Apéndice D Fundamentos de teoría de grupos y simetría¶
Resumen de los capítulos anteriores: En Apéndice C aprendimos los fundamentos de tensores y geometría diferencial. Herramientas como el tensor métrico, la derivada covariante y el tensor de curvatura servían para describir la estructura geométrica del espaciotiempo. Sin embargo, en física existe otro principio poderoso además de la geometría: la «simetría». Todas las fuerzas del Modelo Estándar nacen de simetrías gauge, y en la teoría de cuerdas el álgebra de Virasoro y la supersimetría desempeñan papeles esenciales. Preparemos aquí el lenguaje matemático para tratar la simetría: la teoría de grupos.
Objetivos de este capítulo
- Comprender los fundamentos de la teoría de grupos —la herramienta para describir matemáticamente la «simetría»— partiendo del ejemplo concreto de las rotaciones de un triángulo equilátero
- Cubrir la definición de grupo, los grupos de Lie (\(U(1)\), \(SU(2)\), \(SU(3)\)), las álgebras de Lie y relaciones de conmutación de los generadores, el concepto de representación, el teorema de Noether, la simetría gauge y la derivada covariante, y la ruptura espontánea de simetría
- Con esto, poder seguir matemáticamente las discusiones de Cap. 9 (grupo gauge del Modelo Estándar), Cap. 16 (álgebra de Virasoro) y Cap. 17 (supersimetría)
🟡 Lina: Si en Cap. 9 apareció «\(SU(3) \times SU(2) \times U(1)\)» y pensaste «¿qué es eso?», empieza a leer desde aquí. Comenzaremos con un ejemplo cercano como la rotación de un triángulo equilátero, así que no te preocupes.
D.1 Por qué aprender teoría de grupos — La simetría es el lenguaje de la física¶
🟡 Lina: El papel de la simetría en la física es abrumadoramente grande. Recuerda la historia de cómo Maxwell unificó la electricidad y el magnetismo en Cap. 2. En Cap. 9 vimos que las 3 fuerzas del Modelo Estándar nacen de «simetrías gauge».
🔵 Kai: Es increíble que solo con «exigir» una simetría se determine la forma de la fuerza. Pero, ¿qué es concretamente la «simetría»? ¿Algo así como «forma bonita»?
🟡 Lina: Buena pregunta. Intuitivamente significa «hacer cierta operación sin que la física cambie». Pero para definir con precisión «no cambia», necesitamos un lenguaje matemático. Ese es la teoría de grupos (group theory).
⚪ Mei: Es decir, es la herramienta para tratar la simetría no como «intuición» sino como «ecuaciones».
🟡 Lina: Exacto. Y al usar la teoría de grupos, se hace posible lo siguiente:
- Derivar leyes de conservación a partir de simetrías (teorema de Noether)
- Determinar la forma de las fuerzas a partir de simetrías (principio gauge)
- Clasificar partículas mediante simetrías (teoría de representaciones)
- Describir el mecanismo por el que se rompe la simetría (ruptura espontánea de simetría)
🔵 Kai: ¿Cuatro cosas? La simetría es tan poderosa...
🟡 Lina: También en la teoría de cuerdas, la teoría de grupos aparece por todas partes: el álgebra de Virasoro (Cap. 16), el álgebra de supersimetría (Cap. 17), los grupos de dualidad (Cap. 18).
✅ Verificación de comprensión: Menciona 2 cosas que se hacen posibles al usar la teoría de grupos.
Respuesta
Por ejemplo, (1) derivar leyes de conservación a partir de simetrías (teorema de Noether), (2) determinar la forma de las fuerzas a partir de simetrías (principio gauge). También son correctas «clasificar partículas mediante simetrías (teoría de representaciones)» y «describir el mecanismo por el que se rompe la simetría (ruptura espontánea de simetría)».
✅ Verificación de comprensión: ¿Cómo se llama el lenguaje (herramienta) para describir matemáticamente la simetría?
Respuesta
Teoría de grupos (group theory).
D.2 ¿Qué es un grupo? — «Un conjunto de operaciones»¶
Primero un ejemplo concreto — Rotaciones de un triángulo equilátero¶
🟡 Lina: Como es difícil captar la idea partiendo directamente de la definición, comencemos con un ejemplo concreto.
Rotemos un triángulo equilátero alrededor de su centro (Fig. D.1「Simetría rotacional del triángulo equilátero」). ¿De cuántas formas podemos rotar el triángulo para que «se vea igual que el original»?
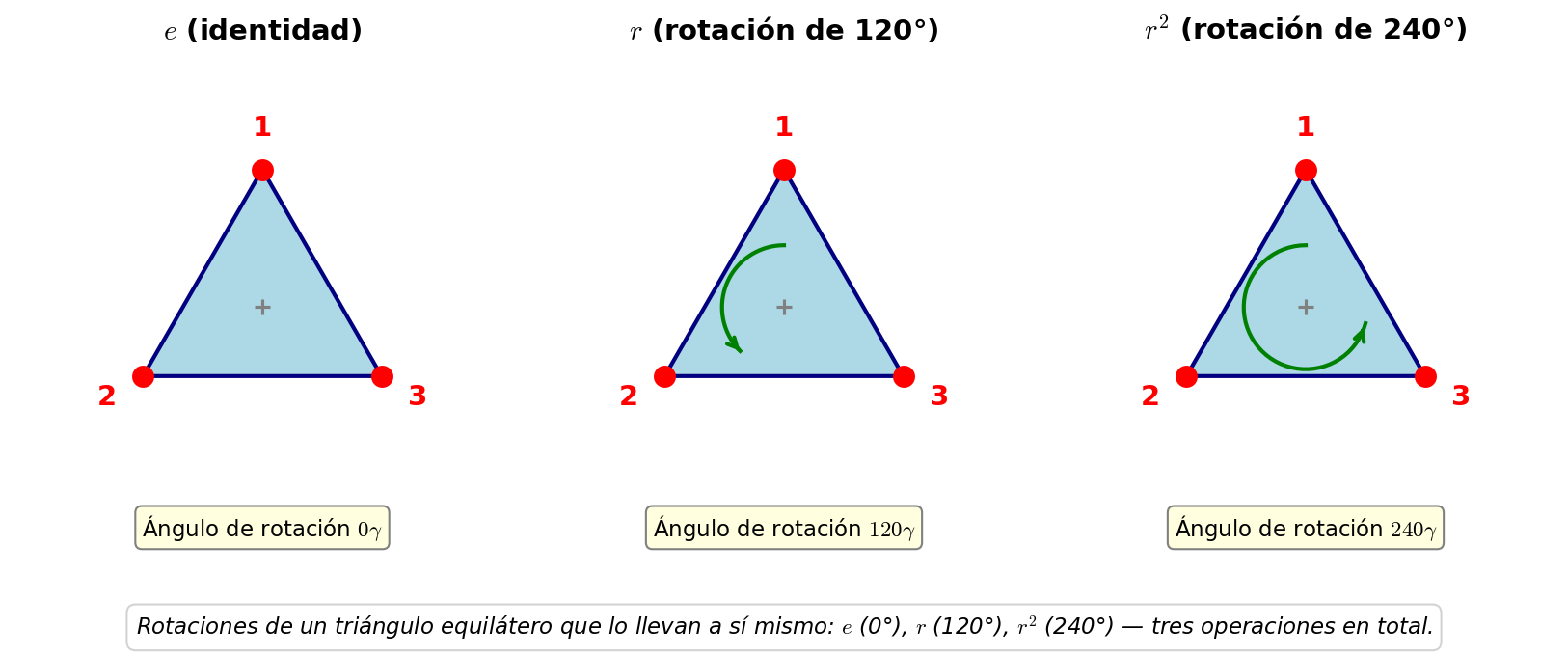
Fig. D.1: Simetría rotacional del triángulo equilátero. Figura D_1: Al rotar un triángulo equilátero alrededor de su eje central, las operaciones que lo dejan igual son \(e\) (0°), \(r\) (120°), \(r^2\) (240°).
- No rotar (0°) — lo escribimos como \(e\)
- Rotar 120° — lo escribimos como \(r\)
- Rotar 240° (= 120° dos veces) — lo escribimos como \(r^2\)
Una rotación de 360° vuelve al original, así que es lo mismo que \(e\). Es decir, «las rotaciones que hacen que el triángulo se vea igual» son solo 3: \(\{e, r, r^2\}\).
🔵 Kai: ¿Solo 3? Si fuera un círculo habría infinitas, ¿no?
🟡 Lina: Exacto, esa es la diferencia entre un «grupo discreto» y un «grupo continuo». Más adelante pasaremos a los grupos continuos. Primero, veamos las propiedades de estas 3 operaciones.
✅ Verificación de comprensión: Al rotar un triángulo equilátero alrededor de su eje central, ¿cuántas operaciones de rotación lo dejan «igual»?
Respuesta
- Rotación de 0° (\(e\)), rotación de 120° (\(r\)), rotación de 240° (\(r^2\)). La rotación de 360° es igual a la de 0°, así que no se cuenta por separado.
Estas 3 operaciones tienen propiedades interesantes:
- Hacer dos operaciones seguidas siempre da una de las 3. Por ejemplo, \(r\) seguida de \(r\) da \(r^2\). \(r\) seguida de \(r^2\) da \(e\) (vuelve al original). Nunca se sale de las 3
- Al hacer 3 seguidas, cambiar la agrupación da el mismo resultado. \((r \cdot r) \cdot r = r^2 \cdot r = e\) y \(r \cdot (r \cdot r) = r \cdot r^2 = e\) son lo mismo
- Existe la operación «no hacer nada» \(e\). Hacer \(e\) antes o después de cualquier cosa no cambia el resultado
- Toda operación tiene una que la «deshace». La que deshace \(r\) es \(r^2\) (\(r\) seguida de \(r^2\) da \(e\)). La que deshace \(r^2\) es \(r\)
⚪ Mei: Las 4 propiedades encajan perfectamente. Estas serán las condiciones de «grupo», ¿verdad?
En forma de tabla de multiplicar:
Tabla D.1: Tabla de multiplicar del grupo cíclico Z₃
| \(\cdot\) | \(e\) | \(r\) | \(r^2\) |
|---|---|---|---|
| \(e\) | \(e\) | \(r\) | \(r^2\) |
| \(r\) | \(r\) | \(r^2\) | \(e\) |
| \(r^2\) | \(r^2\) | \(e\) | \(r\) |
Definición — Extrayéndola del ejemplo concreto¶
🟡 Lina: La generalización de las 4 propiedades anteriores es la definición de grupo (group). Cuando un «conjunto de operaciones» \(G\) y una regla \(\cdot\) para realizar operaciones sucesivas satisfacen las siguientes 4 condiciones, llamamos grupo a \((G, \cdot)\):
- Clausura (closure): El resultado \(a \cdot b\) de realizar la operación \(a\) seguida de \(b\) también es una operación contenida en \(G\)
- Ejemplo del triángulo: \(r \cdot r = r^2 \in \{e, r, r^2\}\) ✓ — no se sale de las 3
- Asociatividad (associativity): \((a \cdot b) \cdot c = a \cdot (b \cdot c)\) — al hacer 3 operaciones seguidas, cambiar la agrupación da el mismo resultado
- Ejemplo del triángulo: \((r \cdot r) \cdot r = r \cdot (r \cdot r) = e\) ✓
- Elemento identidad (identity): Existe una operación «no hacer nada» \(e\) (\(e \cdot a = a \cdot e = a\))
- Ejemplo del triángulo: rotación de 0° \(e\) ✓
- Elemento inverso (inverse): Para toda operación \(a\) existe una operación \(a^{-1}\) que la «deshace» (\(a \cdot a^{-1} = e\))
- Ejemplo del triángulo: El inverso de \(r\) es \(r^2\) (\(r \cdot r^2 = e\)) ✓
Las rotaciones del triángulo equilátero \(\{e, r, r^2\}\) se llaman \(\mathbb{Z}_3\) (grupo cíclico de orden 3).
⚪ Mei: Si falta aunque sea una de las 4 condiciones, no es un grupo.
🔵 Kai: La asociatividad es básicamente «no hay que preocuparse por el orden de cálculo», ¿no? Como \((1+2)+3 = 1+(2+3)\) en la suma.
🟡 Lina: Como ejemplo es correcto. Pero hablando con precisión, la asociatividad es «cambiar la agrupación de paréntesis de 3 elementos da el mismo resultado». Si dices «no hay que preocuparse por el orden» puede confundirse con la «conmutatividad» (\(a \cdot b = b \cdot a\)). La conmutatividad es «intercambiar el orden de 2», que es algo distinto de la asociatividad. La conmutatividad no está entre las condiciones de grupo. Por ejemplo, los números naturales \(\{1, 2, 3, \ldots\}\) con la adición no forman un grupo. No existe un número natural que satisfaga \(3 + ? = 0\), así que la condición de inverso se viola.
✅ Verificación de comprensión: ¿Por qué el conjunto de los números naturales \(\{1, 2, 3, \ldots\}\) con la adición no forma un grupo?
Respuesta
Porque no existen elementos inversos. Por ejemplo, no hay un número natural que satisfaga \(3 + ? = 0\). De las 4 condiciones de grupo, se viola la condición de inverso.
¿Por qué «operaciones»?¶
🟡 Lina: El punto clave es pensar en un grupo como un «conjunto de operaciones» en vez de un «conjunto de números». En física, la simetría es «hacer cierta operación sin que la física cambie». El conjunto total de esas «operaciones» forma un grupo. En el ejemplo del triángulo, la simetría es que «al rotar 120° el triángulo se ve igual», y el conjunto total de operaciones de simetría \(\{e, r, r^2\}\) es el grupo.
📝 Ejercicios:
- Verificación de las condiciones de grupo → Problema B-1. Grupo aditivo de los enteros, Problema B-2. Grupo multiplicativo de los reales positivos, Problema B-3. La multiplicación de enteros no forma un grupo
✅ Verificación de comprensión: Enumera las 4 condiciones que constituyen la definición de grupo.
Respuesta
Clausura (closure), asociatividad (associativity), existencia de elemento identidad (identity), existencia de elemento inverso (inverse).
✅ Verificación de comprensión: En el grupo de rotaciones del triángulo equilátero \(\{e, r, r^2\}\), ¿cuál es el inverso de \(r\)?
Respuesta
\(r^2\). Porque \(r \cdot r^2 = e\) (vuelve al elemento identidad).
D.3 Grupos continuos (grupos de Lie) — Los protagonistas de la física¶
🟡 Lina: Las rotaciones del triángulo equilátero son «discretas» (en saltos de 120°). Pero si rotamos un círculo, podemos rotar cualquier ángulo. Los grupos etiquetados continuamente por parámetros se llaman grupos de Lie. Casi todos los grupos más importantes en física son grupos de Lie.
\(U(1)\): Rotación del círculo — Simetría de la fuerza electromagnética¶
Consideremos el conjunto de todos los números complejos \(e^{i\theta}\) (\(\theta\) es real). Su módulo es siempre 1 (\(|e^{i\theta}| = 1\)), así que representan rotaciones sobre el círculo unitario en el plano complejo.
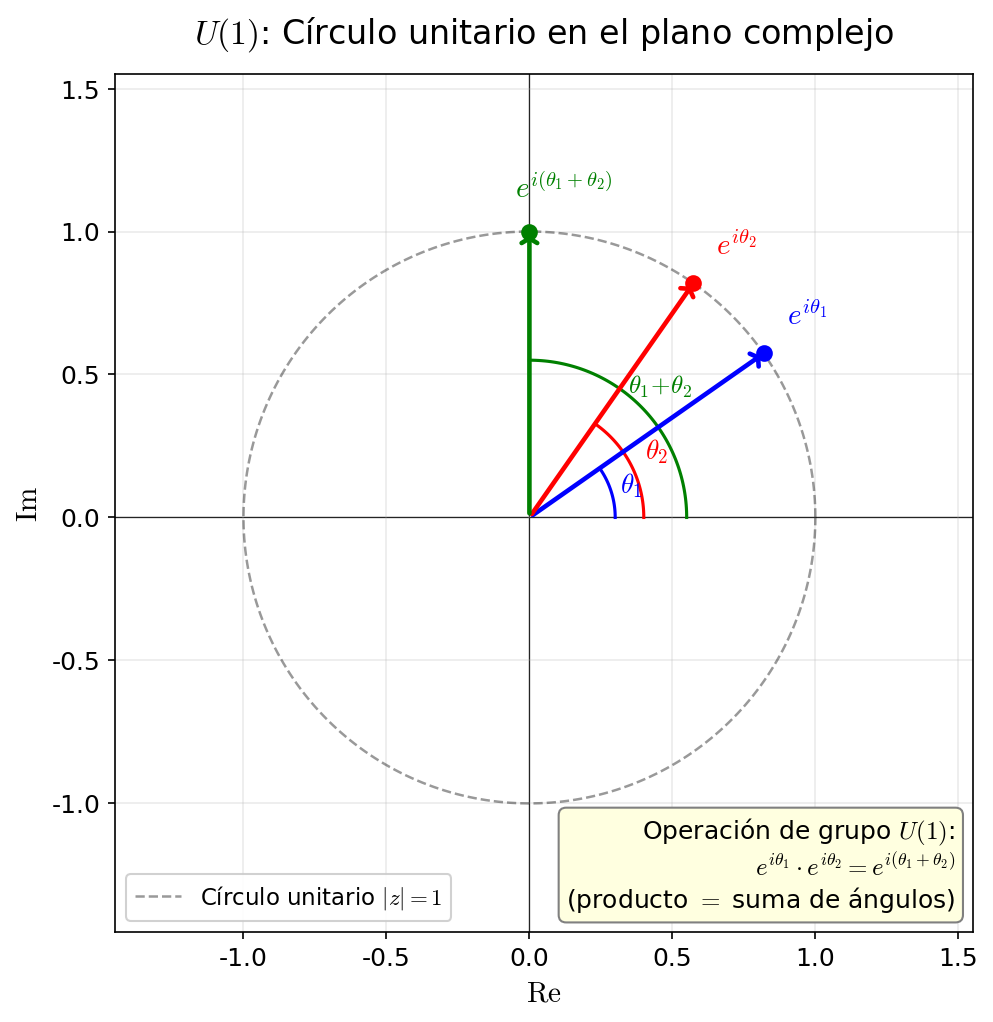
Fig. D.2: Círculo unitario en el plano complejo y U(1). Figura D_2: \(e^{i\theta}\) representa un punto sobre el círculo unitario del plano complejo. Al variar el ángulo \(\theta\) se mueve continuamente por el círculo.
