第 5 章 練習問題 解答¶
目次
Basic(基礎)
- B-1. Poisson 方程式と波動方程式の比較
- B-2. 慣性質量と重力質量による落下加速度
- B-3. Eötvös パラメータの線形近似
- B-4. 自由落下座標への変換における速度と加速度
- B-5. \(m_I \neq m_G\) の場合の自由落下座標変換
- B-6. 光の移動時間と地面装置の獲得速度
- B-7. Doppler 効果から見た光の振動数
- B-8. ポテンシャル形式の重力赤方偏移公式
Medium(標準)
- M-1. 異なる物質の自由落下エレベーター実験
- M-2. 多粒子系での等価原理
- M-3. 潮汐力と等価原理の局所性
- M-4. 等価原理からの重力赤方偏移の導出
- M-5. 東京スカイツリーでの時計のずれ
- M-6. Newton 力学と一般相対論の解釈の転換
Advanced(発展)
Basic(基礎)¶
B-1. Poisson 方程式と波動方程式の比較¶
→ 問題に戻る
問題:
Newton の Poisson (ポアソン) 方程式
を 3 次元直交座標 \((x, y, z)\) で展開し、\(\nabla^2 \Phi\) を \(\Phi\) の偏微分で書き下せ。さらに、電磁ポテンシャル (electromagnetic potential) が満たす波動方程式
と比較して、Poisson 方程式に欠けている項を指摘し、その物理的意味を述べよ。
解法の方針: Poisson 方程式を直交座標で展開し、電磁ポテンシャルの波動方程式と比較する。
Poisson 方程式の展開:
波動方程式との比較:
電磁ポテンシャルの波動方程式は、
すなわち、
Poisson 方程式に欠けているのは時間の 2 階微分の項 \(\displaystyle -\frac{1}{c^2}\frac{\partial^2 \Phi}{\partial t^2}\) である。
物理的意味:
波動方程式における時間微分の項は、場の変化が有限の速度 \(c\) で伝播することを保証する。この項があることで、ソース \(\rho_e\) の変化は光速 \(c\) で波として伝わる。
一方、Poisson 方程式には時間微分がないため、ソース \(\rho\) が変化すると重力ポテンシャル \(\Phi\) は空間全体で瞬時に変化しなければならない。これは瞬間的な遠隔作用を意味し、特殊相対論の「情報は光速を超えて伝わらない」という原理と矛盾する。
B-2. 慣性質量と重力質量による落下加速度¶
→ 問題に戻る
問題:
質量 \(m\) の物体が一様な重力場 \(\mathbf{g}\) の中にある。慣性質量 (inertial mass) を \(m_I\)、重力質量 (gravitational mass) を \(m_G\) として、この物体の落下加速度 \(a\) を \(m_I\)、\(m_G\)、\(g\) で表せ。
解法の方針: 運動方程式 \(m_I a = m_G g\) を \(a\) について解く。
検算: \(m_I = m_G\) のとき \(a = g\) となり、ガリレオの自由落下の法則と整合する。次元も \([a] = \text{m/s}^2\) で正しい。
B-3. Eötvös パラメータの線形近似¶
→ 問題に戻る
問題:
物質 A の慣性質量を \(m_{A,I}\)、重力質量を \(m_{A,G}\)、物質 B の慣性質量を \(m_{B,I}\)、重力質量を \(m_{B,G}\) とする。Eötvös (エトヴェシュ) パラメータ (Eötvös parameter)
について、\(m_{A,G}/m_{A,I} = 1 + \epsilon_A\)、\(m_{B,G}/m_{B,I} = 1 + \epsilon_B\)(\(|\epsilon_A|, |\epsilon_B| \ll 1\))とおいて、\(\eta\) を \(\epsilon_A\) と \(\epsilon_B\) の 1 次まで近似せよ。
解法の方針: \(m_{A,G}/m_{A,I} = 1 + \epsilon_A\)、\(m_{B,G}/m_{B,I} = 1 + \epsilon_B\) を Eötvös パラメータに代入し、\(\epsilon\) の 1 次まで近似する。
計算:
分子:
分母:
\(|\epsilon_A|, |\epsilon_B| \ll 1\) なので、分母 \(\approx 1\)。
よって、
検算: \(\epsilon_A = \epsilon_B\) のとき \(\eta = 0\) となり、2 つの物質の \(m_G/m_I\) が等しければ Eötvös パラメータがゼロになるのは物理的に正しい。
B-4. 自由落下座標への変換における速度と加速度¶
→ 問題に戻る
問題:
一様重力場 \(\mathbf{g}\) 中の粒子の位置 \(\bar{x}(t)\) に対し、自由落下座標への変換
を施す。速度 \(\dot{\bar{x}}' \equiv d\bar{x}'/dt'\) を \(\dot{\bar{x}}\) と \(\mathbf{g}\)、\(t\) を用いて表せ。さらに加速度 \(\ddot{\bar{x}}'\) を \(\ddot{\bar{x}}\) と \(\mathbf{g}\) で表せ。
