Cap. 6 Soluciones¶
← Volver a ejercicios | Volver al capítulo
Índice
Básico
- B-1. Jacobiano de coordenadas polares en 2 dimensiones
- B-2. Métrica inversa en coordenadas esféricas tridimensionales
- B-3. Representación matricial de una métrica general bidimensional
- B-4. Tensor métrico en un punto específico sobre la esfera
- B-5. Matriz jacobiana de una transformación lineal de coordenadas
- B-6. Aplicación de la ley de transformación del tensor métrico
- B-7. Componentes cartesianas de los vectores base coordenados
- B-8. Determinante de la matriz jacobiana de la transformación inversa
Intermedio
- M-1. Transformación de coordenadas \((u, v)\) y tensor métrico
- M-2. Derivación del elemento de línea en coordenadas esféricas
- M-3. Tensor métrico en coordenadas parabólicas
- M-4. Demostración de la simetría del tensor métrico
- M-5. Métrica de la superficie cilíndrica y planitud
- M-6. Geometría de un "círculo" sobre una superficie esférica
- M-7. Derivación de \(g'_{33}\) mediante la ley de transformación del tensor métrico
Avanzado
Básico¶
B-1. Jacobiano de coordenadas polares en 2 dimensiones¶
Problema:
Determina el determinante (jacobiano) \(\det J\) de la matriz jacobiana
que transforma de coordenadas polares bidimensionales \((r, \theta)\) a coordenadas cartesianas \((x, y)\).
Estrategia de resolución: Calcular directamente el determinante de la matriz jacobiana.
La matriz jacobiana es:
Calculando el determinante:
Verificación: Esto coincide con el hecho de que el jacobiano del elemento de área en coordenadas polares \(dA = r\,dr\,d\theta\) es \(r\). Además, es regular para \(r > 0\) y degenera en \(r = 0\) (el origen), lo cual es geométricamente correcto.
B-2. Métrica inversa en coordenadas esféricas tridimensionales¶
Problema:
A partir del elemento de línea en coordenadas esféricas tridimensionales \((r, \theta, \varphi)\)
obtén la matriz inversa \(g^{ij}\) del tensor métrico \(g_{ij}\) (la métrica inversa (inverse metric)).
Estrategia de resolución: Dado que el tensor métrico es una matriz diagonal, la matriz inversa se obtiene tomando el recíproco de cada componente diagonal.
El tensor métrico es:
Como la inversa de una matriz diagonal se obtiene tomando el recíproco de cada componente diagonal:
Verificación: Comprobamos que \(g_{ij}\,g^{jk} = \delta_i^k\). Por ejemplo, la componente \((2,2)\): \(r^2 \cdot \dfrac{1}{r^2} = 1\). La componente \((3,3)\): \(r^2\sin^2\theta \cdot \dfrac{1}{r^2\sin^2\theta} = 1\). Las componentes no diagonales son todas 0. Efectivamente se obtiene la matriz identidad. ✓
B-3. Representación matricial de una métrica general bidimensional¶
Problema:
En coordenadas bidimensionales \((u, v)\), la métrica está dada por
Escribe el tensor métrico \(g_{ij}\) en forma de matriz \(2 \times 2\).
Estrategia de resolución: Expandir \(ds^2 = g_{ij}\,du^i\,du^j\) y comparar los coeficientes.
Expandiendo el elemento de línea:
Utilizando la simetría del tensor métrico \(g_{12} = g_{21}\), el coeficiente del término cruzado es \(2g_{12}\).
Comparando con el elemento de línea dado:
- \(g_{11} = 1 + u^2\)
- \(2g_{12} = 2uv \implies g_{12} = uv\)
- \(g_{22} = 1 + v^2\)
Verificación: El determinante \(\det g = (1+u^2)(1+v^2) - u^2v^2 = 1 + u^2 + v^2 > 0\), por lo que es definida positiva y consistente como métrica de Riemann. ✓
B-4. Tensor métrico en un punto específico sobre la esfera¶
Problema:
En la métrica de una esfera de radio \(a\)
escribe explícitamente las componentes del tensor métrico \(g_{ij}\) en el punto \((\theta, \varphi) = (\pi/3,\, 0)\).
Estrategia de resolución: Sustituir \(\theta = \pi/3\) en las componentes del tensor métrico.
El tensor métrico de la esfera es:
Cuando \(\theta = \pi/3\), se tiene \(\sin(\pi/3) = \dfrac{\sqrt{3}}{2}\), por lo que \(\sin^2(\pi/3) = \dfrac{3}{4}\).
Verificación: Si \(\theta = \pi/2\) (ecuador), entonces \(g_{22} = a^2\) es máximo; si \(\theta = 0\) (polo norte), entonces \(g_{22} = 0\) y la métrica degenera. Como \(\theta = \pi/3\) se encuentra entre el ecuador y el polo norte, \(g_{22} = \frac{3}{4}a^2\) está entre \(0\) y \(a^2\), lo cual es coherente. ✓
B-5. Matriz jacobiana de una transformación lineal de coordenadas¶
Problema:
En dos dimensiones, la transformación de las coordenadas \((x^1, x^2) = (x, y)\) a \((u^1, u^2) = (u, v)\) está dada por
Obtén la matriz jacobiana \(\dfrac{\partial x^i}{\partial u^j}\).