Verifiquemos las condiciones de grupo:
Clausura: Calculemos el producto de dos elementos.
El lado derecho tiene la forma \(e^{i\theta}\) (\(\theta = \theta_1 + \theta_2\)), así que está contenido en \(U(1)\). ✓
Asociatividad: Para tres elementos,
Ambos son iguales. ✓
Identidad: Con \(\theta = 0\) tenemos \(e^{i \cdot 0} = 1\). Para cualquier elemento \(e^{i\theta}\): \(1 \cdot e^{i\theta} = e^{i\theta}\). ✓
Inverso: El inverso de \(e^{i\theta}\) es \(e^{-i\theta}\). Verificando,
✓
El parámetro es solo \(\theta\) → grupo de Lie de 1 dimensión.
🔵 Kai: Vaya, las 4 condiciones se verifican todas de un golpe. Es sencillo.
✅ Verificación de comprensión: ¿Para qué valor de \(\theta\) el elemento \(e^{i\theta}\) de \(U(1)\) es el elemento identidad del grupo? Además, ¿cuál es el inverso de \(e^{i\theta}\)?
Respuesta
Cuando \(\theta = 0\), \(e^{i \cdot 0} = 1\) es el elemento identidad. El inverso de \(e^{i\theta}\) es \(e^{-i\theta}\) (al multiplicarlos se obtiene \(e^0 = 1\)).
🔵 Kai: ¿Qué significa la «\(U\)» de \(U(1)\)?
🟡 Lina: Es la inicial de Unitary (unitario). Una matriz unitaria de \(1 \times 1\) es un número complejo que satisface \(|u|^2 = 1\), es decir, \(e^{i\theta}\). Por eso \(U(1)\) es el «grupo de matrices unitarias de \(1 \times 1\)».
📝 Ejercicios:
- Verificación de las condiciones de grupo de \(U(1)\) → Problema B-4. Condiciones de grupo de \(U(1)\)
Papel en la física (Cap. 9): Para la función de onda \(\psi\) de la mecánica cuántica, consideremos la transformación de fase \(\psi \to e^{i\theta}\psi\). Si exigimos que la física no cambie bajo esta transformación (\(|\psi|^2\) invariante), el fotón aparece automáticamente y se deriva la fuerza electromagnética. Este es el principio gauge (lo derivaremos en detalle en la sección D.7).
\(SO(2)\) y \(SO(3)\): Grupos de rotación¶
🟡 Lina: \(U(1)\) era la rotación de fase de números complejos, pero las «rotaciones del espacio», más familiares, también forman un grupo.
\(SO(2)\): Rotaciones en 2 dimensiones
La matriz que rota un vector \((x, y)\) un ángulo \(\theta\) en el plano bidimensional es:
Esta es una matriz ortogonal \(2 \times 2\) (\(R^T R = I\)) con determinante 1 (\(\det R = 1\)). El conjunto de todas estas matrices es \(SO(2)\).
Verifiquemos la clausura. La composición de dos rotaciones es:
Calculando el producto matricial (usando fórmulas de adición):
El resultado es de nuevo un elemento de \(SO(2)\). ✓
🔵 Kai: Oye, tanto \(SO(2)\) como \(U(1)\) tienen un solo parámetro y la estructura de «sumar ángulos», ¿no? Se parecen.
🟡 Lina: Buena observación. De hecho, \(SO(2)\) y \(U(1)\) son isomorfos como grupos (tienen la misma estructura). Existe la correspondencia \(e^{i\theta} \leftrightarrow R(\theta)\).
⚪ Mei: Es decir, aunque en apariencia una es «rotación de fase de números complejos» y la otra «matrices de rotación del plano», la estructura de multiplicación como grupos es exactamente la misma.
✅ Verificación de comprensión: ¿Qué relación tienen \(SO(2)\) y \(U(1)\)?
Respuesta
Son isomorfos como grupos (tienen la misma estructura). Existe la correspondencia \(e^{i\theta} \leftrightarrow R(\theta)\), y aunque en apariencia difieren —una es «rotación de fase de números complejos» y otra «matrices de rotación del plano»—, la estructura de multiplicación del grupo es exactamente la misma.
\(SO(3)\): Rotaciones en 3 dimensiones
Las rotaciones en el espacio tridimensional se representan con matrices ortogonales \(3 \times 3\) (\(R^T R = I\), \(\det R = 1\)). Tienen 3 parámetros (por ejemplo, los ángulos de Euler \(\alpha, \beta, \gamma\)).
Propiedad importante: \(SO(3)\) es no conmutativo. Es decir, el orden de las rotaciones importa.
🔵 Kai: Si tomas un libro y primero lo rotas 90° alrededor del eje \(x\), y luego 90° alrededor del eje \(z\), el resultado es diferente que si lo haces en orden inverso (Fig. D.3「No conmutatividad de las rotaciones SO(3)」).
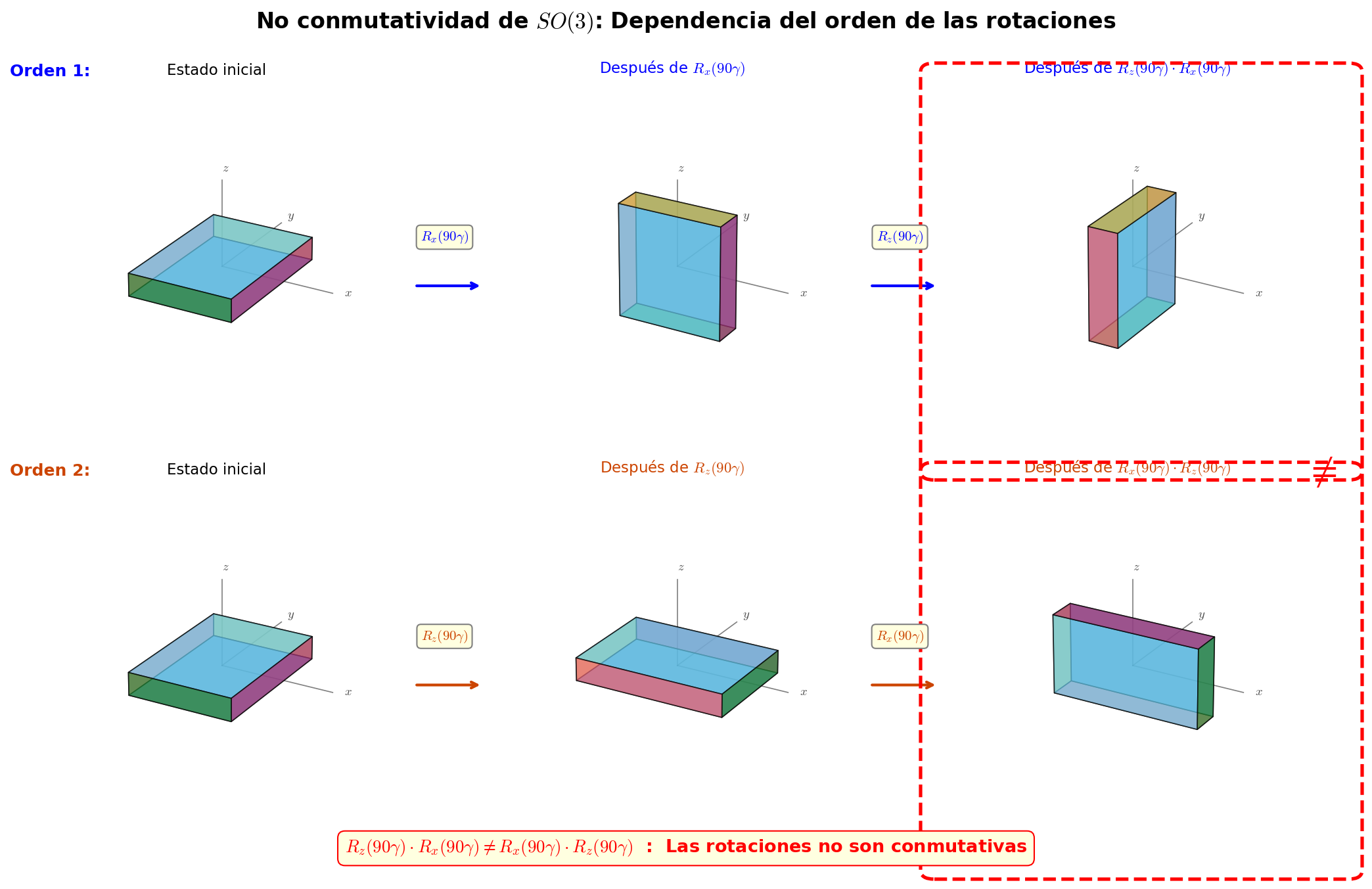
Fig. D.3: No conmutatividad de las rotaciones SO(3). Figura D_3: Las rotaciones en el espacio 3D cambian de resultado al intercambiar el orden (no conmutativas). Rotar un libro 90° alrededor del eje \(x\) → 90° alrededor del eje \(z\) da un resultado diferente al orden inverso.
🟡 Lina: Así es. En ecuaciones se escribe \(R_x(\pi/2) R_z(\pi/2) \neq R_z(\pi/2) R_x(\pi/2)\). Esta propiedad de que «el orden importa» es la esencia de los grupos no conmutativos, y es el punto de partida de la teoría de Yang-Mills (Teoría Cuántica de Campos Teoría Cuántica de Campos Cap. 17 referencia).
\(SU(2)\): Simetría de la fuerza débil¶
El conjunto de todas las matrices unitarias de \(2 \times 2\) (\(U^\dagger U = I\)) con determinante 1 (\(\det U = 1\)).
🔵 Kai: ¿Qué era «unitario»?
🟡 Lina: Que la inversa de la matriz es igual a su transpuesta conjugada (\(U^{-1} = U^\dagger\)). Si definimos el «módulo al cuadrado» de un vector con componentes complejas \(\mathbf{v} = (v_1, v_2)\) como \(|v_1|^2 + |v_2|^2\), al multiplicar por una matriz unitaria este módulo no cambia. Es la misma idea que cuando la longitud de un vector real \(\sqrt{x^2 + y^2}\) se conserva bajo matrices ortogonales (matrices de rotación), pero extendido a números complejos.
Tiene 3 parámetros → grupo de Lie de 3 dimensiones.
🔵 Kai: ¿Cómo se sabe que son 3?
🟡 Lina: Contemos. Una matriz compleja de \(2 \times 2\) tiene 8 parámetros reales (cada componente es un número complejo con parte real e imaginaria, 2 cada una, 4 componentes dan \(2 \times 4 = 8\)). La condición unitaria \(U^\dagger U = I\), ¿cuántas condiciones reales impone?
🔵 Kai: \(U^\dagger U\) es una matriz \(2 \times 2\), así que las 4 componentes deben ser iguales a las de \(I\)... 4 igualdades de números complejos, ¿o sea 8 condiciones reales?
🟡 Lina: A primera vista parece eso. Pero resulta que \(U^\dagger U\) tiene una propiedad especial. \((U^\dagger U)^\dagger = U^\dagger (U^\dagger)^\dagger = U^\dagger U\), así que \(U^\dagger U\) es una matriz hermítica (una matriz que satisface \(H^\dagger = H\)). Las componentes de una matriz hermítica tienen restricciones, así que las 4 igualdades no son todas independientes.
🔵 Kai: ¿Qué cambia si es hermítica?
🟡 Lina: Una matriz hermítica tiene componentes diagonales reales (\(H_{ii}^* = H_{ii}\)), y las componentes fuera de la diagonal están determinadas mutuamente por \(H_{ji} = H_{ij}^*\). Es decir, si decides la parte triangular superior (\(i < j\)), la inferior queda automáticamente determinada, así que las componentes fuera de la diagonal independientes son solo \(n(n-1)/2\) números complejos de la parte triangular superior.
🔵 Kai: Ah, la parte triangular inferior es la conjugada compleja de la superior, así que solo se puede elegir libremente la mitad.
🟡 Lina: Exacto. Para el caso \(n \times n\), la diagonal tiene \(n\) números reales, y fuera de la diagonal hay \(n(n-1)/2\) números complejos independientes (= \(n(n-1)\) números reales), así que las componentes reales independientes de una matriz hermítica son \(n + n(n-1) = n^2\). La ecuación «matriz hermítica \(n \times n\) = matriz identidad» significa que cada una de las \(n^2\) componentes reales independientes del lado izquierdo es igual a la componente correspondiente de la matriz identidad (diagonal 1, fuera de la diagonal 0), dando \(n^2\) igualdades de números reales independientes. Para \(2 \times 2\) son \(2^2 = 4\). No 8, sino 4.
⚪ Mei: Ya veo, gracias a la propiedad hermítica el número de condiciones se reduce a menos de la mitad.
🔵 Kai: Espera, entiendo que con la condición hermítica quedan 4 condiciones. Pero lo de «con \(\det U = 1\) se pierde 1 más», ¿es que la condición del determinante vale 1 parámetro real? ¿El determinante no es un número complejo?
🟡 Lina: Buena duda. El determinante de una matriz unitaria satisface automáticamente \(|\det U| = 1\) (es decir, \(\det U = e^{i\theta}\) con módulo necesariamente 1). Así que \(\det U = 1\) solo añade una condición real extra: «\(\theta = 0\)». Por tanto \(8 - 4 = 4\), y luego \(4 - 1 = 3\).
⚪ Mei: Es decir, de los 8 parámetros reales se restan 4 por la condición unitaria y 1 por la condición del determinante, quedando 3.
🟡 Lina: Exacto. El elemento general de \(SU(2)\) se puede escribir como:
Donde \(\alpha, \beta\) son números complejos. Calculando el determinante (el determinante de una matriz \(2 \times 2\) \(\begin{pmatrix}a&b\\c&d\end{pmatrix}\) es \(ad - bc\)): \(\det U = \alpha \cdot \alpha^* - (-\beta^*) \cdot \beta = |\alpha|^2 + |\beta|^2 = 1\) ✓. \(\alpha\) y \(\beta\) juntos tienen 4 parámetros reales, pero con la condición \(|\alpha|^2 + |\beta|^2 = 1\) se pierde 1, así que los parámetros reales independientes son efectivamente 3.
✅ Verificación de comprensión: Explica por qué el número de parámetros de \(SU(2)\) es 3, contando las condiciones.
Respuesta
Una matriz compleja \(2 \times 2\) tiene 8 parámetros reales. La condición unitaria \(U^\dagger U = I\) impone 4 condiciones reales, y \(\det U = 1\) resta 1 más. Por tanto \(8 - 4 - 1 = 3\).
📝 Ejercicios:
- Cálculo concreto de un elemento de \(SU(2)\) a partir de las matrices de Pauli → Problema M-1. Representación exponencial de elementos de \(SU(2)\)
Relación entre \(SU(2)\) y \(SO(3)\):
\(SU(2)\) y \(SO(3)\) están estrechamente relacionados. Los dos elementos \(U\) y \(-U\) de \(SU(2)\) corresponden al mismo elemento de \(SO(3)\) (correspondencia 2 a 1). Este es el origen matemático de la curiosa propiedad de que «una partícula de espín \(1/2\) cambia de signo con una rotación de \(360°\) y vuelve al original con \(720°\)» (Mecánica Cuántica Mecánica Cuántica Cap. 17 referencia).