解法の方針: \(t' = t\) なので \(d/dt' = d/dt\)。座標変換 \(\bar{x}' = \bar{x} - \frac{1}{2}\mathbf{g}\,t^2\) を時間で微分する。
速度:
加速度:
検算: 自由落下する粒子(\(\ddot{\bar{x}} = \mathbf{g}\))に対して \(\ddot{\bar{x}}' = \mathbf{g} - \mathbf{g} = 0\) となり、自由落下座標では加速度がゼロになる。等価原理と整合。
B-5. \(m_I \neq m_G\) の場合の自由落下座標変換¶
→ 問題に戻る
問題:
参考図: 図 4.1: 等価原理の思考実験
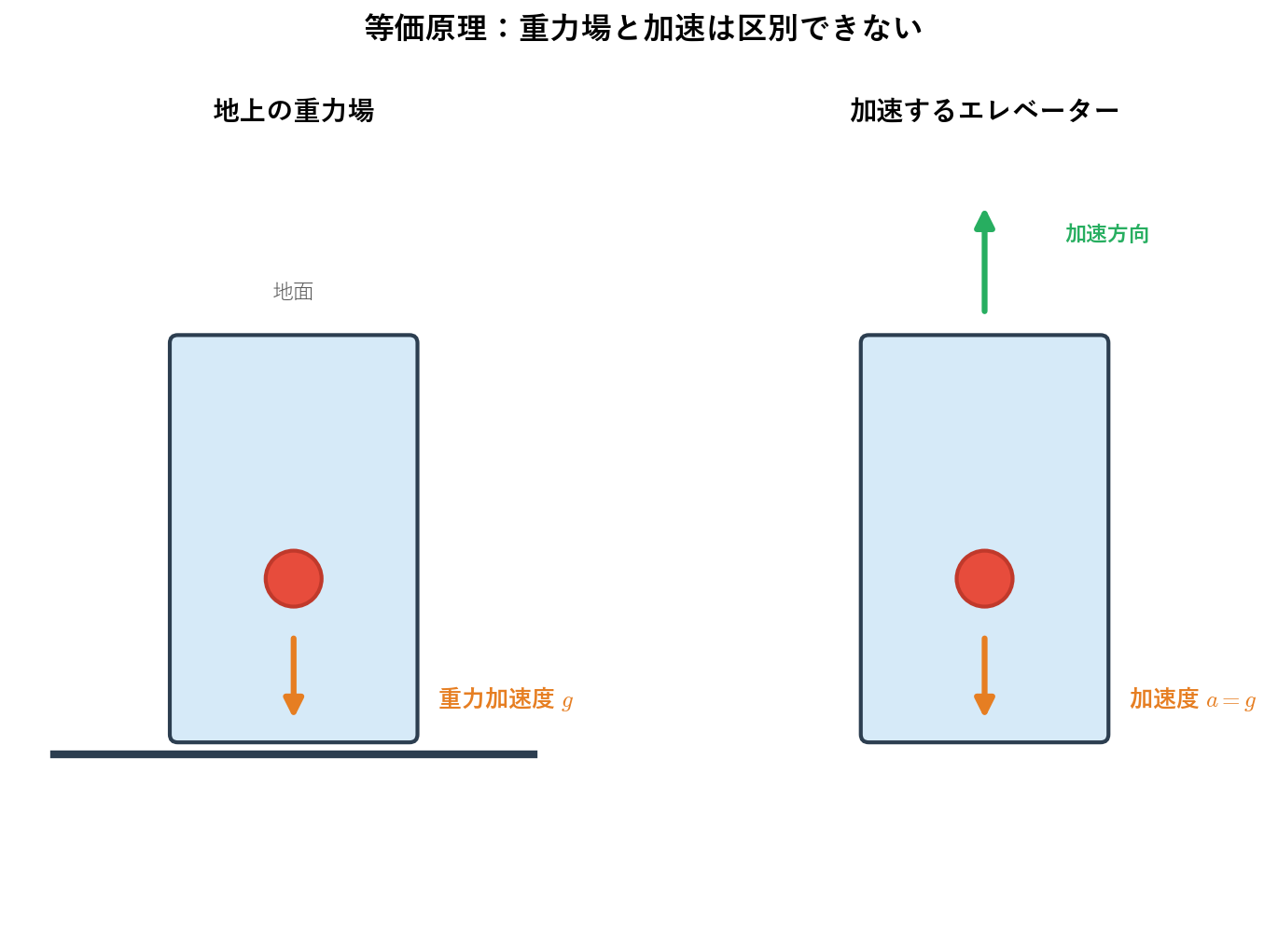{kind=link}
自由落下座標系で重力が消えることを示す計算において、運動方程式
に対し、\(m_I \neq m_G\) の場合に座標変換 \(\bar{x}' = \bar{x} - \frac{1}{2}\mathbf{g}\,t^2\) を施すと、変換後の運動方程式がどうなるか求めよ。重力項が完全には消えないことを示せ。
解法の方針: \(m_I \neq m_G\) の場合に座標変換を施し、重力項が残ることを示す。
元の運動方程式:
問題 B-4. 自由落下座標への変換における速度と加速度 の結果 \(\ddot{\bar{x}} = \ddot{\bar{x}}' + \mathbf{g}\) を代入すると、
展開して整理すると、
\(m_I \neq m_G\) のとき、\(\left(\dfrac{m_G}{m_I} - 1\right)\mathbf{g} \neq 0\) であり、重力項が完全には消えない。
さらに、\(m_G/m_I\) の値が粒子の種類によって異なる場合、残留する重力加速度 \(\left(\frac{m_G}{m_I} - 1\right)\mathbf{g}\) は粒子ごとに異なるため、単一の座標変換ですべての粒子の重力を同時に消すことは不可能である。
検算: \(m_G = m_I\) のとき、\(\ddot{\bar{x}}' = \bar{F}_{\text{ext}}/m_I\) となり、重力項が完全に消える。これは本文の結果と一致する。
B-6. 光の移動時間と地面装置の獲得速度¶
→ 問題に戻る
問題:
塔の頂上(高さ \(h\))から地面に向かって光を発射する。自由落下する観測者から見たとき、光が地面に到達するまでの時間 \(\Delta t\) を \(h\) と \(c\) で近似的に表せ。さらに、その間に地面の装置が自由落下系に対して獲得する速度 \(v\) を \(g\)、\(h\)、\(c\) で表せ。
解法の方針: 光の移動時間を求め、その間に地面の装置が自由落下系に対して獲得する速度を計算する。
光の移動時間:
光は速度 \(c\) で高さ \(h\) を移動するので、
地面の装置が獲得する速度:
自由落下系から見ると、地面の装置は加速度 \(g\) で上向きに加速している。時間 \(\Delta t\) の間に獲得する速度は、
検算: 次元を確認する。\([g \cdot h / c] = (\text{m/s}^2)(\text{m})/(\text{m/s}) = \text{m/s}\)。速度の次元で正しい。また、\(h = 0\) のとき \(v = 0\) となるのも妥当。
B-7. Doppler 効果から見た光の振動数¶
→ 問題に戻る
問題:
特殊相対論 (special relativity) の Doppler (ドップラー) 効果の非相対論的近似として、光源に向かって速度 \(v\)(\(v \ll c\))で近づく観測者が受け取る振動数 \(\nu\) は
で与えられる(\(\nu'\) は光源の振動数)。問題 B-6. 光の移動時間と地面装置の獲得速度 の結果を代入して、地面で受け取る光の振動数 \(\nu\) を \(\nu'\)、\(g\)、\(h\)、\(c\) で表せ。
解法の方針: Doppler 効果の非相対論的近似に 問題 B-6. 光の移動時間と地面装置の獲得速度 の結果を代入する。
地面の装置は光源(塔の頂上)に向かって速度 \(v = gh/c\) で近づいているので、
検算: \(h = 0\) のとき \(\nu = \nu'\) で振動数変化なし。\(h > 0\) のとき \(\nu > \nu'\) で、頂上から地面に向かう光は青方偏移する。これは重力ポテンシャルの低い場所に光が落ちてくるとエネルギーが増える(振動数が上がる)ことと整合する。
B-8. ポテンシャル形式の重力赤方偏移公式¶
→ 問題に戻る
問題:
重力赤方偏移 (gravitational redshift) の公式
は地面から頂上に光を送った場合の振動数変化を表す。一般の重力ポテンシャル (gravitational potential) \(\Phi\) を用いると、ポテンシャル差 \(\Delta\Phi\) の場所間で