Estrategia de resolución: Calcular directamente cada derivada parcial.
De \(x = u + v\), \(y = u - v\):
Verificación: \(\det J = 1 \cdot (-1) - 1 \cdot 1 = -2 \neq 0\), por lo que es regular. Esto es consistente con la existencia de la transformación inversa \(u = \frac{x+y}{2}\), \(v = \frac{x-y}{2}\). ✓
B-6. Aplicación de la ley de transformación del tensor métrico¶
Problema:
Para la transformación de coordenadas de Problema B-5. Matriz jacobiana de una transformación lineal de coordenadas, aplica la ley de transformación del tensor métrico
a la métrica en coordenadas cartesianas \(g_{ij} = \delta_{ij}\), y obtén el tensor métrico \(g'_{kl}\) en las nuevas coordenadas \((u, v)\). Escribe el resultado en forma matricial.
Estrategia de resolución: Se calcula \(g' = J^T g\,J = J^T J\) (ya que \(g = \delta_{ij}\)).
Se calculan las componentes:
- \((1,1)\): \(1 \cdot 1 + 1 \cdot 1 = 2\)
- \((1,2)\): \(1 \cdot 1 + 1 \cdot (-1) = 0\)
- \((2,1)\): \(1 \cdot 1 + (-1) \cdot 1 = 0\)
- \((2,2)\): \(1 \cdot 1 + (-1)(-1) = 2\)
Es decir, el elemento de línea es \(ds^2 = 2\,du^2 + 2\,dv^2\).
Verificación: Se confirma mediante sustitución directa. A partir de \(dx = du + dv\), \(dy = du - dv\):
B-7. Componentes cartesianas de los vectores base coordenados¶
Problema:
Para el vector base coordenado (coordinate basis vector) \(\boldsymbol{e}_\theta\) en coordenadas polares bidimensionales, obtén las componentes cartesianas \((\boldsymbol{e}_\theta)^x\), \((\boldsymbol{e}_\theta)^y\) en el punto \(r = 3\), \(\theta = \pi/4\).
Estrategia de resolución: Obtener las componentes cartesianas de \(\boldsymbol{e}_\theta\) mediante derivadas parciales y sustituir los valores concretos.
Por la definición de los vectores base coordenados:
De \(x = r\cos\theta\), \(y = r\sin\theta\) se obtiene:
Sustituyendo \(r = 3\), \(\theta = \pi/4\), y dado que \(\sin(\pi/4) = \cos(\pi/4) = \dfrac{\sqrt{2}}{2}\):
Verificación: El cuadrado de la magnitud de \(\boldsymbol{e}_\theta\) es \(|\boldsymbol{e}_\theta|^2 = \left(\frac{3\sqrt{2}}{2}\right)^2 + \left(\frac{3\sqrt{2}}{2}\right)^2 = \frac{18}{4} + \frac{18}{4} = 9 = r^2\). Esto coincide con la componente del tensor métrico \(g_{\theta\theta} = r^2 = 9\). ✓
B-8. Determinante de la matriz jacobiana de la transformación inversa¶
Problema:
En coordenadas polares bidimensionales, calcula el determinante \(\det \tilde{J}\) de la matriz jacobiana de la transformación inversa
y verifica la relación con \(\det J\) obtenido en Problema B-1. Jacobiano de coordenadas polares en 2 dimensiones.
Estrategia de resolución: Derivar la relación entre los determinantes a partir de la relación \(J\tilde{J} = I\).
Tomando el determinante de ambos lados de \(J\tilde{J} = I\):
De Problema B-1. Jacobiano de coordenadas polares en 2 dimensiones se tiene \(\det J = r\), por lo que:
\(\det J\) y \(\det \tilde{J}\) son recíprocos entre sí.
Verificación: Confirmamos calculando directamente a partir de la matriz jacobiana de la transformación inversa. Del texto:
Intermedio¶
M-1. Transformación de coordenadas \((u, v)\) y tensor métrico¶
Problema:
Figura de referencia: Figura 5.1: Coordenadas cartesianas y polares
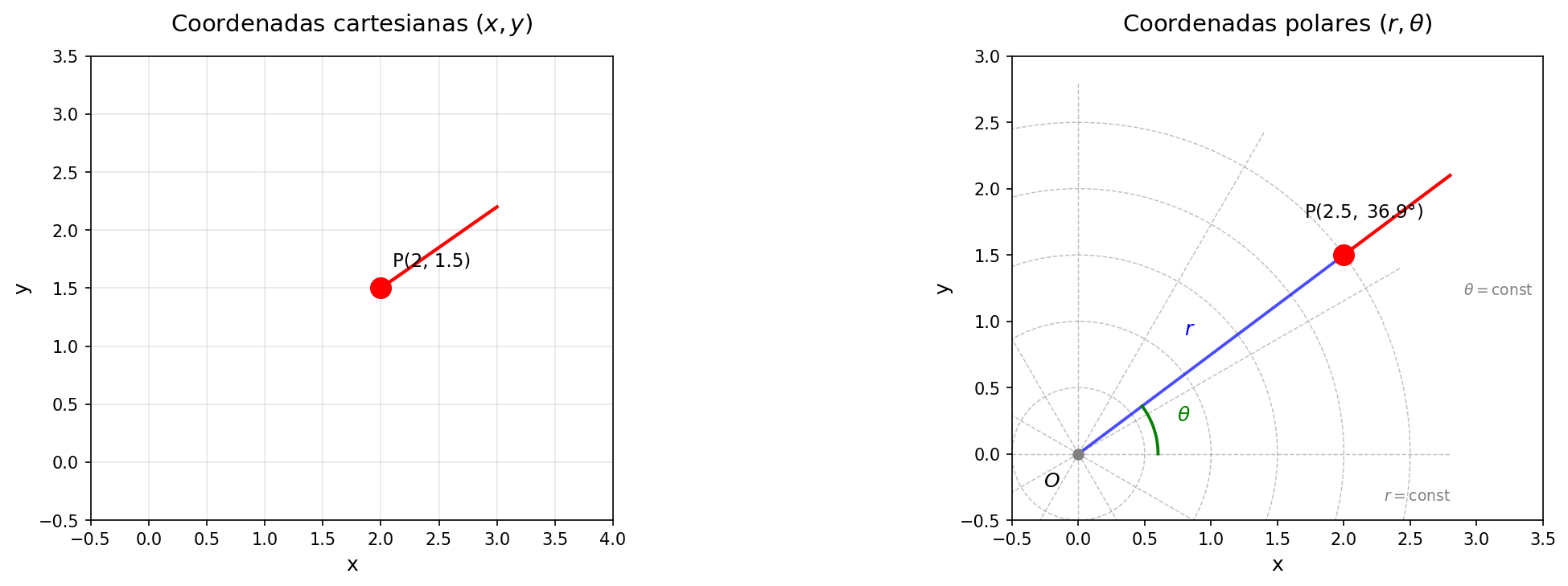{kind=link}
En un plano bidimensional, considera la transformación de coordenadas \(u = x + y\), \(v = x - y\).
(a) Obtén la matriz jacobiana \(\dfrac{\partial(x, y)}{\partial(u, v)}\).
(b) Obtén el tensor métrico \(g'_{ij}\) en este sistema de coordenadas, utilizando la ley de transformación.
(c) Reescribe \(ds^2 = dx^2 + dy^2\) en estas coordenadas y verifica que coincide con el resultado de (b).
Estrategia de resolución: Obtener la matriz jacobiana de la transformación inversa, derivar el tensor métrico mediante la regla de transformación y verificar por sustitución directa.
(a) Matriz jacobiana \(\partial(x, y)/\partial(u, v)\):
Obtenemos la transformación inversa de la transformación de coordenadas \(u = x + y\), \(v = x - y\). Resolviendo el sistema de ecuaciones,
La matriz jacobiana es,
(b) Derivación del tensor métrico \(g'_{ij}\) mediante la regla de transformación:
Usamos la regla de transformación \(g'_{kl} = \dfrac{\partial x^i}{\partial u^k}\dfrac{\partial x^j}{\partial u^l}\,g_{ij}\). Dado que la métrica en las coordenadas originales es \(g_{ij} = \delta_{ij}\) (coordenadas cartesianas), basta con calcular \(g' = J^T J\).
Calculamos cada componente:
-
\((1,1)\): \(\dfrac{1}{2}\cdot\dfrac{1}{2} + \dfrac{1}{2}\cdot\dfrac{1}{2} = \dfrac{1}{4} + \dfrac{1}{4} = \dfrac{1}{2}\)
-
\((1,2)\): \(\dfrac{1}{2}\cdot\dfrac{1}{2} + \dfrac{1}{2}\cdot\left(-\dfrac{1}{2}\right) = \dfrac{1}{4} - \dfrac{1}{4} = 0\)
-
\((2,1)\): \(\dfrac{1}{2}\cdot\dfrac{1}{2} + \left(-\dfrac{1}{2}\right)\cdot\dfrac{1}{2} = \dfrac{1}{4} - \dfrac{1}{4} = 0\)
-
\((2,2)\): \(\dfrac{1}{2}\cdot\dfrac{1}{2} + \left(-\dfrac{1}{2}\right)\left(-\dfrac{1}{2}\right) = \dfrac{1}{4} + \dfrac{1}{4} = \dfrac{1}{2}\)
(c) Verificación por sustitución directa:
A partir de \(x = (u+v)/2\), \(y = (u-v)/2\),
Sustituyendo en \(ds^2 = dx^2 + dy^2\),
Esto coincide exactamente con el tensor métrico \(g'_{ij} = \text{diag}(1/2,\, 1/2)\) obtenido en (b). ✓
Comprobación: \(\det J = \dfrac{1}{2}\cdot\left(-\dfrac{1}{2}\right) - \dfrac{1}{2}\cdot\dfrac{1}{2} = -\dfrac{1}{2} \neq 0\), por lo que es regular. También se verifica que \(\det g' = 1/4 = (\det J)^2\). Dado que la métrica es diagonal y constante, este sistema de coordenadas es ortogonal y el espacio es plano (consistente con la discusión en Problema M-5. Métrica de la superficie cilíndrica y planitud). ✓
M-2. Derivación del elemento de línea en coordenadas esféricas¶
Problema:
Deriva el elemento de línea en coordenadas esféricas tridimensionales \((r, \theta, \varphi)\)
a partir del elemento de línea en coordenadas cartesianas \(ds^2 = dx^2 + dy^2 + dz^2\) y la transformación de coordenadas
Expresa los diferenciales totales \(dx\), \(dy\), \(dz\) en términos de \((dr, d\theta, d\varphi)\), y muestra todo el proceso de sustitución y simplificación.