Papel en la física: - Descripción de rotaciones del espacio tridimensional (reglas de transformación para partículas de espín \(1/2\)) - Grupo gauge de la fuerza débil en Cap. 9 (aquí no son rotaciones espaciales sino transformaciones de los estados internos de las partículas)
Estos dos comparten la misma estructura matemática \(SU(2)\), pero físicamente son simetrías completamente distintas. Que el mismo grupo aparezca en contextos diferentes es una manifestación de la universalidad de la teoría de grupos.
📝 Ejercicios:
- Regla de composición de matrices de rotación 3D → Problema B-5. Rotación 3D alrededor del eje \(z\)
\(SU(3)\): Simetría de la fuerza fuerte¶
El conjunto de todas las matrices unitarias de \(3 \times 3\) con determinante 1. Contemos los parámetros:
Una matriz compleja de \(3 \times 3\) tiene \(3 \times 3 = 9\) componentes complejas, cada una con parte real e imaginaria, dando \(2 \times 9 = 18\) parámetros reales. La condición unitaria \(U^\dagger U = I\) impone \(3^2 = 9\) condiciones reales (mismo argumento que para \(SU(2)\): \(U^\dagger U\) es hermítica, así que sus componentes reales independientes son \(n^2\)). Con \(\det U = 1\) se resta 1 más. Por tanto \(18 - 9 - 1 = 8\) parámetros.
🔵 Kai: La misma forma de contar que para \(SU(2)\), solo que el tamaño es mayor. Empiezo a ver el patrón.
Papel en la física (Cap. 9): Los quarks tienen 3 estados de «color» (rojo, verde, azul). \(SU(3)\) es la transformación entre estos 3 colores. Al exigir que la física no cambie bajo transformaciones de color, 8 tipos de gluones aparecen automáticamente y se deriva la fuerza fuerte.
Grupo de Lorentz \(SO(1,3)\)¶
🟡 Lina: Voy a presentar otro grupo importante en física. El grupo de Lorentz \(SO(1,3)\) es el grupo de transformaciones que preservan la métrica de Minkowski \(\eta_{\mu\nu} = \text{diag}(-1,+1,+1,+1)\). Con 3 rotaciones espaciales y 3 boosts (transformaciones de velocidad), tiene 6 parámetros.
Para más detalles, consulta Teoría Cuántica de Campos Teoría Cuántica de Campos Apéndice B (teoría de representaciones del grupo de Lorentz y el grupo de Poincaré). En este libro discutimos la invariancia de Lorentz en Cap. 5.
Resumen: El grupo gauge del Modelo Estándar¶
Tabla D.2: Grupo gauge del Modelo Estándar y partículas mediadoras
| Grupo | Número de parámetros | Fuerza correspondiente | Número de partículas mediadoras |
|---|---|---|---|
| \(SU(3)\) | 8 | Fuerza fuerte | 8 (gluones) |
| \(SU(2)\) | 3 | Fuerza débil | 3 (\(W^+, W^-, Z\)) |
| \(U(1)\) | 1 | Fuerza electromagnética | 1 (fotón) |
%%{init: {"theme": "default", "themeCSS": ".edgePath .path, .flowchart-link { stroke-width: 2px !important; }"}}%%
flowchart LR
SM["Grupo gauge del Modelo Estándar<br/>SU(3) × SU(2) × U(1)"] --> SU3["SU(3)<br/>8 parámetros"]
SM --> SU2["SU(2)<br/>3 parámetros"]
SM --> U1["U(1)<br/>1 parámetro"]
SU3 --> G["Fuerza fuerte<br/>8 gluones"]
SU2 --> W["Fuerza débil<br/>W⁺, W⁻, Z"]
U1 --> P["Fuerza electromagnética<br/>Fotón γ"]
style SM fill:#f9f,stroke:#333
style G fill:#fdd,stroke:#c33
style W fill:#ddf,stroke:#33c
style P fill:#dfd,stroke:#3c3Fig. D.4: Correspondencia entre el grupo gauge del Modelo Estándar y las partículas mediadoras
⚪ Mei: No es coincidencia que el número de partículas mediadoras coincida exactamente con el número de parámetros, ¿verdad?
🟡 Lina: Exacto. Para cada parámetro (generador) del grupo gauge existe 1 partícula mediadora. Esto es una consecuencia del principio gauge que veremos en la sección D.7.
📝 Ejercicios:
- Derivación del número de parámetros de \(SU(N)\) → Problema M-3. Número de parámetros de \(SU(N)\)
✅ Verificación de comprensión: ¿Cuántos parámetros tiene \(U(1)\) y a qué fuerza corresponde en el Modelo Estándar?
Respuesta
Tiene 1 parámetro (el ángulo \(\theta\)) y corresponde a la fuerza electromagnética.
✅ Verificación de comprensión: ¿Cuántos parámetros tiene \(SU(3)\) y cuáles son las partículas mediadoras correspondientes?
Respuesta
Tiene 8 parámetros, y las partículas mediadoras correspondientes son los 8 tipos de gluones.
D.4 Álgebra de Lie — El álgebra de «transformaciones infinitesimales»¶
Motivación: De transformaciones finitas a infinitesimales¶
🟡 Lina: Manejar directamente los elementos de un grupo de Lie (transformaciones finitas) es complicado. Por ejemplo, los elementos de \(SU(2)\) son matrices unitarias \(2 \times 2\), pero hacer productos de matrices cada vez es tedioso. Sin embargo, si miramos solo las transformaciones infinitesimales cerca de la identidad, podemos entender la mayor parte de la estructura del grupo.
🔵 Kai: ¿Por qué con solo «lo cercano» se puede conocer el todo?
🟡 Lina: Hagamos una analogía. Cuando quieres saber la forma de la Tierra, no necesitas verla entera de una vez. Si examinas la curvatura del suelo bajo tus pies (información local), puedes deducir que la Tierra es una esfera. El álgebra de Lie corresponde a esa «curvatura bajo los pies». Matemáticamente, las transformaciones finitas se pueden recuperar como «exponenciales» de las transformaciones infinitesimales (Fig. D.5「Relación entre grupo de Lie y álgebra de Lie」).
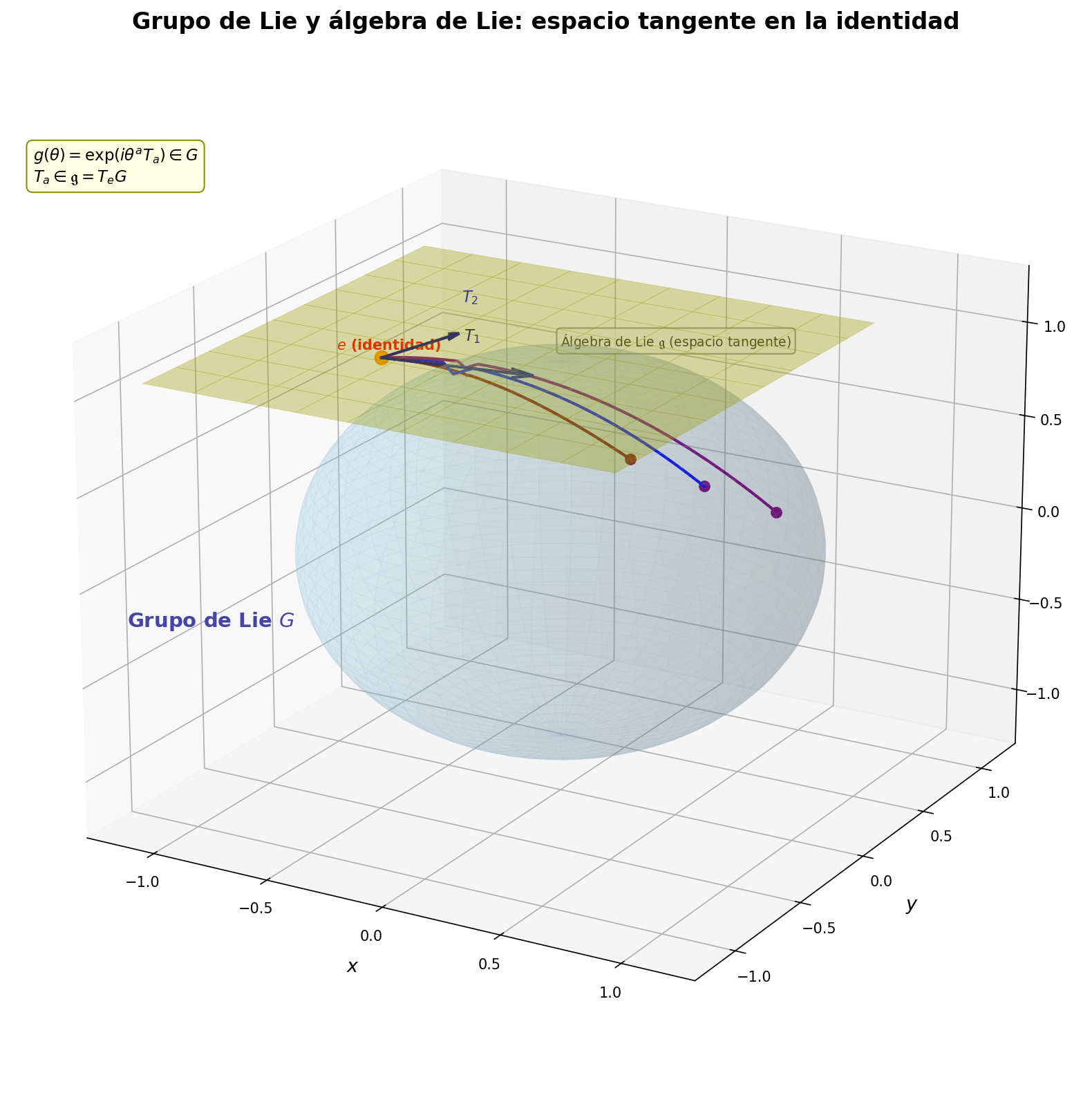
Fig. D.5: Relación entre grupo de Lie y álgebra de Lie. Figura D_4: El grupo de Lie tiene una estructura como una superficie, y el espacio tangente en la identidad \(e\) corresponde al álgebra de Lie. Los generadores son «direcciones de desplazamiento» (vectores tangentes) en la identidad, y mediante la función exponencial (\(e^{i\theta^a T_a}\)) se recuperan las transformaciones finitas.
Transformaciones infinitesimales y definición de generadores¶
Expandamos la matriz de rotación \(R(\theta)\) de \(SO(2)\) para el caso en que \(\theta\) es muy pequeño:
Cuando \(\theta \ll 1\), \(\cos\theta \approx 1 - \theta^2/2 \approx 1\), \(\sin\theta \approx \theta\), así que:
Organizando:
Esta \(J\) es el generador de \(SO(2)\). Una matriz que especifica la «dirección de desplazamiento» desde la identidad.
⚪ Mei: ¿Se puede recuperar la rotación finita \(R(\theta)\) a partir del generador \(J\)?
🟡 Lina: Sí. Usando la función exponencial:
Verifiquémoslo. La exponencial matricial se define por su desarrollo de Taylor:
Calculemos \(J^2\):
Por tanto \(J^3 = J^2 \cdot J = -J\), \(J^4 = J^2 \cdot J^2 = I\), ... ¡Es el mismo patrón que \(i^2 = -1\)!
🔵 Kai: Vaya, al aplicar \(J\) repetidamente se cicla \(I, J, -I, -J, I, \ldots\). Es la misma estructura que la unidad imaginaria.
🟡 Lina: Exacto. Organizando la expansión:
Efectivamente se recupera \(R(\theta)\).
✅ Verificación de comprensión: Escribe la relación entre el generador \(J\) y la transformación finita \(R(\theta)\) como una ecuación.
Respuesta
\(R(\theta) = e^{\theta J}\). La transformación finita se recupera como exponencial del generador. La exponencial matricial se define por el desarrollo de Taylor \(e^{\theta J} = I + \theta J + (\theta J)^2/2! + \cdots\).
Caso general de un grupo de Lie¶
En general, al expandir un elemento de un grupo de Lie cerca de la identidad:
Aquí el superíndice \(a\) de \(\epsilon^a\) no es una potencia sino una etiqueta para «el \(a\)-ésimo parámetro» (se numeran como \(\epsilon^1, \epsilon^2, \ldots\)). Los \(T_a\) (\(a = 1, 2, \ldots, n\)) son los generadores. \(n\) es el número de parámetros del grupo (la dimensión del grupo). \(i\epsilon^a T_a\) es la abreviatura de \(\sum_{a=1}^n i\epsilon^a T_a\). Con el mismo espíritu que la convención de suma de Einstein aprendida en Apéndice C (cuando el mismo índice aparece arriba y abajo se suma), los índices repetidos se suman.
::: {.callout-warning}
Convención para índices del espacio interno del grupo¶
Para los índices del espacio interno del grupo (\(a, b, c\), etc.), como la métrica es \(\delta_{ab}\) (matriz identidad), no hay significado físico en la distinción entre superíndice y subíndice. Por eso, según la literatura, se puede escribir \(f_{abc}\) todo con subíndices, o mezclar arriba y abajo como \(\epsilon^a T_a\). En este capítulo adoptamos la convención flexible de «cuando aparece un índice repetido (sin importar si está arriba o abajo), se suma». Esto difiere de la convención para los índices del espaciotiempo (\(\mu, \nu\), etc.) donde se distingue estrictamente arriba y abajo usando la métrica de Minkowski \(\eta_{\mu\nu}\), así que hay que tener cuidado. En caso de duda, se puede leer haciendo explícita la \(\sum\). :::
🔵 Kai: Espera un momento, ¿por qué hay un \(i\) delante?
🟡 Lina: Poner \(i\) delante es una convención de la física para hacer que los generadores sean hermíticos. Verifiquemos por qué \(i\) los hace hermíticos: para que \(U \approx I + i\epsilon^a T_a\) sea unitario (\(U^\dagger U = I\)), necesitamos que el producto con \(U^\dagger = I - i\epsilon^a T_a^\dagger\) sea \(I\). A primer orden \(U^\dagger U \approx I + i\epsilon^a(T_a - T_a^\dagger) = I\), así que se necesita \(T_a = T_a^\dagger\) (hermítico).
🔵 Kai: ¿Qué ventaja tiene que sean hermíticos?
🟡 Lina: Una matriz hermítica es aquella que satisface \(T_a^\dagger = T_a\) (la transpuesta conjugada es igual al original). Los autovalores de una matriz hermítica son siempre reales.
🔵 Kai: ¿Qué eran los autovalores? ¿Algo de las matrices que es bueno que sea real?
🟡 Lina: Un autovalor es un escalar \(\lambda\) que satisface \(A\mathbf{v} = \lambda\mathbf{v}\) para una matriz \(A\) (\(\mathbf{v} \neq \mathbf{0}\) se llama autovector). Cuando aplicas una matriz a un vector, en general cambian tanto la dirección como la magnitud. Pero para vectores especiales \(\mathbf{v}\), la dirección no cambia y solo la magnitud se multiplica por \(\lambda\) — ese factor \(\lambda\) es el autovalor. Por ejemplo, multiplicar la matriz \(\begin{pmatrix}3&0\\0&1\end{pmatrix}\) por el vector \(\begin{pmatrix}1\\0\end{pmatrix}\) da \(\begin{pmatrix}3\\0\end{pmatrix}\). La dirección es la misma y la magnitud se triplica — así que el autovalor es 3. En mecánica cuántica, los valores obtenidos al medir magnitudes físicas (energía, espín, etc.) coinciden con los autovalores del operador correspondiente. Por eso que los autovalores sean reales garantiza que «los resultados de medición son reales».
🔵 Kai: Entiendo, al poner \(i\) el generador se vuelve hermítico, y sus autovalores son reales — es decir, se convierten en valores que salen en las mediciones.
🟡 Lina: Exacto. En el ejemplo anterior de \(SO(2)\) escribimos \(R(\theta) \approx I + \theta J\) sin \(i\). Esa es la convención matemática. Para ajustarnos a la convención física, definimos \(T = -iJ\) y escribimos \(R(\theta) = e^{i\theta T}\) (\(iT = J\) así que \(e^{i\theta T} = e^{\theta J}\), es lo mismo). También se puede verificar que \(T\) es hermítico: \(J\) es una matriz real y antisimétrica (\(J^T = -J\)), así que \(T^\dagger = (-iJ)^\dagger = (-i)^* J^\dagger = i J^T = i(-J) = -iJ = T\) ✓ (aquí usamos \((-i)^* = i\), que \(J\) es real por lo que \(J^\dagger = J^T\), y que \(J^T = -J\) (antisimétrica)).
De aquí en adelante unificamos con la convención física (con \(i\)). Es decir, escribimos los elementos de un grupo de Lie general como \(U = e^{i\theta^a T_a}\), y para infinitesimal \(U \approx I + i\epsilon^a T_a\). En el ejemplo anterior de \(SO(2)\), \(R(\theta) = e^{\theta J} = e^{i\theta T}\) (\(T = -iJ\)) es la reescritura correspondiente a la convención física.