と書ける。一様重力場で \(\Phi = gh\)(地面を基準)として、上の 2 つの式が整合することを確認せよ。
解法の方針: 一様重力場で \(\Phi = gh\)(地面を基準)として、2 つの公式が一致することを確認する。
地面から頂上に光を送る場合を考える。地面の重力ポテンシャルを \(\Phi_{\text{bottom}} = 0\)、頂上の重力ポテンシャルを \(\Phi_{\text{top}} = gh\) とする。
ポテンシャル差は、
一般の公式に代入すると、
これは重力赤方偏移の公式
と完全に一致する。\(\square\)
検算: 物理的意味を確認する。\(\Delta\nu < 0\) は、光がポテンシャルの高い場所に移動すると振動数が減少する(赤方偏移する)ことを意味し、問題 B-7. Doppler 効果から見た光の振動数 の結果(頂上から地面への光は青方偏移する)と整合している。
Medium(標準)¶
M-1. 異なる物質の自由落下エレベーター実験¶
→ 問題に戻る
問題:
慣性質量 \(m_I\) と重力質量 \(m_G\) が物質によって異なる値を持つと仮定する。自由落下するエレベーターの中で、鉄のボールとアルミのボールを同時に手から離したとき、何が観察されるか説明せよ。なぜこれが等価原理の破れを意味するのかも述べよ。
解法の方針: \(m_I/m_G\) が物質によって異なる場合に、自由落下するエレベーター内で何が起きるかを分析する。
計算:
地上の慣性系での各ボールの運動方程式は、
各ボールの加速度は、
エレベーターは自由落下しているが、エレベーター自体もある特定の \(m_G/m_I\) の比に従って加速している。エレベーターの加速度を \(\ddot{\boldsymbol{x}}_{\text{elev}} = (m_{G}/m_{I})_{\text{elev}}\,\boldsymbol{g}\) とする。
エレベーター内の観測者から見た各ボールの相対加速度は、
観察される現象:
\(m_G/m_I\) の値が鉄とアルミで異なる場合(\(m_{G,\text{Fe}}/m_{I,\text{Fe}} \neq m_{G,\text{Al}}/m_{I,\text{Al}}\))、二つのボールの相対加速度は、
したがって、同時に手から離した鉄のボールとアルミのボールは、エレベーター内で異なる加速度で運動する。一方のボールが他方に対して相対的に落下(または浮上)するのが観察される。
等価原理の破れとの関係:
等価原理(弱い等価原理)は、「自由落下する系は局所的に慣性系と等価である」と主張する。慣性系では重力が存在しないので、手から離したボールは(外力がなければ)静止したままでなければならない。
しかし、\(m_G/m_I\) が物質によって異なる場合、自由落下するエレベーター内でボールが相対的に動くことは、エレベーター内の観測者が重力の存在を検出できることを意味する。すなわち、自由落下系が慣性系と等価ではなくなり、等価原理が破れる。
検算:
\(m_{G}/m_{I}\) がすべての物質で等しい場合(\(m_{G,\text{Fe}}/m_{I,\text{Fe}} = m_{G,\text{Al}}/m_{I,\text{Al}}\))、相対加速度はゼロとなり、両ボールは静止したまま——等価原理が成り立つ。問題 B-5. \(m_I \neq m_G\) の場合の自由落下座標変換 および 問題 M-2. 多粒子系での等価原理 の結果と整合する。✓
M-2. 多粒子系での等価原理¶
→ 問題に戻る
問題:
\(N\) 個の粒子が一様重力場 \(\mathbf{g}\) の中にあり、粒子間に非重力的な力 \(\bar{F}\) が働いている。慣性質量と重力質量が等しい(\(m_I = m_G = m\))場合に、自由落下座標への変換
を施すことで、すべての粒子の運動方程式から同時に重力の項が消えることを示せ。また、\(m_{I} \neq m_{G}\) の場合にこの議論が破綻する理由を説明せよ。
解法の方針: \(N\) 個の粒子系に対して自由落下座標変換を施し、\(m_I = m_G\) の場合にすべての粒子から重力が消えることを示す。次に \(m_I \neq m_G\) の場合の破綻を議論する。
\(m_I = m_G\) の場合:
\(i\) 番目の粒子(\(i = 1, 2, \ldots, N\))の運動方程式は、
ここで \(m_i\) は \(i\) 番目の粒子の慣性質量であり、\(m_I = m_G\) を用いて重力質量も \(m_i\) としている。\(\bar{F}_{ij}\) は粒子 \(j\) から粒子 \(i\) への非重力的な力である。
自由落下座標への変換を施す:
問題 B-4. 自由落下座標への変換における速度と加速度 の結果より、
すなわち \(\ddot{\bar{x}}_i = \ddot{\bar{x}}_i' + \mathbf{g}\)。運動方程式に代入すると、
左辺を展開すると、
\(m_i\,\mathbf{g}\) が両辺で打ち消し合い、