Estrategia de resolución: Calcular las diferenciales totales de \(x = r\sin\theta\cos\varphi\), \(y = r\sin\theta\sin\varphi\), \(z = r\cos\theta\) y sustituirlas en \(ds^2 = dx^2 + dy^2 + dz^2\).
Cálculo de las diferenciales totales:
Cálculo de \(dx\):
Cálculo de \(dy\):
Cálculo de \(dz\):
Desarrollo de \(dx^2\):
Desarrollo de \(dy^2\):
Desarrollo de \(dz^2\):
Suma de los términos:
Coeficiente de \(dr^2\):
Coeficiente de \(d\theta^2\):
Coeficiente de \(d\varphi^2\):
Coeficiente de \(dr\,d\theta\):
Coeficiente de \(dr\,d\varphi\):
Coeficiente de \(d\theta\,d\varphi\):
Resultado final:
Todos los términos cruzados se anulan:
Verificación:
- Si nos restringimos a \(\theta = \pi/2\) (plano \(xy\)), se obtiene \(ds^2 = dr^2 + r^2\,d\varphi^2\), que coincide con el elemento de línea en coordenadas polares bidimensionales. ✓
- Análisis dimensional: cada término tiene dimensiones de [longitud]\(^2\). ✓
M-3. Tensor métrico en coordenadas parabólicas¶
Problema:
Las coordenadas parabólicas (parabolic coordinates) bidimensionales \((\sigma, \tau)\) se definen mediante
(a) Encuentra la matriz jacobiana \(\dfrac{\partial x^i}{\partial u^j}\) (donde \((u^1, u^2) = (\sigma, \tau)\)).
(b) Utilizando la ley de transformación del tensor métrico, deduce el tensor métrico \(g'_{kl}\) en coordenadas parabólicas y expresa el elemento de línea \(ds^2\) en términos de \((\sigma, \tau)\).
(a) Matriz jacobiana:
A partir de \(x = \sigma\tau\), \(y = \frac{1}{2}(\tau^2 - \sigma^2)\):
(b) Derivación del tensor métrico:
Calculamos \(g' = J^T J\):
Cada componente:
- \((1,1)\): \(\tau^2 + \sigma^2\)
- \((1,2)\): \(\tau\sigma - \sigma\tau = 0\)
- \((2,1)\): \(\sigma\tau - \tau\sigma = 0\)
- \((2,2)\): \(\sigma^2 + \tau^2\)
Por lo tanto, el elemento de línea es:
Verificación: La métrica tiene una forma conformemente plana (conformal to flat) \(ds^2 = \Omega^2(d\sigma^2 + d\tau^2)\). Esto significa que las coordenadas parabólicas constituyen un sistema de coordenadas ortogonales (\(g_{12} = 0\)), lo cual es consistente con las propiedades de las aplicaciones conformes.
Además, se puede verificar que \(\det J = \tau^2 + \sigma^2\) y que se cumple \(\det g' = (\sigma^2 + \tau^2)^2 = (\det J)^2\). ✓
M-4. Demostración de la simetría del tensor métrico¶
Problema:
Figura de referencia: Figura 5.2: Métrica de la esfera
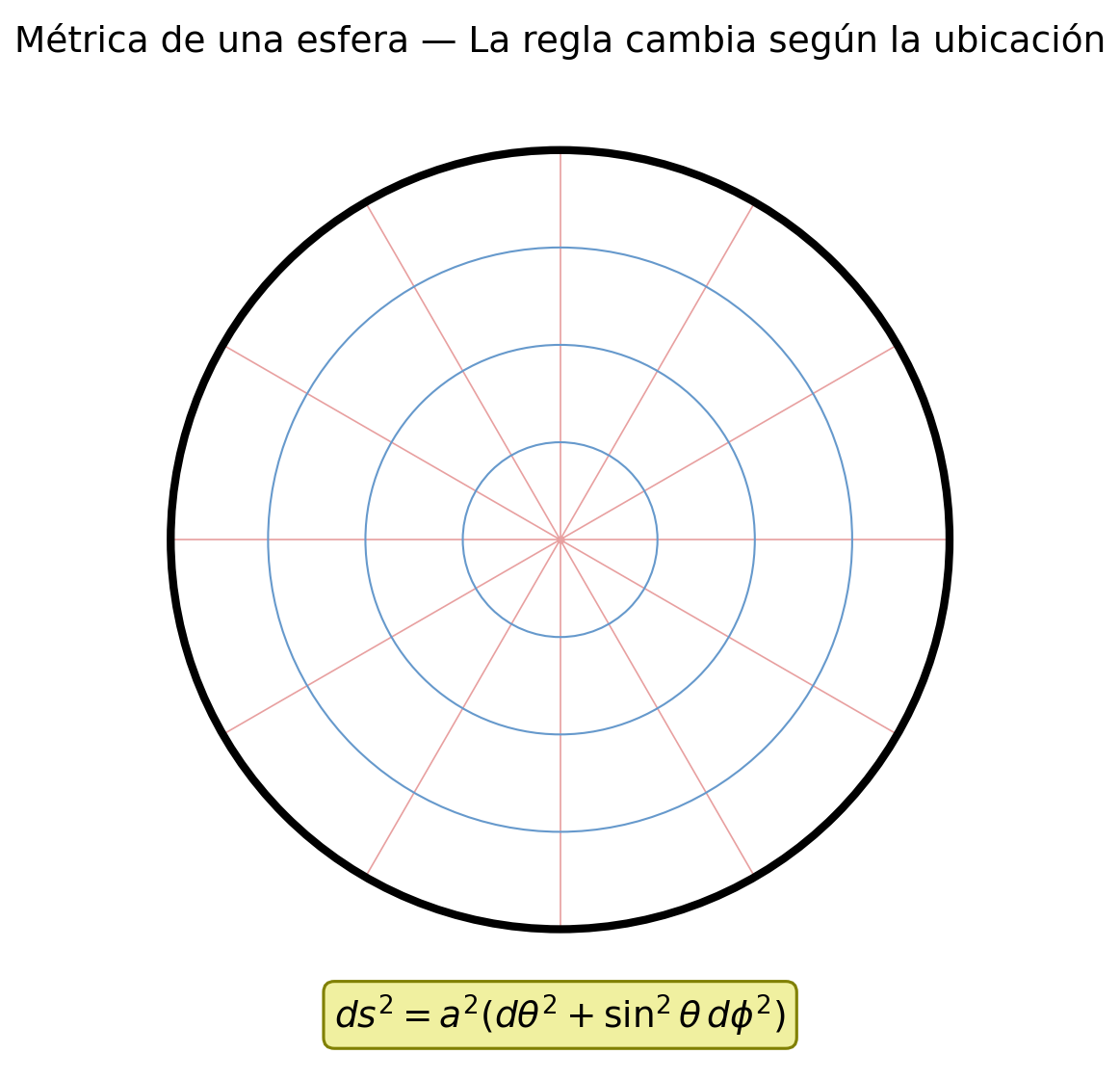{kind=link}
La ley de transformación del tensor métrico es
A partir de esta expresión, demuestra que el tensor métrico es un tensor simétrico, es decir, que \(g'_{kl} = g'_{lk}\), suponiendo la simetría en el sistema de coordenadas original \(g_{ij} = g_{ji}\).
Estrategia de resolución: Intercambiar los índices en el lado derecho de la ley de transformación y utilizar \(g_{ij} = g_{ji}\).
La ley de transformación del tensor métrico es:
Escribiendo \(g'_{lk}\):