La transformación finita mediante la función exponencial:
🔵 Kai: Espera, ¿\(\theta^a\) no es \(\theta\) elevado a la potencia \(a\)? Como está escrito arriba parece una potencia.
🟡 Lina: Es confuso, lo sé. Aquí \(\theta^a\) significa «el \(a\)-ésimo parámetro», el superíndice es simplemente una etiqueta. No es una potencia. Y \(\theta^a T_a = \sum_{a=1}^n \theta^a T_a\) es la convención de que cuando el mismo índice \(a\) aparece como superíndice (\(\theta^a\)) y subíndice (\(T_a\)), se suma — la misma convención de suma de Einstein aprendida en Apéndice C aplicada también a los índices del espacio interno del grupo. Es algo distinto de los índices del espaciotiempo \(\mu, \nu\), pero la convención «índices repetidos se suman» es común. Hasta que te acostumbres, puedes leer haciendo explícita la \(\sum\).
⚪ Mei: Es decir, el superíndice \(a\) de \(\theta^a\) no es una potencia sino una etiqueta, y cuando el mismo índice aparece arriba y abajo se suma — la misma convención que en Apéndice C.
✅ Verificación de comprensión: ¿Cuál es la razón física para poner la unidad imaginaria \(i\) delante de los generadores \(T_a\) al expandir un elemento de un grupo de Lie cerca de la identidad?
Respuesta
Para hacer que los generadores sean hermíticos (\(T_a^\dagger = T_a\)). Como los autovalores de las matrices hermíticas son reales, resulta fácil hacer corresponder los generadores con magnitudes físicas observables (momento angular, etc.).
Relaciones de conmutación y constantes de estructura¶
🟡 Lina: Aquí viene el núcleo. Las relaciones de conmutación entre generadores definen el álgebra de Lie.
En el lado derecho se suma sobre el índice \(c\) (\(if_{abc}T_c = i\sum_c f_{abc}T_c\), por la convención de suma de índices internos del grupo mencionada antes). Los \(f_{abc}\) son las constantes de estructura — valores numéricos que determinan la «forma» del grupo.
🔵 Kai: ¿Por qué son importantes las relaciones de conmutación?
🟡 Lina: El conmutador mide si el resultado de «hacer \(A\) y luego \(B\)» es diferente del de «hacer \(B\) y luego \(A\)».
- \([A, B] = 0\): Intercambiar el orden da lo mismo (conmutativo)
- \([A, B] \neq 0\): El orden importa (no conmutativo)
\(U(1)\) es conmutativo (la suma de ángulos no depende del orden). \(SU(2)\) y \(SU(3)\) son no conmutativos.
⚪ Mei: Es decir, si la relación de conmutación no es \(0\) es no conmutativo, y la «magnitud del desfase» está cuantificada como la constante de estructura \(f_{abc}\).
🔵 Kai: Pero la relación de conmutación es «el desfase al intercambiar el orden de 2 generadores», ¿no? ¿No es poca información para conocer toda la estructura del grupo?
🟡 Lina: Buena intuición. Pero en realidad es suficiente. La razón es esta: cualquier elemento del grupo se puede escribir como \(e^{i\theta^a T_a}\). Al calcular el producto de dos elementos \(e^{i\theta^a T_a} e^{i\phi^b T_b}\), al expandir las exponenciales aparecen productos de generadores como \(T_a T_b\). Como se puede reescribir \(T_a T_b = T_b T_a + [T_a, T_b]\), si conoces las relaciones de conmutación puedes reorganizar todos los productos. Es decir, las relaciones de conmutación determinan completamente las «reglas de multiplicación» de los generadores, y estas contienen toda la información del grupo.
✅ Verificación de comprensión: Cuando se cumple la relación de conmutación \([T_a, T_b] = 0\), ¿qué propiedad tienen las dos operaciones?
Respuesta
Intercambiar el orden de las operaciones da el mismo resultado (conmutativas). Hacer \(T_a\) primero y luego \(T_b\), o en orden inverso, da el mismo resultado.
Cálculo concreto: Álgebra de Lie de \(SU(2)\)¶
🟡 Lina: Calculemos concretamente los generadores de \(SU(2)\). Hay 3 generadores: \(T_i = \sigma_i / 2\) (\(\sigma_i\) son las matrices de Pauli).
Calculemos \([T_1, T_2]\). Como \(T_i = \sigma_i/2\):
Calculemos \(\sigma_1 \sigma_2\):
Calculemos \(\sigma_2 \sigma_1\):
Por tanto:
🔵 Kai: ¡Vaya, sale \(iT_3\) limpiamente!
🟡 Lina: Realizando cálculos similares para las otras combinaciones, en general:
Donde \(\varepsilon_{ijk}\) es el símbolo de Levi-Civita (\(\varepsilon_{123} = 1\), permutaciones pares dan \(+1\), impares \(-1\), si hay dos o más índices iguales es \(0\)). Permutación par e impar: tomando \(123\) como referencia, si repites intercambios de dos índices cualesquiera para llegar al orden deseado y el número de intercambios es par, es permutación par; si es impar, es permutación impar. Por ejemplo, \(231\) se obtiene de \(123 \to 213\) (intercambio de 1 y 2) \(\to 231\) (intercambio de 1 y 3), con 2 intercambios, así que es permutación par (\(\varepsilon_{231} = +1\)); \(132\) se obtiene de \(123 \to 132\) (intercambio de 2 y 3) con 1 intercambio, así que es permutación impar (\(\varepsilon_{132} = -1\)).
🟡 Lina: Es decir, las constantes de estructura de \(SU(2)\) son \(f_{ijk} = \varepsilon_{ijk}\). Y esto tiene exactamente la misma forma que las relaciones de conmutación del momento angular. Quien haya aprendido en mecánica cuántica (Mecánica Cuántica Mecánica Cuántica Cap. 15) las relaciones de conmutación del espín \([J_i, J_j] = i\hbar\varepsilon_{ijk}J_k\), ya conocía el álgebra de Lie de \(SU(2)\) (en unidades con \(\hbar = 1\)). Por cierto, la estructura cíclica \([T_1, T_2] = iT_3\), \([T_2, T_3] = iT_1\), \([T_3, T_1] = iT_2\) sigue el mismo patrón que el producto vectorial \(\hat{x} \times \hat{y} = \hat{z}\).
⚪ Mei: Ya veo, en la definición general \([T_a, T_b] = if_{abc}T_c\), las \(f_{abc}\) para \(SU(2)\) son concretamente \(\varepsilon_{ijk}\). Como tiene la misma estructura cíclica que el producto vectorial, basta recordar \([T_1, T_2] = iT_3\) y el resto sale rotando los índices.
🟡 Lina: Exacto. Esta es el álgebra de Lie de \(SO(3)\) / \(SU(2)\). Los operadores de momento angular \(J_i\) de la mecánica cuántica (con \(J_i = T_i\) en unidades \(\hbar = 1\)) satisfacen exactamente las mismas relaciones de conmutación. Escribiéndolas explícitamente:
✅ Verificación de comprensión: ¿A qué son iguales las constantes de estructura \(f_{ijk}\) de \(SU(2)\)?
Respuesta
Al símbolo de Levi-Civita \(\varepsilon_{ijk}\). \(\varepsilon_{123} = 1\), permutaciones pares dan \(+1\), impares \(-1\), si hay índices repetidos da \(0\).
📝 Ejercicios:
- Cálculo de relaciones de conmutación de matrices de Pauli → Problema B-6. Relación de conmutación de las matrices de Pauli \([\sigma_1, \sigma_2]\), Problema B-7. Relaciones de conmutación de las matrices de Pauli (todas las combinaciones), Antisimetría del conmutador e identidad de Jacobi → Problema B-8. Antisimetría del conmutador, Problema M-2. Identidad de Jacobi (verificación con matrices de Pauli)
Propiedades de las constantes de estructura¶
Las constantes de estructura \(f_{abc}\) tienen propiedades importantes:
Antisimetría: De la definición de la relación de conmutación \([T_a, T_b] = -[T_b, T_a]\),
Es decir, al intercambiar los dos primeros índices cambia el signo.
Identidad de Jacobi: Para cualesquiera 3 generadores,
Esto también se puede escribir en términos de constantes de estructura (los índices se complican, así que aquí solo mostramos el resultado):
(Se suma sobre el índice \(e\). \(a, b, c, d\) son índices libres.) No usaremos directamente esta expresión en este capítulo, pero la identidad de Jacobi es una condición de consistencia para que el álgebra de Lie esté bien definida matemáticamente, y también juega un papel importante para garantizar que la teoría gauge sea físicamente consistente (por ejemplo, la conservación de la probabilidad).
✅ Verificación de comprensión: ¿Qué es la antisimetría de las constantes de estructura \(f_{abc}\)?
Respuesta
Que al intercambiar los dos primeros índices cambia el signo: \(f_{abc} = -f_{bac}\). Esto se sigue directamente de la definición de la relación de conmutación \([T_a, T_b] = -[T_b, T_a]\).
Álgebra de Virasoro (anticipo del capítulo 16)¶
🟡 Lina: Voy a presentar también, como anticipo, un álgebra de Lie que aparece en la teoría conforme de campos de la teoría de cuerdas. Aquí basta con captar la idea general.
Los generadores \(L_n\) (donde \(n\) es un entero) que describen la simetría (simetría conforme) sobre la hoja de mundo de la cuerda son infinitos. Sus relaciones de conmutación son:
Donde \(\delta_{m+n,0}\) es la delta de Kronecker (\(1\) si \(m + n = 0\), \(0\) en caso contrario). El primer término \((m-n)L_{m+n}\) tiene una estructura similar a \([T_i, T_j] = i\varepsilon_{ijk}T_k\) de \(SU(2)\) en el sentido de que «la relación de conmutación de dos generadores es una combinación lineal de otro generador». Pero el segundo término es nuevo. \(c\) se llama carga central, una característica que no existe en las álgebras de Lie de dimensión finita (como \(SU(2)\)). Este término es la causa de que la dimensión del espaciotiempo en la teoría de cuerdas se restrinja a \(D = 26\) (cuerda bosónica) o \(D = 10\) (supercuerda). Se estudia en detalle en Cap. 14, Cap. 16.
🔵 Kai: Infinitos generadores... eso es una escala completamente diferente a los 3 de \(SU(2)\)...
🟡 Lina: Por eso la teoría de cuerdas tiene una estructura tan rica. Por ahora basta con saber «que existe algo así».
✅ Verificación de comprensión: ¿Cómo se llaman las \(f_{abc}\) que aparecen en la relación de conmutación \([T_a, T_b] = if_{abc}T_c\) de los generadores \(T_a\) que definen un álgebra de Lie?
Respuesta
Constantes de estructura (structure constants). Son los valores numéricos que determinan la «forma» del grupo.
✅ Verificación de comprensión: ¿Las relaciones de conmutación del álgebra de Lie de \(SU(2)\) son iguales a las relaciones de conmutación de qué magnitud física en mecánica cuántica?
Respuesta
Son exactamente iguales a las relaciones de conmutación del momento angular (espín). \([J_i, J_j] = i\varepsilon_{ijk}J_k\).
D.5 Representaciones — «Ver» el grupo mediante matrices¶
¿Qué es una representación?¶
🟡 Lina: «Representar» los elementos abstractos del grupo como matrices concretas. El mismo grupo se puede representar con matrices de diferentes tamaños.
🔵 Kai: ¿El mismo grupo con matrices de diferente tamaño?
🟡 Lina: Hagamos una analogía. La operación abstracta de «rotación» puede rotar una imagen 2D o un objeto 3D. La misma «rotación» se representa con una matriz \(2 \times 2\) en 2D y \(3 \times 3\) en 3D. Aunque el tamaño de la matriz difiere, la «estructura» de la rotación (relaciones de conmutación, etc.) es la misma.
Matemáticamente: una representación del grupo \(G\) es una aplicación que asigna a cada elemento \(g\) de \(G\) una matriz \(D(g)\), preservando el producto del grupo:
El tamaño \(n\) de la matriz se llama la dimensión de la representación.
✅ Verificación de comprensión: En una representación de grupo, ¿qué significa preservar el producto? Escríbelo como ecuación.
Respuesta
\(D(g_1) D(g_2) = D(g_1 \cdot g_2)\). La matriz correspondiente al producto de los elementos del grupo es igual al producto de las matrices respectivas.
Representaciones de \(SU(2)\) y espín¶
\(SU(2)\) tiene exactamente una representación de dimensión \((2j+1)\) para cada número cuántico de espín \(j = 0, 1/2, 1, 3/2, 2, \ldots\).
%%{init: {"theme": "default", "themeCSS": ".edgePath .path, .flowchart-link { stroke-width: 2px !important; }"}}%%
flowchart TD
SU2["Grupo SU(2)"] --> j0["j = 0<br/>Matrices 1×1<br/>Partículas escalares"]
SU2 --> j12["j = 1/2<br/>Matrices 2×2<br/>Electrón, quarks"]
SU2 --> j1["j = 1<br/>Matrices 3×3<br/>Bosones W"]
SU2 --> j32["j = 3/2<br/>Matrices 4×4<br/>gravitino"]
SU2 --> jdots["..."]
style SU2 fill:#fef,stroke:#636
style j12 fill:#ffd,stroke:#aa0Fig. D.6: Representaciones de espín del grupo SU(2) y partículas
Tabla D.3: Representaciones de SU(2) y número cuántico de espín
| Representación | Dimensión \((2j+1)\) | Significado físico |
|---|---|---|
| \(j = 0\) (representación trivial) | 1 | Escalar (espín 0) |
| \(j = 1/2\) (representación fundamental) | 2 | Espín \(1/2\) (electrón, quarks) |
| \(j = 1\) (representación adjunta, definida abajo) | 3 | Espín \(1\) (bosones \(W\)) |
| \(j = 3/2\) | 4 | Espín \(3/2\) (gravitino) |
La dimensión de la representación adjunta de \(SU(2)\) es igual al número de generadores (= 3). De \(2j+1 = 3\) obtenemos \(j = 1\), así que la representación adjunta coincide con la representación de espín 1.
En la representación fundamental (\(j = 1/2\)), los generadores son \(T_i = \sigma_i/2\) (matrices \(2 \times 2\)).
En la representación adjunta (\(j = 1\)), los generadores son matrices \(3 \times 3\) cuyas componentes son las propias constantes de estructura:
¿Por qué esta definición es natural? La relación de conmutación \([T_a, T_b] = if_{abc}T_c\) se puede leer como «\(T_a\) actúa sobre \(T_b\) y lo rota en la dirección \(T_c\)». Es decir, los generadores mismos actúan como matrices que «rotan» a otros generadores — y las componentes de esas matrices son precisamente las constantes de estructura \(f_{abc}\).
🔵 Kai: Vaya, las constantes de estructura se convierten directamente en componentes de la matriz. Tiene algo de autorreferencial, es interesante.
🟡 Lina: La dimensión de la representación adjunta es igual al número de generadores (\(SU(2)\): 3, \(SU(3)\): 8). Esta es la base matemática de «los campos gauge pertenecen a la representación adjunta» → «el número de partículas mediadoras = número de generadores».
Para \(SU(2)\), \((T_i)_{jk} = -i\varepsilon_{ijk}\). Es decir, la componente \((j, k)\) de la matriz \(T_i\) está dada por \(-i\varepsilon_{ijk}\). Por ejemplo, la componente \((2,3)\) de \(T_1\) es, sustituyendo \(i=1, j=2, k=3\): \((T_1)_{23} = -i\varepsilon_{123} = -i\) (\(\varepsilon_{123} = +1\) es la permutación fundamental). La componente \((3,2)\) es \((T_1)_{32} = -i\varepsilon_{132} = +i\) (\(132\) intercambia los últimos dos de \(123\) (\(2\) y \(3\)), 1 intercambio = permutación impar, así que \(\varepsilon_{132} = -1\)). ¿Las componentes diagonales? Por ejemplo \((T_1)_{11} = -i\varepsilon_{111}\). \(\varepsilon_{ijk}\) es 0 cuando hay dos o más índices iguales, así que \((T_1)_{11} = 0\). Igualmente \((T_1)_{12} = -i\varepsilon_{112} = 0\), \((T_1)_{13} = -i\varepsilon_{113} = 0\). Es decir, la primera fila y primera columna de \(T_1\) son todas cero. Escribiendo todas las componentes de forma similar:
Se puede verificar por cálculo directo que estas satisfacen \([T_i, T_j] = i\varepsilon_{ijk}T_k\).
Clasificación de partículas en el Modelo Estándar¶
En el Modelo Estándar de Cap. 9, cada partícula pertenece a una representación específica del grupo gauge:
- Quarks izquierdos: representación fundamental de \(SU(3)\) (dimensión 3) y representación fundamental de \(SU(2)\) (dimensión 2)
- Electrón derecho: representación trivial de \(SU(2)\) (dimensión 1, es decir, no siente la fuerza débil)
- Gluones: representación adjunta de \(SU(3)\) (dimensión 8)
🔵 Kai: Vaya, el quark izquierdo es dimensión 3 en \(SU(3)\), dimensión 2 en \(SU(2)\)... así que para cada partícula está determinado «a qué representación pertenece».
