Apéndice D Cantidades de curvatura de espaciotiempos representativos: Formulario¶
Resumen de lo anterior: Hasta Apéndice C, hemos preparado las técnicas de cálculo del análisis tensorial y las herramientas de las formas diferenciales. A lo largo del texto principal hasta ahora, hemos tratado muchos espaciotiempos concretos como el espaciotiempo de Schwarzschild, el espaciotiempo esféricamente simétrico general y el modelo cosmológico de Friedmann-Robertson-Walker (FRW). Sin embargo, buscar cada vez los resultados dispersos en los distintos capítulos es tedioso.
Objetivo de este capítulo
- Organizar en tablas de referencia la métrica, los símbolos de Christoffel, el tensor de curvatura de Riemann y el tensor de Einstein para los espaciotiempos representativos que han aparecido en todos los capítulos anteriores
- Completar un formulario que pueda consultarse repetidamente como "diccionario" en aplicaciones y ejercicios futuros
🟡 Lina: Bien, chicos. Ha sido un largo viaje hasta aquí. Empezamos con la relatividad especial, luego el espaciotiempo curvado, las geodésicas, los agujeros negros, la cosmología y las ecuaciones de Einstein — hemos aprendido una cantidad enorme de material.
🔵 Kai: Sinceramente, siento que mi cabeza va a explotar... Los símbolos de Christoffel de Schwarzschild, el tensor de Einstein de FRW... siempre me pasa que pienso "¿cómo era eso?"
⚪ Mei: A mí también. Recalcular todo desde cero cada vez no es realista.
🟡 Lina: Por eso mismo creamos este capítulo. Quiero que lo usen con la misma idea de llevar un formulario de matemáticas a un examen — como un diccionario de relatividad general. No vamos solo a recopilar "resultados" de cálculos, sino que también confirmaremos el significado físico de cada cantidad mientras avanzamos.
D.1 Confirmación de las definiciones básicas¶
🟡 Lina: Primero, voy a reunir en un solo lugar las definiciones de todas las cantidades geométricas que aparecen en el formulario. Esto también sirve como resumen del contenido aprendido desde el capítulo 4 en adelante. Para la visión general de las 3 métricas principales que tratamos en este capítulo, mira la Fig. D.1「Comparación de las métricas principales」. Minkowski (plano), Schwarzschild (vacío esféricamente simétrico) y FRW (universo homogéneo e isótropo) — estas tres son las métricas más fundamentales en relatividad general.
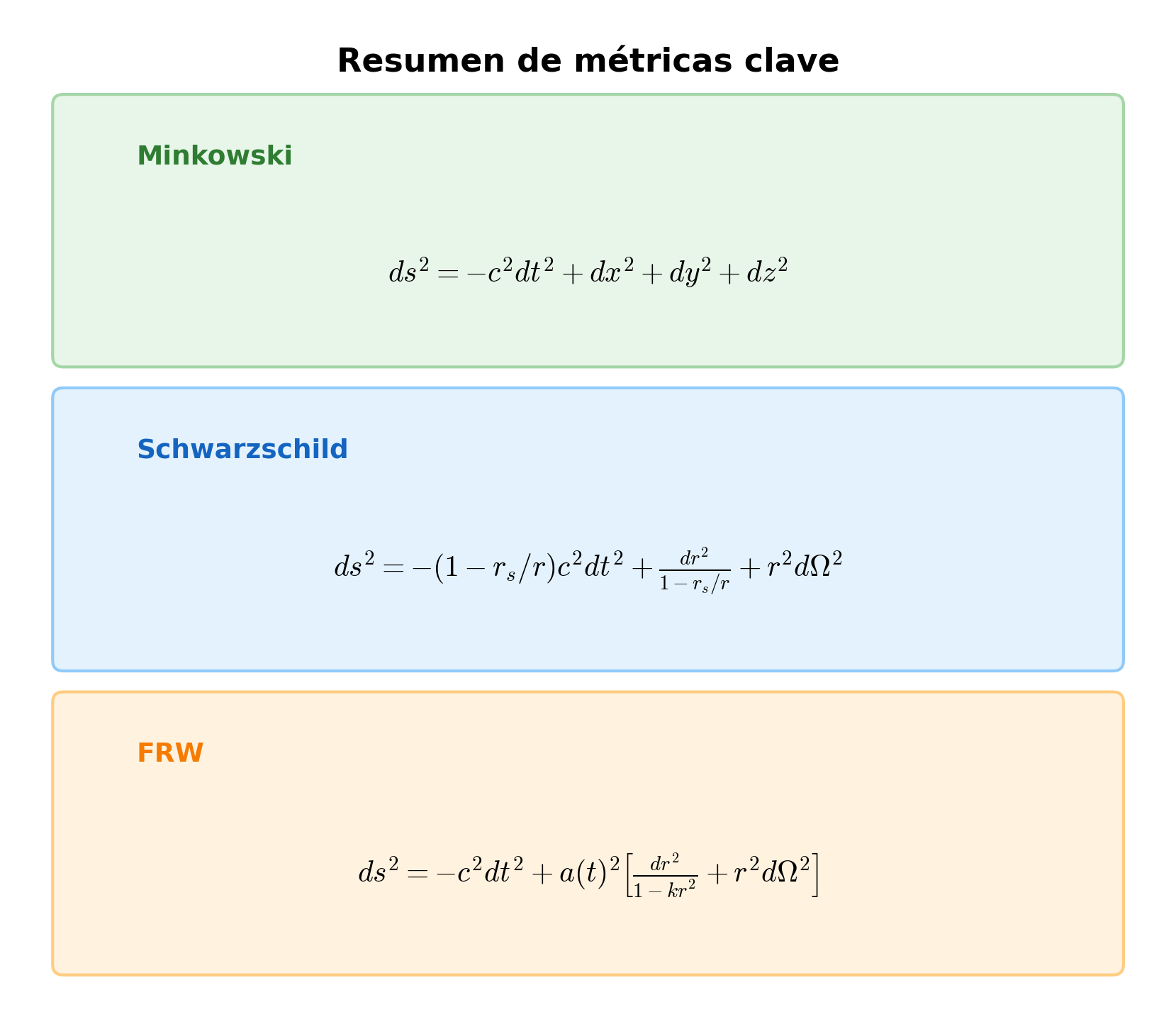
Fig. D.1: Comparación de las métricas principales. Las 3 métricas principales: Minkowski, Schwarzschild y FRW.
D.1.1 Tensor métrico (metric tensor)¶
🟡 Lina: El tensor métrico \(g_{\alpha\beta}\) es la "regla" del espaciotiempo. Define el elemento de línea entre dos puntos como
En el espaciotiempo plano de Minkowski, \(g_{\alpha\beta} = \eta_{\alpha\beta} = \mathrm{diag}(-1, +1, +1, +1)\). Cuando hay gravedad, \(g_{\alpha\beta}\) se convierte en una función de las coordenadas.
🔵 Kai: El tensor métrico representa "el campo gravitatorio en sí mismo", ¿verdad?
🟡 Lina: Exacto. En el modelo de Newton, el potencial gravitatorio \(\Phi\) representaba el campo gravitatorio, pero en el modelo de Einstein es el tensor métrico \(g_{\alpha\beta}\) el que desempeña ese papel.
D.1.2 Símbolos de Christoffel¶
🟡 Lina: Como se puede ver en la definición, si intercambias \(\nu\) y \(\sigma\), el lado derecho no cambia. Es decir, son simétricos en los índices inferiores: \(\Gamma^\mu{}_{\nu\sigma} = \Gamma^\mu{}_{\sigma\nu}\). Esto reduce el número de componentes independientes casi a la mitad.
⚪ Mei: Es una propiedad que se sigue automáticamente de la estructura de la definición.
🟡 Lina: Físicamente, es la cantidad que aparece en la ecuación de las geodésicas
Nos dice qué significa "ir en línea recta" en un espaciotiempo curvo.
D.1.3 Tensor de curvatura de Riemann¶
🔵 Kai: Un tensor de rango 4... con solo ver la fórmula no me queda nada claro qué representa. ¿Qué significa que esté relacionado con las fuerzas de marea?
🟡 Lina: Intuitivamente, dos partículas que caen libremente una cerca de la otra se acercan o se alejan mutuamente — lo que determina esa "aceleración relativa" es el tensor de Riemann. Si dejas caer dos bolas una encima de otra cerca de la Tierra, la de abajo siente una gravedad más fuerte así que la separación aumenta, ¿verdad? Esa es la fuerza de marea, y el papel del tensor de Riemann es describir con precisión su magnitud y dirección.
Ahora bien, como es un tensor de rango 4, cada índice toma 4 valores del 0 al 3, así que hay \(4^4 = 256\) componentes en total. Pero debido a las simetrías, solo hay 20 componentes independientes. Te muestro el esquema del conteo:
- \(R_{\alpha\beta\gamma\delta} = -R_{\beta\alpha\gamma\delta}\) (antisimetría en el 1.° y 2.° índices)
- \(R_{\alpha\beta\gamma\delta} = -R_{\alpha\beta\delta\gamma}\) (antisimetría en el 3.° y 4.° índices)
- \(R_{\alpha\beta\gamma\delta} = R_{\gamma\delta\alpha\beta}\) (simetría de intercambio de los pares primera mitad y segunda mitad)
- \(R_{\alpha\beta\gamma\delta} + R_{\alpha\gamma\delta\beta} + R_{\alpha\delta\beta\gamma} = 0\) (primera identidad de Bianchi: la suma cíclica sobre los índices 2.°–4.° es cero)
De las dos primeras antisimetrías, las combinaciones \([\alpha\beta]\) son \(\binom{4}{2} = 6\) y las combinaciones \([\gamma\delta]\) también son 6. Es decir, hay \(6 \times 6 = 36\) combinaciones independientes. Además, por la tercera simetría (intercambio de primera y segunda mitad), el valor no cambia al intercambiar \([\alpha\beta]\) y \([\gamma\delta]\). Aquí voy a usar una técnica conveniente para contar las componentes independientes. Las componentes del tensor de rango 4 \(R_{\alpha\beta\gamma\delta}\) tienen 4 índices y son complicadas, pero gracias a la antisimetría, podemos considerar los pares \([\alpha\beta]\) y \([\gamma\delta]\) cada uno como "una sola etiqueta". Como hay 6 pares posibles, podemos reorganizar las componentes independientes de \(R_{\alpha\beta\gamma\delta}\) en una tabla (matriz) de \(6 \times 6\). Consideramos una matriz \(6 \times 6\) donde los 6 pares \([\alpha\beta]\) son los números de fila y los 6 pares \([\gamma\delta]\) son los números de columna. Concretamente, asignamos números \(i = 1, 2, \ldots, 6\) a los 6 pares antisimétricos como \([01], [02], [03], [12], [13], [23]\), y construimos la matriz \(M_{ij} = R_{[\alpha\beta]_i [\gamma\delta]_j}\). Por ejemplo, \(M_{12} = R_{0102}\) (combinación del par \([01]\) y el par \([02]\)), \(M_{21} = R_{0201}\) (combinación del par \([02]\) y el par \([01]\)), y por la simetría de intercambio \(R_{\alpha\beta\gamma\delta} = R_{\gamma\delta\alpha\beta}\) se sigue que \(M_{12} = M_{21}\). En general, esta simetría de intercambio corresponde a la simetría de la matriz \(M_{ij} = M_{ji}\).