Intercambiamos los índices mudos \(i\) y \(j\) en el lado derecho (solo se cambia el nombre de los índices de sumación, por lo que el valor no cambia):
Aquí, utilizando \(g_{ji} = g_{ij}\) (hipótesis de simetría en el sistema de coordenadas original):
Por lo tanto, si el tensor métrico es simétrico en el sistema de coordenadas original, la simetría se preserva bajo cualquier transformación de coordenadas. \(\blacksquare\)
Verificación: Comprobamos con el ejemplo concreto de Problema B-6. Aplicación de la ley de transformación del tensor métrico. \(g'_{kl} = \begin{pmatrix} 2 & 0 \\ 0 & 2 \end{pmatrix}\) es claramente simétrico. En las coordenadas parabólicas de Problema M-3. Tensor métrico en coordenadas parabólicas también se tiene \(g'_{12} = g'_{21} = 0\), confirmando la simetría. ✓
M-5. Métrica de la superficie cilíndrica y planitud¶
Problema:
Cuando se describe la superficie de un cilindro de radio \(a\) mediante las coordenadas \((\varphi, z)\) (donde \(\varphi\) es el ángulo en la dirección circunferencial y \(z\) es la altura), el elemento de línea es
(a) Escribe el tensor métrico \(g_{ij}\) en forma matricial.
(b) Las componentes del tensor métrico de la superficie cilíndrica son constantes que no dependen de las coordenadas. Contrasta este hecho con que las componentes del tensor métrico de la esfera dependen de \(\theta\), y discute, basándote en el contenido de este capítulo, si la afirmación "componentes del tensor métrico constantes ⇒ el espacio es plano" es correcta o no.
(a) Representación matricial del tensor métrico:
A partir del elemento de línea \(ds^2 = a^2\,d\varphi^2 + dz^2\):
(b) Relación entre la constancia del tensor métrico y la planitud:
Conclusión: La afirmación "las componentes del tensor métrico son constantes ⇒ el espacio es plano" es correcta.
A continuación se exponen los argumentos.
La superficie cilíndrica es plana:
Una superficie cilíndrica puede crearse enrollando una hoja de papel. La operación de enrollar no altera en absoluto las relaciones de distancia sobre el papel (no hay estiramiento ni compresión), por lo que la geometría intrínseca de la superficie cilíndrica es la misma que la de un plano. De hecho, si realizas el cambio de coordenadas \(s = a\varphi\):
lo cual es exactamente el elemento de línea de coordenadas cartesianas en el plano.
Significado de que el tensor métrico sea constante:
Cuando todas las componentes del tensor métrico son constantes, es posible transformar la métrica a \(\delta_{ij}\) (la matriz identidad) mediante un cambio de coordenadas (una transformación lineal con una matriz constante). Concretamente, si \(g_{ij}\) es una matriz constante simétrica y definida positiva, existe una matriz constante \(A\) tal que \(A^T g A = I\). Las coordenadas resultantes tras esta transformación son coordenadas cartesianas propiamente dichas, y el espacio es plano.