🟡 Lina: Exacto. Y dicho al revés, la simetría clasifica las partículas. Si especificas la simetría, se restringen qué partículas pueden existir. Esta es la razón por la que la teoría de grupos es tan poderosa en física.
⚪ Mei: Es decir, las propiedades de las partículas se organizan con la etiqueta «a qué representación de qué grupo pertenece».
✅ Verificación de comprensión: En el Modelo Estándar, ¿a qué representación de \(SU(3)\) pertenecen los gluones y cuál es su dimensión?
Respuesta
Pertenecen a la representación adjunta, y su dimensión es 8. Esta es la razón por la que existen 8 tipos de gluones.
📝 Ejercicios:
- Autovalores y autovectores del espín \(1/2\) → Problema B-9. Autovalores y autovectores del espín 1/2
✅ Verificación de comprensión: ¿Qué es una «representación» de un grupo?
Respuesta
Realizar concretamente los elementos abstractos del grupo como matrices. El mismo grupo puede representarse con matrices de diferentes tamaños.
✅ Verificación de comprensión: La representación fundamental (\(2 \times 2\)) de \(SU(2)\), ¿a partículas de qué espín corresponde físicamente?
Respuesta
Corresponde a partículas de espín \(1/2\) (electrón, quarks, etc.).
D.6 Simetría y leyes de conservación — Derivación del teorema de Noether¶
Enunciado del teorema¶
🟡 Lina: A toda simetría continua le corresponde una cantidad conservada. Este es el teorema de Noether. Ya lo mencionamos en Mecánica Cuántica Mecánica Cuántica Cap. 26 y Teoría Cuántica de Campos Teoría Cuántica de Campos Cap. 3, pero aquí haremos la derivación cuidadosa para la versión de teoría de campos.
Derivación¶
Consideremos la acción de un campo \(\phi(x)\). La acción es una cantidad que representa el «costo» del movimiento del campo. Quizá hayas aprendido en la física de bachillerato que «la luz toma el camino más corto» (principio de Fermat); con la misma idea, en la naturaleza el campo elige «la configuración que minimiza (más precisamente, estaciona) la acción» — este es el principio de mínima acción. Las ecuaciones de movimiento de Newton también se pueden derivar de este principio (Teoría Cuántica de Campos Teoría Cuántica de Campos Cap. 3 referencia). La acción es la integral de la densidad lagrangiana \(\mathcal{L}\) sobre todo el espaciotiempo:
Aquí \(\mathcal{L}\) es función del campo \(\phi\) y sus derivadas \(\partial_\mu\phi\) (\(\mu = 0, 1, 2, 3\), con la derivada temporal \(\partial_0\phi = \partial\phi/\partial t\) y las derivadas espaciales \(\partial_i\phi\) como 4 componentes). \(d^4x = dt\,dx\,dy\,dz\) es el elemento de volumen del espaciotiempo 4-dimensional. La ecuación que se obtiene de la condición de minimizar la acción es la ecuación de Euler-Lagrange (ecuación del movimiento):
En el segundo término se suma sobre \(\mu = 0, 1, 2, 3\) (convención de sumar cuando el mismo índice \(\mu\) aparece repetido). Expandido: \(\partial_0\frac{\partial\mathcal{L}}{\partial(\partial_0\phi)} + \partial_1\frac{\partial\mathcal{L}}{\partial(\partial_1\phi)} + \partial_2\frac{\partial\mathcal{L}}{\partial(\partial_2\phi)} + \partial_3\frac{\partial\mathcal{L}}{\partial(\partial_3\phi)}\), suma de 4 términos. Por ejemplo, el término \(\mu = 2\) significa «derivar \(\mathcal{L}\) respecto a \(\partial_2\phi\), y luego derivar el resultado respecto a \(x^2\)».
🔵 Kai: Espera, \(\frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi)}\) es «¿derivar por una derivada?» ¿Qué se toma como variable?
🟡 Lina: Buena pregunta. Piensa que \(\mathcal{L}\) recibe \(\phi\) y \(\partial_\mu\phi\) como dos «variables independientes». Cuando derivas parcialmente \(f(x, y)\) respecto a \(x\), tratas \(y\) como constante, ¿verdad? Es lo mismo: \(\partial\mathcal{L}/\partial\phi\) es «la tasa de cambio cuando solo mueves \(\phi\) manteniendo \(\partial_\mu\phi\) fijo», y \(\partial\mathcal{L}/\partial(\partial_\mu\phi)\) es «la tasa de cambio cuando solo mueves \(\partial_\mu\phi\) manteniendo \(\phi\) fijo». La notación parece extraña pero lo que se hace es una derivada parcial ordinaria.
Intuitivamente, el primer término \(\frac{\partial\mathcal{L}}{\partial\phi}\) representa «cómo afecta al lagrangiano el valor del campo \(\phi\) en sí», y el segundo «cómo afecta la tasa de cambio del campo (derivada)», y el balance entre ambos determina la ecuación del movimiento. En la \(F = ma\) de Newton, corresponde al balance entre la fuerza (derivada del potencial) y la aceleración (segunda derivada de la posición).
🔵 Kai: O sea, es como una «versión para campos» de la ecuación de movimiento de Newton. Pero no termino de entender intuitivamente por qué tiene esta forma.
🟡 Lina: Gracias por ser honesto. En pocas palabras, «minimizar la acción \(S\)» significa que «al variarla un poco, el cambio es cero». Lo mismo que \(f'(x) = 0\) en el mínimo de \(f(x)\). De hecho, para una partícula unidimensional, con \(L = \frac{1}{2}m\dot{x}^2 - V(x)\), la ecuación de Euler-Lagrange \(\frac{\partial L}{\partial x} - \frac{d}{dt}\frac{\partial L}{\partial \dot{x}} = 0\) da \(\frac{\partial L}{\partial x} = -V'(x)\) y \(\frac{\partial L}{\partial \dot{x}} = m\dot{x}\), así que \(-V'(x) - m\ddot{x} = 0\), es decir \(m\ddot{x} = -V'(x)\) — ¡sale directamente \(F = ma\) de Newton! La versión para campos es su extensión: piensa que en lugar de la posición \(x(t)\) está el campo \(\phi(x)\), y en lugar de la velocidad \(\dot{x}\) está la derivada del campo \(\partial_\mu\phi\). La tabla de correspondencia:
| Mecánica de partículas | Teoría de campos |
|---|---|
| Posición \(x(t)\) | Campo \(\phi(x)\) |
| Velocidad \(\dot{x}\) | Derivada del campo \(\partial_\mu\phi\) |
| Tiempo \(t\) | Coordenadas del espaciotiempo \(x^\mu\) |
| \(\frac{\partial L}{\partial x} - \frac{d}{dt}\frac{\partial L}{\partial\dot{x}} = 0\) | \(\frac{\partial\mathcal{L}}{\partial\phi} - \partial_\mu\frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi)} = 0\) |
⚪ Mei: La correspondencia entre mecánica de partículas y teoría de campos se alinea perfectamente. La estructura es la misma, solo aumentan las variables.
🟡 Lina: La derivación en detalle está en Teoría Cuántica de Campos Teoría Cuántica de Campos Cap. 3, así que aquí aceptemos «la ecuación del movimiento que sale de minimizar la acción» y avancemos.
Ahora vamos a derivar el teorema de Noether, y lo único que usaremos es: la ecuación de Euler-Lagrange actual, la regla del producto que se aprende en bachillerato \((fg)' = f'g + fg'\), y la diferencial total de funciones de varias variables (\(\Delta f \approx \frac{\partial f}{\partial x}\Delta x + \frac{\partial f}{\partial y}\Delta y\)), estas 3 cosas. La diferencial total la explico justo a continuación, así que no te preocupes. Si aceptas la ecuación de Euler-Lagrange como «para campos que satisfacen la ecuación del movimiento, cierta cantidad es cero», podrás seguir el resto del argumento.
Bajo una transformación continua \(\phi(x) \to \phi(x) + \delta\phi(x)\), la variación de la densidad lagrangiana es:
Esto tiene la misma estructura que la diferencial total de una función de varias variables. En el caso de 1 variable, al cambiar \(x\) a \(x + \Delta x\), \(\Delta f \approx f'(x)\Delta x\) es algo que se aprende en bachillerato. Para 2 variables es su extensión: la variación infinitesimal de \(f(x, y)\) es \(\Delta f \approx \frac{\partial f}{\partial x}\Delta x + \frac{\partial f}{\partial y}\Delta y\) — solo se suman las contribuciones del cambio de cada variable. De la misma manera, esto representa la variación de \(\mathcal{L}(\phi, \partial_\mu\phi)\) cuando las dos «variables» \(\phi\) y \(\partial_\mu\phi\) varían en \(\delta\phi\) y \(\delta(\partial_\mu\phi)\) respectivamente (en el segundo término se suma sobre \(\mu\)).
🔵 Kai: Ya veo, solo es sumar las variaciones de cada variable. La diferencial total suena grandilocuente pero lo que hace es simple.
🟡 Lina: \(\delta\) y \(\partial_\mu\) se pueden intercambiar de orden. \(\delta\) es la operación de «variar un poco la forma del campo» y \(\partial_\mu\) es «ver la pendiente en un punto», y no interfieren entre sí. Verifiquémoslo concretamente: supón que \(\phi\) cambia a \(\phi + \epsilon\, \eta(x)\) (\(\eta(x)\) es la «forma» de la variación). Entonces \(\delta\phi = \epsilon\,\eta\), y \(\partial_\mu(\delta\phi) = \epsilon\,\partial_\mu\eta\). Por otro lado, \(\delta(\partial_\mu\phi) = \partial_\mu(\phi + \epsilon\,\eta) - \partial_\mu\phi = \epsilon\,\partial_\mu\eta\). Efectivamente coinciden. Es decir \(\delta(\partial_\mu\phi) = \partial_\mu(\delta\phi)\). Sustituyendo:
El objetivo a partir de aquí es separar \(\delta\mathcal{L}\) en una «parte de la ecuación del movimiento» y una «parte de divergencia total». Para ello, reescribamos el segundo término usando la regla del producto:
Usando esto:
Sustituyendo:
⚪ Mei: El primer término tiene exactamente la forma de la ecuación de Euler-Lagrange.
🟡 Lina: Exacto. Los \([\cdots]\) del primer término son la ecuación de Euler-Lagrange (ecuación del movimiento). Para campos que la satisfacen (on-shell), esto es cero:
Por tanto, cuando se satisface la ecuación del movimiento:
Ahora, que la transformación sea una simetría significa que la acción \(S\) es invariante. El caso más simple es \(\delta\mathcal{L} = 0\) (la propia densidad lagrangiana es invariante), y en este caso:
Donde la corriente de Noether \(j^\mu\) es:
Si el campo tiene varias componentes (por ejemplo un campo complejo \(\phi\) y \(\phi^*\)), se suman las contribuciones de cada componente: \(j^\mu = \sum_i \frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi_i)}\,\delta\phi_i\). En el ejemplo concreto 2 usaremos esto de hecho.
Más generalmente, aunque \(\delta\mathcal{L}\) no sea cero, si tiene la forma de una divergencia total \(\delta\mathcal{L} = \partial_\mu K^\mu\), la acción sigue siendo invariante (bajo condiciones de frontera que eliminen el término de borde), y la corriente conservada se modifica a \(j^\mu - K^\mu\). El ejemplo de la traslación espacial (abajo) corresponde a este caso general, pero la estructura esencial es la misma.
\(\partial_\mu j^\mu = 0\) es una ley de conservación (ecuación de continuidad). La carga conservada correspondiente es:
¿Por qué \(Q\) se conserva? Integrando \(\partial_\mu j^\mu = \partial_0 j^0 + \partial_i j^i = 0\) sobre todo el espacio, \(\frac{dQ}{dt} = -\int d^3x\, \partial_i j^i\). El lado derecho, por el teorema de Gauss, se convierte en una integral de superficie en la frontera (infinito), que se anula bajo la condición de que el campo sea cero en el infinito. Por tanto \(\frac{dQ}{dt} = 0\) (\(Q\) no cambia en el tiempo).
🔵 Kai: Espera. Usaste la regla del producto en el medio para separar los términos, ¿fue para crear la forma de la ecuación de Euler-Lagrange?
🟡 Lina: Exacto. Para campos que satisfacen la ecuación del movimiento, el primer término se anula y lo que queda tiene forma de divergencia total. Eso es la ley de conservación.
🔵 Kai: Increíble. Solo asumiendo la simetría (\(\delta\mathcal{L} = 0\)) la cantidad conservada sale automáticamente.
🟡 Lina: Así es. Ese es el poder del teorema de Noether. Veamos ejemplos concretos.
Ejemplo concreto 1: Traslación espacial → Conservación del momento¶
::: {.callout-tip}
Sugerencia de lectura¶
Este ejemplo tiene manipulaciones de índices algo pesadas. Si te atascas en el camino, lee primero el «Ejemplo concreto 2: Transformación de fase \(U(1)\) → Conservación de la carga» y luego vuelve aquí; la estructura del teorema de Noether se verá mucho más clara. :::
Este ejemplo es un poco más complejo que la derivación anterior, y corresponde al caso en que \(\delta\mathcal{L} \neq 0\) sino que resulta ser una divergencia total. Que sea «divergencia total» significa que \(\delta\mathcal{L}\) no es cero pero puede escribirse como \(\delta\mathcal{L} = \partial_\mu(\text{algo})\) — en este caso la integral de la acción sigue siendo invariante bajo condiciones de frontera.
Transformación: \(\phi(x) \to \phi(x + \epsilon) \approx \phi(x) + \epsilon^\nu \partial_\nu\phi\)
Es decir \(\delta\phi = \epsilon^\nu \partial_\nu\phi\). Para cada dirección \(\nu\) se obtiene una corriente de Noether. La corriente correspondiente a la traslación en la dirección \(\nu\) es:
Para la traslación espacial \(\delta\phi = \epsilon^\nu\partial_\nu\phi\), sustituyendo en la fórmula de la corriente de Noether \(j^\mu = \frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi)}\delta\phi\) se obtiene \(\frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi)}\epsilon^\nu\partial_\nu\phi\).
Sin embargo, bajo traslación espacial la propia densidad lagrangiana también varía como una divergencia total distinta de cero. ¿Por qué? \(\mathcal{L}\) es función de \(\phi\) y \(\partial_\mu\phi\), pero como \(\phi(x)\) depende de \(x\), al final \(\mathcal{L}\) también es función de \(x\). Al desplazar el espacio en \(\epsilon\), el valor de \(\mathcal{L}\) cambia en la cantidad desplazada. Concretamente, \(\mathcal{L}(x) \to \mathcal{L}(x + \epsilon) \approx \mathcal{L}(x) + \epsilon^\nu\partial_\nu\mathcal{L}(x)\). Es decir \(\delta\mathcal{L} = \epsilon^\nu\partial_\nu\mathcal{L}\). Como \(\epsilon^\nu\) es una constante (cantidad infinitesimal independiente de la posición), puede sacarse fuera de \(\partial_\mu\). Queremos poner \(\partial_\nu\mathcal{L}\) en la forma \(\partial_\mu(\cdots)\). ¿Por qué? Porque al final queremos «meter la corriente conservada \(j^\mu\) y la parte de \(\delta\mathcal{L}\) dentro del mismo \(\partial_\mu\) y restarlas» para llegar a la forma de ley de conservación \(\partial_\mu(\cdots) = 0\). Para ello, ambos necesitan estar escritos como \(\partial_\mu(\cdots)\) con el mismo índice \(\mu\). El contenido físico no cambia — es solo una preparación para alinear los índices.
Para ello usamos la delta de Kronecker \(\delta^\mu_\nu\). Esta es un símbolo que vale 1 cuando \(\mu = \nu\) y 0 cuando \(\mu \neq \nu\). Por ejemplo \(\delta^0_0 = 1\), \(\delta^1_0 = 0\), \(\delta^2_2 = 1\), etc. Su propiedad más importante es «seleccionar un índice»: \(\sum_\mu \delta^\mu_\nu A_\mu = A_\nu\) (solo sobrevive el término \(\mu = \nu\), los demás se anulan con 0). Concretamente para \(\nu = 2\): \(\sum_\mu \delta^\mu_2 A_\mu = \delta^0_2 A_0 + \delta^1_2 A_1 + \delta^2_2 A_2 + \delta^3_2 A_3 = 0 + 0 + A_2 + 0 = A_2\).
