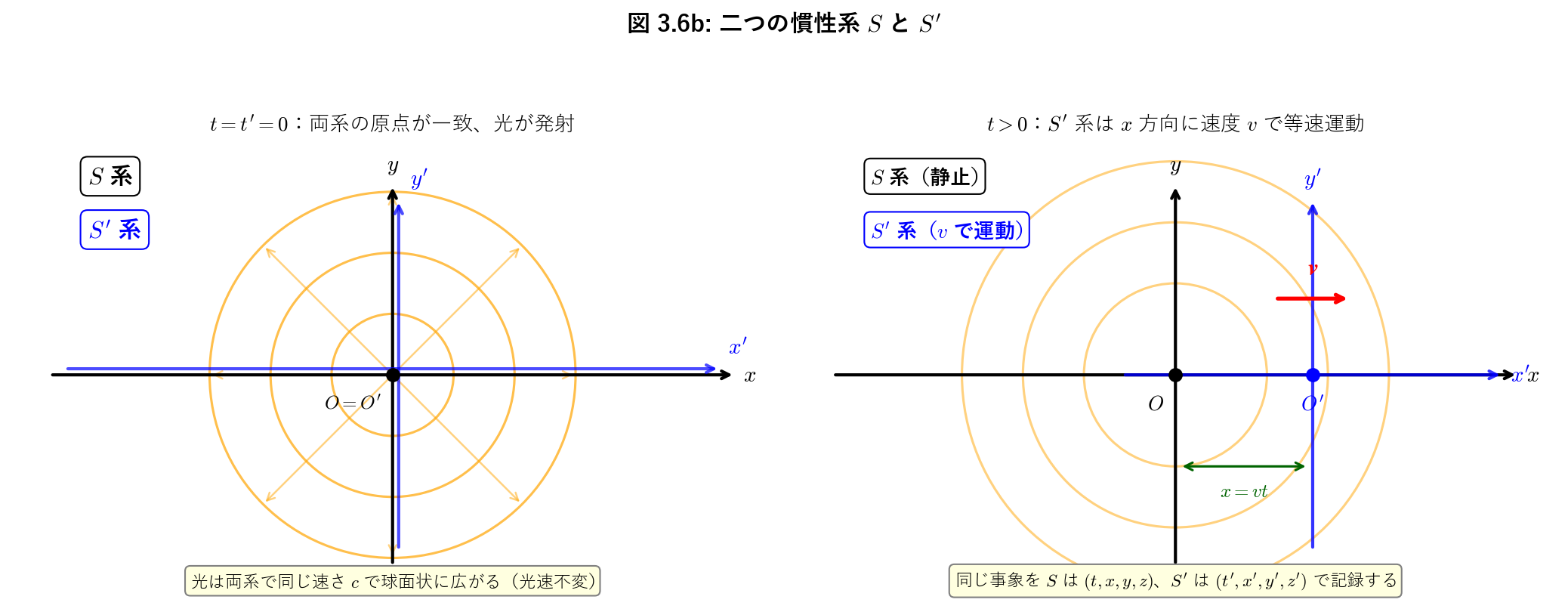
図 3.7: 二つの慣性系と光速不変の原理。慣性系 \(S\) と \(S'\)。\(S'\) は \(S\) に対して \(x\) 方向に速度 \(v\) で動いている。\(t=t'=0\) に両系の原点が一致し、その瞬間に原点から光が発せられた。光の波面はどちらの系から見ても球面状に広がる(光速不変の原理)。
同じ一つの事象(時空の点)を、\(S\) 系の観測者は \((t, x, y, z)\) という座標で、\(S'\) 系の観測者は \((t', x', y', z')\) という座標で記録する。この二つの座標の関係式を求めるのが、このセクションの目標よ。これが Lorentz 変換。
🔵 カイ: つまり「動いている人と止まっている人で、同じ出来事をどう記述し直すか」の式なんですね。
🟡 リナ: その通り。ここで物理的に重要なのは、この変換が「慣性系の乗り換え」を表すということ。3 次元の空間回転が「座標軸の向きを変える」変換だったのに対して、これは「動いている別の観測者に切り替える」変換。特別な名前がついていて、ブースト (boost) と呼ばれるわ。
⚪ メイ: 空間回転とブーストは、どちらも座標を変える変換だけど、物理的な意味が違うのね。
- 空間回転:同じ観測者が、座標軸の向きを変える
- ブースト:別の速度で動いている観測者に乗り換える
🟡 リナ: そう。では、ブーストの具体的な形を求めましょう。
✅ 理解度チェック: 空間回転とブーストの物理的な意味の違いは何でしょうか?
答え
空間回転は同じ観測者が座標軸の向きを変える変換。ブーストは別の速度で動いている観測者(別の慣性系)に乗り換える変換。どちらも座標を変える変換だが、ブーストは時間軸と空間軸を混ぜる点が本質的に異なる。
二つの仮定¶
🟡 リナ: 導出のために二つの仮定を置くわ。どちらも物理的に自然なものよ。
仮定 1(線形性): Lorentz 変換は座標の1 次式で書ける。
仮定 2(等方性): 相対速度 \(\vec{v}\) は \(x\) 方向だけを向いているとしても一般性を失わない。
🔵 カイ: なぜ 1 次式なんですか?
🟡 リナ: 時空の一様性——どの場所・時刻でも物理法則が同じ——が要請するの。3.2「時空間隔の不変性」で不変量の形を絞り込んだときにも同じ原理を使ったわね。具体例で見てみましょう。もし変換が 2 次式、例えば \(x' = ax^2 + bt\) だったとする。ここで原点を \(x_0\) だけずらして \(x \to x + x_0\) と置き換えると、
元の式にはなかった 1 次の項 \(2ax_0\,x\) が出てきてしまう。つまり、変換の形が原点の選び方 \(x_0\) に依存する——物理法則が場所によって違うことになってしまうの。
一方、1 次式 \(x' = ax + bt\) なら、\(x \to x + x_0\) としても \(x' = a(x + x_0) + bt = ax + bt + ax_0\) で、定数項が変わるだけ。変換の形(\(x\) と \(t\) の係数)は原点によらない。だから一様な時空では変換は 1 次式でなければならない。
⚪ メイ: 仮定 2 は、空間が等方的(どの方向も同等)だから、\(x\) 軸を相対速度の方向にとり直せば必ず実現できるのよね。
🟡 リナ: その通り。これで一般性を失わずに、以降は相対速度が \(x\) 方向だけの場合を考えればいい。仮定 1 より、変換は次の形に書ける:
係数は全部で 16 個。これを順番に絞り込んでいくわ。
対称性から係数を絞り込む¶
🟡 リナ: まず、\(y\) 軸と \(z\) 軸は相対運動の方向(\(x\) 方向)と直交しているので、これらの座標は変換で変わらないと仮定するのが自然よ。
🔵 カイ: なぜですか?
🟡 リナ: 相対運動が \(x\) 方向だけなら、\(y\) 方向と \(z\) 方向は「運動に関与しない方向」。この方向の長さや時刻が変わる理由がない——という対称性の議論よ。厳密には、「\(y \to -y\) や \(z \to -z\) の反転対称性」と「空間の等方性」から \(y' = y\), \(z' = z\) が導ける。詳しい証明は参考文献に譲るわ。
参考:\(y' = y\), \(z' = z\) の厳密な導出
Landau-Lifshitz『場の古典論』§4 や、砂川『理論電磁気学』§12 に詳しい。要点は、(1) 線形変換で \(y, z\) は \(y', z'\) の線形結合としか結びつかない、(2) 反転 \(y \to -y\) で物理が変わらないことから \(y\) と \(y'\) の比例係数は \(\pm 1\)、(3) 恒等変換(\(v = 0\))との連続性から \(+1\)、という流れ。
⚪ メイ: すると残る変換は
ね。
🟡 リナ: さらに、\(t'\) と \(x'\) にも \(y, z\) は入らないことが示せる。理由は同じで、\(y\)-反転や \(z\)-反転の対称性。もし \(t'\) に \(y\) が含まれていたら、\(y \to -y\) で \(t'\) が変わってしまい、\(y\) 方向の正負で時間の進み方が違うという非対称性が生じる。これは等方性に反する。\(x'\) についても同様。
結果として、変換は次の形に絞られる:
ここで各係数の次元を確認しておくと、\(t' = a_1 t + a_2 x\) の左辺は時間の次元だから、\(a_1 t\)(時間)と \(a_2 x\)(\(a_2\) × 長さ)もどちらも時間の次元を持つ必要がある。よって \(a_1\) は無次元、\(a_2\) は \([\text{時間}/\text{長さ}] = [1/\text{速度}]\) の次元。同様に \(x' = a_5 t + a_6 x\) から \(a_5\) は \([\text{長さ}/\text{時間}] = [\text{速度}]\) の次元、\(a_6\) は無次元。
🔵 カイ: 16 個あった係数が 4 個にまで減りましたね。
\(S'\) 系の原点の運動から 1 つ決まる¶
🟡 リナ: \(S\) 系から見ると、\(S'\) 系の原点(\(x' = 0\))は時刻 \(t\) に \(x = vt\) の位置にある。\(x' = 0\) と \(x = vt\) を \(x' = a_5\,t + a_6\,x\) に代入すると、
よって
と書ける。
⚪ メイ: \(a_5 = -a_6 v\) で \(a_5\) が消えたから、未知数は \(a_1, a_2, a_6\) の 3 個になったわね。
🔵 カイ: 16 個が一気に 3 個まで減った……対称性って強力ですね。
\(ds^2\) の不変性から残りが決まる¶
🟡 リナ: ここでセクション 2 で確立した \(ds^2\) 不変を使うわ。
\(y' = y\), \(z' = z\) なので \(dy'^2 + dz'^2 = dy^2 + dz^2\) は両辺で打ち消し合い、\(t\)-\(x\) 方向の関係だけが残る:
微小変位も同じ 1 次変換に従うから、
代入して整理すると、
左辺を展開して \(dt^2\)、\(dx^2\)、\(dt\,dx\) の係数を右辺と比較するの。
⚪ メイ: 展開してみるわ。左辺の第 1 項 \(-(c\,a_1\,dt + c\,a_2\,dx)^2\) は
第 2 項 \(a_6^2(dx - v\,dt)^2\) は
🔵 カイ: \((a + b)^2 = a^2 + 2ab + b^2\) を使ってるだけだけど、項が多くて混乱しそう……。
🟡 リナ: 大丈夫。やっていることはシンプルよ——左辺を全部展開して \(dt^2\), \(dx^2\), \(dt\,dx\) の 3 種類に整理し、右辺 \(-(c\,dt)^2 + dx^2 = -c^2\,dt^2 + dx^2\) の対応する係数と見比べるだけ。「同じ種類の項の係数は等しい」——多項式の恒等式と同じ発想ね。
\(dt^2\) の係数:
\(dx^2\) の係数:
\(dt\,dx\) の係数(交差項):
⚪ メイ: この 3 つの連立方程式を解けばいいのね。
🟡 リナ: そう。交差項の式 \(-2c^2 a_1 a_2 - 2a_6^2 v = 0\) を \(a_2\) について解くと、\(a_2 = -a_6^2 v/(c^2 a_1)\)。これを \(dx^2\) の式 \(-c^2 a_2^2 + a_6^2 = 1\) に代入すると、
🔵 カイ: うーん、未知数が \(a_1\) と \(a_6\) の二つあって、式が一つだけだと解けないですよね?