ここで、力の引数について確認する。\(\bar{x}_i - \bar{x}_j = \left(\bar{x}_i' + \frac{1}{2}\mathbf{g}\,t^2\right) - \left(\bar{x}_j' + \frac{1}{2}\mathbf{g}\,t^2\right) = \bar{x}_i' - \bar{x}_j'\) であるから、
これは重力のない空間での運動方程式と全く同じ形である。この結果は粒子の番号 \(i\) に依存せず、すべての粒子に対して同時に重力項が消えている。これは座標変換 \(\frac{1}{2}\mathbf{g}\,t^2\) がすべての粒子に共通であり、かつ \(m_G/m_I = 1\) がすべての粒子で成り立つことによる。\(\square\)
\(m_I \neq m_G\) の場合の破綻:
\(i\) 番目の粒子の慣性質量を \(m_{i,I}\)、重力質量を \(m_{i,G}\) とすると、運動方程式は、
同じ座標変換を施すと、
残留する重力加速度は、
この残留項は比 \(m_{i,G}/m_{i,I}\) に依存する。もし \(m_{i,G}/m_{i,I}\) が粒子の種類によって異なれば、粒子ごとに異なる残留重力加速度が生じる。単一の座標変換ではすべての粒子の重力を同時に消すことができず、等価原理が破綻する。
仮に \(m_{i,G}/m_{i,I} = \alpha\)(全粒子共通の定数)であれば、座標変換を \(\bar{x}' = \bar{x} - \frac{1}{2}\alpha\,\mathbf{g}\,t^2\) に修正すれば重力を消せるが、\(\alpha\) が粒子ごとに異なる場合にはこの方法も使えない。
検算: \(m_{i,G} = m_{i,I}\) のとき残留項はゼロとなり、前半の結果と整合する。
M-3. 潮汐力と等価原理の局所性¶
→ 問題に戻る
問題:
潮汐力 (tidal force) について以下の問いに答えよ。
(a) 地球の中心から距離 \(r\) の位置における重力加速度は \(g(r) = GM/r^2\) である。地球の中心から距離 \(r_0\) にある自由落下系において、\(r_0\) から微小距離 \(\delta r\) だけ離れた点での重力加速度の差(潮汐加速度)\(\delta g\) を \(G\)、\(M\)、\(r_0\)、\(\delta r\) を用いて表せ。
(b) 等価原理が「十分に小さな領域」でのみ成り立つとはどういうことか、(a) の結果を用いて定量的に説明せよ。
(a) 潮汐加速度の導出:
地球の中心から距離 \(r\) における重力加速度は、
\(r_0\) から微小距離 \(\delta r\) だけ離れた点での重力加速度を Taylor 展開する:
\(|\delta r| \ll r_0\) として \((1 + x)^{-2} \approx 1 - 2x\) を用いると、
潮汐加速度(重力加速度の差)は、
負号は、\(\delta r > 0\)(\(r_0\) より遠い点)では重力加速度が弱くなることを意味する。すなわち、自由落下系から見ると、\(r_0\) より遠い点の物体は \(r_0\) から遠ざかる方向に加速し、\(r_0\) より近い点の物体は \(r_0\) に近づく方向に加速する(動径方向の引き伸ばし効果)。
検算: 次元を確認する。\([GM/r_0^3 \cdot \delta r] = (\text{m}^3/\text{s}^2)/\text{m}^3 \cdot \text{m} = \text{m/s}^2\)。加速度の次元で正しい。また、\(\delta r \to 0\) で \(\delta g \to 0\) となるのも妥当。
(b) 等価原理が「十分に小さな領域」でのみ成り立つことの定量的説明:
等価原理は、自由落下する座標系において重力が消えることを主張する。しかし、(a) で示したように、自由落下の基準点 \(r_0\) から距離 \(\delta r\) だけ離れた点では、潮汐加速度
が残存する。この潮汐加速度は自由落下によっては消去できない(重力場の非一様性に起因するため)。
等価原理が良い近似として成り立つためには、潮汐加速度が測定精度 \(a_{\min}\)(あるいは注目する物理現象の典型的な加速度スケール \(a_{\text{typ}}\))に比べて十分に小さい必要がある:
これを \(\delta r\) に対する制約として書くと、
例えば、地球表面(\(r_0 = R \approx 6.4 \times 10^6\;\text{m}\)、\(g = GM/R^2 \approx 9.8\;\text{m/s}^2\))で潮汐加速度を \(g\) の \(10^{-6}\) 以下に抑えたい場合:
つまり、地球表面では数メートルの範囲内であれば等価原理は \(10^{-6}\) の精度で成り立つ。一方、重力場の変化が急激な場所(例えばブラックホール近傍で \(r_0\) が小さい場合)では、\(r_0^3\) が小さくなるため、等価原理が成り立つ領域はさらに狭くなる。
M-4. 等価原理からの重力赤方偏移の導出¶
→ 問題に戻る
問題:
等価原理 (equivalence principle) を用いて、重力赤方偏移の公式
を導出せよ。以下の手順に従うこと。