Usando esto podemos reescribir \(\partial_\nu\mathcal{L} = \delta^\mu_\nu\partial_\mu\mathcal{L}\). Por tanto \(\delta\mathcal{L} = \epsilon^\nu \delta^\mu_\nu\partial_\mu\mathcal{L} = \partial_\mu(\epsilon^\nu \delta^\mu_\nu \mathcal{L})\) (la última igualdad se debe a que \(\epsilon^\nu \delta^\mu_\nu\) es constante, así que puede meterse dentro de \(\partial_\mu\)). Esto corresponde al caso general mencionado antes: «si \(\delta\mathcal{L}\) tiene la forma de divergencia total \(\partial_\mu K^\mu\), la corriente conservada se modifica a \(j^\mu - K^\mu\)». \(\delta\mathcal{L} = \epsilon^\nu\partial_\nu\mathcal{L} = \partial_\mu(\epsilon^\nu\delta^\mu_\nu\mathcal{L})\) así que \(K^\mu = \epsilon^\nu\delta^\mu_\nu\mathcal{L}\) (donde \(\delta^\mu_\nu\) es la delta de Kronecker: vale 1 si \(\mu = \nu\), 0 en caso contrario. Cumple el papel de seleccionar un índice: \(\sum_\mu \delta^\mu_\nu A_\mu = A_\nu\)). La corriente conservada modificada es \(j^\mu - K^\mu\):
En la última igualdad sacamos \(\epsilon^\nu\) como factor común. Definimos lo que queda dentro del corchete como \(T^\mu{}_\nu\):
La ley de conservación de la corriente \(\partial_\mu(j^\mu - K^\mu) = 0\) se escribe \(\partial_\mu(\epsilon^\nu T^\mu{}_\nu) = \epsilon^\nu \partial_\mu T^\mu{}_\nu = 0\) (\(\epsilon^\nu\) es constante así que sale fuera de \(\partial_\mu\)). Como \(\epsilon^\nu\) es un vector constante infinitesimal arbitrario, para que \(\epsilon^\nu \partial_\mu T^\mu{}_\nu = 0\) se cumpla para todo \(\epsilon^\nu\), debe ser \(\partial_\mu T^\mu{}_\nu = 0\) para cada \(\nu\) (argumento: si \(\epsilon^\nu X_\nu = 0\) para todo \(\epsilon^\nu\) entonces \(X_\nu = 0\)). Es decir, el tensor canónico de energía-momento \(T^\mu{}_\nu\) satisface la ley de conservación:
Aquí \(T^\mu{}_\nu\) es una cantidad con un índice superior \(\mu\) y uno inferior \(\nu\); \(\mu\) especifica la «dirección del flujo» y \(\nu\) la «dirección de la traslación» (\(\nu = 0\) es la dirección temporal, \(\nu = 1, 2, 3\) las direcciones espaciales). Esta cantidad describe el «flujo» de energía y momento del campo (detalles en Teoría Cuántica de Campos Teoría Cuántica de Campos Cap. 3). La carga conservada es:
Para \(\nu = 1, 2, 3\), \(P_\nu\) corresponde al momento en cada dirección. Para \(\nu = 0\) se obtiene una cantidad conservada correspondiente a la energía (el signo exacto depende de la convención de signos de la métrica, pero lo esencial aquí es la correspondencia «traslación temporal → conservación de la energía, traslación espacial → conservación del momento»). Es decir, de la simetría de traslación espacial se deriva la conservación del momento, y de la simetría de traslación temporal se deriva la conservación de la energía.
🔵 Kai: Sinceramente, con tantos índices no pude seguir todos los cálculos intermedios. Pero la conclusión es que «si la física no cambia al desplazar el espacio → el momento se conserva», ¿no?
🟡 Lina: Exacto, la conclusión es esa. Las manipulaciones de índices intermedias piénsalas como práctica de Apéndice C. Lo importante es que la estructura «simetría → ley de conservación» se ve mucho más clara en el siguiente ejemplo de \(U(1)\), así que puedes entender ese primero y volver después.
Ejemplo concreto 2: Transformación de fase \(U(1)\) → Conservación de la carga¶
Transformación sobre el campo escalar complejo \(\phi\): \(\phi \to e^{i\alpha}\phi \approx \phi + i\alpha\phi\) (\(\alpha \ll 1\))
Es decir \(\delta\phi = i\alpha\phi\). La corriente de Noether es:
El campo complejo \(\phi\) es la combinación de dos campos reales: la parte real \(\phi_1\) y la imaginaria \(\phi_2\) (\(\phi = \phi_1 + i\phi_2\)).
🔵 Kai: Espera, \(\phi^*\) se determina automáticamente una vez que conoces \(\phi\), ¿no? ¿Cómo puedes tratarlo como una «variable independiente»?
🟡 Lina: Buena duda. De hecho, tratar \(\phi\) y \(\phi^*\) como independientes es matemáticamente equivalente a tratar \(\phi_1 = (\phi + \phi^*)/2\) y \(\phi_2 = (\phi - \phi^*)/(2i)\) como independientes. Es solo un cambio de variables de \((\phi_1, \phi_2)\) a \((\phi, \phi^*)\). Es un truco que facilita el cálculo de derivadas parciales.
🔵 Kai: Ah, es lo mismo que tratar la parte real e imaginaria por separado, solo que lo haces con \(\phi\) y \(\phi^*\).
🟡 Lina: Exacto. Continuemos entonces. \(\delta\phi = i\alpha\phi\), \(\delta\phi^* = -i\alpha\phi^*\), así que la corriente de Noether suma las contribuciones de ambos. Sustituyendo en la fórmula general \(j^\mu = \frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi_i)}\,\delta\phi_i\) obtenemos \(\alpha\left[\frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi)}\,(i\phi) + \frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi^*)}\,(-i\phi^*)\right]\). Como la ley de conservación \(\partial_\mu j^\mu = 0\) sigue cumpliéndose si dividimos por la constante \(\alpha\) que multiplica todo, definimos como corriente de Noether la parte sin \(\alpha\): $\(j^\mu = \frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi)}\,(i\phi) + \frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi^*)}\,(-i\phi^*)\)$
Por ejemplo, consideremos el campo escalar complejo libre \(\mathcal{L} = (\partial_\mu\phi)^*(\partial^\mu\phi) - m^2\phi^*\phi\). Adelantando la conclusión, \(\frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi)} = \partial^\mu\phi^*\) (análogamente \(\frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi^*)} = \partial^\mu\phi\)). Intuitivamente es la operación de «leer el compañero que multiplica a \(\partial_\mu\phi\) dentro de \(\mathcal{L}\)»; lo mismo que cuando derivas \(f(x,y) = xy\) respecto a \(x\) y queda \(y\).
::: {.callout-tip}
Para el lector en primera lectura¶
Los detalles de la manipulación de índices a continuación pueden saltarse en primera lectura; puedes avanzar directamente al párrafo «Sustituyendo estos en la fórmula de la corriente de Noether». Basta recordar la conclusión: \(\frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi)} = \partial^\mu\phi^*\), \(\frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi^*)} = \partial^\mu\phi\). Sustituyendo en la fórmula de la corriente de Noether, el resultado final es \(j^\mu = i(\phi\,\partial^\mu\phi^* - \phi^*\,\partial^\mu\phi)\). :::
Tratando \(\phi\) y \(\phi^*\) como variables independientes, la parte de \(\mathcal{L}\) que contiene \(\partial_\mu\phi\) es \((\partial_\mu\phi)^*(\partial^\mu\phi)\). Aquí \(\partial^\mu\phi \equiv \eta^{\mu\nu}\partial_\nu\phi\) es la «derivada con índice subido» aprendida en Apéndice C, que convierte el subíndice en superíndice usando la métrica de Minkowski \(\eta^{\mu\nu}\).
Adelantando la conclusión:
Esta es la operación de «leer el coeficiente que acompaña a \(\partial_\mu\phi\) en \(\mathcal{L}\)». Verifiquémoslo.
Practiquemos primero con un caso sencillo. Si \(\mathcal{L}\) fuera simplemente \(\mathcal{L} = (\partial_0\phi^*)(\partial_0\phi)\), es obvio que \(\frac{\partial\mathcal{L}}{\partial(\partial_0\phi)} = \partial_0\phi^*\) (igual que derivar \(f(x) = ax\) respecto a \(x\) da \(a\)). En el caso general, escribiendo \((\partial_\mu\phi)^*(\partial^\mu\phi)\) con índices explícitos: \(\sum_{\nu}(\partial_\nu\phi^*)(\eta^{\nu\rho}\partial_\rho\phi)\) (sumando sobre \(\nu\) y \(\rho\)). Queremos hallar \(\frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi)}\). Atención: aquí \(\mu\) no es un índice de suma, sino un índice fijado a un valor particular (por ejemplo si \(\mu = 2\) significa «derivar respecto a \(\partial_2\phi\)»). Se consideran \(\partial_0\phi\), \(\partial_1\phi\), \(\partial_2\phi\), \(\partial_3\phi\) como 4 variables independientes, y se deriva respecto a una de ellas, \(\partial_\mu\phi\).
Con la misma idea que en el caso sencillo:
::: {.callout-tip}
Nota sobre la lectura de los índices¶
Aquí \(\mu\) es un valor específico fijado (por ejemplo \(\mu = 2\)), no un índice de suma. «Derivar respecto a \(\partial_\mu\phi\)» significa «de las 4 variables independientes \(\partial_0\phi, \partial_1\phi, \partial_2\phi, \partial_3\phi\), derivar respecto a la \(\mu\)-ésima». :::
En \(\sum_{\rho}\eta^{\nu\rho}\partial_\rho\phi\), lo que contiene \(\partial_\mu\phi\) es solo el término \(\rho = \mu\) (es decir \(\eta^{\nu\mu}\partial_\mu\phi\)). Los otros términos con \(\rho \neq \mu\) no contienen \(\partial_\mu\phi\) así que se tratan como «constantes», y derivar respecto a \(\partial_\mu\phi\) da cero. Por tanto solo queda el coeficiente \(\eta^{\nu\mu}\) del término \(\rho = \mu\). Sumando sobre \(\nu\) se obtiene \(\sum_{\nu}(\partial_\nu\phi^*)\eta^{\nu\mu}\). Como la métrica de Minkowski es simétrica (\(\eta^{\nu\mu} = \eta^{\mu\nu}\)), \(\sum_{\nu}(\partial_\nu\phi^*)\eta^{\nu\mu} = \sum_{\nu}\eta^{\mu\nu}\partial_\nu\phi^* \equiv \partial^\mu\phi^*\). Análogamente \(\frac{\partial\mathcal{L}}{\partial(\partial_\mu\phi^*)} = \partial^\mu\phi\). Sustituyendo en la fórmula de la corriente de Noether:
::: {.callout-note}
Sobre la convención de signos¶
Según la literatura, algunos adoptan \(j^\mu = i(\phi^*\,\partial^\mu\phi - \phi\,\partial^\mu\phi^*)\) (signo global opuesto). Esto se debe a la convención sobre el signo de \(\alpha\) en la definición de \(\delta\phi\), y corresponde a la definición del signo positivo/negativo de la carga \(Q\). La conclusión física (que la carga se conserva) es la misma con cualquier convención. Aquí adoptamos la forma que resulta fielmente de la sustitución directa en la fórmula de la corriente de Noether. :::
La carga conservada \(Q = \int d^3x\, j^0\) es la carga eléctrica. La conservación de la carga es una consecuencia de la simetría \(U(1)\).
✅ Verificación de comprensión: ¿Cuál es la cantidad conservada de Noether correspondiente a la simetría de fase \(U(1)\) \(\phi \to e^{i\alpha}\phi\)?
Respuesta
La carga eléctrica. Del teorema de Noether aplicado a la simetría \(U(1)\) se deriva la conservación de la carga.
Tabla resumen¶
Tabla D.4: Teorema de Noether: Correspondencia entre simetrías y cantidades conservadas
| Simetría | Transformación | Cantidad conservada |
|---|---|---|
| Traslación temporal | \(t \to t + \epsilon\) | Energía |
| Traslación espacial | \(\mathbf{x} \to \mathbf{x} + \boldsymbol{\epsilon}\) | Momento |
| Rotación | \(\mathbf{x} \to R\mathbf{x}\) | Momento angular |
| Gauge \(U(1)\) | \(\psi \to e^{i\theta}\psi\) | Carga eléctrica |
| Gauge \(SU(3)\) | Transformación de color de quarks | Carga de color |
%%{init: {"theme": "default", "themeCSS": ".edgePath .path, .flowchart-link { stroke-width: 2px !important; }"}}%%
flowchart LR
subgraph Simetrías
T["Traslación temporal"]
X["Traslación espacial"]
R["Rotación"]
U["Gauge U(1)"]
end
subgraph Cantidades conservadas
E["Energía"]
P["Momento"]
L["Momento angular"]
Q["Carga"]
end
T -->|Noether| E
X -->|Noether| P
R -->|Noether| L
U -->|Noether| QFig. D.7: Teorema de Noether: Simetrías y cantidades conservadas
Cuantas más simetrías, más cantidades conservadas. Cuantas más cantidades conservadas, más restringido está el comportamiento del sistema. Esta es la razón por la que la simetría es tan abrumadoramente importante en la física.
✅ Verificación de comprensión: ¿Qué enuncia el teorema de Noether?
Respuesta
A toda simetría continua le corresponde una cantidad conservada (ejemplo: simetría de traslación temporal → conservación de la energía).
✅ Verificación de comprensión: ¿Cuál es la cantidad conservada correspondiente a la simetría de traslación espacial?
Respuesta
El momento.
D.7 Simetría gauge y derivada covariante¶
De la simetría global a la simetría local¶
🟡 Lina: La simetría \(U(1)\) \(\phi \to e^{i\alpha}\phi\) que vimos en la sección D.6 es para el caso en que \(\alpha\) es una constante (el mismo valor en todo el espaciotiempo). A esto se le llama simetría global.
Aquí, hagamos una exigencia más fuerte: que \(\alpha\) pueda elegirse independientemente en cada punto del espaciotiempo, es decir, exigir que la física no cambie incluso con \(\alpha \to \alpha(x)\). Esta es la simetría local, es decir, la simetría gauge.
🔵 Kai: ¿Por qué hacer una exigencia tan fuerte a propósito?
🟡 Lina: Históricamente es una extensión del espíritu de la relatividad general: «las leyes físicas no deben depender de la elección de coordenadas». Y sorprendentemente, al exigir simetría local aparece automáticamente un campo que media la fuerza (campo gauge). La fuerza nace de la simetría.
Descubrimiento del problema: La derivada ordinaria no es gauge-invariante¶
Consideremos el lagrangiano del campo escalar complejo libre (el mismo que en el ejemplo concreto 2 de D.6. \(\partial^\mu = \eta^{\mu\nu}\partial_\nu\) es la subida/bajada de índices aprendida en Apéndice C):
El primer término \((\partial_\mu\phi)^*(\partial^\mu\phi)\) es el término de «energía cinética» del campo, que mide cuánto varía el campo dentro del espaciotiempo. El segundo término \(m^2\phi^*\phi\) es el «término de masa» que describe una partícula de masa \(m\).
Aquí \((\partial_\mu\phi)^*(\partial^\mu\phi)\) se suma sobre \(\mu = 0, 1, 2, 3\) (convención de suma de Einstein). Subiendo el índice con \(\partial^\mu\phi = \eta^{\mu\nu}\partial_\nu\phi\) (ver Apéndice C), y usando la métrica de Minkowski \(\eta^{\mu\nu} = \text{diag}(-1,+1,+1,+1)\), expandido da \(-|\partial_0\phi|^2 + |\partial_1\phi|^2 + |\partial_2\phi|^2 + |\partial_3\phi|^2\). Que la derivada temporal tenga un signo menos es consecuencia de la convención de signos de la métrica de Minkowski, y es una estructura estándar en la teoría de campos relativista.
::: {.callout-note}
Sobre la convención de signos¶
En este capítulo usamos la misma convención de signos que la parte Relatividad General: \(\eta_{\mu\nu} = \text{diag}(-1,+1,+1,+1)\). En la parte Teoría Cuántica de Campos se usa la convención opuesta \((+,-,-,-)\), así que hay que tener cuidado. Las conclusiones físicas no dependen de la convención. :::
Bajo la transformación global \(\phi \to e^{i\alpha}\phi\) (\(\alpha\) = constante):
Por tanto \(\mathcal{L}\) es invariante. Sin problema.
Sin embargo, bajo la transformación local \(\phi(x) \to e^{i\alpha(x)}\phi(x)\) (\(\alpha(x)\) depende del lugar):
¡Aparece un término extra \(i(\partial_\mu\alpha)\phi\)! \(\partial_\mu\phi\) no puede sacar limpiamente solo \(e^{i\alpha(x)}\) delante. Es decir, la derivada ordinaria \(\partial_\mu\) no se transforma «limpiamente» bajo la transformación gauge local.
⚪ Mei: Si \(\alpha\) es constante entonces \(\partial_\mu\alpha = 0\) y no hay problema, pero cuando depende del lugar, la derivada genera un término extra.
Solución: Introducción de la derivada covariante¶
🟡 Lina: Para resolver este problema, introducimos un nuevo campo \(A_\mu(x)\) (campo gauge) y definimos la derivada covariante:
Donde \(g\) es la constante de acoplamiento (parámetro que determina la intensidad de la fuerza).