🔵 Kai: Ya veo, se "comprime" el tensor de rango 4 en una matriz de rango 2 para tener una visión más clara. El conteo de componentes independientes de una matriz simétrica ya lo conozco.
🟡 Lina: Exacto. En una matriz simétrica, la componente \((i,j)\) es igual a la \((j,i)\), así que las componentes independientes son solo "las diagonales" y "las que están por encima de la diagonal". Para una matriz \(6 \times 6\), hay 6 componentes diagonales y \(5 + 4 + 3 + 2 + 1 = 15\) componentes no diagonales por encima de la diagonal (la fila 1 tiene 5 a su derecha, la fila 2 tiene 4, y así sucesivamente). En total \(6 + 15 = 21\). Este es el resultado de la fórmula general \(n(n+1)/2\) para una matriz simétrica \(n \times n\) con \(n = 6\).
⚪ Mei: Hasta aquí tenemos 21. Pero en la lista de simetrías de antes había una más, ¿verdad?
🟡 Lina: Buena memoria. Sí, la identidad de Bianchi todavía no se ha usado. \(R_{\alpha\beta\gamma\delta} + R_{\alpha\gamma\delta\beta} + R_{\alpha\delta\beta\gamma} = 0\) — esta da una nueva restricción solo cuando los 4 índices son todos diferentes. Si hay repeticiones entre los índices, cada término se anula por la antisimetría o se cancelan entre sí, y la identidad se satisface trivialmente.
🔵 Kai: ¿Qué significa eso concretamente?
🟡 Lina: Te muestro un solo ejemplo, el más fácil de ver. Si \(\alpha = \beta\), el primer término es \(R_{\alpha\alpha\gamma\delta} = 0\) (por la antisimetría en los dos primeros índices, cuando aparece el mismo índice da cero). Los términos restantes también son cero de manera similar, así que \(0 + 0 + 0 = 0\) es trivial. Para otros patrones de repetición (por ejemplo \(\gamma = \alpha\)) también se satisface trivialmente de manera similar — si te interesa, pruébalo como ejercicio.
⚪ Mei: Es decir, la única información realmente nueva viene del caso en que los 4 índices son todos diferentes.
🟡 Lina: Exacto. En 4 dimensiones, consideramos el caso en que se usan los 4 valores \((0,1,2,3)\). La identidad de Bianchi tiene la forma de una suma cíclica sobre los índices 2.°–4.° con el primer índice \(\alpha\) fijo. Hay 4 opciones para \(\alpha\), pero en realidad todas dan la misma ecuación. Veámoslo concretamente. Si elegimos \(\alpha = 0\), obtenemos \(R_{0123} + R_{0231} + R_{0312} = 0\). Si elegimos \(\alpha = 1\), obtenemos \(R_{1023} + R_{1230} + R_{1302} = 0\). Sin embargo, usando las simetrías, esta ecuación se reduce al mismo contenido que el caso \(\alpha = 0\).
🔵 Kai: ¿Eh? ¿Con \(\alpha\) diferente se obtiene la misma ecuación?
🟡 Lina: Sí. Por ejemplo, \(R_{1023}\) por la antisimetría en los dos primeros índices \(R_{\alpha\beta\gamma\delta} = -R_{\beta\alpha\gamma\delta}\) se obtiene directamente \(R_{1023} = -R_{0123}\) (simplemente intercambiando los índices 1 y 0). Para \(R_{1230}\), usando la simetría de intercambio de pares \(R_{\alpha\beta\gamma\delta} = R_{\gamma\delta\alpha\beta}\) se obtiene \(R_{1230} = R_{3012}\), y luego por la antisimetría en los dos primeros índices \(R_{3012} = -R_{0312}\), que se reduce al tercer término de la ecuación con \(\alpha = 0\). \(R_{1302}\) también se reduce con el mismo procedimiento al segundo término de la ecuación con \(\alpha = 0\) (los casos restantes \(\alpha = 2, 3\) se verifican de manera similar — pruébalo como ejercicio). Así que solo hay 1 identidad de Bianchi independiente. En definitiva, \(21 - 1 = 20\) son las componentes independientes.
⚪ Mei: Se va acotando una por una usando cada simetría: 256 → 36 → 21 → 20. Es una estructura elegante.
D.1.4 Tensor de Ricci y curvatura escalar¶
🟡 Lina: El tensor de Riemann tiene rango 4 y contiene demasiada información, así que contrayendo un par de índices (es decir, igualando un índice superior y uno inferior con la misma letra y sumando — la operación de contracción), obtenemos un tensor de rango 2: el tensor de Ricci \(R_{\mu\nu}\). Mirando la definición \(R_{\mu\nu} = R^\rho{}_{\mu\rho\nu}\), se ve que en el tensor original de Riemann \(R^\alpha{}_{\beta\gamma\delta}\), se igualan el primer índice (superior \(\alpha\)) y el tercer índice (inferior \(\gamma\)) con la misma letra \(\rho\) y se suma para \(\rho = 0, 1, 2, 3\). Los índices restantes, el 2.° y el 4.°, se convierten en \(\mu\), \(\nu\) del tensor de Ricci. Mientras que el tensor de Riemann registra "la fuerza de marea en cada dirección", el tensor de Ricci lo resume como "el cambio de volumen a lo largo de cierta dirección". Concretamente, representa la tasa de cambio del volumen de una pequeña esfera en caída libre que se aplasta o estira por la gravedad de la materia circundante.
🔵 Kai: ¿Qué significa intuitivamente que "sumar las fuerzas de marea en cada dirección" da "el cambio de volumen"?
🟡 Lina: Buena pregunta. Por ejemplo, piensa en una esfera pequeña. El tensor de Riemann registra individualmente cada deformación: "se aplasta en la dirección \(x\)", "se estira en la dirección \(y\)", "se aplasta en la dirección \(z\)"... La contracción del tensor de Ricci \(R_{\mu\nu}\) corresponde a la operación de sumar estas deformaciones sobre todas las direcciones. Si sumas las deformaciones en todas las direcciones, puedes saber si el volumen total de la esfera aumenta o disminuye, ¿no? Por eso la contracción corresponde al cambio de volumen. Además, su traza (el promedio sobre todas las direcciones) es la curvatura escalar \(R\). El tensor de Einstein se construye a partir de estos dos.
⚪ Mei: Riemann es "la fuerza de marea en cada dirección" y Ricci es su "resumen" — el resultado de sumar las deformaciones en todas las direcciones.
🟡 Lina: Exacto.
D.1.5 Tensor de Einstein¶
🟡 Lina: La ecuación de Einstein es (en unidades geométricas \(G = c = 1\))
El lado izquierdo \(G_{\mu\nu}\) es la curvatura del espaciotiempo, el lado derecho \(T_{\mu\nu}\) es la distribución de energía-momento. La razón por la que aparece \(G_{\mu\nu}\) y no \(R_{\mu\nu}\) en el lado izquierdo es que \(G_{\mu\nu}\) satisface automáticamente la identidad \(\nabla^\mu G_{\mu\nu} = 0\) (derivada de la identidad de Bianchi). Aquí \(\nabla_\mu\) es la derivada covariante — el operador de diferenciación en espaciotiempo curvo que añade términos de corrección con símbolos de Christoffel a la derivada parcial ordinaria \(\partial_\mu\) (lo estudiamos en detalle en Cap. 12 del texto principal). Intuitivamente, piénsalo como "la derivada que extrae la verdadera tasa de cambio de un tensor sin dejarse engañar por la curvatura del sistema de coordenadas". \(\nabla^\mu\) es la abreviatura de \(g^{\mu\alpha}\nabla_\alpha\), es decir, la derivada covariante con el índice subido mediante la métrica. El significado concreto de \(\nabla^\mu G_{\mu\nu} = 0\) es: como \(\mu\) aparece arriba en \(\nabla^\mu\) y abajo en \(G_{\mu\nu}\) con la misma letra, por la convención de suma de Einstein se suma para \(\mu = 0, 1, 2, 3\). Es decir, \(\nabla^0 G_{0\nu} + \nabla^1 G_{1\nu} + \nabla^2 G_{2\nu} + \nabla^3 G_{3\nu} = 0\) se cumple para cada \(\nu\) — esto es lo que significa "la divergencia covariante es cero".
🔵 Kai: Es algo como la "divergencia" normal, pero con correcciones para el espaciotiempo curvo, ¿no?
🟡 Lina: Exacto. Si haces lo mismo con la derivada parcial ordinaria \(\partial^\mu\) obtienes la "divergencia ordinaria", pero \(\nabla^\mu\) incluye correcciones con los símbolos de Christoffel, así que es "la divergencia correcta incluso en espaciotiempo curvo". La estructura tiene la misma forma de suma, pero el contenido de cada término es un poco más complejo que con derivadas parciales — esa es la única diferencia. Esta identidad es consistente con la ley de conservación de la energía \(\nabla^\mu T_{\mu\nu} = 0\) del lado derecho, haciendo que la ecuación sea consistente. Es decir, la distribución de materia del lado derecho determina la curvatura del lado izquierdo, y a su vez esa curvatura determina el movimiento de la materia a través de las geodésicas. En palabras de la famosa frase de Wheeler: "La materia le dice al espaciotiempo cómo curvarse, y el espaciotiempo le dice a la materia cómo moverse" ('Matter tells spacetime how to curve, and spacetime tells matter how to move').