Contraste con la esfera:
El tensor métrico de la esfera \(g_{ij} = \begin{pmatrix} a^2 & 0 \\ 0 & a^2\sin^2\theta \end{pmatrix}\) depende de \(\theta\). Sin embargo, como se menciona en este capítulo, el mero hecho de que el tensor métrico dependa de las coordenadas no implica que el espacio sea curvo (incluso en coordenadas polares del plano, \(g_{22} = r^2\) depende de las coordenadas). Para determinar si un espacio es realmente curvo, se debe verificar si es posible hacer constantes las componentes del tensor métrico (o reducirlas a \(\delta_{ij}\)) mediante algún cambio de coordenadas. En el caso de la esfera, ningún cambio de coordenadas permite hacer constante el tensor métrico, lo cual refleja que la esfera es intrínsecamente curva (estrictamente, esto se determina mediante el tensor de curvatura de Riemann).
Sin embargo, el recíproco no es válido (incluso en un espacio plano, si se usan coordenadas curvilíneas, el tensor métrico depende de las coordenadas).
M-6. Geometría de un "círculo" sobre una superficie esférica¶
Problema:
Considera un "círculo" (\(\theta = \theta_0\) = constante) centrado en el polo norte (\(\theta = 0\)) sobre una superficie esférica de radio \(a\).
(a) Obtén la circunferencia \(C\) de este círculo utilizando la métrica de la esfera \(ds^2 = a^2\,d\theta^2 + a^2\sin^2\theta\,d\varphi^2\).
(b) Determina la distancia \(r\) sobre la superficie esférica desde el polo norte hasta este círculo (la distancia a lo largo de un meridiano con \(\varphi\) constante).
(c) Calcula \(C/(2\pi r)\) y verifica que cuando \(\theta_0\) aumenta, este cociente se vuelve menor que 1. Esto es una manifestación de que la esfera posee curvatura positiva.
Estrategia de resolución: Utilizar la métrica de la superficie esférica \(ds^2 = a^2(d\theta^2 + \sin^2\theta\,d\varphi^2)\) para calcular la circunferencia y la distancia.
(a) Cálculo de la circunferencia \(C\):
Sobre la línea \(\theta = \theta_0\) = constante, se tiene \(d\theta = 0\), por lo que el elemento de línea es
Integrando \(\varphi\) de \(0\) a \(2\pi\),
(b) Distancia sobre la esfera desde el polo norte \(r\):
La distancia sobre la superficie esférica desde el polo norte (\(\theta = 0\)) hasta la línea \(\theta = \theta_0\) se mide a lo largo de un círculo máximo con \(\varphi\) = constante. Como \(d\varphi = 0\),
Integrando \(\theta\) de \(0\) a \(\theta_0\),
(c) Cálculo de \(C/(2\pi r)\):
Verificación de que es menor que 1 cuando \(\theta_0\) aumenta:
Para \(\theta_0 > 0\), se cumple \(\sin\theta_0 < \theta_0\) (ya que \(\sin x < x\) para \(x > 0\)). Por lo tanto,
En el límite \(\theta_0 \to 0\), \(\sin\theta_0/\theta_0 \to 1\), y para círculos suficientemente pequeños se recupera la misma relación \(C = 2\pi r\) que en un espacio plano. A medida que \(\theta_0\) aumenta, la razón decrece desde 1, y en \(\theta_0 = \pi/2\) (el ecuador) se obtiene \(C/(2\pi r) = \sin(\pi/2)/(\pi/2) = 2/\pi \approx 0{,}637\).
Significado físico: En un espacio plano, la relación entre circunferencia y radio es siempre \(C = 2\pi r\) (\(C/(2\pi r) = 1\)). El hecho de que esta razón sea menor que 1 en la esfera es un reflejo directo de que la esfera posee curvatura positiva. En un espacio con curvatura positiva, la circunferencia es "insuficiente" respecto a la distancia desde el centro — resulta más corta que en el caso plano. Esta es una propiedad geométrica intrínseca de la esfera, y es una cantidad que puede calcularse directamente a partir del tensor métrico.
Comprobación: Para \(\theta_0 = \pi\) (el "círculo" que rodea el polo sur), \(C = 2\pi a\sin\pi = 0\), \(r = a\pi\). Como el polo sur es un único punto, es correcto que la circunferencia sea cero. ✓
Realizando una expansión de Taylor para \(\theta_0 \to 0\), \(\sin\theta_0 \approx \theta_0 - \theta_0^3/6\), por lo que \(C/(2\pi r) \approx 1 - \theta_0^2/6\). Se sabe que para una esfera de curvatura \(K = 1/a^2\) se cumple \(C/(2\pi r) \approx 1 - Kr^2/6\); sustituyendo \(r = a\theta_0\) se obtiene \(1 - (1/a^2)(a\theta_0)^2/6 = 1 - \theta_0^2/6\), lo cual coincide. ✓
M-7. Derivación de \(g'_{33}\) mediante la ley de transformación del tensor métrico¶
Problema:
Utilizando la ley de transformación del tensor métrico
deriva la componente métrica \(g'_{33} = r^2\sin^2\theta\) de las coordenadas esféricas tridimensionales a partir de la métrica en coordenadas cartesianas \(g_{ij} = \delta_{ij}\). (Pista: utiliza \(\dfrac{\partial x}{\partial \varphi} = -r\sin\theta\sin\varphi\), \(\dfrac{\partial y}{\partial \varphi} = r\sin\theta\cos\varphi\), \(\dfrac{\partial z}{\partial \varphi} = 0\).)