🟡 リナ: その通り。だからもう一つの式——\(dt^2\) の係数の式——も使うの。\(-c^2 a_1^2 + a_6^2 v^2 = -c^2\) を整理すると \(c^2(a_1^2 - 1) = a_6^2 v^2\)、つまり
が得られる。ここから \(a_6^2 v^2 = c^2(a_1^2 - 1)\) なので、上の式に出てきた \(a_6^2 v^2/(c^2 a_1^2)\) にこれを代入すると、
⚪ メイ: すると上の式 \(a_6^2\!\left(1 - \frac{a_6^2\,v^2}{c^2\,a_1^2}\right) = 1\) に代入すると、\(a_6^2\!\left(1 - \left(1 - \frac{1}{a_1^2}\right)\right) = a_6^2 \cdot \frac{1}{a_1^2} = 1\)、つまり \(a_6^2 = a_1^2\)、すなわち \(a_6 = \pm a_1\) ね。
🟡 リナ: \(\pm\) のどちらを選ぶかは物理で決まる。\(v \to 0\) で恒等変換(\(x' = x\))に戻るには \(a_6 = +a_1\) が必要よ。\(a_6 = a_1\) を \(dt^2\) の式 \(-c^2 a_1^2 + a_6^2 v^2 = -c^2\) に戻すと \(-c^2 a_1^2 + a_1^2 v^2 = -c^2\)。左辺を \(a_1^2\) でくくると \(a_1^2(-c^2 + v^2) = -c^2\)、つまり \(a_1^2(c^2 - v^2) = c^2\)。両辺を \(c^2 - v^2\) で割って
よって
(\(a_2\) は交差項の式 \(a_2 = -a_6^2 v/(c^2 a_1)\) に \(a_6 = a_1\) を代入して \(a_2 = -a_1 v/c^2\) から得られる。)詳しい途中計算は練習問題でも確認してみて(→ 問題 M-1. Lorentz 変換の係数決定の詳細計算)。
🔵 カイ: \(a_6 = \pm\) の符号はどう決まるんですか?
🟡 リナ: 良い疑問。\(v \to 0\) で恒等変換(\(t' = t\), \(x' = x\))に戻ってほしいので \(a_6 = +1/\sqrt{\cdots}\) を選ぶ。マイナスを選ぶと空間反転が入った変換になってしまう。
Lorentz 変換の完成¶
🟡 リナ: ここで Lorentz 因子 (Lorentz factor)
と無次元速度(ベータ) \(\beta \equiv v/c\) を導入すると、変換は次のようにすっきり書ける:
行列で書くと、
これが \(x\) 方向のブーストを表す Lorentz 変換よ。
🔵 カイ: 第 1 章で Galilei 変換 \(x' = x - vt\), \(t' = t\) が出てきましたよね。\(v \ll c\) のとき \(\gamma \approx 1\)、\(\beta \approx 0\) で、\(t'\) の式の \(\beta\,x/c\) の項も無視できるから……Galilei 変換に戻る! でも逆に、\(v\) が \(c\) に近づくとどのくらい違いが出るんですか?
🟡 リナ: いい疑問ね。Lorentz 変換は Galilei 変換の「光速を考慮した修正版」なの。日常的な速度では違いが見えないけれど、\(v\) が \(c\) に近づくと劇的に効いてくる。二つの変換の対比を表にまとめておくわ。
表 3.4: Galilei 変換と Lorentz 変換の比較
| Galilei 変換 | Lorentz 変換 | |
|---|---|---|
| 時間の変換 | \(t' = t\)(絶対時間) | \(ct' = \gamma(ct - \beta\,x)\) |
| 空間の変換 | \(x' = x - vt\) | \(x' = \gamma(x - \beta\,ct)\) |
| 保つ不変量 | 空間距離 \(dx^2 + dy^2 + dz^2\) | 時空間隔 \(-(cdt)^2 + dx^2 + dy^2 + dz^2\) |
| 時間と空間の関係 | 完全に独立 | 混ざり合う |
| 速度の足し算 | \(v_{12} = v_1 + v_2\) | \(v_{12} = \dfrac{v_1 + v_2}{1 + v_1 v_2/c^2}\)(Lorentz 変換を 2 回適用すれば導ける。導出は練習問題 → 問題 M-5. 速度の合成則の導出。\(v_1, v_2 \ll c\) で Galilei の式に戻り、\(v_1 = v_2 = c\) でも \(v_{12} = c\)——光速を超えない) |
| 有効な範囲 | \(v \ll c\) | 任意の \(v < c\) |
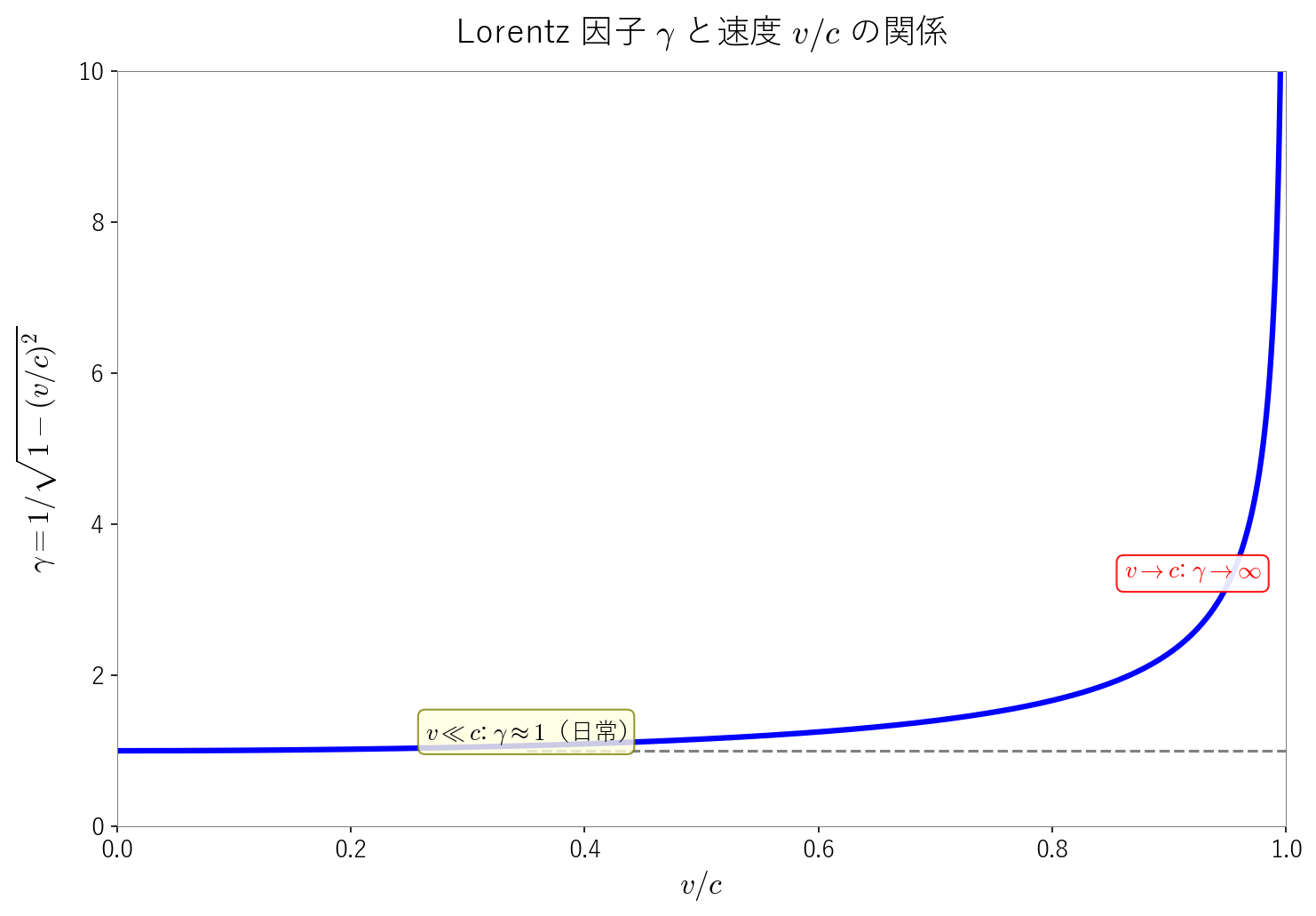
図 3.8: ローレンツ因子と速度の関係。Lorentz 因子 \(\gamma = 1/\sqrt{1 - v^2/c^2}\) は速度が光速に近づくにつれて急激に増大する。日常的な速度(\(v \ll c\))では \(\gamma \approx 1\) だが、\(v \to c\) で \(\gamma \to \infty\)。
🔵 カイ: 図 3.8「ローレンツ因子と速度の関係」を見ると、\(\gamma\) が \(v \to c\) で無限大に発散してますね。ってことは、\(v = c\) ちょうどには到達できないんですか?