⚪ Mei: La ley de conservación de la energía y la identidad geométrica son automáticamente consistentes — por eso el tensor de Einstein es el apropiado para el lado izquierdo de la ecuación.
D.1.6 Base ortonormal (tétrada)¶
🟡 Lina: Antes de nada, voy a explicar la razón de introducir una "base ortonormal". Las componentes del tensor de Riemann o del tensor de Einstein escritas en la base de coordenadas dependen de la elección de coordenadas y llevan factores complicados. Pero si las escribimos en una base ortonormal, cada componente corresponde directamente a cantidades físicas locales (magnitud de las fuerzas de marea, densidad de energía, presión, etc.). Por eso en este formulario hay muchos lugares donde las cantidades de curvatura se dan en componentes de base ortonormal.
🟡 Lina: Recuerda que el tensor métrico \(g_{\alpha\beta}\) era la herramienta para calcular el producto interno de dos vectores. Es la generalización del producto escalar de vectores que aprendiste en el bachillerato \(\mathbf{u} \cdot \mathbf{v} = u_x v_x + u_y v_y + u_z v_z\), y en espaciotiempo curvo se escribe como \(g(\mathbf{u}, \mathbf{v}) = g_{\alpha\beta}u^\alpha v^\beta\) (como los mismos índices \(\alpha\), \(\beta\) aparecen arriba y abajo, se suma para cada uno de 0 a 3 — la convención de suma de Einstein). En el espacio plano, \(g_{\alpha\beta}\) se convierte en la matriz identidad y recuperamos la fórmula del producto escalar del bachillerato. Aquí introduzco los "índices con sombrero" \(\hat{\alpha}\). Son un símbolo que indica que se trata de índices de la base ortonormal, para distinguirlos de los índices de la base de coordenadas \(\alpha\). Cuando la base \(\mathbf{e}_{\hat{\alpha}}\) representada con índices con sombrero \(\hat{\alpha}\) satisface
— es decir, cuando el producto interno entre vectores base es la métrica de Minkowski \(\eta_{\hat{\alpha}\hat{\beta}} = \mathrm{diag}(-1,+1,+1,+1)\) — llamamos a esta base "base ortonormal". Corresponde a la base del "ascensor en caída libre" donde localmente se cumple la relatividad especial. Para una métrica diagonal \(ds^2 = g_{00}(dx^0)^2 + g_{11}(dx^1)^2 + \cdots\), cada vector base se obtiene simplemente tomando el inverso de la raíz cuadrada del valor absoluto de la componente métrica. Aquí, la notación \((\mathbf{e}_{\hat{\alpha}})^\mu\) significa "la componente en la dirección \(\mu\) del vector base \(\mathbf{e}_{\hat{\alpha}}\) en coordenadas". Para una métrica diagonal, el \(\hat{\alpha}\)-ésimo vector base ortonormal tiene componente solo en la misma dirección coordenada que \(\hat{\alpha}\). Te muestro un ejemplo concreto primero. Si \(\hat{\alpha} = \hat{r}\), el vector base \(\mathbf{e}_{\hat{r}}\) tiene componente solo en la dirección \(r\), y su valor es \(1/\sqrt{|g_{rr}|}\). Las componentes en las otras direcciones (\(t\), \(\theta\), \(\varphi\)) son todas cero. Escribiéndolo de forma general: \((\mathbf{e}_{\hat{\alpha}})^\mu = \delta^\mu_\alpha / \sqrt{|g_{\alpha\alpha}|}\). Aquí \(\delta^\mu_\alpha\) se llama delta de Kronecker, un símbolo que vale 1 cuando \(\mu = \alpha\) y 0 cuando \(\mu \neq \alpha\). Es decir, expresa matemáticamente que "solo tiene componente en la dirección \(\alpha\)". Una precaución: el \(\alpha\) en esta fórmula es una etiqueta fija que indica "la dirección coordenada correspondiente a \(\hat{\alpha}\)", y no es un índice sobre el que se suma por la convención de Einstein. Normalmente, cuando la misma letra aparece arriba y abajo se suma, pero aquí solo se especifica una dirección para cada \(\hat{\alpha}\), como "la dirección correspondiente a \(\hat{r}\) es \(r\)". Te doy un truco para distinguirlo: \(\delta^\mu_\alpha\) es una tabla de valores que da "1 si \(\mu = \alpha\), 0 si \(\mu \neq \alpha\)", y no es una instrucción de sumar sobre \(\alpha\). El \(\alpha\) aquí es una etiqueta fija que especifica "de qué vector base ortonormal estamos hablando" — por ejemplo, si escribimos la base de \(\hat{r}\), fijamos \(\alpha = r\) y solo \(\mu\) recorre \(t, r, \theta, \varphi\). Como resultado, solo la componente \(\mu = r\) es \(1/\sqrt{|g_{rr}|}\) y el resto son cero. En la práctica, sin necesidad de memorizar la fórmula general, basta recordar que "el vector base en la dirección \(\hat{\alpha}\) tiene componente \(1/\sqrt{|g_{\alpha\alpha}|}\) en la dirección coordenada correspondiente". Escribiéndolo todo explícitamente: para \(\hat{t}\) es \(1/\sqrt{|g_{tt}|}\) en la dirección \(t\), para \(\hat{r}\) es \(1/\sqrt{g_{rr}}\) en la dirección \(r\), para \(\hat{\theta}\) es \(1/\sqrt{g_{\theta\theta}}\) en la dirección \(\theta\), para \(\hat{\varphi}\) es \(1/\sqrt{g_{\varphi\varphi}}\) en la dirección \(\varphi\) — eso es todo.
Y cuando transformamos las componentes de un tensor a la base ortonormal, usamos las componentes de los vectores base: \(T_{\hat{\alpha}\hat{\beta}} = (\mathbf{e}_{\hat{\alpha}})^\mu (\mathbf{e}_{\hat{\beta}})^\nu T_{\mu\nu}\). Para una métrica diagonal, esto se reduce simplemente a "dividir por \(\sqrt{|g_{\alpha\alpha}|}\) para cada índice" — porque la componente del vector base es \(1/\sqrt{|g_{\alpha\alpha}|}\). Esta regla de transformación se usará concretamente en D.3.3.
🔵 Kai: Me cuesta un poco imaginarlo. ¿Multiplicar por las componentes del vector base es básicamente "normalizar el tamaño de las marcas de la base de coordenadas"?
🟡 Lina: Sí, buena forma de expresarlo. La base de coordenadas tiene "una longitud de marca" que varía según el lugar, ¿verdad? La base ortonormal iguala esa longitud a 1, así que cuando transformas las componentes de un tensor, divides por "el tamaño de la marca" — eso corresponde a la operación de multiplicar por \(1/\sqrt{|g_{\alpha\alpha}|}\). Veamos cómo queda concretamente.
🟡 Lina: Por ejemplo, en el espaciotiempo de Schwarzschild con \(g_{rr} = (1-2M/r)^{-1}\), tenemos \(|g_{rr}|^{1/2} = (1-2M/r)^{-1/2}\), y su inverso \((1-2M/r)^{1/2}\) es la componente \(r\) del vector base en la dirección \(\hat{r}\). En D.2.3 están listadas todas las componentes, así que confírmalo allí.
⚪ Mei: Es decir, en cualquier espaciotiempo curvo, siempre se puede encontrar una base que localmente se ve como la métrica de Minkowski \(\eta_{\hat{\alpha}\hat{\beta}}\) de la relatividad especial.
✅ Verificación de comprensión: ¿Por qué el número de componentes independientes del tensor de curvatura de Riemann se reduce a 20 en un espaciotiempo de 4 dimensiones?
Respuesta
El tensor de Riemann tiene múltiples simetrías. La antisimetría en el 1.° y 2.° índices, la antisimetría en el 3.° y 4.° índices, la simetría de intercambio de los pares primera y segunda mitad, y la primera identidad de Bianchi (la suma cíclica sobre los índices 2.°–4.° es cero). Debido a estas restricciones, de las \(256\) componentes originales solo 20 son independientes.
D.2 Espaciotiempo de Schwarzschild¶
🟡 Lina: El espaciotiempo de vacío alrededor de una masa esféricamente simétrica sin rotación \(M\). El movimiento planetario del sistema solar, la deflexión de la luz, el modelo de agujero negro más básico — todo se deriva de aquí. Mira la Fig. D.2「Relación masa-radio de objetos astronómicos y radio de Schwarzschild」. Se comparan en un gráfico log-log la masa y el radio de diversos objetos astronómicos, desde la Tierra hasta el agujero negro del centro galáctico (Sgr A*). La línea negra es el radio de Schwarzschild, que en unidades geométricas (\(G = c = 1\), ver D.6 para detalles) es \(r_s = 2M\), y en SI es \(r_s = 2GM/c^2\). Cuando el radio de un objeto astronómico es menor que esto, se convierte en un agujero negro. Si miras la figura, las estrellas de neutrones están justo encima de la línea negra, con un margen de solo unas pocas veces el radio de Schwarzschild — es decir, la compacidad \(GM/(Rc^2)\) (una cantidad adimensional que mide cuán cerca está el radio \(R\) del objeto del radio de Schwarzschild \(2GM/c^2\), ver Cap. 18) es muy alta, como se puede ver de un vistazo.