Estrategia de resolución: A partir de la relación entre las coordenadas esféricas \((r, \theta, \varphi)\) y las coordenadas cartesianas \((x, y, z)\), se deriva \(g'_{33} = r^2\sin^2\theta\) utilizando la ley de transformación.
Cálculo:
Correspondencia de coordenadas: se establece \(u^1 = r\), \(u^2 = \theta\), \(u^3 = \varphi\), y \(x^1 = x\), \(x^2 = y\), \(x^3 = z\).
La ley de transformación es:
(Dado que \(g_{ij} = \delta_{ij}\), solo sobreviven los términos con \(i = j\).)
A partir de la transformación de coordenadas \(x = r\sin\theta\cos\varphi\), \(y = r\sin\theta\sin\varphi\), \(z = r\cos\theta\), se calculan las derivadas parciales:
Sustituyendo en la ley de transformación:
Esto coincide con el valor conocido de la componente \((3,3)\) del tensor métrico en coordenadas esféricas.
Verificación: Coincide con el coeficiente de \(d\varphi^2\) en el elemento de línea en coordenadas esféricas \(ds^2 = dr^2 + r^2\,d\theta^2 + r^2\sin^2\theta\,d\varphi^2\), derivado por sustitución directa en Problema M-2. Derivación del elemento de línea en coordenadas esféricas. ✓
Para \(\theta = \pi/2\) (plano ecuatorial), se obtiene \(g'_{33} = r^2\), lo cual se reduce a \(g_{\varphi\varphi} = r^2\) de las coordenadas polares bidimensionales. ✓
Para \(\theta = 0\) (sobre el eje \(z\)), se obtiene \(g'_{33} = 0\), lo cual es consistente con el hecho de que la coordenada \(\varphi\) degenera (sobre el eje \(z\), un cambio en \(\varphi\) no contribuye a la distancia). ✓
Avanzado¶
A-1. Tensor métrico en coordenadas curvilíneas generales¶
Problema:
Sobre un plano bidimensional, consideremos unas "coordenadas curvilíneas generales" \((u^1, u^2)\) definidas por:
donde \(f\) y \(g\) son funciones suficientemente suaves y la matriz jacobiana es regular.
(a) Expresa el tensor métrico \(g_{ij}\) en estas coordenadas en términos de las derivadas parciales de \(f\) y \(g\).
(b) Escribe la condición, en términos de las derivadas parciales de \(f\) y \(g\), para que los vectores base coordenados \(\boldsymbol{e}_1\) y \(\boldsymbol{e}_2\) sean ortogonales (\(g_{12} = 0\)).
(c) Para las coordenadas polares y las coordenadas parabólicas (véase Problema M-3. Tensor métrico en coordenadas parabólicas), verifica si la condición de ortogonalidad de (b) se satisface en cada caso.
(a) Derivación del tensor métrico:
Para \(x = f(u^1, u^2)\), \(y = g(u^1, u^2)\), transformamos la métrica en coordenadas cartesianas \(ds^2 = dx^2 + dy^2\).
Las diferenciales totales son:
De \(ds^2 = dx^2 + dy^2 = g_{ij}\,du^i\,du^j\):
Usando la notación abreviada \(f_i \equiv \dfrac{\partial f}{\partial u^i}\), \(g_i \equiv \dfrac{\partial g}{\partial u^i}\):
Escribiendo las componentes explícitamente:
(b) Condición de ortogonalidad:
La condición de ortogonalidad de los vectores base coordenados \(g_{12} = 0\) es:
Esto significa que el producto escalar de los dos vectores base coordenados \(\boldsymbol{e}_1 = (f_1, g_1)\) y \(\boldsymbol{e}_2 = (f_2, g_2)\) es cero.
(c) Verificación con ejemplos concretos:
Coordenadas polares \((u^1, u^2) = (r, \theta)\):
De \(f = r\cos\theta\), \(g = r\sin\theta\):
Verificación de la condición de ortogonalidad:
Las coordenadas polares forman un sistema de coordenadas ortogonales.
Coordenadas parabólicas \((u^1, u^2) = (\sigma, \tau)\):
De \(f = \sigma\tau\), \(g = \frac{1}{2}(\tau^2 - \sigma^2)\):
Verificación de la condición de ortogonalidad:
Las coordenadas parabólicas también forman un sistema de coordenadas ortogonales.
Comprobación: Esto es consistente con el hecho de que el tensor métrico de las coordenadas parabólicas obtenido en Problema M-3. Tensor métrico en coordenadas parabólicas es una matriz diagonal (\(g_{12} = 0\)). La métrica de las coordenadas polares \(ds^2 = dr^2 + r^2\,d\theta^2\) también es diagonal, lo cual es coherente. ✓
A-2. Coordenadas de Rindler¶
Problema:
Figura de referencia: Figura 2.1: Conos de luz y diagramas espacio-temporales (Capítulos 3–4)
{kind=link}
Para el elemento de línea del espacio-tiempo de Minkowski
se introducen las coordenadas de Rindler \((\eta, \xi)\) mediante
(las direcciones \(y\), \(z\) no se transforman).