🟡 リナ: その通り。質量のある物体を光速まで加速するには無限のエネルギーが必要になる——これは第 4 章でエネルギーと運動量の関係を導くときに定量的に見るわ。
✅ 理解度チェック: Lorentz 変換が Galilei 変換に帰着するのはどのような極限でしょうか?
答え
\(v \ll c\)(速度が光速に比べて十分小さい)の極限。このとき \(\gamma \approx 1\) となり、\(t' \approx t\), \(x' \approx x - vt\) で Galilei 変換に戻る。
幾何学的解釈 — ブーストは時空の「双曲線回転」¶
🟡 リナ: ここまでで Lorentz 変換の具体形が得られた。でも、この行列を眺めていると一つの構造が見えてくる——式の形が 3 次元の空間回転とそっくりなの。
🔵 カイ: 空間回転と……ブーストが似てるんですか?
🟡 リナ: 比べてみましょう。\(xy\) 平面での座標回転(座標軸を角度 \(\theta\) だけ反時計回りに回す変換)は、
(3.2「時空間隔の不変性」では「\((x', y')\) を使って \((x, y)\) を表す」逆変換の形で書いた。ここではブーストとの比較のために「\((x, y)\) から \((x', y')\) を求める」順変換の形で書いている。セクション 2 の式 \(x = x'\cos\theta - y'\sin\theta\), \(y = x'\sin\theta + y'\cos\theta\) を \((x', y')\) について解くと \(x' = x\cos\theta + y\sin\theta\), \(y' = -x\sin\theta + y\cos\theta\) が得られる。確認:\(x'^2 + y'^2 = (x\cos\theta + y\sin\theta)^2 + (-x\sin\theta + y\cos\theta)^2\)。展開すると \(x^2\cos^2\theta + 2xy\cos\theta\sin\theta + y^2\sin^2\theta + x^2\sin^2\theta - 2xy\sin\theta\cos\theta + y^2\cos^2\theta = x^2(\cos^2\theta + \sin^2\theta) + y^2(\sin^2\theta + \cos^2\theta) = x^2 + y^2\)。)
これは不変量 \(x^2 + y^2\) を保つ。一方、\(t\)-\(x\) 方向の Lorentz 変換(ブースト)は、
これは不変量 \(-(ct)^2 + x^2\) を保つ。行列の構造が似ている——対角成分が等しく、非対角成分の絶対値も等しい。ただし回転行列は非対角成分の符号が互いに逆(\((1,2)\) 成分が \(+\sin\theta\)、\((2,1)\) 成分が \(-\sin\theta\))であるのに対し、ブーストの行列は非対角成分が同符号(どちらも \(-\sinh\varphi\))。なぜこの違いが生じるかというと、回転が保つ不変量は \(x^2 + y^2\)(全部プラス)で、ブーストが保つ不変量は \(-(ct)^2 + x^2\)(符号が混在)——この符号構造の違いが行列の対称性に反映されているの。
⚪ メイ: 違いは、空間回転は \(\cos^2\theta + \sin^2\theta = 1\)(プラス)、ブーストは保つ不変量の符号がマイナスとプラスの組み合わせだから……何か違う恒等式が使えそう。
🟡 リナ: その通り。ここで新しい関数を導入するわ。三角関数 \(\cos\theta, \sin\theta\) は単位円 \(x^2 + y^2 = 1\) のパラメータ表示だった(\(x = \cos\theta, y = \sin\theta\) と置くと \(x^2 + y^2 = 1\) が自動的に満たされる)。同じように、単位双曲線 \(x^2 - y^2 = 1\) についても、一つの変数 \(\varphi\) を動かすだけで曲線上の点 \((x, y)\) を全部表せる関数がある——それが双曲線関数 (hyperbolic function) よ:
この定義は天下り的に見えるかもしれないけれど、発想はシンプルよ。\(x^2 - y^2 = 1\) を満たす \((x, y)\) を一つのパラメータ \(\varphi\) で表したい——三角関数が \(\cos^2\theta + \sin^2\theta = 1\) を自動的に満たしたのと同じ発想ね。
🔵 カイ: 三角関数の方は単位円だから \(+\) で、こちらは双曲線だから \(-\) なんですね。具体的にどうやってこの形にたどり着くんですか?
🟡 リナ: まず \(x^2 - y^2\) を因数分解すると \((x+y)(x-y) = 1\)。つまり「\(x+y\) と \(x-y\) を掛けたら 1」になればいい。そこで、掛けて 1 になる関数のペアを探したい。高校で習った指数法則 \(e^a \cdot e^b = e^{a+b}\) を思い出して——\(a\) と \(b\) の和がゼロになるように選べば?
🔵 カイ: \(a = \varphi\), \(b = -\varphi\) とすれば \(e^\varphi \cdot e^{-\varphi} = e^0 = 1\)! 確かに掛けて 1 になりますね。
🟡 リナ: その通り! \(x + y = e^\varphi\), \(x - y = e^{-\varphi}\) と置くと、\((x+y)(x-y) = e^\varphi \cdot e^{-\varphi} = 1\) で \(x^2 - y^2 = 1\) が自動的に満たされる。この連立方程式を \(x, y\) について解くと \(x = (e^\varphi + e^{-\varphi})/2\), \(y = (e^\varphi - e^{-\varphi})/2\) が出てくる。これらに \(\cosh\varphi\), \(\sinh\varphi\) という名前をつけたのが双曲線関数の定義よ。
🔵 カイ: 定義は分かりましたけど、具体的にどんな値になるんですか? \(\cos 0 = 1\), \(\sin 0 = 0\) みたいな感覚が欲しいです。
🟡 リナ: 具体的な値を見てみるわ(\(e \approx 2.718\) は自然対数の底で、\(e^\varphi\) は \(\varphi\) が大きくなると急激に増大し、\(e^0 = 1\), \(e^{-\varphi} = 1/e^\varphi\) という性質を持つ関数ね)。\(\varphi = 0\) なら \(\cosh 0 = (1+1)/2 = 1\), \(\sinh 0 = (1-1)/2 = 0\)。\(\varphi = 1\) なら \(\cosh 1 = (e + e^{-1})/2 \approx (2.72 + 0.37)/2 \approx 1.54\), \(\sinh 1 = (e - e^{-1})/2 \approx (2.72 - 0.37)/2 \approx 1.18\)。\(\varphi\) が大きくなると \(\cosh\varphi\) は \(e^\varphi/2\) のように急激に増大し、\(\sinh\varphi\) も同様に増大する(ただし \(\cosh\) は常に \(\sinh\) より大きい)。
⚪ メイ: \(\varphi = 0\) で \((\cosh, \sinh) = (1, 0)\)——三角関数の \((\cos 0, \sin 0) = (1, 0)\) と同じスタート地点ね。
🟡 リナ: そう。\(x = \cosh\varphi\), \(y = \sinh\varphi\) と置くと、\(x^2 - y^2 = \cosh^2\varphi - \sinh^2\varphi = 1\) が成り立つ——だから「双曲線」関数と呼ばれるの。三角関数で \(x = \cos\theta\), \(y = \sin\theta\) と置くと \(x^2 + y^2 = 1\)(単位円)になったのと同じ発想で、双曲線関数は \(x^2 - y^2 = 1\)(単位双曲線)を描くの。確認してみましょう:
ここで \((a+b)^2 - (a-b)^2 = 4ab\)(高校で習う展開公式)を使うと、\(a = e^\varphi/2\), \(b = e^{-\varphi}/2\) として
(指数法則 \(e^a \cdot e^b = e^{a+b}\) を使った。)\(\varphi\) を変えると点 \((x, y)\) は双曲線 \(x^2 - y^2 = 1\) の上を動いていく。