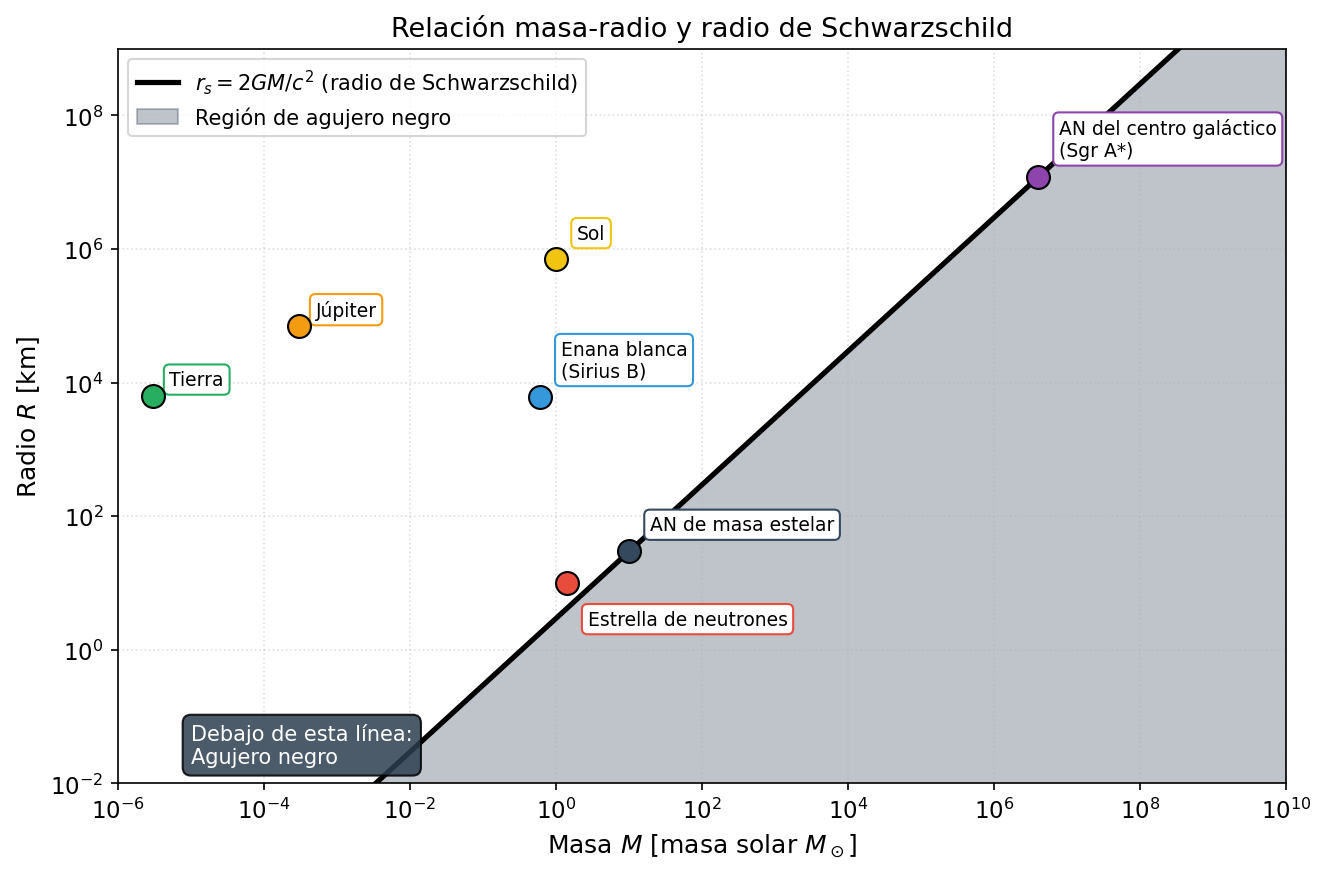
Fig. D.2: Relación masa-radio de objetos astronómicos y radio de Schwarzschild. Relación masa-radio de objetos astronómicos y radio de Schwarzschild \(r_s = 2GM/c^2\) (en unidades geométricas \(r_s = 2M\)). Se comparan en gráfico log-log la Tierra, Júpiter, el Sol, enanas blancas, estrellas de neutrones, agujeros negros de masa estelar y el agujero negro del centro galáctico (Sgr A). La región por debajo de la línea negra (\(R < r_s\)) corresponde a agujeros negros.*
D.2.1 Métrica¶
🔵 Kai: En \(r = 2M\), \(g_{tt} = 0\) y \(g_{rr}\) diverge. ¿Eso significa que realmente hay una "pared" ahí?
🟡 Lina: Buena pregunta. \(r = 2M\) es el horizonte de eventos, pero es solo una singularidad coordenada. El tensor de Riemann es finito allí, así que físicamente no ocurre nada especial. La singularidad real está en \(r = 0\).
✅ Verificación de comprensión: En el espaciotiempo de Schwarzschild, ¿cuál es la diferencia entre las singularidades en \(r = 2M\) y \(r = 0\)?
Respuesta
\(r = 2M\) es una singularidad coordenada que puede eliminarse mediante una transformación de coordenadas apropiada. De hecho, el tensor de Riemann toma valores finitos allí. En cambio, \(r = 0\) es una singularidad real (física), donde los invariantes de curvatura (por ejemplo, el escalar de Kretschner \(R_{\alpha\beta\gamma\delta}R^{\alpha\beta\gamma\delta}\)) divergen.
D.2.2 Símbolos de Christoffel (componentes no nulas)¶
⚪ Mei: Por la simetría en los índices inferiores, también se obtienen \(\Gamma^t{}_{rt} = \Gamma^t{}_{tr}\), \(\Gamma^\theta{}_{\theta r} = \Gamma^\theta{}_{r\theta}\), etc.
🟡 Lina: Mira \(\Gamma^r{}_{tt}\). A grandes distancias \(r \gg 2M\), como \((1 - 2M/r) \approx 1\), tenemos \(\Gamma^r{}_{tt} \approx M/r^2\). Esto es exactamente la aceleración de la gravedad de Newton \(GM/r^2\) (con \(G = 1\)). Si lo sustituyes en la ecuación de las geodésicas, se reproduce la ecuación de movimiento de Newton.
📝 Ejercicios:
- Derivación de \(\Gamma^r{}_{tt}\) → Problema B-1. \(\Gamma^r_{\ tt}\) de Schwarzschild, derivación de \(\Gamma^r{}_{rr}\) → Problema B-2. \(\Gamma^r_{\ rr}\) de Schwarzschild, verificación de la base ortonormal → Problema B-6. Verificación de la base ortonormal de Schwarzschild, correspondencia con la métrica esféricamente simétrica general → Problema B-7. Verificación de Christoffel para simetría esférica general
D.2.3 Base ortonormal¶
🔵 Kai: Como \(g_{tt} = -(1-2M/r)\), tenemos \(|g_{tt}|^{1/2} = (1-2M/r)^{1/2}\). Su inverso es la componente \(t\) del vector base en la dirección \(\hat{t}\). ...Pero espera, ¿en \(r = 2M\) \((1-2M/r)^{-1/2}\) diverge? ¿Ya no se puede construir la base ortonormal?
🟡 Lina: Muy astuto. La base ortonormal basada en la coordenada \(t\) efectivamente se rompe en \(r = 2M\). Esto es un reflejo de la singularidad coordenada, y para cruzar el horizonte es necesario cambiar a otro sistema de coordenadas (por ejemplo, uno que use el tiempo propio de un observador en caída libre).
D.2.4 Curvatura de Riemann (componentes en base ortonormal)¶
🟡 Lina: Estas son todas las componentes no nulas independientes — 6 en total (en un espaciotiempo general de 4 dimensiones serían como máximo 20, pero la simetría esférica impone fuertes restricciones). Además, gracias a la simetría esférica, las direcciones \(\theta\) y \(\varphi\) son equivalentes, por lo que hay pares conectados por signos de igualdad en las ecuaciones de arriba. En cuanto a "valores" independientes, en realidad solo hay 4 tipos (\(\pm 2M/r^3\) y \(\pm M/r^3\)). Las demás componentes no nulas se determinan por simetría. Por ejemplo, \(R_{\hat{t}\hat{r}\hat{r}\hat{t}}\) por la antisimetría en el 1.° y 2.° índices da \(R_{\hat{t}\hat{r}\hat{r}\hat{t}} = -R_{\hat{r}\hat{t}\hat{r}\hat{t}} = 2M/r^3\). Además, las componentes que mezclan diferentes direcciones angulares (por ejemplo \(R_{\hat{t}\hat{\theta}\hat{r}\hat{\varphi}}\)) son cero por la simetría esférica. Intuitivamente, en un espaciotiempo esféricamente simétrico las direcciones \(\theta\) y \(\varphi\) son "equivalentes", así que no hay razón para que una se acople especialmente con la otra — por eso las componentes mixtas deben ser cero. Todo es proporcional a \(M/r^3\) como escala básica, con coeficientes que son solo \(\pm 1\) o \(\pm 2\). La misma dependencia \(r^{-3}\) que la fuerza de marea newtoniana.
🔵 Kai: Todo es proporcional a \(r^{-3}\). Entonces, ¿qué magnitud tiene en \(r = 2M\) (el horizonte)?
🟡 Lina: Por ejemplo, sustituyendo \(r = 2M\) en \(R_{\hat{\theta}\hat{t}\hat{\theta}\hat{t}} = M/r^3\) obtenemos \(1/(8M^2)\), que es finito. Cuanto mayor sea \(M\) en un agujero negro supermasivo, más débil es la fuerza de marea en el horizonte. Pero en \(r = 0\) diverge — esa es la singularidad real.
⚪ Mei: \(1/(8M^2)\), así que si \(M\) se multiplica por 10, la fuerza de marea se reduce a 1/100. Entiendo bien por qué el horizonte de un agujero negro supermasivo es "tranquilo".
🔵 Kai: A grandes distancias \(r \to \infty\) todas las componentes tienden a cero. ¿Eso significa que lejos se vuelve un espaciotiempo plano?
🟡 Lina: Exacto. Eso se llama planitud asintótica (asymptotic flatness). Es la propiedad que se espera del espaciotiempo alrededor de un objeto aislado. Por cierto, aunque el tensor de Riemann es no nulo, el tensor de Ricci tiene todas sus componentes iguales a cero. Como es vacío, \(R_{\mu\nu} = 0\).
🔵 Kai: ¿\(R_{\mu\nu} = 0\) y \(G_{\mu\nu} = 0\) de D.2.5 son lo mismo?