Exijamos que \(D_\mu\phi\) se transforme igual que \(\phi\) (es decir \(D_\mu\phi \to e^{i\alpha(x)}D_\mu\phi\)). Esto determinará la regla de transformación de \(A_\mu\).
Calculemos la transformación de \(D_\mu\phi\). Escribiendo la derivada covariante después de la transformación gauge como \(D'_\mu = \partial_\mu - igA'_\mu\) (\(A_\mu\) cambiado a \(A'_\mu\)):
Para que esto sea igual a \(e^{i\alpha}D_\mu\phi = e^{i\alpha}(\partial_\mu - igA_\mu)\phi\):
\(\partial_\mu\phi\) se cancela en ambos lados. Dividiendo por \(\phi\):
Reorganizando:
¡Esta es la regla de transformación del campo gauge! Es la misma forma que la «transformación gauge \(A_\mu \to A_\mu + \partial_\mu\Lambda\)» aprendida en electromagnetismo.
🔵 Kai: Vaya, ¡se cancela limpiamente! El término extra se compensa con la transformación de \(A_\mu\).
✅ Verificación de comprensión: ¿Cuál es el propósito de introducir la derivada covariante \(D_\mu = \partial_\mu - igA_\mu\)?
Respuesta
Para que \(D_\mu\phi\) se transforme igual que \(\phi\) bajo la transformación gauge local (\(D_\mu\phi \to e^{i\alpha(x)}D_\mu\phi\)). Resuelve el problema de que con la derivada ordinaria \(\partial_\mu\) aparece un término extra \(\partial_\mu\alpha\).
🔵 Kai: ¿Eh, solo con exigir simetría local ha aparecido el campo electromagnético? Pero espera, ¿cómo sabes que \(A_\mu\) es el potencial electromagnético? ¿No es simplemente que «introdujimos un campo nuevo»?
🟡 Lina: Buena duda. La primera pista es que la regla de transformación \(A_\mu \to A_\mu + \frac{1}{g}\partial_\mu\alpha\) es la misma forma que la transformación gauge aprendida en electromagnetismo (Cap. 2 referencia). Además, al derivar la ecuación del movimiento de \(A_\mu\) del lagrangiano gauge-invariante que escribiremos al final de la sección D.7, salen las ecuaciones de Maxwell (derivación en Teoría Cuántica de Campos Teoría Cuántica de Campos Cap. 3). Con estos dos hechos se concluye que \(A_\mu\) no es otro que el potencial electromagnético (el campo del fotón). Exigir simetría \(U(1)\) local → el campo gauge (fotón) aparece necesariamente → se deriva la fuerza electromagnética. Este es el núcleo del principio gauge.
🔵 Kai: Entonces, ¿si haces lo mismo con \(SU(2)\) o \(SU(3)\), salen la fuerza débil y la fuerza fuerte?
🟡 Lina: Exactamente. Si exiges simetría local \(SU(2)\) aparecen los bosones \(W\) y \(Z\), y con \(SU(3)\) los 8 gluones, todo automáticamente. Es exactamente la misma estructura lógica.
⚪ Mei: Resumiendo: «la derivada ordinaria se rompe bajo la transformación local → se introduce un campo gauge para compensar → ese campo gauge resultó ser la partícula mediadora de la fuerza». Son 3 pasos. Una vez que decides el punto de partida (exigir simetría local), el resto se determina necesariamente.
🟡 Lina: Exacto. Con solo exigir la simetría se deriva la existencia de la fuerza — ese es el poder del principio gauge.
🔵 Kai: Pero al revés, «por qué exigir la simetría local» en sí no está explicado, ¿verdad? ¿Eso solo se puede verificar experimentalmente?
🟡 Lina: Observación aguda. Efectivamente, «por qué la naturaleza eligió la simetría local» es casi un axioma a día de hoy. Sin embargo, si asumes simetría local los resultados coinciden maravillosamente con los experimentos — esa es la mayor evidencia.
🔵 Kai: O sea, «asumir simetría local → se determina la forma de la fuerza → coincide con los experimentos», así que creemos que la hipótesis es correcta. El «por qué» del punto de partida está sin resolver, pero si los resultados encajan es un principio poderoso.
%%{init: {"theme": "default", "themeCSS": ".edgePath .path, .flowchart-link { stroke-width: 2px !important; }"}}%%
flowchart TD
A["Simetría U(1) global<br/>φ → e^{iα}φ (α = constante)"] --> B["Se exige localización<br/>α → α(x)"]
B --> C["∂μφ no se transforma limpiamente<br/>Aparece término extra ∂μα"]
C --> D["Se introduce derivada covariante Dμ = ∂μ − igAμ"]
D --> E["Campo gauge Aμ (fotón) aparece necesariamente"]
E --> F["Se deriva la fuerza electromagnética"]
style A fill:#eef,stroke:#339
style F fill:#fdd,stroke:#c33Fig. D.8: Derivación del campo gauge a partir de la simetría gauge local
Lagrangiano gauge-invariante¶
Con la derivada covariante se puede escribir un lagrangiano localmente gauge-invariante:
El último término es la energía cinética del propio campo gauge. \(F_{\mu\nu}\) es el tensor de intensidad del campo:
Este es el tensor que describe de forma unificada el campo eléctrico y magnético del electromagnetismo (Relatividad General Relatividad General Cap. 4 referencia). Se puede verificar por cálculo directo que \(F_{\mu\nu}\) es invariante bajo la transformación gauge \(A_\mu \to A_\mu + \frac{1}{g}\partial_\mu\alpha\) (debido a que \(\partial_\mu\partial_\nu\alpha - \partial_\nu\partial_\mu\alpha = 0\)). Por tanto \(F_{\mu\nu}F^{\mu\nu}\) también es gauge-invariante.
Extensión a teoría gauge no abeliana¶
🟡 Lina: \(U(1)\) era un grupo conmutativo, pero al extender a grupos no conmutativos como \(SU(2)\) o \(SU(3)\), la derivada covariante es:
Donde \(T_a\) son los generadores del grupo y \(A_\mu^a\) es el campo gauge correspondiente a cada generador. Para \(SU(3)\), \(a = 1, \ldots, 8\) y aparecen 8 campos gauge (= 8 tipos de gluones).
En el caso no conmutativo, el tensor de intensidad del campo también tiene un término adicional:
El último término \(gf_{abc}A_\mu^b A_\nu^c\) es específico de los grupos no conmutativos. Esto hace que los campos gauge interactúen entre sí (los gluones chocan entre sí). Para \(U(1)\) (fuerza electromagnética), \(f_{abc} = 0\) y los fotones no interactúan directamente entre sí.
🔵 Kai: Los fotones no chocan entre sí, pero los gluones sí. Eso es culpa de la no conmutatividad (\(f_{abc} \neq 0\)), ¿no? Pero que las partículas mediadoras choquen entre sí suena como que la fuerza se comporta totalmente diferente al electromagnetismo.
🟡 Lina: Exactamente así es. Debido a la interacción entre gluones, la fuerza entre quarks se hace más fuerte a mayor distancia — este es el origen del «confinamiento» (el fenómeno de que los quarks no pueden extraerse individualmente). Contrasta con la fuerza electromagnética que se debilita con el cuadrado de la distancia. Los detalles de esta estructura están en Teoría Cuántica de Campos Teoría Cuántica de Campos Cap. 17 (teoría de Yang-Mills).
✅ Verificación de comprensión: ¿Por qué al exigir invariancia gauge local aparece necesariamente un campo gauge (campo que media la fuerza)?
Respuesta
La derivada ordinaria \(\partial_\mu\) no se transforma «limpiamente» bajo la transformación gauge local (aparece un término extra \(\partial_\mu\alpha\)). Para compensar esto hay que introducir el campo gauge \(A_\mu\) y construir la derivada covariante \(D_\mu = \partial_\mu - igA_\mu\).
✅ Verificación de comprensión: En la teoría gauge de \(SU(3)\), ¿cuántos campos gauge se necesitan? ¿A qué corresponden?
Respuesta
- \(SU(3)\) tiene 8 generadores, y a cada generador le corresponde 1 campo gauge. Físicamente son los 8 tipos de gluones.
D.8 Ruptura espontánea de simetría¶
¿La simetría existe pero no se ve?¶
🟡 Lina: En el mecanismo de Higgs de Cap. 9, la ruptura espontánea de simetría (spontaneous symmetry breaking, SSB) juega un papel importante. Aquí veremos su estructura matemática.
🔵 Kai: ¿Qué significa «romperse espontáneamente»?
🟡 Lina: Empecemos con un ejemplo intuitivo. Coloca un lápiz de pie verticalmente sobre una mesa. El lápiz tiene simetría rotacional (puede caer en cualquier dirección). Pero cuando realmente cae, elige una dirección particular. La ley es simétrica, pero el estado rompe la simetría.
Potencial tipo sombrero mexicano¶
Formulemos esto en teoría de campos. Consideremos el potencial de un campo escalar complejo \(\phi\):
Donde \(\lambda > 0\) (condición para que el potencial no diverja hacia abajo).
Caso 1: \(\mu^2 > 0\) (caso habitual)
El mínimo del potencial está en \(\phi = 0\). Derivando \(V\) respecto a \(|\phi|\) e igualando a cero:
Si \(\mu^2 > 0\), \(\lambda > 0\), lo que está dentro del paréntesis es siempre positivo, así que la única solución es \(|\phi| = 0\). El vacío (estado de mínima energía) es \(\phi = 0\), que preserva la simetría \(U(1)\).
Caso 2: \(\mu^2 < 0\) (caso de ruptura espontánea)
Como escribir \(\mu^2 < 0\) es confuso, redefinamos \(\mu^2 = -|\mu|^2\):
Busquemos el mínimo del potencial. Definiendo \(v \equiv |\phi|\):
Las soluciones son \(v = 0\) o \(v^2 = \frac{|\mu|^2}{2\lambda}\).
El valor de \(V\) en \(v = 0\) es \(V(0) = 0\). El valor en \(v = v_0 \equiv \sqrt{\frac{|\mu|^2}{2\lambda}}\) es:
Como \(V(v_0) < V(0) = 0\), el verdadero mínimo no está en \(v = 0\) sino en \(v = v_0\).
🔵 Kai: Vaya, no es el origen el punto más bajo. Al hacer \(\mu^2 < 0\), el origen se convierte más bien en la «cima de una montaña».
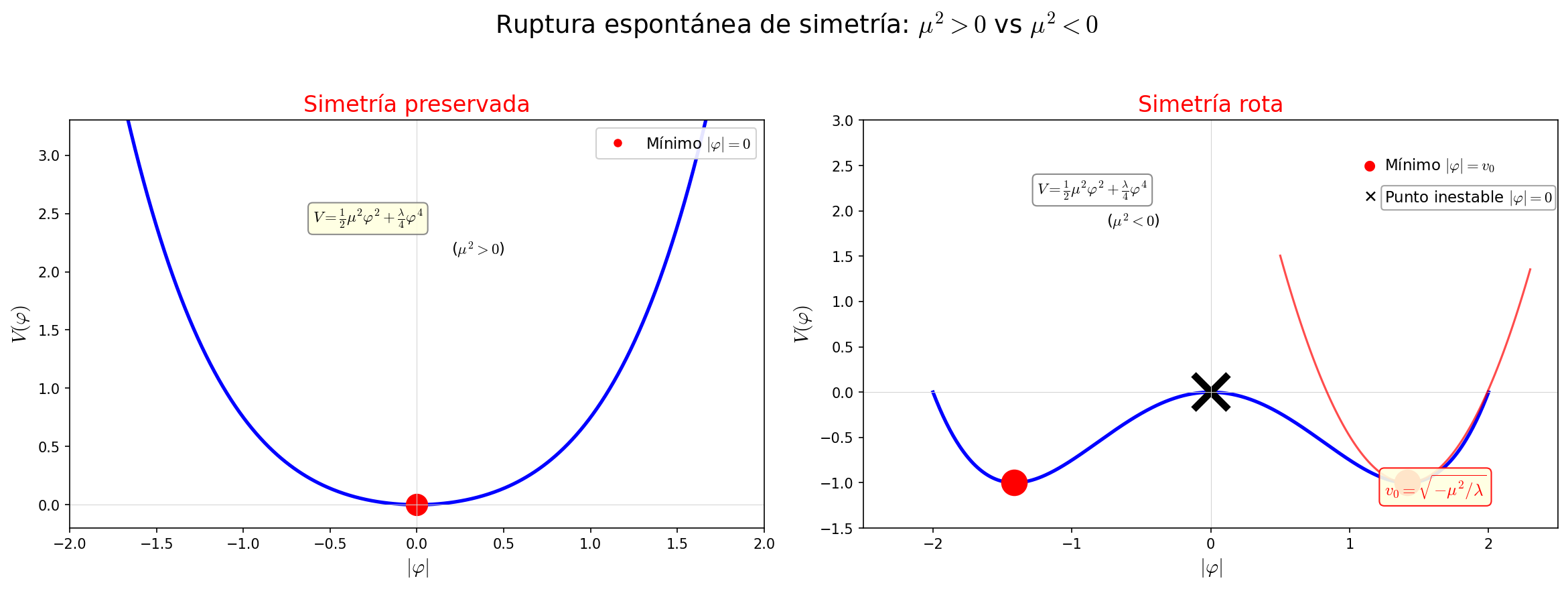
Fig. D.9: Potencial de ruptura espontánea de simetría. Figura D_5: Izquierda: con \(\mu^2 > 0\) el mínimo está en el origen y la simetría se preserva. Derecha: con \(\mu^2 < 0\) el mínimo se aleja del origen y el vacío rompe la simetría.
Donde definimos \(v\) como:
\(v\) se llama valor esperado del vacío (vacuum expectation value, VEV). El mínimo físico es \(|\phi|_{\text{min}} = v/\sqrt{2}\).
🔵 Kai: \(v\) y \(v/\sqrt{2}\) son confusos. ¿Por qué aparece \(\sqrt{2}\)?
🟡 Lina: Buena pregunta. En los cálculos que siguen, se expande el campo alrededor del vacío:
Donde \(h(x)\) y \(\xi(x)\) son fluctuaciones respecto al vacío (\(h = \xi = 0\) es el vacío). La división por \(\sqrt{2}\) es una convención estándar para que los términos cinéticos de \(h\) y \(\xi\) tengan la forma canónica (\(\frac{1}{2}(\partial_\mu h)^2\), etc.). Con esta escritura, en el vacío (\(h = \xi = 0\)) tenemos \(|\phi| = v/\sqrt{2}\), que coincide con el mínimo que acabamos de hallar.
⚪ Mei: Es decir, \(v\) es «una definición para escribir la expansión del campo de forma concisa», y el mínimo físico es \(|\phi|_{\text{min}} = v/\sqrt{2}\).
🟡 Lina: Exacto. De aquí en adelante solo usaremos \(v\) (\(v^2 = |\mu|^2/\lambda\)).
Ahora, pensando en la forma del potencial: \(\phi = 0\) es la «cima de la montaña» y \(|\phi| = v_0\) es el «fondo del valle». Como \(\phi\) es un número complejo, los puntos que satisfacen \(|\phi| = v_0\) forman un círculo en el plano complejo. Comparando Fig. D.9「Potencial de ruptura espontánea de simetría」 para \(\mu^2 > 0\) (izquierda) y \(\mu^2 < 0\) (derecha), se ve que la posición del mínimo se ha desplazado del origen. Además, considerando que \(\phi\) es complejo y dibujando en 3D con los ejes \(\text{Re}\,\phi\) e \(\text{Im}\,\phi\), se obtiene la forma de un «sombrero mexicano» con el centro elevado (Fig. D.10「Potencial tipo sombrero mexicano」). Se puede ver que los mínimos están alineados sobre el círculo \(|\phi| = v/\sqrt{2}\).