🔵 カイ: \(e\) の指数関数で定義するんですね。三角関数の \(\cos\theta\) や \(\sin\theta\) と形が似てるけど、何か関係があるんですか? 定義式に \(e^\varphi\) が出てくるのが気になる……。
🟡 リナ: いい勘ね。実は三角関数と双曲線関数には深い数学的なつながりがあるの。ただし、それを理解するには複素数の知識が必要だから、今は立ち入らない。今の段階では「三角関数の親戚で、恒等式の符号が \(+\) から \(-\) に変わったもの」くらいに思っておけば十分よ。
🔵 カイ: 「符号が変わっただけの親戚」か。それなら今は深追いせずに先に進みます。
🟡 リナ: 図 3.9「三角関数と双曲線関数の比較」を見れば、両者の対応関係が一目瞭然。
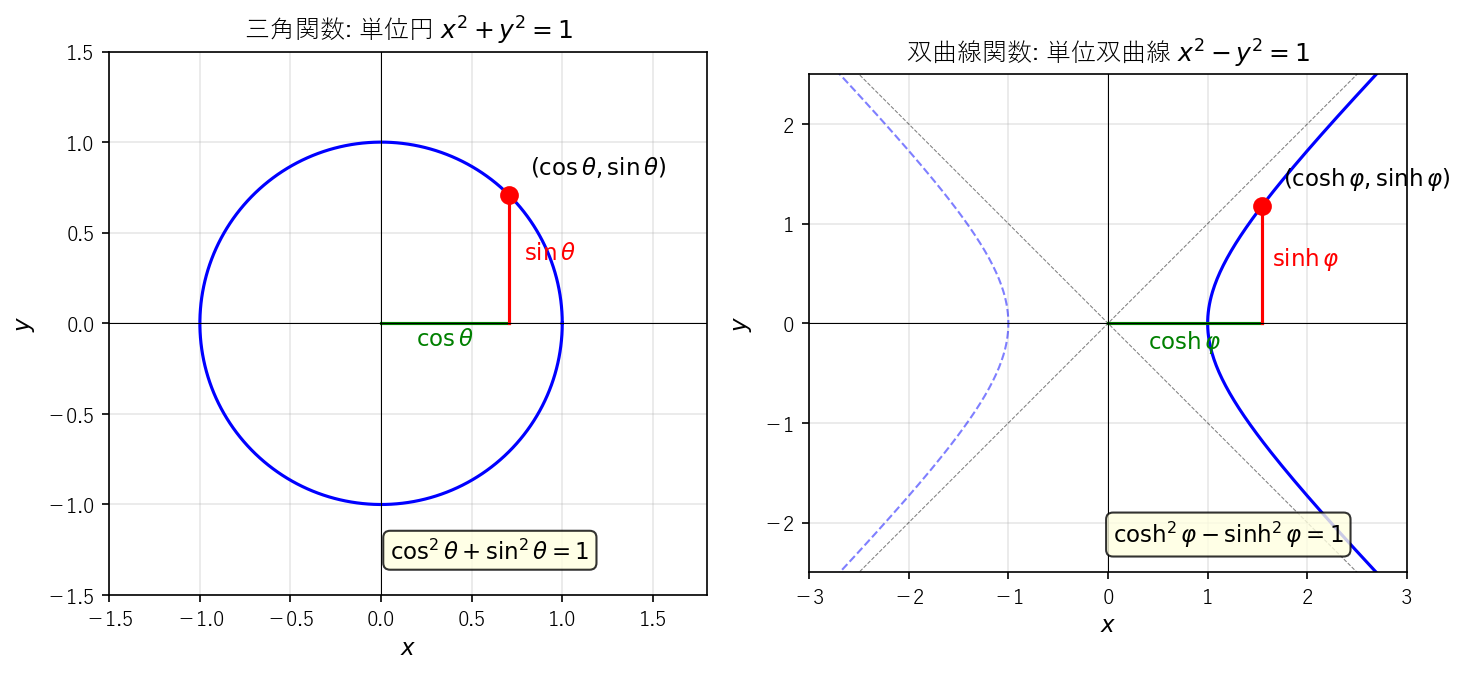
図 3.9: 三角関数と双曲線関数の比較。左: 三角関数 \((\cos\theta, \sin\theta)\) は単位円 \(x^2 + y^2 = 1\) 上を動く。右: 双曲線関数 \((\cosh\varphi, \sinh\varphi)\) は単位双曲線 \(x^2 - y^2 = 1\) 上を動く。恒等式の符号の違い(\(+\) vs \(-\))が、Euclid 幾何と Minkowski 時空の違いに対応する。
🟡 リナ: そして重要な恒等式は
三角関数の \(\cos^2\theta + \sin^2\theta = 1\) のプラスに対して、双曲線関数はマイナス。まさに \(-(ct)^2 + x^2\) の符号パターンに対応している。
🔵 カイ: それで双曲線関数が使えそうだ、というのは分かりました。でも、\(\gamma\) や \(\beta\) を \(\cosh, \sinh\) に置き換える動機がまだピンときません。
🟡 リナ: 鍵は「Lorentz 変換の行列を 1 つのパラメータで書き直したい」ということ。空間回転の行列は、角度 \(\theta\) というたった 1 つのパラメータで決まる(\(\cos\theta, \sin\theta\) は連動して変わる)。同じように、ブーストの行列も 1 つのパラメータで書けるはず。
ブーストの行列成分 \(\gamma\) と \(\gamma\beta\) を眺めると、\(\gamma^2 - (\gamma\beta)^2 = \gamma^2(1 - \beta^2) = \frac{1}{1-\beta^2}\cdot(1-\beta^2) = 1\) という関係がある——これは双曲線恒等式 \(\cosh^2\varphi - \sinh^2\varphi = 1\) と同じ形! だから \(\cosh\varphi = \gamma, \sinh\varphi = \gamma\beta\) と置けば恒等式が自動的に満たされる。この \(\varphi\) を使えば、\(\gamma\) と \(\beta\) を同時に 1 つのパラメータで表せる。
🔵 カイ: おお、\(\gamma^2 - (\gamma\beta)^2 = 1\) がちょうど双曲線恒等式の形になっているんですね!
🟡 リナ: 具体的に確認してみましょう。\(\gamma = 1/\sqrt{1-\beta^2}\) を \(\cosh\varphi\) と対応づけると、恒等式から \(\sinh\varphi = \sqrt{\cosh^2\varphi - 1} = \sqrt{\gamma^2 - 1} = \sqrt{1/(1-\beta^2) - 1} = \beta/\sqrt{1-\beta^2} = \gamma\beta\)。そして三角関数の \(\tan\theta = \sin\theta/\cos\theta\) と同じ発想で、\(\tanh\varphi \equiv \sinh\varphi/\cosh\varphi\)(双曲線正接)を定義すると、\(\tanh\varphi = \gamma\beta/\gamma = \beta\)。なお読み方は、\(\cosh\) は「コッシュ」、\(\sinh\) は「シンチ」、\(\tanh\) は「タンチ」と読むことが多い(「ハイパボリックコサイン」等と読む流儀もある)。\(\tanh\) は \(\varphi = 0\) でゼロ、\(\varphi \to \infty\) で 1 に漸近する関数——つまり \(\beta = v/c\) が 0 から 1 に近づく(光速に漸近するが到達しない)ことと完全に対応しているの。よって、
このパラメータ \(\varphi\) をラピディティ (rapidity) と呼ぶ。すると Lorentz 変換は
空間回転とほぼ同じ形! \(\cos \to \cosh\), \(\sin \to \sinh\) に置き換わり、非対角成分の符号パターンが少し違う(回転は \(+\sin\) と \(-\sin\)、ブーストは両方 \(-\sinh\))けれど、「対角成分が等しく、非対角成分の絶対値が等しい」という構造は共通しているわ。
🔵 カイ: つまりブーストって、時空における「回転」の一種だったんですか?
🟡 リナ: そう。空間の回転が \(x\)-\(y\) 軸を混ぜる変換だったのに対して、ブーストは \(t\)-\(x\) 軸を混ぜる変換。ただし、時間軸と空間軸は不変量の中で符号が逆(\(-(ct)^2 + x^2\))だから、普通の回転(\(\cos, \sin\))ではなく双曲線回転 (hyperbolic rotation) になる。
⚪ メイ: だから「Lorentz 変換は時空の回転」って言われるのね。物理的には慣性系の乗り換えだけど、幾何学的には \(t\)-\(x\) 平面での双曲線回転と同じ。
🔵 カイ: ちなみに、ラピディティ \(\varphi\) はどこまで大きくできるんですか? 角度 \(\theta\) なら \(0\) から \(2\pi\) まで回って元に戻りますけど。
🟡 リナ: ラピディティは \(-\infty < \varphi < \infty\) の範囲を自由に取れるの。\(\tanh\varphi = v/c\) で速度と結びついていて、\(\varphi \to \infty\) で \(v \to c\)(光速に漸近するけど到達しない)。つまり空間回転はパラメータ空間がコンパクト(\([0, 2\pi)\) で周期的・有限範囲)だけど、ブーストは非コンパクト(無限に広がる)。
⚪ メイ: 「ぐるっと一周して元に戻る」回転と「いくら加速しても光速に到達しない」ブーストの違いが、パラメータ空間の形にもそのまま出ているのね。
🟡 リナ: この違いは群論的にも重要で、Lorentz 群の数学的構造に深く関わる話。今は「両者は形は似ているけど、パラメータの取り得る範囲が決定的に違う」ということを覚えておいて。そして空間回転 3 種類(\(x\)-\(y\), \(y\)-\(z\), \(z\)-\(x\))とブースト 3 種類(\(t\)-\(x\), \(t\)-\(y\), \(t\)-\(z\))を合わせた合計 6 種類の変換全体を、広い意味での Lorentz 変換と呼ぶわ。
%%{init: {"theme": "default", "themeCSS": ".edgePath .path, .flowchart-link { stroke-width: 2px !important; }"}}%%
flowchart TB
ds["不変量 ds² = -(cdt)² + dx² + dy² + dz²"]
ds -->|"ds² を保つ変換"| LT["<b>Lorentz 変換</b>(6 種類)"]
LT --> rot["<b>空間回転</b>(3 種類)<br/>x-y, y-z, z-x 軸間の回転<br/>パラメータ: 角度 θ<br/>cos²θ + sin²θ = 1"]
LT --> boost["<b>ブースト</b>(3 種類)<br/>t-x, t-y, t-z 軸間の双曲線回転<br/>パラメータ: ラピディティ φ<br/>cosh²φ - sinh²φ = 1<br/>= 慣性系の乗り換え"]
style ds fill:#fff3cd,stroke:#856404
style LT fill:#d1ecf1,stroke:#0c5460
style rot fill:#d4edda,stroke:#155724
style boost fill:#f8d7da,stroke:#721c24✅ 理解度チェック: Lorentz 変換のブースト部分が、空間回転に似ているが「双曲線回転」と呼ばれるのはなぜでしょうか?