🟡 Lina: Sí, en 4 dimensiones son equivalentes. Si contraemos (tomamos la traza de) ambos lados de \(G_{\mu\nu} = R_{\mu\nu} - \frac{1}{2}g_{\mu\nu}R\) multiplicando por \(g^{\mu\nu}\), usando \(g^{\mu\nu}R_{\mu\nu} = R\) (que es la propia definición de \(R\)) y \(g^{\mu\nu}g_{\mu\nu} = \delta^\mu{}_\mu = 4\) (\(\delta^\mu{}_\mu\) es la suma de cuatro unos para \(\mu = 0,1,2,3\), así que da 4), obtenemos \(g^{\mu\nu}G_{\mu\nu} = R - \frac{1}{2} \cdot 4 \cdot R = R - 2R = -R\). Así que si \(G_{\mu\nu} = 0\), de la traza se obtiene \(R = 0\). Sustituyendo esto en \(G_{\mu\nu} = R_{\mu\nu} - \frac{1}{2}g_{\mu\nu}R = 0\) se sigue \(R_{\mu\nu} = 0\). A la inversa, si \(R_{\mu\nu} = 0\) entonces \(R = g^{\mu\nu}R_{\mu\nu} = 0\) y por tanto \(G_{\mu\nu} = R_{\mu\nu} = 0\). Verifica esto en los ejercicios.
⚪ Mei: Tomando la traza se obtiene la relación entre \(R\) y \(G\), y sustituyendo de vuelta en la ecuación original se demuestra la equivalencia. Un argumento elegante.
🔵 Kai: Hmm... entiendo que en el vacío \(R_{\mu\nu} = 0\) y \(G_{\mu\nu} = 0\) son lo mismo. Pero el tensor de Riemann es no nulo, ¿verdad? O sea que "curvatura cero" y "Ricci cero" son cosas completamente diferentes. Entonces, al revés, ¿cuando hay materia \(R_{\mu\nu} = 0\) y \(G_{\mu\nu} = 0\) ya no son equivalentes?
🟡 Lina: Buena pregunta. Cuando hay materia, \(G_{\mu\nu} = 8\pi T_{\mu\nu} \neq 0\), así que ninguno de los dos es cero para empezar. Pero la relación "\(R_{\mu\nu} = 0\) es equivalente a \(G_{\mu\nu} = 0\)" es en sí misma un hecho matemático que se cumple independientemente de si el lado derecho es cero o no. Y como acabamos de confirmar, incluso en el vacío (\(R_{\mu\nu} = 0\)) el tensor de Riemann es no nulo — es decir, "el espaciotiempo puede curvarse incluso sin materia", lo cual es lo interesante de la relatividad general.
✅ Verificación de comprensión: Los símbolos de Christoffel y el tensor de Riemann del espaciotiempo de Schwarzschild, ¿a partir de qué se calculan mecánicamente?
Respuesta
Se calculan mecánicamente a partir del tensor métrico \(g_{\mu\nu}\) y sus derivadas parciales. Los símbolos de Christoffel se construyen con las derivadas de primer orden de la métrica, y el tensor de Riemann con las derivadas de primer orden de los símbolos de Christoffel y productos de segundo orden.
📝 Ejercicios:
- Aplicación de las simetrías del tensor de Riemann → Problema B-8. Aplicación de las simetrías del tensor de Riemann, verificación de \(R_{\hat{t}\hat{t}} = 0\) del tensor de Ricci → Problema B-9. \(R_{tt} = 0\) de Schwarzschild, cálculo del escalar de Kretschmann → Problema M-3. Escalar de Kretschmann de Schwarzschild, ecuación de geodésicas y límite newtoniano → Problema M-1. Límite newtoniano de la geodésica de Schwarzschild, órbitas circulares y fuerza de marea → Problema A-1. Órbita circular de Schwarzschild y fuerzas de marea
D.2.5 Ecuación de Einstein¶
🟡 Lina: Solución de vacío. Es la solución de la ecuación en una región sin materia. La masa \(M\) entra en la métrica como condición de contorno.
D.3 Espaciotiempo esféricamente simétrico general¶
🟡 Lina: Un espaciotiempo esféricamente simétrico más general que también permite dependencia temporal. Describe el colapso gravitatorio de estrellas y el proceso de formación de agujeros negros.
D.3.1 Métrica¶
🔵 Kai: ¿Por qué se escribe con exponenciales como \(e^{\nu}\)? ¿No valdría simplemente \(f(r,t)\)?
🟡 Lina: Buena pregunta. Como confirmamos en D.1.1, nuestra convención de signos es \((-,+,+,+)\) — es decir, en la expresión de \(ds^2\) va un signo menos en la dirección temporal y un signo más en las direcciones espaciales. Así que \(g_{tt}\) debe ser negativo y \(g_{rr}\) positivo. Si escribimos \(g_{tt} = -e^{\nu}\) y \(g_{rr} = e^{\lambda}\), independientemente del valor real que tomen \(\nu\) y \(\lambda\), se garantiza que \(e^{\nu} > 0\) y \(e^{\lambda} > 0\), y los signos se mantienen automáticamente correctos. Además, los símbolos de Christoffel contienen derivadas de la métrica, ¿verdad? Si derivamos \(g_{rr} = e^{\lambda}\) obtenemos \(\partial_r g_{rr} = \lambda' e^{\lambda}\), y al multiplicar por \(g^{rr} = e^{-\lambda}\), el \(e^{\lambda}\) se cancela y solo queda \(\lambda'\). Así que las expresiones de los símbolos de Christoffel quedan más limpias. Por cierto, la solución de Schwarzschild es el caso especial \(e^{\nu} = e^{-\lambda} = 1 - 2M/r\) (independiente del tiempo). Es decir, \(\nu = -\lambda\) y además es función solo de \(r\).
⚪ Mei: En el caso general \(\nu\) y \(\lambda\) son funciones independientes, pero en Schwarzschild entra esa restricción.
D.3.2 Símbolos de Christoffel (componentes no nulas)¶
El punto \(\dot{}\) representa \(\partial/\partial t\) y la prima \('\) representa \(\partial/\partial r\).
🔵 Kai: ¿Se puede comparar esto con el caso de Schwarzschild? Si pongo \(\dot{\nu} = \dot{\lambda} = 0\) y sustituyo \(e^{\nu} = 1 - 2M/r\), etc., ¿coincide con D.2.2?
🟡 Lina: Exacto. Veamos una sustitución concreta. Por ejemplo, sustituyamos los valores de Schwarzschild en \(\Gamma^r{}_{tt} = (\nu'/2)\,e^{\nu - \lambda}\). Como \(e^\nu = 1-2M/r\), tenemos \(\nu = \ln(1-2M/r)\), y derivando respecto a \(r\): \(\nu' = \frac{2M/r^2}{1-2M/r}\). También \(e^{\nu-\lambda} = e^\nu \cdot e^{-\lambda} = (1-2M/r)(1-2M/r) = (1-2M/r)^2\). Sustituyendo: \(\frac{\nu'}{2}e^{\nu-\lambda} = \frac{M/r^2}{1-2M/r} \cdot (1-2M/r)^2 = \frac{M}{r^2}(1-2M/r)\). Coincide con D.2.2. También puedes verificar más adelante que sustituyendo los valores de Schwarzschild en las fórmulas del tensor de Einstein de D.3.3 se obtiene \(G_{\hat{t}\hat{t}} = 0\) — pruébalo como ejercicio.
D.3.3 Tensor de Einstein (componentes en base ortonormal)¶
A continuación se muestran las componentes diagonales para el caso en que se puede ignorar la dependencia temporal (\(\dot{\nu} = \dot{\lambda} = 0\)). En el caso general con dependencia temporal aparecen términos adicionales con \(\dot{\lambda}\), \(\dot{\nu}\), pero aquí nos limitamos a las componentes más importantes para la estructura interna de estrellas estáticas.
🔵 Kai: ¿Se puede verificar que esto da \(0\) para Schwarzschild?
🟡 Lina: Hagámoslo. Sustituimos \(e^{-\lambda} = 1-2M/r\), \(e^\lambda = (1-2M/r)^{-1}\), \(\nu' = \frac{2M/r^2}{1-2M/r}\). Entonces \(\nu' r = \frac{2M/r}{1-2M/r}\). Pongamos un denominador común \((1-2M/r)\) para los 3 términos dentro del paréntesis de \(G_{\hat{r}\hat{r}}\):
Desarrollando el numerador: \(2M/r + 1 - 2M/r - 1 = 0\). Así que todo el paréntesis es cero y \(G_{\hat{r}\hat{r}} = 0\). Consistente con la solución de vacío.
⚪ Mei: Se cancela limpiamente. Me gustaría verificar también \(G_{\hat{t}\hat{t}}\).
🟡 Lina: De manera similar, verifiquemos \(G_{\hat{t}\hat{t}}\). En Schwarzschild, \(\nu = -\lambda\), así que derivando ambos lados respecto a \(r\): \(\nu' = -\lambda'\), es decir \(\lambda' = -\nu' = -\frac{2M/r^2}{1-2M/r}\). Sustituyendo \(r\lambda' = -\frac{2M/r}{1-2M/r}\) en el paréntesis de \(G_{\hat{t}\hat{t}}\): \(-\frac{2M/r}{1-2M/r} - 1 + \frac{1}{1-2M/r} = \frac{-2M/r - (1-2M/r) + 1}{1-2M/r} = \frac{-2M/r - 1 + 2M/r + 1}{1-2M/r} = 0\), confirmando que \(G_{\hat{t}\hat{t}} = 0\).
🔵 Kai: ¡Genial, este también da cero limpiamente!
🟡 Lina: También incluyo una componente no diagonal que es no nula cuando hay dependencia temporal. Usando los símbolos de Christoffel de D.3.2 para calcular el tensor de Ricci y construir el tensor de Einstein, el resultado en la base de coordenadas es \(G_{tr} = \dot{\lambda}/r\) (la derivación es larga así que solo doy el resultado). Transformemos esto a la base ortonormal. Recuerda la regla de transformación de D.1.6: \(T_{\hat{\alpha}\hat{\beta}} = (\mathbf{e}_{\hat{\alpha}})^\mu (\mathbf{e}_{\hat{\beta}})^\nu T_{\mu\nu}\). Para una métrica diagonal, los vectores base solo tienen componente en una dirección, así que esto se reduce simplemente a dividir por \(\sqrt{|g_{\alpha\alpha}|}\) para cada índice: \(T_{\hat{\alpha}\hat{\beta}} = T_{\alpha\beta}/(\sqrt{|g_{\alpha\alpha}|}\sqrt{|g_{\beta\beta}|})\). Aquí \(\alpha = t\), \(\beta = r\), así que dividimos por \(\sqrt{|g_{tt}|} = e^{\nu/2}\) y \(\sqrt{g_{rr}} = e^{\lambda/2}\). Es decir, \(G_{\hat{t}\hat{r}} = G_{tr}/(e^{\nu/2} \cdot e^{\lambda/2}) = (\dot{\lambda}/r) \cdot e^{-(\nu + \lambda)/2}\):
Esto corresponde al flujo de energía (flujo de calor, etc.). En el caso estático (\(\dot{\lambda} = 0\)) esta componente es cero, consistente con la ausencia de flujo de energía.