(a) Calcula las componentes de la matriz jacobiana: \(\dfrac{\partial(ct)}{\partial \eta}\), \(\dfrac{\partial(ct)}{\partial \xi}\), \(\dfrac{\partial x}{\partial \eta}\), \(\dfrac{\partial x}{\partial \xi}\).
(b) Utilizando la ley de transformación del tensor métrico, demuestra que el elemento de línea en coordenadas de Rindler es
(c) La componente \(g_{\eta\eta} = -\xi^2\) de este tensor métrico depende de \(\xi\). Discute el significado físico de esto y cómo se relaciona con la discusión del principio de equivalencia (equivalence principle) en Cap. 5: "en un campo gravitatorio uniforme, el transcurso del tiempo varía según la posición".
(a) Componentes de la matriz jacobiana:
De \(ct = \xi\sinh\eta\), \(x = \xi\cosh\eta\):
(Las filas corresponden a \((ct, x)\) y las columnas a \((\eta, \xi)\))
(b) Derivación del elemento de línea en coordenadas de Rindler:
La métrica de Minkowski es \(g_{\mu\nu} = \text{diag}(-1, +1, +1, +1)\). Como las direcciones \(y\), \(z\) no se transforman, consideramos solo la parte \((ct, x)\).
Aplicamos la regla de transformación \(g'_{kl} = \dfrac{\partial x^\mu}{\partial u^k}\dfrac{\partial x^\nu}{\partial u^l}\,g_{\mu\nu}\).
Cálculo de \(g'_{\eta\eta}\):
Aquí se usó la identidad de funciones hiperbólicas \(\cosh^2\eta - \sinh^2\eta = 1\).
Cálculo de \(g'_{\xi\xi}\):
Cálculo de \(g'_{\eta\xi}\):
Como las direcciones \(y\), \(z\) no se transforman, \(g'_{yy} = 1\), \(g'_{zz} = 1\).
Por lo tanto:
Verificación: \(\det J = \xi\cosh^2\eta - \xi\sinh^2\eta = \xi\), por lo que es regular para \(\xi > 0\). Además, la línea de mundo con \(\xi = \text{const}\) satisface \(x^2 - c^2t^2 = \xi^2\), que es una hipérbola correspondiente a la línea de mundo de un movimiento uniformemente acelerado. ✓
(c) Análisis del significado físico:
Las coordenadas de Rindler describen el sistema de coordenadas de un observador en movimiento uniformemente acelerado con aceleración \(a = c^2/\xi\). Por el principio de equivalencia, este sistema de coordenadas es localmente equivalente a un sistema de coordenadas en reposo en un campo gravitatorio uniforme.
Significado físico de que \(g_{\eta\eta} = -\xi^2\) dependa de \(\xi\):
La relación entre el tiempo coordenado \(\eta\) y el tiempo propio \(\tau\) para un observador estático (\(d\xi = dy = dz = 0\)) es:
(En unidades con \(c = 1\): \(d\tau = \xi\,d\eta\))
Esto significa que aunque transcurra el mismo tiempo coordenado \(d\eta\), el tiempo propio transcurre de manera diferente en lugares con distinto valor de \(\xi\). Concretamente:
- En lugares con \(\xi\) grande ("arriba" en la dirección de la aceleración, por analogía gravitatoria donde el potencial gravitatorio es mayor) el tiempo propio transcurre más rápido
- En lugares con \(\xi\) pequeño ("abajo", donde el potencial gravitatorio es menor) el tiempo propio transcurre más lento
- Cuando \(\xi \to 0\), \(g_{\eta\eta} \to 0\) y el transcurso del tiempo propio se detiene (horizonte de Rindler)
Esto es precisamente una manifestación de la dilatación temporal gravitatoria (gravitational time dilation) discutida en Cap. 5. Según el principio de equivalencia, en un campo gravitatorio uniforme "el tiempo transcurre más rápido cuanto más alto se está". La dependencia en \(\xi\) de \(g_{\eta\eta} = -\xi^2\) en la métrica de Rindler expresa este efecto de manera precisa en el lenguaje del tensor métrico.
Relación con el corrimiento al rojo gravitatorio:
Si dos observadores situados en distintas posiciones \(\xi\) intercambian señales con el mismo intervalo de tiempo coordenado \(\Delta\eta\), sus respectivos intervalos de tiempo propio son \(\Delta\tau_1 = \xi_1\,\Delta\eta\) y \(\Delta\tau_2 = \xi_2\,\Delta\eta\). Cuando \(\xi_1 < \xi_2\), se tiene \(\Delta\tau_1 < \Delta\tau_2\), y la luz emitida desde "abajo" aparece corrida al rojo para el observador de "arriba". Este es el corrimiento al rojo gravitatorio (gravitational redshift), una consecuencia que se deriva directamente del principio de equivalencia.
Nota adicional: \(\xi = 0\) se denomina horizonte de Rindler y corresponde a una frontera causalmente inaccesible desde la perspectiva del observador uniformemente acelerado. Esto guarda analogía con el horizonte de sucesos de un agujero negro y constituye un modelo importante para comprender la física de horizontes en relatividad general.
Feedback on this page
Let us know if something was unclear, incorrect, or could be improved.