(a) 塔の頂上から光が発射された瞬間に自由落下を始める観測者を設定し、この観測者が慣性系にいることを等価原理から説明せよ。
(b) 光が地面に到達するまでの時間 \(\Delta t\) と、その間に地面の装置が自由落下系に対して獲得する速度 \(v\) を求めよ。
(c) Doppler 効果の非相対論的近似を適用して、地面から頂上へ光を送った場合の振動数変化を導け。
(a) 自由落下観測者が慣性系にいることの説明:
塔の頂上から光が発射された瞬間に、その場所で静止していた観測者が自由落下を始めるとする。
等価原理によれば、自由落下する系は局所的に慣性系と等価である。これは、一様な重力場の効果が自由落下という座標変換によって消去されるためである(問題 B-4. 自由落下座標への変換における速度と加速度, 問題 B-5. \(m_I \neq m_G\) の場合の自由落下座標変換 で確認した通り、\(m_I = m_G\) のとき座標変換 \(\bar{x}' = \bar{x} - \frac{1}{2}\mathbf{g}\,t^2\) により運動方程式から重力項が消える)。
したがって、この自由落下する観測者の系では特殊相対論がそのまま適用でき、光は速度 \(c\) で直進し、Doppler 効果などの特殊相対論の結果をそのまま使うことができる。
(b) 移動時間と獲得速度:
自由落下する観測者から見ると、光は速度 \(c\) で塔の頂上から地面に向かって進む。光が高さ \(h\) を移動するのにかかる時間は、
(\(gh/c^2 \ll 1\) の近似で、重力による高次の補正は無視できる。)
自由落下する観測者から見ると、地面の装置は上向きに加速度 \(g\) で加速している(自由落下系では重力が消えるので、地面が加速してくるように見える)。時間 \(\Delta t\) の間に地面の装置が獲得する速度は、
(c) 重力赤方偏移の導出:
頂上から地面への光(青方偏移):
自由落下系から見ると、地面の装置は光源(頂上)に向かって速度 \(v = gh/c\) で近づいている。特殊相対論の Doppler 効果の非相対論的近似(\(v \ll c\))を適用すると、地面で受け取る振動数 \(\nu\) は、
ここで \(\nu'\) は頂上で発射された光の振動数である。\(\nu > \nu'\) なので、頂上から地面に向かう光は青方偏移する。
地面から頂上への光(赤方偏移):
逆に、地面から頂上に光を送る場合を考える。同様に、光が発射された瞬間に地面で自由落下を始める観測者を設定する。この観測者から見ると、頂上の装置は光源(地面)から速度 \(v = gh/c\) で遠ざかっている。Doppler 効果により、
振動数の変化は、
これが重力赤方偏移の公式である。光がポテンシャルの高い場所に移動すると振動数が減少(赤方偏移)し、ポテンシャルの低い場所に移動すると振動数が増加(青方偏移)する。
検算: 次元を確認する。\([gh/c^2] = (\text{m/s}^2)(\text{m})/(\text{m/s})^2 = \text{無次元}\)。振動数の比なので無次元であるべきで、整合する。また、\(h \to 0\) で \(\Delta\nu/\nu \to 0\) となり、高さの差がなければ振動数変化がないことも妥当。
M-5. 東京スカイツリーでの時計のずれ¶
→ 問題に戻る
問題:
高さ \(h = 450\) m の東京スカイツリーの頂上と地面で、1 日あたりの時計のずれを見積もれ。\(g \approx 9.8\;\text{m/s}^2\)、\(c \approx 3.0 \times 10^8\;\text{m/s}\) を使え。
解法の方針: 重力赤方偏移の公式を用いて、高さ \(h\) の差による 1 日あたりの時計のずれを見積もる。
計算:
重力赤方偏移による固有時の差は、問題 A-1. 重力赤方偏移から導く計量の修正 (a) の結果より、
一様重力場の近似(\(h \ll R_\oplus\))では、ポテンシャル差は、
ここで \(g = 9.8\;\text{m/s}^2\), \(h = 450\;\text{m}\), \(c = 3.0 \times 10^8\;\text{m/s}\)。
相対的な時間のずれ(無次元):
1 日あたりの時計のずれ:
1 日 \(= 86400\;\text{s}\) なので、
頂上の時計は地面の時計に比べて1 日あたり約 4.2 ナノ秒速く進む。これは頂上の方が重力ポテンシャルが高い(重力が弱い)ため、一般相対論的な重力赤方偏移の効果で時間がより速く流れることに対応する。
検算:
次元確認: \([gh/c^2] = (\text{m/s}^2)(\text{m})/(\text{m/s})^2 = \text{無次元}\)。正しい。✓
実験との比較: 2012 年に東京大学の香取秀俊らのグループが光格子時計を用いて東京スカイツリーの地上と展望台(高さ約 450 m)の間で重力赤方偏移を実測し、一般相対論の予測と一致する結果を得ている。本計算の \(\sim 4\;\text{ns/日}\) は、この実験の精度(\(10^{-18}\) レベルの光格子時計で十分検出可能)と整合する。✓