🔵 Kai: ¿No incluyes la componente angular \(G_{\hat{\theta}\hat{\theta}}\)?
🟡 Lina: La omití porque la fórmula se hace larga, pero físicamente corresponde a la presión tangencial \(p_\perp\). Se puede calcular a partir de los símbolos de Christoffel cuando sea necesario.
🟡 Lina: Resumo el significado físico de las 3 componentes que he incluido aquí. Como aprendimos en el capítulo 14 del texto principal, colocando el tensor de energía-momento en el lado derecho de la ecuación de Einstein \(G_{\hat{\alpha}\hat{\beta}} = 8\pi T_{\hat{\alpha}\hat{\beta}}\): \(G_{\hat{t}\hat{t}} = 8\pi \rho\) (\(\rho\) es la densidad de energía), \(G_{\hat{r}\hat{r}} = 8\pi p_r\) (\(p_r\) es la presión radial).
🔵 Kai: \(\rho\) es la densidad de energía y \(p_r\) es la presión... es decir, cada componente del tensor de Einstein corresponde uno a uno con cantidades físicas del fluido.
🟡 Lina: Exacto. Para un fluido perfecto (un fluido ideal sin viscosidad ni conducción térmica, caracterizado solo por una presión isótropa \(p\) — ver capítulo 14), \(p_r = p_\perp = p\). Es decir, la presión es la misma en la dirección radial y en la dirección tangencial. De forma más general, se pueden considerar fluidos con presión anisótropa, en cuyo caso \(p_r \neq p_\perp\). \(\rho\) es la energía por unidad de volumen del fluido, \(p_r\) es la fuerza por unidad de área que empuja una superficie en la dirección radial.
🔵 Kai: En la transformación de la componente no diagonal \(G_{\hat{t}\hat{r}}\) de antes, ¿por qué se puede usar la misma regla de "dividir por \(\sqrt{|g_{\alpha\alpha}|}\)" que para las componentes diagonales? ¿La misma regla funciona también para componentes no diagonales?
🟡 Lina: Buena pregunta. La regla de transformación \(T_{\hat{\alpha}\hat{\beta}} = (\mathbf{e}_{\hat{\alpha}})^\mu (\mathbf{e}_{\hat{\beta}})^\nu T_{\mu\nu}\) de D.1.6 es una fórmula general que vale tanto para componentes diagonales como no diagonales. Para una métrica diagonal, los vectores base solo tienen componente en una dirección, así que incluso para la combinación \(\hat{t}\) y \(\hat{r}\), solo sobrevive el término \((\mathbf{e}_{\hat{t}})^t (\mathbf{e}_{\hat{r}})^r T_{tr}\). El resultado es \(G_{\hat{t}\hat{r}} = (1/\sqrt{|g_{tt}|})(1/\sqrt{g_{rr}}) \cdot G_{tr}\). Se usa exactamente la misma regla que para las componentes diagonales, solo cambia la combinación de índices.
🔵 Kai: Entiendo, como la métrica es diagonal no hay términos que se mezclen.
🟡 Lina: Por otro lado, la componente no diagonal \(G_{\hat{t}\hat{r}} = 8\pi q\) (\(q\) es la densidad de flujo de energía, es decir, la energía que fluye por unidad de área y unidad de tiempo) es no nula para fluidos imperfectos con conducción térmica, etc.
⚪ Mei: Las componentes diagonales son "la energía y presión presentes en ese punto", las componentes no diagonales son "el flujo de energía". Para una estrella estática no hay flujo así que las componentes no diagonales son cero — consistente con la condición \(\dot{\lambda} = 0\) de antes.
🟡 Lina: Resumen perfecto. Las ecuaciones de estructura interna estelar se derivan de estas. En particular, integrando \(G_{\hat{t}\hat{t}} = 8\pi\rho\) se define la "función de masa" \(m(r) = 4\pi\int_0^r \rho(r')\,r'^2\,dr'\), que representa la energía (masa) contenida dentro del radio \(r\). @exercise: Derivación de la función de masa \(m(r)\) → Problema M-4. Derivación de la función de masa
D.4 Modelo cosmológico de Friedmann-Robertson-Walker (FRW)¶
🟡 Lina: La métrica que describe un universo homogéneo e isótropo. Es el modelo básico de la cosmología.
D.4.1 Métrica¶
🟡 Lina: \(a(t)\) es el factor de escala (scale factor) que representa la variación temporal del tamaño del universo, y \(k = +1, 0, -1\) es el parámetro de curvatura espacial.
🔵 Kai: Los valores de \(k\) cambian la forma del universo, ¿verdad?
🟡 Lina: Sí. \(k = +1\) es un universo cerrado (esférico), \(k = 0\) es plano, \(k = -1\) es un universo abierto (hiperbólico).
✅ Verificación de comprensión: ¿Qué representan respectivamente los parámetros \(a(t)\) y \(k\) de la métrica FRW?
Respuesta
\(a(t)\) es el factor de escala y representa cómo cambia el tamaño espacial del universo con el tiempo. \(k\) es el parámetro de curvatura espacial: \(k = +1\) corresponde a un universo cerrado (esférico), \(k = 0\) a un universo plano, y \(k = -1\) a un universo abierto (hiperbólico).
D.4.2 Símbolos de Christoffel (componentes no nulas)¶
El punto \(\dot{}\) representa \(\partial/\partial t\).
🔵 Kai: \(\Gamma^r{}_{tr}\), \(\Gamma^\theta{}_{t\theta}\), \(\Gamma^\varphi{}_{t\varphi}\) son todos \(\dot{a}/a\). ¡Eso es exactamente el parámetro de Hubble \(H\) que apareció en el texto principal!
🟡 Lina: Exacto. \(H = \dot{a}/a\) es la tasa de expansión del universo. Que \(H\) aparezca en los símbolos de Christoffel de las direcciones espaciales refleja el significado geométrico de "ir en línea recta" en un universo en expansión.
✅ Verificación de comprensión: ¿Cuál es el significado físico de que los símbolos de Christoffel \(\Gamma^r{}_{tr}\), \(\Gamma^\theta{}_{t\theta}\), \(\Gamma^\varphi{}_{t\varphi}\) del espaciotiempo FRW sean todos iguales a \(\dot{a}/a\)?
Respuesta
\(\dot{a}/a\) es el propio parámetro de Hubble \(H\), que representa la tasa de expansión del universo. Que esta cantidad aparezca en los símbolos de Christoffel de las direcciones espaciales refleja geométricamente que "seguir una geodésica en línea recta" en un universo en expansión se ve afectado por el efecto de la expansión.
D.4.3 Tensor de Einstein (componentes en base ortonormal)¶
🟡 Lina: Sustituyendo un fluido perfecto \(T_{\hat{\alpha}\hat{\beta}} = \mathrm{diag}(\rho, p, p, p)\) en la ecuación de Einstein \(G_{\hat{\alpha}\hat{\beta}} = 8\pi T_{\hat{\alpha}\hat{\beta}}\), se obtienen las ecuaciones de Friedmann. La primera ecuación se obtiene directamente de la componente \(\hat{t}\hat{t}\): \(G_{\hat{t}\hat{t}} = 8\pi\rho\), es decir \(3(\dot{a}^2 + k)/a^2 = 8\pi\rho\); dividiendo por \(3\) se obtiene la primera ecuación de Friedmann.
🔵 Kai: Entonces, ¿la segunda ecuación sale de la componente espacial \(G_{\hat{r}\hat{r}} = 8\pi p\)?
🟡 Lina: Exacto. Reordenando la primera ecuación de Friedmann \((\dot{a}/a)^2 = 8\pi\rho/3 - k/a^2\) se obtiene \((\dot{a}^2 + k)/a^2 = 8\pi\rho/3\). Sustituyendo esto en \(-(2\ddot{a}/a) - (\dot{a}^2 + k)/a^2 = 8\pi p\) para eliminar \((\dot{a}^2 + k)/a^2\): \(-2\ddot{a}/a - 8\pi\rho/3 = 8\pi p\). Pasando \(8\pi\rho/3\) al lado derecho y reorganizando: \(-2\ddot{a}/a = 8\pi p + 8\pi\rho/3\).
⚪ Mei: Combinando el lado derecho se obtiene la forma \(\frac{8\pi}{3}(\rho + 3p)\).
🟡 Lina: Exacto. Factorizando \(8\pi\) en el lado derecho: \(8\pi(p + \rho/3) = \frac{8\pi}{3}(\rho + 3p)\). Así que \(-2\ddot{a}/a = \frac{8\pi}{3}(\rho + 3p)\). Dividiendo ambos lados por \(-2\): \(\ddot{a}/a = -\frac{4\pi}{3}(\rho + 3p)\). En resumen:
🔵 Kai: ¡Es la primera vez que puedo seguir completamente cómo las ecuaciones de Friedmann salen del tensor de Einstein!
🟡 Lina: Para incluir la constante cosmológica \(\Lambda\), se trata \(\Lambda/(8\pi)\) como una densidad de energía efectiva y se añade un término \(\Lambda/3\) al lado derecho de la primera ecuación (ver Cap. 21). Entonces la primera ecuación se convierte en \(H^2 = 8\pi\rho/3 - k/a^2 + \Lambda/3\) (donde \(\rho\) es la densidad de energía de materia y radiación).
🔵 Kai: La primera ecuación determina la velocidad de expansión y la segunda determina la aceleración o deceleración, ¿verdad? Pero mirando la segunda ecuación... \(\rho + 3p\), ¿por qué no solo entra la densidad sino también la presión? ¡Y encima multiplicada por 3! En la mecánica newtoniana la fuente de gravedad es solo la masa, ¿no?