答え
空間回転が不変量 \(x^2 + y^2\) を保ち、三角関数の恒等式 \(\cos^2\theta + \sin^2\theta = 1\) に対応するのに対して、ブーストは不変量 \(-(ct)^2 + x^2\)(マイナス符号を含む)を保ち、双曲線関数の恒等式 \(\cosh^2\varphi - \sinh^2\varphi = 1\) に対応するため。行列の形は同じで、\(\cos \to \cosh\), \(\sin \to \sinh\) に置き換わっているだけ。
図 3.11「不変双曲線とローレンツブースト」を見て。\(-(ct)^2 + x^2 = \text{const}\) の軌跡は双曲線を描く——ブーストは点をこの双曲線に沿って動かす変換なの。ブーストされた座標軸の目盛りは、不変双曲線との交点で較正される。
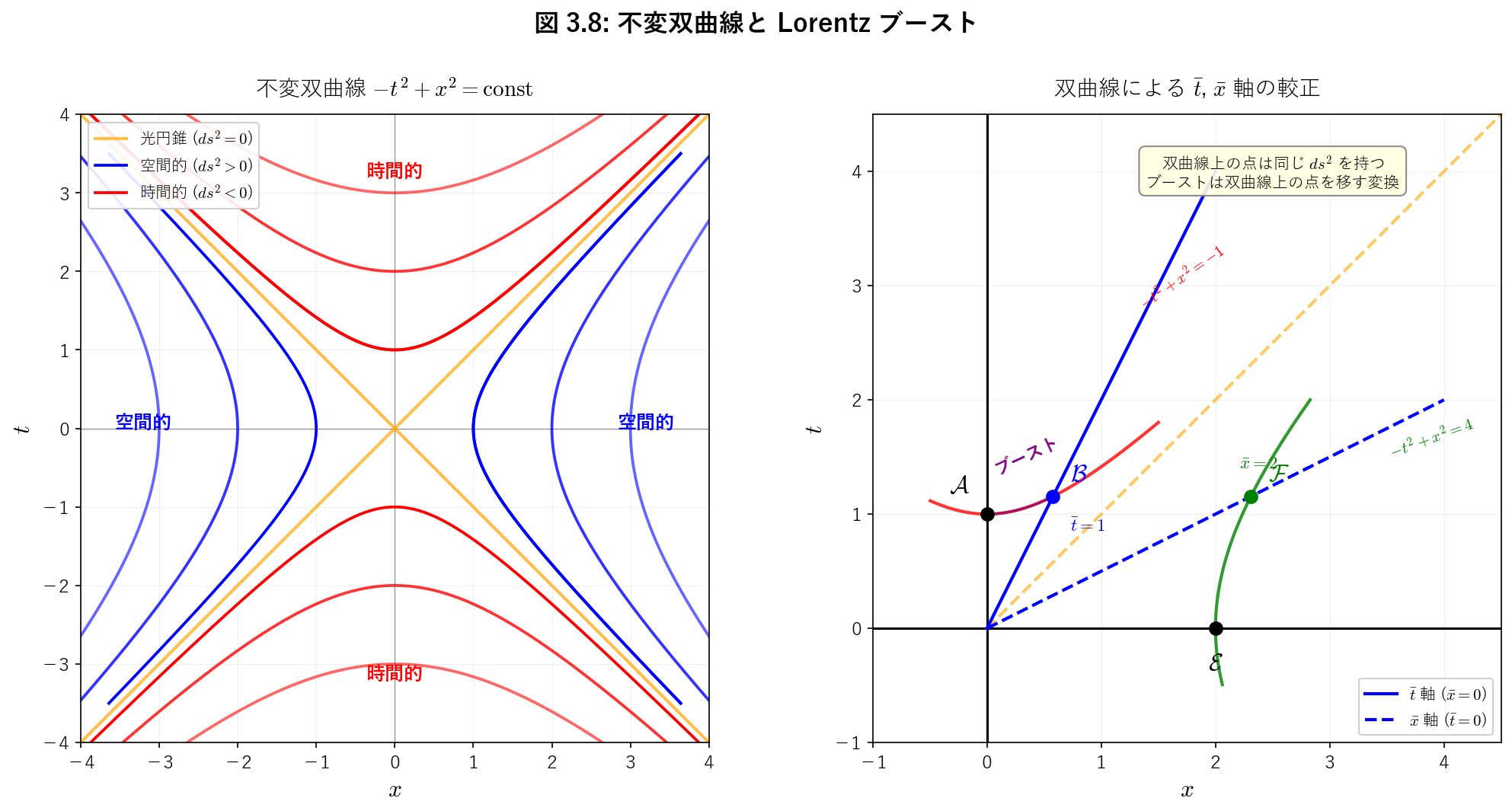
図 3.11: 不変双曲線とローレンツブースト。不変双曲線と Lorentz ブースト。左: 時空間隔 \(-(ct)^2 + x^2 = \mathrm{const}\) の軌跡は双曲線を描く(図の軸は \(c = 1\) 単位で描いている)。時間的(\(ds^2 < 0\)、赤)と空間的(\(ds^2 > 0\)、青)の双曲線が光円錐(橙)で分けられる。右: ブーストされた座標軸 \(\bar{t}, \bar{x}\) の目盛りは、不変双曲線との交点で較正される。事象 \(\mathcal{A}\)(\(S\) 系で \(t=1\))と事象 \(\mathcal{B}\)(\(\bar{S}\) 系で \(\bar{t}=1\))は同じ双曲線上にあり、ブーストで結ばれる。
📝 練習問題:
- 双曲線関数・ラピディティ・Lorentz 変換の導出 → 問題 B-1. 双曲線関数の恒等式の導出, 問題 B-2. ラピディティと Lorentz 因子の関係, 問題 B-3. Lorentz 変換行列の縮約計算, 問題 M-1. Lorentz 変換の係数決定の詳細計算, 問題 M-2. Lorentz 変換による計量の保存条件
3.4 Lorentz 変換の物理的帰結¶
🟡 リナ: これから三つの物理的帰結を導くわ。Lorentz 変換の式から、同時性・時間・長さの概念が慣性系ごとに変わることを見ていく。
この節の単位系について: この章では \(c\) を明示したまま書いている。次の第 4 章で \(c = 1\) の自然単位系を導入するけれど、物理的帰結を見るときは次元の対応が分かりやすいほうが良いので、本章では \(c\) を残しておく。
同時性の相対性¶
🟡 リナ: Lorentz 変換の \(t'\) の式をもう一度見て。
\(S\) 系で同時(\(t_A = t_B\))だが異なる場所(\(x_A \neq x_B\))で起きた二つの事象を考えると、
🔵 カイ: 同時じゃなくなる! 場所が違うと、別の慣性系では時間がずれるんですね。……でも \(-\gamma v(x_A - x_B)/c^2\) って、場所の差 \(x_A - x_B\) が大きいほどずれが大きくなるんですよね。日常的なスケール——例えば 1 km 離れた場所——だと、どのくらいのずれになるんですか?