\(h = 0\) の極限: \(\Delta\tau = 0\) となり、高さの差がなければ時計のずれがないことも妥当。✓
M-6. Newton 力学と一般相対論の解釈の転換¶
→ 問題に戻る
問題:
Newton 力学では「地面に静止している観測者が慣性系にいて、落下するリンゴに重力という力が働いている」と解釈する。一般相対論ではこの解釈がどう変わるか、以下の用語をすべて用いて説明せよ:自由落下、慣性運動、測地線 (geodesic)、時空の曲率 (curvature)。
Newton 力学の解釈:
Newton 力学では、地面に静止している観測者は慣性系にいると見なされる。リンゴは重力という「力」を受けて加速し、地面に向かって落下する。リンゴの運動は \(F = mg\) という力の作用の結果であり、地面に立っている人は力を受けていない(正確には、重力と垂直抗力が釣り合っている)自然な状態にある。
一般相対論の解釈:
一般相対論では、この解釈が根本的に逆転する。
-
自由落下こそが慣性運動である: 落下するリンゴは、外力を受けずに運動している。これは Newton 力学における「慣性運動」(力を受けない物体が等速直線運動する)の一般相対論版である。リンゴは曲がった時空の曲率 (curvature) の中で、最も自然な経路である測地線 (geodesic) を辿っている。測地線とは、曲がった時空における「最も真っ直ぐな」経路であり、自由落下する物体の世界線に対応する。
-
地面に立っている人の方が加速している: 地面に静止している観測者は、地面からの垂直抗力を受けて測地線から外れている。つまり、一般相対論の意味では加速しているのは地面に立っている人の方である。加速度計(例えばバネ秤)を持てば、地面に立っている人は \(g\) の加速度を検出するが、自由落下するリンゴは加速度ゼロを示す。
-
重力は力ではなく時空の性質: 重力は電磁気力のような「力」ではなく、質量・エネルギーによって生じる時空の曲率の表れである。物体は曲がった時空の中で測地線を辿るだけであり、「重力に引っ張られている」のではない。地球の周りの時空が曲がっているために、自由落下する物体の測地線が地球に向かう経路になっているのである。
まとめると、Newton 力学では「重力という力がリンゴを引っ張る」のに対し、一般相対論では「リンゴは曲がった時空の測地線を辿る慣性運動をしているだけであり、地面に立っている人の方が加速している」と解釈される。
Advanced(発展)¶
A-1. 重力赤方偏移から導く計量の修正¶
→ 問題に戻る
問題:
等価原理と特殊相対論の知識を組み合わせて、以下を論ぜよ。
静止質量 \(m\) の物体が重力ポテンシャル \(\Phi_1\) の位置から \(\Phi_2\)(\(\Phi_2 > \Phi_1\))の位置まで持ち上げられた。
(a) 重力赤方偏移の結果から、ポテンシャル \(\Phi\) の位置に置かれた時計の固有時 (proper time) \(d\tau\) と、無限遠(\(\Phi = 0\))の座標時 \(dt\) の関係が
と書けることを説明せよ(\(|\Phi|/c^2 \ll 1\) の近似)。
(b) この結果を用いて、Minkowski (ミンコフスキー) 計量 (metric) \(ds^2 = -c^2 dt^2 + dx^2 + dy^2 + dz^2\) が弱い重力場の存在下でどのように修正されるか、\(g_{00}\) 成分の変化として表せ。
(c) (b) の結果は、「重力場のある時空は Minkowski 時空ではない」こと、すなわち時空が曲がっていることの最初の兆候である。この議論が、第 3 章の Lorentz 系の概念とどのように矛盾し、なぜ一般相対論への拡張が不可避であるかを論ぜよ。
(a) 固有時と座標時の関係:
重力赤方偏移の結果を用いて、ポテンシャル \(\Phi\) の位置にある時計の固有時と無限遠の座標時の関係を導く。
問題 B-8. ポテンシャル形式の重力赤方偏移公式 で導出した重力赤方偏移の一般公式より、ポテンシャル \(\Phi_{\text{emit}}\) の位置から発射された光がポテンシャル \(\Phi_{\text{obs}}\) の位置で観測されるとき、
ポテンシャル \(\Phi\)(\(\Phi < 0\))の位置から無限遠(\(\Phi = 0\))に光を送る場合、\(\Phi_{\text{emit}} = \Phi\)、\(\Phi_{\text{obs}} = 0\) として、
\(\Phi < 0\) なので \(\nu_\infty < \nu(\Phi)\) となり、これは赤方偏移(重力ポテンシャルの深い場所から出た光は、無限遠で振動数が低下する)を正しく表している。
すなわち、
次に、振動数と固有時の関係を用いる。振動数は固有時の逆数に比例する(\(\nu \propto 1/d\tau\))。ポテンシャル \(\Phi\) の位置にある時計の 1 振動の固有時を \(d\tau\)、無限遠の座標時での同じ振動に対応する時間間隔を \(dt\) とすると、
上の赤方偏移の関係式に代入すると、
これを \(d\tau\) について解くと、