🟡 Lina: Buena pregunta. En relatividad general, la presión también es una fuente de gravedad al igual que la energía. El tensor de energía-momento de un fluido perfecto era \(T_{\hat{\alpha}\hat{\beta}} = \mathrm{diag}(\rho, p, p, p)\). Como hay presión \(p\) en cada una de las 3 direcciones \(x\), \(y\), \(z\), en total se añade \(3p\). Como se ve en la ecuación, si \(\rho + 3p > 0\) entonces \(\ddot{a} < 0\) (expansión decelerada), y al revés, si \(\rho + 3p < 0\) entonces hay expansión acelerada.
🔵 Kai: ¿La presión es fuente de gravedad...? Eso es completamente diferente de la mecánica newtoniana. Pero si lo pienso bien, que haya presión significa que las partículas se están moviendo, y la energía cinética también es energía, así que ¿eso también genera gravedad?
🟡 Lina: Intuitivamente es así. Para ser más precisa, la presión representa "el flujo de momento" — es decir, la fuerza con que las partículas empujan una pared. En la mecánica newtoniana solo la masa (energía en reposo) era fuente de gravedad, pero en relatividad general todas las componentes del tensor de energía-momento \(T_{\hat{\alpha}\hat{\beta}}\) son fuentes de gravedad. Las componentes diagonales incluyen tanto la densidad de energía como la presión, ¿ves? Por eso la presión también genera gravedad.
⚪ Mei: Leyendo el signo de la ecuación: el lado derecho tiene un signo menos, así que si \(\rho + 3p\) es positivo, \(\ddot{a}\) es negativo — es decir, deceleración. Para la expansión acelerada se necesita \(\rho + 3p < 0\).
🔵 Kai: \(\rho + 3p < 0\) significa que la presión es negativa, ¿no? ¿Existe algo así?
🟡 Lina: Para ser precisa, que "la presión sea negativa" por sí solo no es suficiente; se necesita \(p < -\rho/3\) — es decir, el valor absoluto de la presión debe ser más de un tercio de la densidad de energía, con signo negativo. El ejemplo representativo es la energía oscura. En el caso de la constante cosmológica, \(p = -\rho\), así que cumple la condición holgadamente. Lo aprendimos en los capítulos 22–23 del texto principal.
🔵 Kai: Ah, la constante cosmológica que apareció antes tenía \(w = -1\), ¿verdad? En aquel momento lo acepté como "así son las cosas", pero... aquí, viendo la estructura de la ecuación, entiendo "por qué la presión negativa genera aceleración". Pero al revés, ¿eso significa que \(w = -1/3\) es exactamente el punto frontera entre aceleración y deceleración?
🟡 Lina: Exacto. \(w = -1/3\) es el punto de bifurcación. Si \(w < -1/3\) hay aceleración, si \(w > -1/3\) hay deceleración. Si entiendes la estructura de la ecuación, la conclusión de que "se necesita presión negativa para la expansión acelerada" no es algo que cae del cielo sino una necesidad.
⚪ Mei: La materia ordinaria (polvo \(w = 0\), radiación \(w = 1/3\)) tiene siempre \(w > -1/3\) así que necesariamente decelera. Para la expansión acelerada realmente se necesita una componente "no ordinaria".
✅ Verificación de comprensión: En la segunda ecuación de Friedmann \(\ddot{a}/a = -4\pi(\rho + 3p)/3\), ¿cuál es la condición para que la expansión del universo se acelere?
Respuesta
Para que \(\ddot{a} > 0\) (expansión acelerada) se necesita \(\rho + 3p < 0\). Con materia ordinaria \(\rho + 3p > 0\) por lo que la expansión se decelera, pero cuando domina una componente que satisface \(p < -\rho/3\), como la energía oscura, se realiza la expansión acelerada.
📝 Ejercicios:
- Símbolos de Christoffel de FRW → Problema B-4. \(\Gamma^r_{\ tr}\) de FRW, Problema B-5. \(\Gamma^t_{\ \theta\theta}\) de FRW, traza del tensor de Einstein y curvatura escalar → Problema B-10. Curvatura escalar de FRW, derivación de las ecuaciones de Friedmann → Problema M-2. FRW y ecuaciones de Friedmann · Ley de conservación, constante cosmológica y espaciotiempo de de Sitter → Problema A-2. de Sitter y la constante cosmológica
D.5 Espaciotiempo plano (espaciotiempo de Minkowski)¶
🟡 Lina: Incluyo también el caso más simple como referencia.
D.5.1 Métrica (coordenadas cartesianas)¶
D.5.2 Métrica (coordenadas esféricas)¶
D.5.3 Símbolos de Christoffel¶
En coordenadas cartesianas todos son cero. En coordenadas esféricas:
🔵 Kai: ¡Es plano pero los símbolos de Christoffel no son cero!
🟡 Lina: Así es. Los símbolos de Christoffel dependen también de la elección del sistema de coordenadas. Si usas coordenadas curvas, serán no nulos incluso en un espacio plano. Para determinar si hay curvatura o no, hay que mirar el tensor de Riemann.
🔵 Kai: O sea que aunque los símbolos de Christoffel sean no nulos, eso no significa que "haya gravedad". ¿Es algo como las fuerzas ficticias?
🟡 Lina: Exactamente eso. La misma estructura que cuando aparecen la fuerza centrífuga y la fuerza de Coriolis en un sistema de coordenadas rotante.
⚪ Mei: Resumiendo, los símbolos de Christoffel contienen tanto "la curvatura del sistema de coordenadas" como "la curvatura del espaciotiempo", y para extraer solo la curvatura real hay que mirar el tensor de Riemann.
✅ Verificación de comprensión: En el espaciotiempo plano de Minkowski, los símbolos de Christoffel son no nulos si se usan coordenadas esféricas. Entonces, ¿qué cantidad hay que mirar para determinar si el espaciotiempo está realmente curvado?
Respuesta
Hay que mirar el tensor de curvatura de Riemann. Como los símbolos de Christoffel dependen de la elección del sistema de coordenadas, que sean no nulos no implica que haya curvatura. Si todas las componentes del tensor de Riemann son cero, el espaciotiempo es plano; si hay componentes no nulas, existe curvatura real (gravedad).
📝 Ejercicios:
- Símbolo de Christoffel en coordenadas esféricas \(\Gamma^\theta{}_{\varphi\varphi}\) → Problema B-3. \(\Gamma^\theta_{\ \varphi\varphi}\) en coordenadas esféricas de Minkowski
D.5.4 Curvatura de Riemann¶
⚪ Mei: Tal como dijo Lina antes. Se confirma que efectivamente todas las componentes son cero.
D.6 Reglas de conversión de unidades¶
🟡 Lina: En este formulario usamos unidades geométricas \(G = c = 1\), pero en el texto principal el sistema de unidades varía según el capítulo. Aquí resumo las reglas de conversión, así que cuando tengas dudas vuelve aquí.
D.6.1 ¿Por qué hacer \(c = 1\)?¶
🔵 Kai: Para empezar, ¿por qué ponemos la velocidad de la luz igual a 1?
🟡 Lina: En relatividad especial, el tiempo y el espacio se mezclan. \(c\) no es más que "la tasa de conversión entre tiempo y espacio". Al hacer \(c = 1\), tanto el tiempo como el espacio se miden en las mismas unidades (por ejemplo metros), y las fórmulas quedan más limpias. Por ejemplo, \(E = mc^2\) se convierte en \(E = m\). Lo introdujimos en Cap. 4.
⚪ Mei: Ya veo, la energía y la masa tienen la misma dimensión.
D.6.2 Reglas de conversión con \(c = 1\)¶
🟡 Lina: En el sistema de unidades \(c = 1\), las dimensiones de tiempo, longitud, masa y energía se unifican de la siguiente manera.
Tabla D.1: Unificación dimensional y conversión con \(c=1\)
| Dimensión en SI | Dimensión con \(c = 1\) | Conversión |
|---|---|---|
| Tiempo \([\text{s}]\) | Longitud \([\text{m}]\) | Un tiempo de \(1\,\text{s}\) corresponde a una longitud \(c \times 1\,\text{s} = 3.0 \times 10^8\,\text{m}\) |
| Velocidad \([\text{m/s}]\) | Adimensional | \(v/c\) se convierte en "la velocidad" |
| Energía \([\text{J}]\) | Masa \([\text{kg}]\) | \(E = mc^2 \to E = m\) |
| Momento \([\text{kg}\cdot\text{m/s}]\) | Masa \([\text{kg}]\) | Con \(c = 1\), la velocidad \(v\) se convierte en una cantidad adimensional que expresa "cuántas veces la velocidad de la luz" (por ejemplo, la mitad de la velocidad de la luz es \(v = 0.5\)). La dimensión del momento relativista \(p = m\gamma v\) (\(\gamma = 1/\sqrt{1-v^2}\) es el factor de Lorentz, ver Cap. 3) es \([\text{kg}] \times [1] \times [1] = [\text{kg}]\), así que el momento tiene la misma dimensión que la masa. \(E^2 = p^2c^2 + m^2c^4\) en SI se simplifica a \(E^2 = p^2 + m^2\) |
🔵 Kai: ¿Cómo se vuelve a SI?
🟡 Lina: Se recuperan los factores de \(c\) por análisis dimensional. El procedimiento es:
- Verificar las dimensiones SI de cada término de la ecuación
- Multiplicar los términos con dimensiones incorrectas por la potencia apropiada de \(c\) para igualar dimensiones
⚪ Mei: Con un ejemplo concreto sería más fácil de entender.
🟡 Lina: Veamos con ecuaciones representativas.
Tabla D.2: Ejemplos de conversión de \(c=1\) a SI
| Ecuación con \(c = 1\) | Ecuación en SI | Factor recuperado |
|---|---|---|
| \(E = m\) | \(E = mc^2\) | \(c^2\) |
| \(ds^2 = -dt^2 + dx^2\) | \(ds^2 = -c^2 dt^2 + dx^2\) | \(c^2\) en \(dt^2\) |
| \(p^\mu = m\,U^\mu\), \(U^0 = \gamma\) | \(p^\mu = m\,U^\mu\), \(U^0 = \gamma c\) | \(c\) en \(U^0\) |
| \(\tau = t\sqrt{1 - v^2}\) | \(\tau = t\sqrt{1 - v^2/c^2}\) | \(v^2 \to v^2/c^2\) |
D.6.3 Reglas de conversión con \(G = 1\)¶
🟡 Lina: Si además hacemos \(G = 1\), la masa también adquiere la dimensión de longitud.