🟡 リナ: 例えば新幹線(\(v \approx 80\,\mathrm{m/s}\))で \(x_A - x_B = 1\,\mathrm{km}\) なら、\(\gamma v \Delta x / c^2 \approx 80 \times 1000 / (3 \times 10^8)^2 \approx 10^{-12}\,\mathrm{s}\)——1 兆分の 1 秒。日常では検出不可能だけど、GPS 衛星のような精密システムでは無視できない効果よ。これが同時性の相対性 (relativity of simultaneity)。Newton の「絶対的な同時性」は成り立たない。図 3.12「同時性の相対性」を見て——\(S\) 系の同時線と \(S'\) 系の同時線が傾いているのが視覚的に分かるわ。
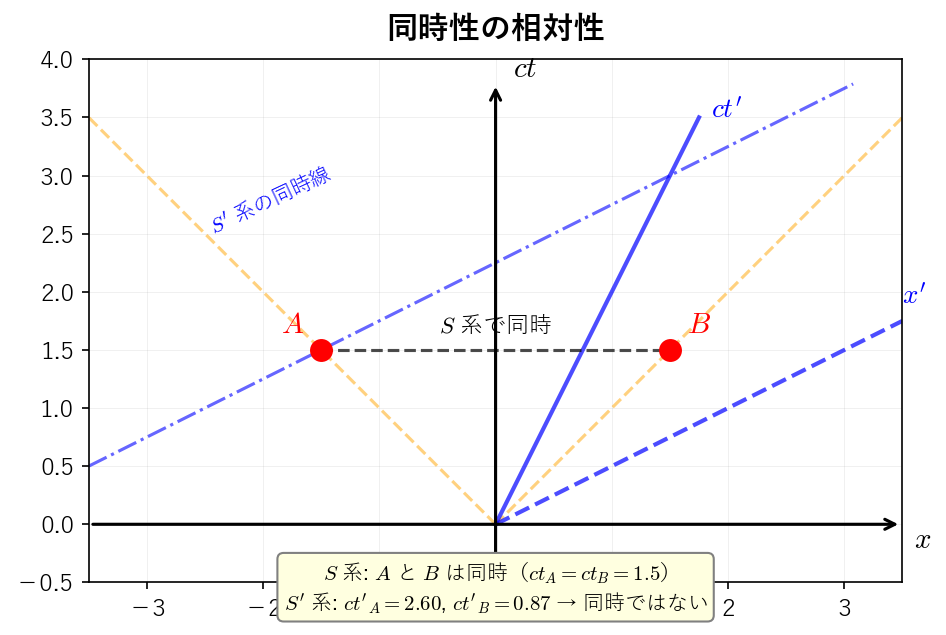
図 3.12: 同時性の相対性。\(S\) 系で同時(黒点線)な二つの事象 A, B は、\(S'\) 系(\(v = 0.5c\))では同時ではない。\(S'\) 系の同時線(青の一点鎖線)が \(S\) 系の同時線に対して傾いているのが原因。
時間の遅れ¶
🟡 リナ: 時間の遅れを直感的に理解するために、「光時計」という思考実験を使うわ(図 3.13「光時計による時間の遅れの導出」)。
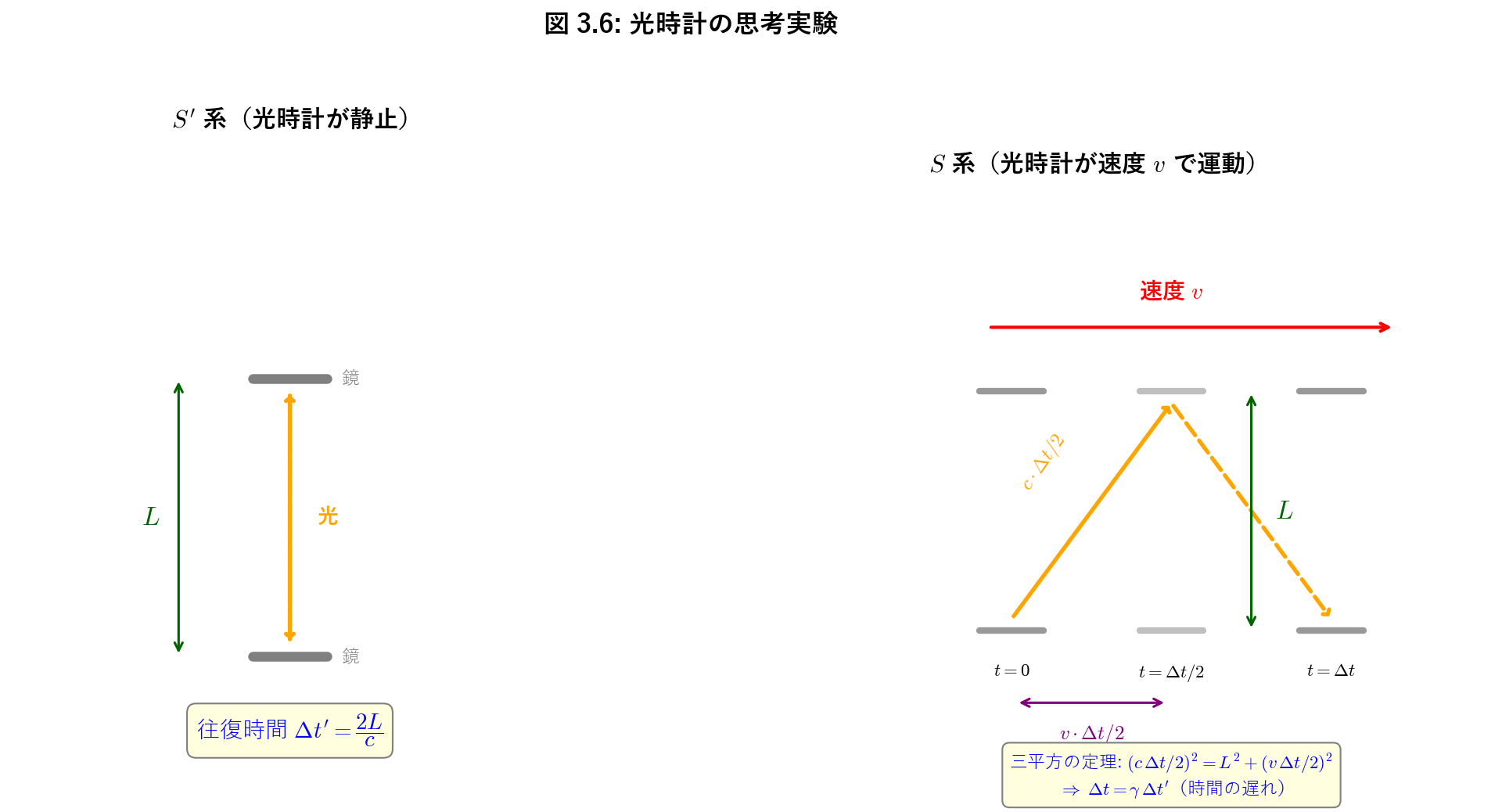
図 3.13: 光時計による時間の遅れの導出。光時計の思考実験。左: \(S'\) 系(光時計が静止)では光が鏡の間を垂直に往復し、往復時間は \(\Delta t' = 2L/c\)。右: \(S\) 系(光時計が速度 \(v\) で運動)では光が斜めの経路を辿り、三平方の定理から \(\Delta t = \gamma\,\Delta t'\) が導かれる。
🟡 リナ: 距離 \(L\) だけ離れた 2 枚の鏡の間を光が往復する「光時計」を考える。\(S'\) 系(光時計が静止)では光は垂直に往復するから、1 往復の時間は \(\Delta t' = 2L/c\)。\(S\) 系(光時計が速度 \(v\) で横に動いている)では光が斜めに進むから経路が長くなる。片道で光が進む距離を \(d\) とすると、光は垂直方向に \(L\)、水平方向に \(v \cdot (\Delta t/2)\) 進むから、三平方の定理より \(d = \sqrt{L^2 + (v\Delta t/2)^2}\)。光速は \(c\) だから \(d = c\Delta t/2\)。これを代入して \((c\Delta t/2)^2 = L^2 + (v\Delta t/2)^2\)、整理すると \(\Delta t = 2L/(c\sqrt{1-v^2/c^2}) = \gamma\,\Delta t'\) に伸びる——これが時間の遅れの直感的な理解。
🔵 カイ: 三平方の定理だけで導けるんですね。光が斜めに進む分だけ時間がかかる——シンプルだけど深い。
🟡 リナ: ここでは同じ結果を Lorentz 変換から直接導出するわ。\(S'\) 系で同じ場所(\(\Delta x' = 0\))で起きた二つの事象の時間間隔を \(\Delta t'\) とする。Lorentz 変換の逆変換——\(S'\) から \(S\) への変換——は、順変換で \(v \to -v\) と置き換えるだけで得られる。理由はこう:相対性原理により、Lorentz 変換の式の形はどの慣性系を基準にしても同じ。\(S\) を基準にすると「\(S'\) は速度 \(+v\) で動いている」から順変換が得られた。今度は \(S'\) を基準にすると「\(S\) は速度 \(-v\) で動いている」——\(S'\) から見れば \(S\) は逆方向に遠ざかっていくから、速度の符号が反転するのよ。同じ形の式で速度だけ \(-v\) に変わるから、逆変換は \(v \to -v\) の置き換えで得られるの。ここで \(\gamma = 1/\sqrt{1 - v^2/c^2}\) は \(v^2\) にしか依存しないから、\(v \to -v\) としても \(\gamma\) の値は変わらない——変わるのは \(\beta = v/c\) の符号だけよ。具体的に書くと、順変換 \(ct' = \gamma(ct - \beta x)\), \(x' = \gamma(x - \beta\,ct)\) で \(v \to -v\)(つまり \(\beta \to -\beta\))とすれば
つまり \(t = \gamma(t' + vx'/c^2)\), \(x = \gamma(x' + vt')\)。
(検算——読み飛ばしても OK:逆変換 \(t = \gamma(t' + vx'/c^2)\), \(x = \gamma(x' + vt')\) を順変換 \(ct' = \gamma(ct - \beta x)\) に代入して \(ct'\) が戻ることを確認する。\(ct = c\gamma(t' + vx'/c^2) = \gamma(ct' + vx'/c)\)、\(\beta x = (v/c)\gamma(x' + vt') = \gamma(vx'/c + v^2t'/c)\)。よって \(\gamma(ct - \beta x) = \gamma\bigl[\gamma(ct' + vx'/c) - \gamma(vx'/c + v^2t'/c)\bigr] = \gamma^2\bigl(ct' - v^2t'/c\bigr) = \gamma^2 \cdot ct'(1 - v^2/c^2) = ct'\)。最後のステップで \(\gamma^2(1 - v^2/c^2) = 1\) を使った——これは \(\gamma = 1/\sqrt{1-v^2/c^2}\) の定義から直接出る。)\(\Delta x' = 0\) のとき、
\(\gamma > 1\) だから、\(\Delta t > \Delta t'\)。これを時空図で表すと図 3.14「時間の遅れの時空図表現」のようになるわ。
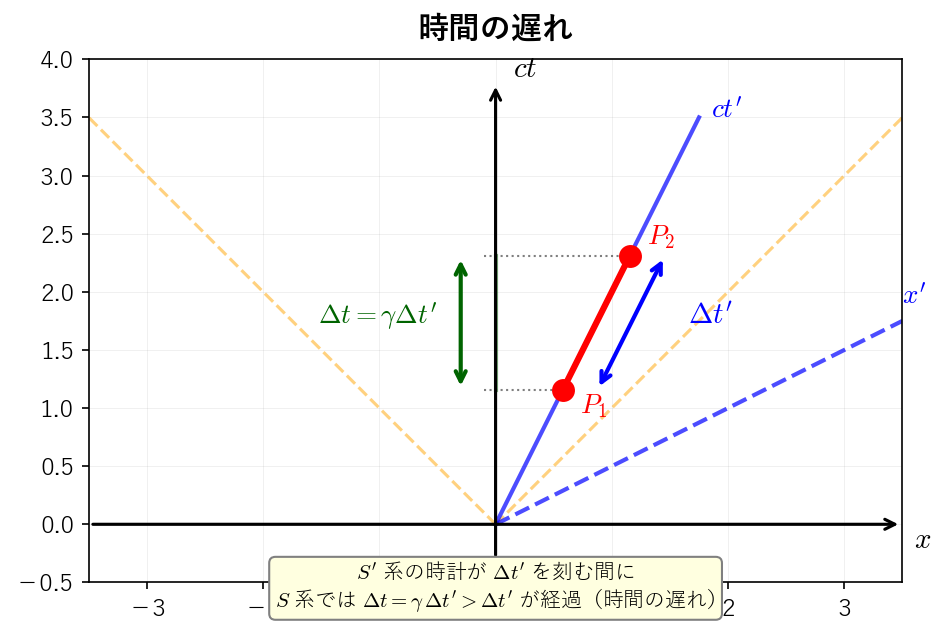
図 3.14: 時間の遅れの時空図表現。\(S'\) 系で静止した時計が刻む間隔 \(\Delta t'\) は、\(S\) 系から見ると \(\Delta t = \gamma\,\Delta t'\) に引き伸ばされる。\(ct'\) 軸に沿った間隔が \(ct\) 軸に射影されると長くなる。
\(\gamma > 1\) だから、\(\Delta t > \Delta t'\)。
🔵 カイ: 動いている時計はゆっくり進む! \(v = 0.9c\) だと \(\gamma \approx 2.3\) だから、時間が 2 倍以上遅れる……。でも待ってください、\(S\) 系から見れば \(S'\) の時計が遅れるけど、\(S'\) 系から見れば \(S\) の時計が動いているわけで、\(S'\) から見ても \(S\) の時計が遅れるんですか? お互いに「相手が遅い」って矛盾しませんか?