物理的意味: \(\Phi < 0\)(重力ポテンシャルが低い場所)では \(d\tau < dt\) となり、重力場の深い場所にある時計は無限遠の時計に比べてゆっくり進む。これは重力による時間の遅れである。
検算: \(\Phi = 0\)(無限遠)では \(d\tau = dt\) となり、座標時と固有時が一致する。\(\Phi < 0\) で \(d\tau < dt\) は、重力場中の時計が遅れるという Pound-Rebka 実験の結果と整合する。
(b) 弱い重力場での計量の修正:
静止した粒子の世界線では \(dx = dy = dz = 0\) であるから、Minkowski 計量 \(ds^2 = -c^2 dt^2 + dx^2 + dy^2 + dz^2\) において、
一方、世界線に沿った固有時 \(d\tau\) との関係は \(ds^2 = -c^2 d\tau^2\) であるから、
(ここで計量の符号規約 \((-,+,+,+)\) を用いている。)
(a) の結果 \(d\tau \approx (1 + \Phi/c^2)\,dt\) を代入すると、
(\(|\Phi|/c^2 \ll 1\) で 2 次の項を無視。)
\(d\tau^2 = -g_{00}\,dt^2\) と比較して、
したがって、弱い重力場の存在下での計量は、
検算: \(\Phi = 0\)(重力場なし)のとき \(g_{00} = -1\) となり、Minkowski 計量に戻る。次元も \([\Phi/c^2]\) は無次元で正しい。
(c) Lorentz 系の概念との矛盾と一般相対論への拡張の不可避性:
(b) の結果は、重力場が存在する時空では計量成分 \(g_{00}\) が位置に依存することを示している:
これは以下の点で第 3〜4 章の Lorentz 系(慣性系)の概念と根本的に矛盾する:
-
Minkowski 計量の破れ: 第 4 章で学んだ特殊相対論では、慣性系において計量は \(\eta_{\mu\nu} = \text{diag}(-1, +1, +1, +1)\) という定数行列で与えられる。しかし (b) の結果では \(g_{00}\) が空間座標の関数であり、計量が Minkowski 形ではない。これは、重力場のある時空が Minkowski 時空ではないことを意味する。
-
大域的慣性系の不在: 特殊相対論では、時空全体をカバーする慣性系(Lorentz 系)が存在し、その中で物理法則は Lorentz 共変な形をとる。しかし、等価原理は慣性系の存在を局所的にのみ保証する。任意の時空点の近傍では自由落下座標系を取ることで Minkowski 計量を回復できるが、時空全体で Minkowski 形にできる単一の座標系は一般には存在しない。これは、曲がった曲面上で局所的には平面に近似できるが、全体を平面に展開できないことと同じである。
-
時空の曲率の必然性: \(g_{00}\) が位置に依存するということは、計量テンソルが非自明な構造を持つことを意味し、これは数学的には時空が曲がっていることに対応する。重力赤方偏移という実験的に検証された現象が計量の位置依存性を要求する以上、重力を記述するためには Minkowski 時空を超えた枠組み — すなわち曲がった時空の幾何学 — が必要である。
-
等価原理が示す道筋: 等価原理は「局所的には特殊相対論が成り立つ」ことを保証する。これは微分幾何学の言葉で言えば、「曲がった多様体の各点の接空間は Minkowski 空間である」ということに対応する。つまり、重力を含む物理は「局所的に平坦だが大域的に曲がった時空」の上で定式化されるべきであり、これはまさに Riemann 幾何学の枠組みである。
以上の理由から、重力を含む物理を記述するためには、特殊相対論の枠組み(大域的 Minkowski 時空 + Lorentz 変換)を拡張し、一般の曲がった時空上での物理法則を定式化する一般相対論への移行が不可避となる。等価原理は、この拡張の出発点として、「局所的には特殊相対論が成り立つ」という橋渡しの役割を果たしている。
A-2. GPS 衛星の相対論的補正¶
→ 問題に戻る
問題:
地球(質量 \(M\)、半径 \(R\))の表面に立つ観測者 A と、地上高 \(H\) の軌道を等速円運動する衛星に乗った観測者 B がいる。
(a) 重力赤方偏移の効果により、B の時計は A の時計に対して 1 秒あたりどれだけ速く進むか。ポテンシャル差
を用いて、比 \(\Delta\tau_{\text{grav}}/\Delta t\) を求めよ。(注:\(H \ll R\) の場合は \(\Delta\Phi \approx gH\) に帰着するが、GPS 衛星では \(H \approx 3.2R\) なのでこの近似は使えない。)
(b) 第 3 章で学んだ特殊相対論の時間の遅れ (time dilation) の効果により、軌道速度 \(v = \sqrt{gR^2/(R+H)} \approx \sqrt{g(R+H)}\) で運動する衛星の時計は A に対してどれだけ遅く進むか。\(v \ll c\) として比 \(\Delta\tau_{\text{SR}}/\Delta t\) を求めよ。