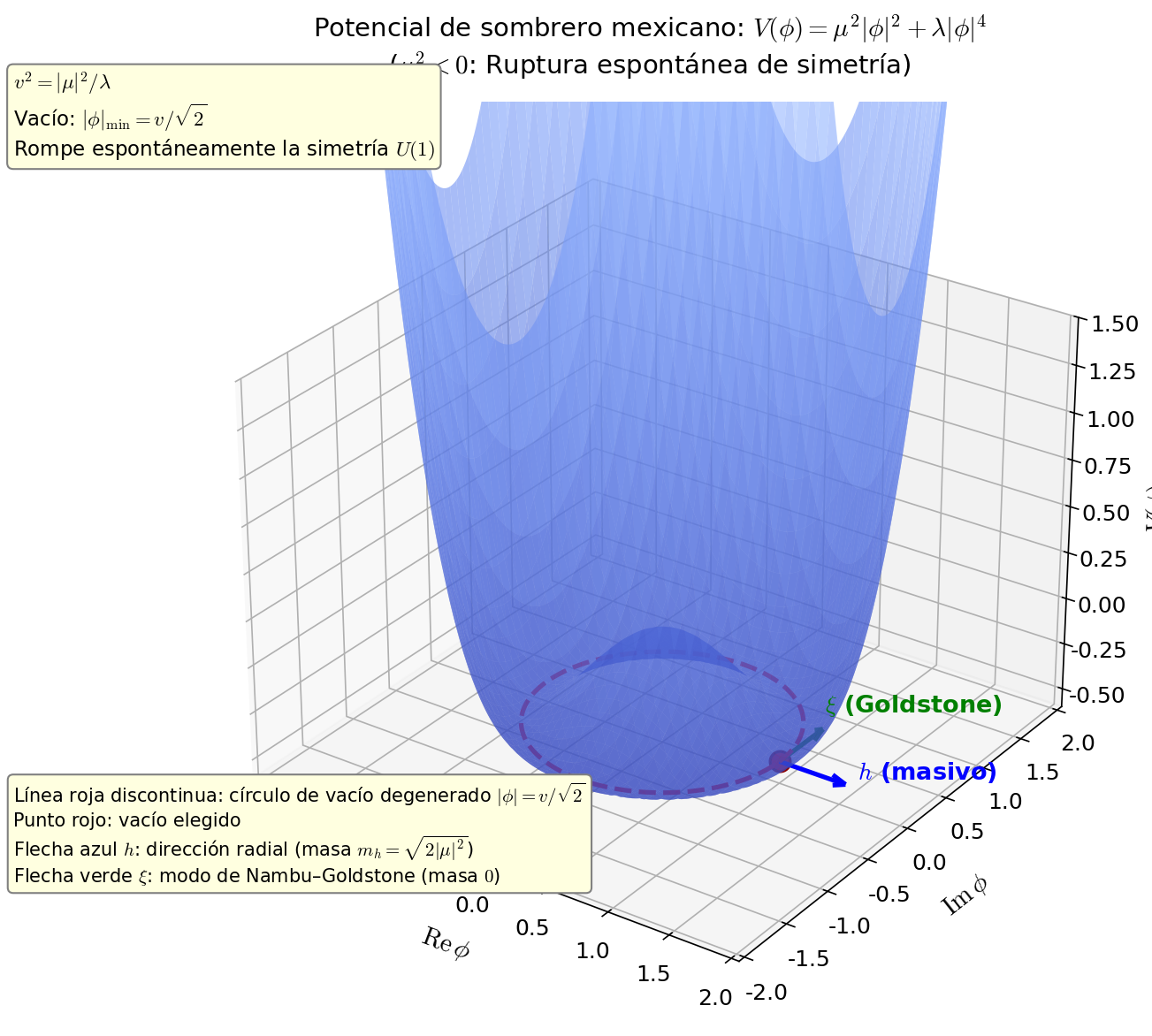
Fig. D.10: Potencial tipo sombrero mexicano. El potencial \(V(\phi) = \mu^2|\phi|^2 + \lambda|\phi|^4\) para \(\mu^2 < 0\), dibujado en 3D con los ejes \(\text{Re}\,\phi\) e \(\text{Im}\,\phi\). El centro está elevado y el verdadero mínimo está sobre el círculo \(|\phi| = v/\sqrt{2}\). El vacío elige un punto del círculo, rompiendo espontáneamente la simetría \(U(1)\).
Ruptura de la simetría¶
El potencial \(V(\phi)\) en sí tiene simetría \(U(1)\) (bajo \(\phi \to e^{i\alpha}\phi\), \(|\phi|^2\) es invariante, así que \(V\) también).
Sin embargo, el estado de vacío elige un punto particular sobre el círculo \(|\phi| = v/\sqrt{2}\). Por ejemplo, supongamos que elegimos \(\phi_0 = v/\sqrt{2}\) (un punto sobre el eje real). Este punto particular se mueve bajo la transformación \(U(1)\), así que el vacío rompe la simetría \(U(1)\).
Esto es la «ruptura espontánea de simetría»:
- La ley (lagrangiano) tiene la simetría
- El estado (vacío) rompe la simetría
Fluctuaciones alrededor del vacío — Modo de Goldstone¶
Expandamos el campo alrededor del vacío \(\phi_0 = v/\sqrt{2}\). Como elegimos un punto sobre el eje real, descomponemos \(\phi\) en parte real e imaginaria:
Cuando \(h = \xi = 0\), \(\phi = v/\sqrt{2}\) (real), que coincide con el vacío elegido. \(h(x)\) es la fluctuación en la «dirección radial» (que cambia \(|\phi|\)), y \(\xi(x)\) es la fluctuación en la «dirección circunferencial» (que cambia solo la fase sin cambiar \(|\phi|\)).
Sustituyamos en el potencial. \(|\phi|^2 = \frac{1}{2}[(v + h)^2 + \xi^2]\), así que sustituyendo en \(V = -|\mu|^2|\phi|^2 + \lambda|\phi|^4\):
Usemos \(v^2 = |\mu|^2/\lambda\) (de la definición del valor esperado del vacío) para expandir. Definiendo \(\rho \equiv (v+h)^2 + \xi^2 = v^2 + 2vh + h^2 + \xi^2\):
Organicemos \(\rho\) por orden en \(h\), \(\xi\). \(\rho = v^2 + 2vh + (h^2 + \xi^2)\), así que busquemos los términos hasta segundo orden. Definiendo \(A = v^2 + 2vh\), \(B = h^2 + \xi^2\), tenemos \(\rho = A + B\) y \(\rho^2 = A^2 + 2AB + B^2\). \(B^2\) es de cuarto orden o superior así que lo ignoramos.
\(A^2 = (v^2 + 2vh)^2 = v^4 + 4v^3 h + 4v^2 h^2\)
\(2AB = 2(v^2 + 2vh)(h^2 + \xi^2)\) se expande como \(2v^2(h^2 + \xi^2) + 4vh(h^2 + \xi^2)\). El primer término es de segundo orden en \(h\), \(\xi\); el segundo es de tercer orden o superior (\(h \cdot h^2 = h^3\) o \(h \cdot \xi^2\)), así que en la aproximación hasta segundo orden lo ignoramos. La parte hasta segundo orden es \(2v^2(h^2 + \xi^2)\).
Sumando los coeficientes de \(h^2\): \(4v^2 + 2v^2 = 6v^2\); de \(\xi^2\): \(2v^2\). Hasta segundo orden:
Sustituyendo en \(V\):
Término constante (\(h = \xi = 0\)): \(-\frac{|\mu|^2}{2}v^2 + \frac{\lambda}{4}v^4\) (energía del vacío, no afecta a la física).
Términos de primer orden (proporcionales a \(h\)): \(-|\mu|^2 v h + \lambda v^3 h = vh(-|\mu|^2 + \lambda v^2) = 0\) (se anula por la condición de vacío \(v^2 = |\mu|^2/\lambda\). Esto refleja que «estamos en un mínimo, así que la pendiente es cero»).
⚪ Mei: Que el término de primer orden sea cero refleja exactamente que «estamos en el fondo del valle así que la pendiente es cero».
🟡 Lina: Exacto. Veamos los términos de segundo orden:
Sustituyendo \(v^2 = |\mu|^2/\lambda\):
Es decir:
🔵 Kai: Vaya, \(h^2\) tiene un coeficiente \(|\mu|^2\), ¡pero el de \(\xi^2\) es \(0\)! ¿Eso tiene algún significado?
🟡 Lina: Mucho. En teoría de campos, el lagrangiano de un campo escalar real tiene la forma \(\mathcal{L} = \frac{1}{2}(\partial_\mu h)^2 - \frac{1}{2}m^2 h^2 - \cdots\), y el término de masa se escribe \(\frac{1}{2}m^2 h^2\) (el \(\frac{1}{2}\) es una normalización estándar que va a la par con el término cinético \(\frac{1}{2}(\partial_\mu h)^2\)). En nuestro caso, como expandimos \(\phi = (v + h + i\xi)/\sqrt{2}\), al expandir el término cinético original \((\partial_\mu\phi)^*(\partial^\mu\phi)\) — como \(\partial_\mu\phi = (\partial_\mu h + i\partial_\mu\xi)/\sqrt{2}\), tenemos \((\partial_\mu\phi)^*(\partial^\mu\phi) = \frac{1}{2}(\partial_\mu h)^2 + \frac{1}{2}(\partial_\mu\xi)^2\), y los términos cinéticos de \(h\) y \(\xi\) tienen la normalización estándar \(\frac{1}{2}\).
🔵 Kai: Es decir, ¿leyendo el coeficiente del segundo orden del potencial se puede saber la masa de la partícula de ese campo?
🟡 Lina: Exacto. En general, el lagrangiano de un campo se escribe como la diferencia entre el término cinético \(\frac{1}{2}(\partial_\mu h)^2\) y el potencial \(V\): \(\mathcal{L} = \frac{1}{2}(\partial_\mu h)^2 - V\). Es la misma estructura que escribir \(\frac{1}{2}m\dot{x}^2 - \frac{1}{2}kx^2\) para la dinámica de un resorte. El término de masa aparece en el lagrangiano como \(-\frac{1}{2}m^2 h^2\) (en el potencial como \(+\frac{1}{2}m^2 h^2\)). La ecuación del movimiento del campo es \(\ddot{h} + m^2 h = 0\), y \(m\) corresponde a la masa de la partícula.
🔵 Kai: Es la misma estructura que \(\ddot{x} + (k/m)x = 0\) del resorte, donde la frecuencia es \(\omega = \sqrt{k/m}\). En el caso del campo, lo que corresponde a la «constante del resorte» es \(m^2\), y eso determina la masa de la partícula.
🟡 Lina: Sí, buena analogía. Nuestro resultado \(V^{(2)} = |\mu|^2 h^2\) es el término de segundo orden del potencial. El lagrangiano del campo es \(\mathcal{L} = \frac{1}{2}(\partial_\mu h)^2 - V\), así que la parte correspondiente a \(h\) es:
El lagrangiano estándar de un campo libre de masa \(m_h\) es \(\frac{1}{2}(\partial_\mu h)^2 - \frac{1}{2}m_h^2 h^2\), así que la parte del potencial es \(V = \frac{1}{2}m_h^2 h^2\). Comparando con nuestro resultado \(V^{(2)} = |\mu|^2 h^2\): \(\frac{1}{2}m_h^2 = |\mu|^2\), es decir:
🔵 Kai: ¡La masa de \(\xi\) es cero! \(h\) tiene masa pero solo \(\xi\) es sin masa.
🟡 Lina: Esto es el teorema de Goldstone: cuando una simetría continua se rompe espontáneamente, para cada generador de la simetría rota aparece una partícula de masa cero (bosón de Goldstone).
Que \(\xi\) tenga masa cero se entiende intuitivamente. Moverse a lo largo del fondo del valle del sombrero mexicano (dirección circunferencial) no requiere energía (el potencial es plano). Moverse alejándose del fondo (dirección radial) sí requiere energía.
🔵 Kai: Entiendo: «dónde estás» en el fondo del valle no afecta la física, así que moverse por ahí no cuesta nada. Por eso aparece una partícula de masa cero. Pero espera, en el mundo real no se han encontrado tantas partículas de masa cero, ¿verdad? Si cada vez que se rompe una simetría sale una partícula de masa cero, debería haber más.
🟡 Lina: Buena duda. De hecho, cuando lo que se rompe es una simetría gauge, la historia cambia. Eso conecta con el mecanismo de Higgs que viene a continuación.
✅ Verificación de comprensión: ¿Qué enuncia el teorema de Goldstone?
Respuesta
Cuando una simetría continua se rompe espontáneamente, para cada generador de la simetría rota aparece una partícula de masa cero (bosón de Goldstone). Corresponde a las fluctuaciones en la dirección a lo largo del fondo del valle del sombrero mexicano.
Puente hacia el mecanismo de Higgs¶
🟡 Lina: Lo veremos en detalle en Cap. 9, pero cuando una simetría gauge se rompe espontáneamente, la situación cambia. El bosón de Goldstone \(\xi\) es «devorado» por el campo gauge, y el campo gauge adquiere masa. Este es el mecanismo de Higgs.
En el Modelo Estándar: - De los 4 generadores de \(SU(2) \times U(1)\), 3 se rompen → 3 bosones de Goldstone - Estos son devorados por los bosones \(W^+\), \(W^-\), \(Z\), que adquieren masa - El generador restante no se rompe → el fotón sigue con masa cero - La fluctuación radial \(h\) es el bosón de Higgs (descubierto en 2012)
✅ Verificación de comprensión: ¿Qué les ocurre a los bosones de Goldstone en el mecanismo de Higgs?
Respuesta
Los bosones de Goldstone son «devorados» por los campos gauge y desaparecen; a cambio, los campos gauge (bosones \(W^+\), \(W^-\), \(Z\)) adquieren masa. La fluctuación radial permanece como el bosón de Higgs.
✅ Verificación de comprensión: ¿Qué es la ruptura espontánea de simetría? Explícalo con la analogía del lápiz.
Respuesta
La ley (ecuaciones) tiene simetría, pero el estado que se realiza elige una dirección particular. Un lápiz de pie puede caer en cualquier dirección (simétrico), pero cuando cae elige una dirección (la simetría se rompe).
✅ Verificación de comprensión: En el potencial tipo sombrero mexicano \(V = \mu^2|\phi|^2 + \lambda|\phi|^4\) (\(\mu^2 < 0\)), ¿cuánto vale el valor esperado del vacío \(|\phi|_{\text{min}}\)?
Respuesta
\(|\phi|_{\text{min}} = \sqrt{|\mu|^2/(2\lambda)}\). Se obtiene derivando el potencial respecto a \(|\phi|\) e igualando a cero. En la notación del texto, con \(v = \sqrt{|\mu|^2/\lambda}\), también se puede escribir \(|\phi|_{\text{min}} = v/\sqrt{2}\).
D.9 Problemas de práctica¶
📝 Ejercicios:
- Verificación de las relaciones de conmutación de los generadores de \(SU(2)\) → Problema B-6. Relación de conmutación de las matrices de Pauli \([\sigma_1, \sigma_2]\), Problema B-7. Relaciones de conmutación de las matrices de Pauli (todas las combinaciones)
- Verificación de las condiciones de grupo → Problema B-1. Grupo aditivo de los enteros, Problema B-2. Grupo multiplicativo de los reales positivos, Problema B-3. La multiplicación de enteros no forma un grupo
- Verificación de las condiciones de grupo de \(U(1)\) → Problema B-4. Condiciones de grupo de \(U(1)\)
- Derivación del número de parámetros de \(SU(N)\) → Problema M-3. Número de parámetros de \(SU(N)\)
- Cálculo de un elemento de \(SU(2)\) a partir de las matrices de Pauli → Problema M-1. Representación exponencial de elementos de \(SU(2)\)
- Regla de composición de matrices de rotación 3D → Problema B-5. Rotación 3D alrededor del eje \(z\)
- Autovalores y autovectores del espín \(1/2\) → Problema B-9. Autovalores y autovectores del espín 1/2
- Antisimetría del conmutador e identidad de Jacobi → Problema B-8. Antisimetría del conmutador, Problema M-2. Identidad de Jacobi (verificación con matrices de Pauli)
Anticipo del próximo capítulo¶
La hoja de mundo de la teoría de cuerdas es bidimensional, y la física allí se describe bellamente en el lenguaje del análisis complejo. Funciones holomorfas, teorema de los residuos, transformaciones conformes — estas herramientas son la base matemática que sustenta la teoría conforme de campos y la expansión del producto de operadores (OPE) de Cap. 16. En Apéndice E prepararemos el núcleo del análisis complejo por el camino más corto.
Referencias¶
- M. Nakahara, Geometry, Topology and Physics, Cap.5 «Grupos de Lie y álgebras de Lie» — Fundamentos matemáticos de la teoría de grupos
- Teoría cuántica de campos (tomo 1), Cap.7 «Principio gauge» — Fundamentos de simetría gauge, teoría gauge \(U(1)\)
- Teoría cuántica de campos (tomo 2), Cap.14 «Ruptura espontánea de simetría» — Matemáticas de SSB, teorema de Goldstone
- Teoría cuántica de campos (tomo 2), Cap.15 «Modelo Estándar y mecanismo de Higgs» — Detalles de \(SU(3) \times SU(2) \times U(1)\)
- Mecánica Cuántica Capítulo 26 «Simetría y leyes de conservación» — Versión de mecánica cuántica del teorema de Noether
- Teoría Cuántica de Campos Capítulo 3 «Teoría clásica de campos» — Versión de teoría de campos del teorema de Noether
- Teoría Cuántica de Campos Capítulo 17 «Teoría de Yang-Mills» — Detalles de simetría gauge no abeliana
- Teoría Cuántica de Campos Apéndice B «Teoría de representaciones del grupo de Lorentz y el grupo de Poincaré» — Detalles del grupo de Lorentz
Feedback on this page
Let us know if something was unclear, incorrect, or could be improved.