🟡 リナ: 「お互いに遅い」の疑問はとても重要——これは双子のパラドックスとして有名な問題で、このすぐ後の Dive Deep で詳しく扱うわ。結論だけ先に言うと、矛盾はしない。「お互いに相手が遅い」は、二人がずっと等速直線運動を続ける限り対称的で、どちらが「本当に遅い」かを決める実験はできない。矛盾が生じるように見えるのは、片方が加速して戻ってきたとき——そのとき対称性が破れて、加速した側が確定的に若くなるの。
実験的な裏付けについては、宇宙線で生成される muon (ミューオン) で確認されている。静止寿命は約 \(2.2\,\mu\mathrm{s}\) だけど、光速に近い速度で飛ぶ muon は地上の観測者から見て寿命が延び、大気を通過して地表まで到達できるの。
🔵 カイ: \(2.2\,\mu\mathrm{s}\) って、光速でも \(c \times 2.2 \times 10^{-6} \approx 660\,\mathrm{m}\) しか進めないですよね? 大気の厚さは何十 km もあるのに地表まで届くってことは、\(\gamma\) が相当大きくないと説明がつかない……実際どのくらいなんですか?
🟡 リナ: 典型的な宇宙線 muon はエネルギーが高くて \(v \approx 0.998c\) 程度で飛んでくる。このとき \(\gamma \approx 15\) で、地上の時計で見た寿命は \(15 \times 2.2\,\mu\mathrm{s} \approx 33\,\mu\mathrm{s}\)。その間に \(0.998c \times 33\,\mu\mathrm{s} \approx 10\,\mathrm{km}\) 進める——大気上層から地表まで届くのに十分ね。
⚪ メイ: 静止していたら \(660\,\mathrm{m}\) しか進めないのに、時間の遅れのおかげで \(10\,\mathrm{km}\) 以上進める——時間の遅れの直接的な証拠ね。
🔍 Dive Deep:双子のパラドックス——なぜ矛盾しないのか?
🔵 カイ: ちょっと待ってください。「動いている時計は遅れる」って言いますけど、\(S\) 系から見れば \(S'\) が動いていて、\(S'\) 系から見れば \(S\) が動いている。お互いに「相手の時計が遅れている」と主張するなら、矛盾しませんか? 双子の兄弟で、一方がロケットで旅して戻ってきたら、どっちが若いんですか?
🟡 リナ: これが有名な双子のパラドックス (twin paradox) ね。結論から言うと、ロケットで旅した方が若い。矛盾はない。
ポイントは対称性が破れていること。地球に残った兄はずっと慣性系にいる(等速直線運動、つまり加速度ゼロ)。一方、ロケットで旅した弟は、出発時に加速し、折り返し点で減速・反転し、帰還時に減速する——つまり加速を経験する。この加速が二人の状況を非対称にしているの。
特殊相対論の「動いている時計は遅れる」は、慣性系の間の比較にしか使えない。弟のロケットは折り返し点で慣性系を乗り換えるから、単純に「弟から見れば兄が動いている」とは言えない。
定量的には、固有時 \(\tau\)(物体自身の時計が刻む時間)で考える。時間の遅れの式 \(\Delta t' = \Delta t/\gamma = \Delta t\sqrt{1 - v^2/c^2}\) を、速度が変化する場合に微小区間ごとに適用して足し合わせると \(\tau = \int \sqrt{1 - v^2/c^2}\,dt\) となる(固有時の正式な定義は第 4 章で行う)。各自の世界線に沿ってこの積分を計算すれば答えが出る。慣性系にいる兄は \(\tau_{\text{兄}} = \Delta t\)(座標時間そのまま)。加速・減速する弟は \(v > 0\) の区間があるから \(\sqrt{1 - v^2/c^2} < 1\) で、\(\tau_{\text{弟}} < \Delta t = \tau_{\text{兄}}\)。弟の方が固有時が短い=若い。
🔵 カイ: 時空図で見ると、兄の世界線はまっすぐで弟は折れ線……普通の幾何なら寄り道するほど経路が長くなりますよね。でもここでは弟の方が固有時が短い——逆になってませんか?
🟡 リナ: いい着眼点ね。その通りで、Minkowski 時空では直線の世界線が固有時を最大にするの——Euclid 幾何と逆の性質を持つのよ。これは第 8 章で「測地線」として定式化する話につながるわ。根本的な理由は時空間隔のマイナス符号にある。
長さの収縮¶
🟡 リナ: 次は長さの収縮ね。図 3.15「長さの収縮の時空図表現」を見ながら考えましょう。
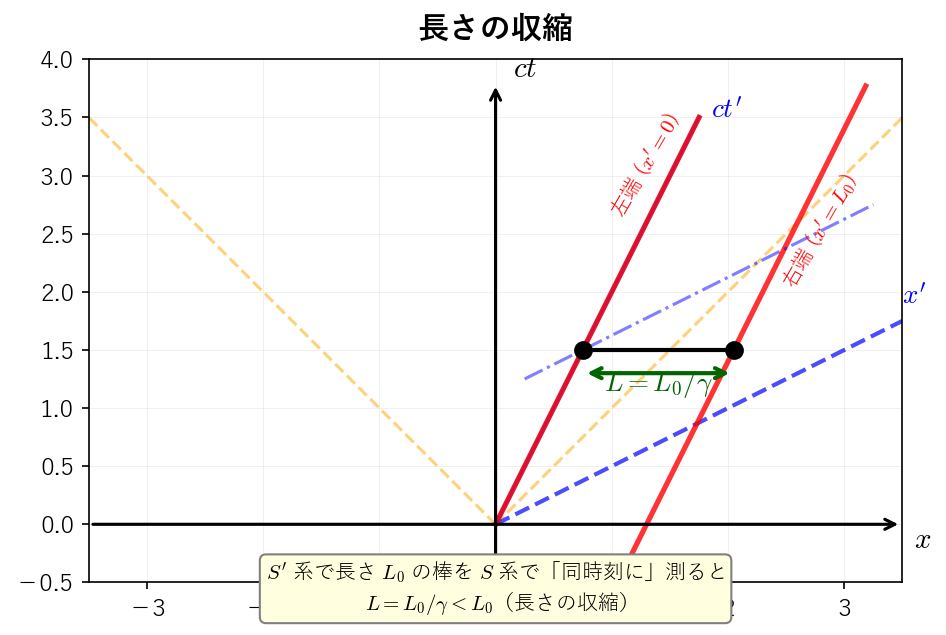
図 3.15: 長さの収縮の時空図表現。\(S'\) 系で静止した棒(赤の 2 本の世界線)を \(S\) 系で「同時刻に」測ると、固有長 \(L_0\) より短い \(L = L_0/\gamma\) になる。\(S\) 系の同時線(水平)と \(S'\) 系の同時線(傾いた青の一点鎖線)が異なるのが原因。
🟡 リナ: \(S'\) 系で静止している棒の長さが \(L_0\)(固有長)だとする。\(S\) 系で同時刻に(\(\Delta t = 0\))両端の座標を測ると、Lorentz 変換 \(x' = \gamma(x - vt)\) の差分をとって
ここで \(\Delta x' = L_0\) と置ける理由を確認しておくわ。棒は \(S'\) 系で静止しているから、両端の \(x'\) 座標は時間によらず一定——例えば左端が \(x' = 0\)、右端が \(x' = L_0\) にずっと居座っている。\(S\) 系で同時刻(\(\Delta t = 0\))に両端を測定し、その結果を Lorentz 変換で \(S'\) の座標に変換すると、\(S'\) 系では二つの測定事象が同時刻とは限らない。でも棒が静止しているから、どの時刻に見ても右端は \(x' = L_0\)、左端は \(x' = 0\)。つまり \(S'\) 系での「右端の \(x'\) 座標」と「左端の \(x'\) 座標」は、それぞれの測定がいつ行われたかに関係なく同じ値を返す。だから \(S'\) 系で同時刻でなくても \(\Delta x' = L_0\) が成り立つの(具体例:\(S'\) 系で右端の測定事象が \(t' = 3\) に、左端が \(t' = 5\) に対応していても、棒は動いていないから差は \(L_0 - 0 = L_0\) のまま)。よって \(\Delta x' = L_0\)、\(\Delta x = L\) とすれば
🔵 カイ: 動いている物体は運動方向に縮んで見える……でもこれって、本当に物理的に縮んでるんですか? それとも「見かけ上そう見える」だけ?