(c) GPS 衛星(\(H \approx 20{,}200\;\text{km}\))の場合に、(a) と (b) の効果の大きさを比較し、どちらが支配的かを判定せよ。必要に応じて \(g \approx 9.8\;\text{m/s}^2\)、\(R \approx 6{,}370\;\text{km}\)、\(c \approx 3.0 \times 10^8\;\text{m/s}\) を用いよ。
(a) 重力赤方偏移による時計の進みの差:
地表(ポテンシャル \(\Phi_A = -GM/R\))と高度 \(H\) の衛星(ポテンシャル \(\Phi_B = -GM/(R+H)\))の間のポテンシャル差は、
問題 A-1. 重力赤方偏移から導く計量の修正 (a) の結果より、各位置での固有時と座標時の関係は、
B の時計が A の時計に対して 1 秒あたりどれだけ速く進むかは、
正の値なので、高い位置にある衛星の時計は地上の時計より速く進む。
(b) 特殊相対論の時間の遅れによる効果:
衛星の軌道速度は、円軌道の条件(向心加速度 = 重力加速度)から、
特殊相対論の時間の遅れにより、速度 \(v\) で運動する時計の固有時は、
地上の時計に対する差は、
負の値なので、運動する衛星の時計は地上の時計より遅く進む。
(注:厳密には地上の観測者も地球の自転により運動しているが、地上の自転速度は衛星の軌道速度より十分小さいため、ここでは地上の観測者を静止と近似する。)
(c) GPS 衛星での数値比較:
与えられた値:\(H = 20{,}200\;\text{km} = 2.02 \times 10^7\;\text{m}\)、\(g = 9.8\;\text{m/s}^2\)、\(R = 6{,}370\;\text{km} = 6.37 \times 10^6\;\text{m}\)、\(c = 3.0 \times 10^8\;\text{m/s}\)。
重力赤方偏移の効果:
分子:\(9.8 \times 6.37 \times 10^6 \times 2.02 \times 10^7 = 9.8 \times 1.287 \times 10^{14} = 1.261 \times 10^{15}\)
分母:\(9.0 \times 10^{16} \times 2.657 \times 10^7 = 2.391 \times 10^{24}\)
1 日あたりの時間差:\(5.27 \times 10^{-10} \times 86{,}400\;\text{s} \approx 45.5\;\mu\text{s}\)(衛星の時計が速く進む)。
特殊相対論の時間の遅れの効果:
(検算:\(v = \sqrt{1.497 \times 10^7} \approx 3.87 \times 10^3\;\text{m/s} \approx 3.9\;\text{km/s}\)。GPS 衛星の軌道速度として妥当。✓)
1 日あたりの時間差:\(-8.3 \times 10^{-11} \times 86{,}400\;\text{s} \approx -7.2\;\mu\text{s}\)(衛星の時計が遅く進む)。
比較:
| 効果 | \(\Delta\tau/\Delta t\) | 1 日あたりの時間差 |
|---|---|---|
| 重力赤方偏移 | \(+5.3 \times 10^{-10}\) | \(\approx +45.5\;\mu\text{s}\)(速く進む) |
| 特殊相対論の時間の遅れ | \(-8.3 \times 10^{-11}\) | \(\approx -7.2\;\mu\text{s}\)(遅く進む) |
| 合計 | \(+4.4 \times 10^{-10}\) | \(\approx +38.3\;\mu\text{s}\)(速く進む) |
(注:\(H \ll R\) の近似 \(\Delta\Phi \approx gH\) を使うと重力効果は \(+190\;\mu\text{s}/\text{day}\) と過大評価される。GPS 衛星では \(H \approx 3.2R\) なので、正確なポテンシャル差 \(\Delta\Phi = gRH/(R+H)\) を使う必要がある。)
結論: 重力赤方偏移の効果の方が支配的であり、GPS 衛星の時計は地上の時計に対して速く進む。この補正を行わないと、光速 \(c\) で伝播する信号の位置決定精度に大きな誤差が蓄積してしまう。GPS が正常に機能するためには、一般相対論(重力赤方偏移)と特殊相対論(時間の遅れ)の両方の効果を考慮した時計の補正が不可欠である。
検算: - 重力効果と速度効果の符号が逆であることは物理的に正しい(高い場所の時計は速く進み、動いている時計は遅く進む)。 - 合計の効果が正(衛星の時計が速い)であることは、GPS の実際の運用で衛星の時計を地上に合わせるためにわずかに遅く設定して打ち上げるという事実と整合する。 - \(H = 0\) のとき重力効果はゼロ、\(v^2 = gR\) となり速度効果のみが残る。\(v = 0\) のとき速度効果はゼロで重力効果のみが残る。いずれも妥当な極限。
このページについてフィードバック
分からなかった箇所、誤りの指摘、改善提案などをお寄せください。