Tabla D.3: Unificación dimensional y conversión con \(G=c=1\)
| Dimensión en SI | Dimensión con \(G = c = 1\) | Conversión |
|---|---|---|
| Masa \([\text{kg}]\) | Longitud \([\text{m}]\) | Una masa de \(1\,\text{kg}\) corresponde a una longitud \(\frac{G}{c^2} \times 1\,\text{kg} = 7.43 \times 10^{-28}\,\text{m}\) |
| Densidad de energía \([\text{J/m}^3]\) | \([\text{m}^{-2}]\) | \(\rho\,[\text{m}^{-2}] = (G/c^4)\,\rho_E\,[\text{J/m}^3]\) (\(\rho_E\) es la densidad de energía en SI. \(\rho\) en unidades geométricas es la forma que aparece en el lado derecho de la ecuación de Einstein) |
| Presión \([\text{Pa}]\) | \([\text{m}^{-2}]\) | \(p \to Gp/c^4\) |
🔵 Kai: Que la masa del Sol se convierta en una "longitud" es curioso.
🟡 Lina: Para el Sol, \(GM_\odot/c^2 \approx 1.48\,\text{km}\). Así que en unidades geométricas se puede decir que "la masa del Sol es aproximadamente 1.5 km". El radio de Schwarzschild \(r_s = 2M\) (unidades geométricas) es en SI \(r_s = 2GM/c^2 \approx 3.0\,\text{km}\). Resumo el procedimiento para volver a SI:
Procedimiento de conversión \(G = c = 1\) → SI: 1. Sustituir \(M\) (masa) en la ecuación por \(GM/c^2\) (dimensión de longitud) 2. Recuperar los factores restantes de \(c\) y \(G\) por análisis dimensional
⚪ Mei: Es decir, cuando veo \(M\) en una ecuación en unidades geométricas, lo reinterpreto como \(GM/c^2\) y luego ajusto las dimensiones.
✅ Verificación de comprensión: La ecuación de Einstein \(G_{\mu\nu} = 8\pi T_{\mu\nu}\) escrita en unidades geométricas (\(G = c = 1\)), al pasarla a unidades SI, ¿qué factor lleva el lado derecho?
Respuesta
En unidades SI se convierte en \(G_{\mu\nu} = \frac{8\pi G}{c^4} T_{\mu\nu}\). El lado derecho lleva el factor \(G/c^4\). Este factor es necesario por análisis dimensional para igualar las dimensiones del tensor de Einstein (dimensión \([\text{m}^{-2}]\)) con las del tensor de energía-momento (dimensión \([\text{kg/(m·s}^2)]\)).
Tabla D.4: Ejemplos de conversión de \(G=c=1\) a SI
| Ecuación con \(G = c = 1\) | Ecuación en SI |
|---|---|
| \(r_s = 2M\) | \(r_s = 2GM/c^2\) |
| \(\Phi = -M/r\) | \(\Phi = -GM/r\) |
| \(G_{\mu\nu} = 8\pi T_{\mu\nu}\) | \(G_{\mu\nu} = \frac{8\pi G}{c^4} T_{\mu\nu}\) |
| \(H^2 = \frac{8\pi}{3}\rho\) | \(H^2 = \frac{8\pi G}{3}\rho\) (\(\rho\): densidad de masa \([\text{kg/m}^3]\). Si se usa la densidad de energía \(\rho_E = \rho c^2\,[\text{J/m}^3]\): \(H^2 = \frac{8\pi G}{3c^2}\rho_E\)) |
D.6.4 Uso de sistemas de unidades en el texto principal¶
🟡 Lina: En el texto principal, el sistema de unidades varía según el capítulo. Usa lo siguiente como guía.
Tabla D.5: Sistemas de unidades por capítulo del texto principal
| Capítulo | Sistema de unidades | Razón |
|---|---|---|
| Capítulos 0–1 | SI (\(c\), \(G\) explícitos) | Conexión con la física del bachillerato. Muchos cálculos numéricos |
| Capítulo 2 | Se introduce \(c = 1\) | Simplificar las fórmulas de relatividad especial |
| Capítulos 3–5 | \(c\) explícito | Discusión numérica del principio de equivalencia (GPS, etc.) |
| Capítulos 6–7 | \(G = c = 1\) (se añade \(G = 1\)) | Discusión geométrica de métricas y geodésicas |
| Capítulos 8–10 | \(c\) explícito (\(r_s = 2GM/c^2\)) | Cálculos numéricos de experimentos del sistema solar |
| Capítulos 11–13 | \(G = c = 1\) | Cálculos tensoriales. Escribir \(c\) hace las fórmulas engorrosas |
| Capítulos 14–17 | \(G = c = 1\) | Geometría de agujeros negros |
| Cap. 18 | \(c\) explícito | Cantidades físicas de estrellas de neutrones (unidades SI) |
| Capítulos 19–20 | \(c\) explícito | Observables de ondas gravitacionales (Hz, strain) |
| Capítulos 21–23 | \(c = 1\), \(G\) según contexto | Cosmología. Ecuaciones de Friedmann (discusión geométrica con \(G=1\), comparación con observaciones con \(G\) explícito) |
| Capítulos 24–25 | \(G = c = 1\) | Formas diferenciales, gravedad cuántica |
🔵 Kai: Que cambie según el capítulo parece que puede causar confusión, pero hay una razón.
🟡 Lina: Así es. Para discusiones geométricas \(G = c = 1\) es lo natural, y cuando se compara con observaciones se necesita SI. Lo importante es ser siempre consciente de "qué sistema de unidades se está usando ahora". Si te pierdes, vuelve a esta tabla.
D.7 Guía de uso del formulario¶
🟡 Lina: Por último, resumo las notas a tener en cuenta al usar este formulario.
Tabla D.6: Notas de uso del formulario
| Nota | Descripción |
|---|---|
| Sistema de unidades | Unidades geométricas \(G = c = 1\). Para reglas de conversión ver D.6 |
| Simetrías | Se omiten las componentes obtenidas por la simetría en índices inferiores de los símbolos de Christoffel |
| Convención de signos | El signo de la métrica es \((-,+,+,+)\) |
| Índices con sombrero | Representan componentes en base ortonormal |
🔵 Kai: Esto lo voy a imprimir y pegar en mi escritorio. ...Pero sinceramente, solo viendo las fórmulas probablemente me confunda sobre "cuál usar".
⚪ Mei: Yo lo voy a guardar como marcador en la tableta. Mirando la forma de la métrica debería poder saber qué sección consultar.
🟡 Lina: Cualquiera de las dos opciones está bien. Lo importante es que no se trata de memorizar las fórmulas, sino de poder consultarlas rápidamente cuando las necesiten. Y quiero que siempre tengan en mente el significado físico de cada cantidad — la métrica es "la regla", los símbolos de Christoffel son "la guía de la caída libre", el tensor de Riemann es "la fuerza de marea", el tensor de Einstein es "el puente entre curvatura y materia".
Conclusión¶
🟡 Lina: Con esto el formulario está completo. Cuando encuentren una nueva métrica en el texto principal, vuelvan aquí para confirmar los símbolos de Christoffel y las cantidades de curvatura. Quiero que lo usen repetidamente como un "diccionario" de cálculos.
Problemas de práctica¶
📝 Ejercicios:
- Derivación de \(\Gamma^r{}_{tt}\) → Problema B-1. \(\Gamma^r_{\ tt}\) de Schwarzschild
- Derivación de \(\Gamma^r{}_{rr}\) → Problema B-2. \(\Gamma^r_{\ rr}\) de Schwarzschild
- Verificación de la base ortonormal → Problema B-6. Verificación de la base ortonormal de Schwarzschild
- Correspondencia con la métrica esféricamente simétrica general → Problema B-7. Verificación de Christoffel para simetría esférica general
- Simetrías del tensor de Riemann → Problema B-8. Aplicación de las simetrías del tensor de Riemann
- Verificación de \(R_{\hat{t}\hat{t}} = 0\) del tensor de Ricci → Problema B-9. \(R_{tt} = 0\) de Schwarzschild
- Cálculo del escalar de Kretschmann → Problema M-3. Escalar de Kretschmann de Schwarzschild
- Ecuación de geodésicas y límite newtoniano → Problema M-1. Límite newtoniano de la geodésica de Schwarzschild
- Órbitas circulares y fuerza de marea → Problema A-1. Órbita circular de Schwarzschild y fuerzas de marea
- Derivación de la función de masa \(m(r)\) → Problema M-4. Derivación de la función de masa
- Símbolos de Christoffel de FRW → Problema B-4. \(\Gamma^r_{\ tr}\) de FRW
- Símbolos de Christoffel de FRW → Problema B-5. \(\Gamma^t_{\ \theta\theta}\) de FRW
- Traza del tensor de Einstein y curvatura escalar → Problema B-10. Curvatura escalar de FRW
- Derivación de las ecuaciones de Friedmann → Problema M-2. FRW y ecuaciones de Friedmann · Ley de conservación
- Constante cosmológica y espaciotiempo de de Sitter → Problema A-2. de Sitter y la constante cosmológica
- Símbolo de Christoffel en coordenadas esféricas \(\Gamma^\theta{}_{\varphi\varphi}\) → Problema B-3. \(\Gamma^\theta_{\ \varphi\varphi}\) en coordenadas esféricas de Minkowski
Referencias¶
- Hartle, J. B. (2003). Gravity: An Introduction to Einstein's General Relativity, Ch. 24. Addison-Wesley.
- Schutz, B. F. (2022). A First Course in General Relativity, 3rd ed., Appendix. Cambridge University Press.
- Misner, C. W., Thorne, K. S., & Wheeler, J. A. (1973). Gravitation. W. H. Freeman. (Conocido como MTW. Un libro de texto clásico que aún se consulta como formulario)
Feedback on this page
Let us know if something was unclear, incorrect, or could be improved.