🟡 リナ: 「同時刻に両端の位置を測る」という操作の結果が \(L = L_0/\gamma\) になる——これは測定結果として実在する効果よ。ただし、棒の内部に力がかかって物質的に圧縮されているわけではない。「同時刻に測る」の意味が慣性系ごとに異なるから、同じ棒でも切り取る断面が変わって長さが違って見える——時空の切り方の違いが長さの違いとして現れるの。
⚪ メイ: ここで「同時刻に測る」という条件が本質的なのよね。さっきの同時性の相対性を思い出すと、\(S\) 系で同時刻の測定は \(S'\) 系では同時刻ではない——だからこそ長さが変わるということね。
🔵 カイ: 直感に反しますけど、全部 Lorentz 変換から出てくるんですね。……でも一つ気になるのは、時間の遅れと長さの収縮って、\(\gamma\) が分子に来るか分母に来るかの違いだけですよね。なぜ時間は「伸びる」のに長さは「縮む」んですか? 逆にならない理由は?
🟡 リナ: いい疑問ね。鍵は「何を固定しているか」の違い。時間の遅れでは \(\Delta x' = 0\)(同じ場所)を固定して時間を比べる——\(S'\) 系で場所を固定して、\(S\) 系の時間が \(\gamma\) 倍に伸びる。長さの収縮では \(\Delta t = 0\)(同時刻)を固定して位置を比べる——\(S\) 系で時刻を固定して、\(S'\) 系の長さが \(1/\gamma\) 倍に縮む。どちらの系で何を固定するかが逆だから、\(\gamma\) が掛かる側が逆になるの。
⚪ メイ: つまり、固定する系と比べる系が入れ替わるから、\(\gamma\) が分子に来るか分母に来るかが変わるのね。
🔵 カイ: ああ、そうか。「何を固定するか」が違うから結果の向きが逆になるんですね。同じ Lorentz 変換なのに、切り口を変えると伸びたり縮んだりする——一つの変換の別の顔を見ているだけなんだ。
🔵 カイ: ということは、\(\Delta t' \neq 0\) かつ \(\Delta x' \neq 0\) のように何も固定しない一般の場合は、時間の遅れと長さの収縮が混ざり合うんですか?
🟡 リナ: いい質問。その通りで、一般の場合は Lorentz 変換の式をそのまま使うしかない。時間の遅れや長さの収縮は、特定の条件を固定したときの「切り口」にすぎないの。同時性の相対性、時間の遅れ、長さの収縮——これらは別々の現象ではなく、Lorentz 変換という一つの変換則の異なる側面にすぎない。
🔵 カイ: なるほど……一つの変換から、条件の切り方で色々な顔が見えるんですね。逆に言えば、Lorentz 変換さえ押さえておけば全部出てくる。でも、加速している場合はどうなるんだろう——慣性系じゃなくなったら、この変換自体が使えなくなりますよね。
🟡 リナ: その通り。加速系を扱うには、慣性系の間の変換だけでは足りなくて、「任意の座標変換」に対応できる枠組みが必要になる——それがまさに一般相対論の舞台よ。第 5 章以降で本格的に取り組むわ。今はまず、慣性系の間で何が起きるかを整理しておきましょう。
🔵 カイ: 特殊相対論は「慣性系限定」の理論で、その先に一般相対論がある——全体の中での位置づけが見えてきました。
🟡 リナ: そう。では今の段階で、Lorentz 変換から出てくる三つの帰結を整理しておくわ。
表 3.5: Lorentz 変換の三つの物理的帰結の比較
| 帰結 | 固定する条件 | 結果 | 数式 |
|---|---|---|---|
| 同時性の相対性 | \(t_A = t_B\)(\(S\) 系で同時) | \(S'\) 系では同時ではない | \(t'_A - t'_B = -\gamma v(x_A - x_B)/c^2\) |
| 時間の遅れ | \(\Delta x' = 0\)(\(S'\) 系で同じ場所) | \(S\) 系で時間が伸びる | \(\Delta t = \gamma\,\Delta t'\) |
| 長さの収縮 | \(\Delta t = 0\)(\(S\) 系で同時刻に測定) | 運動方向に縮む | \(L = L_0/\gamma\) |
✅ 理解度チェック: 時間の遅れ (time dilation) を一言で説明してみましょう。
答え
動いている時計は静止している時計より遅く進む。\(S'\) 系で同じ場所で測った時間間隔 \(\Delta t'\) は、\(S\) 系から見ると \(\Delta t = \gamma \Delta t'\)(\(\gamma > 1\))に引き伸ばされる。
📝 練習問題:
- 同時性の相対性・時間の遅れ・速度の合成 → 問題 M-3. 同時性の相対性の定量的帰結, 問題 M-4. 固有時間と座標時間の関係, 問題 M-5. 速度の合成則の導出, 問題 M-6. 同時性の相対性(具体例)
まとめ¶
この章では、特殊相対論の出発点から Lorentz 変換、そしてその物理的帰結までを一気に辿った。要点を整理すると:
- 二つの公理 — 相対性原理(物理法則はすべての慣性系で同じ形)と光速不変の原理(光速 \(c\) は観測者によらず一定)。この二つだけから以下が全て導かれる。
- 時空間隔 \(ds^2\) — 光速不変から \(ds^2 = -(cdt)^2 + dx^2 + dy^2 + dz^2\) がすべての慣性系で不変となる 0 階テンソル(スカラー不変量)として決まった。時間の項にマイナス符号がつくのが Euclid 幾何との決定的な違い。
- Lorentz 変換 — \(ds^2\) を保つ座標変換。Galilei 変換の「光速を考慮した修正版」で、\(v \ll c\) の極限で Galilei 変換に戻る。幾何学的には \(t\)-\(x\) 平面での双曲線回転であり、空間回転と同じ構造を持つ(\(\cos \to \cosh\), \(\sin \to \sinh\))。
- 物理的帰結 — 同時性の相対性、時間の遅れ \(\Delta t = \gamma \Delta t'\)、長さの収縮 \(L = L_0/\gamma\)。どれも光速不変を受け入れれば必然的に出てくる。Newton の「絶対時間・絶対空間」は成り立たない。
次章予告¶
第 4 章では、本章で得た物理的内容を、一般相対論に進むための数学の言葉で書き直す。自然単位系(\(c = 1\))と添字記法、Einstein の縮約規則、Minkowski 計量 \(\eta_{\mu\nu}\)、4 元ベクトル、共変ベクトル、そしてテンソルの初歩までを整備する。ここで揃えた道具は、第 5 章以降で「曲がった時空」を扱うときにそのまま活躍することになる。
参考文献¶
- Hartle, J. B. Gravity: An Introduction to Einstein's General Relativity, Chapters 4–5. Addison-Wesley, 2003.
- Schutz, B. F. A First Course in General Relativity, 3rd ed., Chapter 1. Cambridge University Press, 2022.
- Tong, D. General Relativity, Chapter 1. University of Cambridge lecture notes, 2019.
- Landau, L. D. and Lifshitz, E. M. The Classical Theory of Fields, 4th ed., §1–4. Butterworth-Heinemann, 1975.(ランダウ・リフシッツ『場の古典論』東京図書)
- 砂川重信『理論電磁気学』第 12 章. 紀伊國屋書店, 1999.
- 佐藤勝彦『相対性理論』岩波基礎物理シリーズ, 第 1–4 章. 岩波書店, 1996.
- 石井俊全『一般相対性理論を一歩一歩数式で理解する』第 8–9 章. ベレ出版, 2013.
- Lancaster, T. and Blundell, S. J. General Relativity for the Gifted Amateur, Chapter 1. Oxford University Press, 2014.
このページについてフィードバック
分からなかった箇所、誤りの指摘、改善提案などをお寄せください。