Capítulo 2 El plano de la travesía — Tensores y visión general de la ecuación de Einstein¶
Resumen de lo anterior: En Cap. 1 reescribimos el modelo gravitatorio de Newton en el lenguaje de "teoría de campos" y vimos dos limitaciones: el avance del perihelio de Mercurio y el problema estructural de que la ecuación de Poisson carece de derivadas temporales. Para resolver esta contradicción con el principio de la relatividad especial —"no existen señales que superen la velocidad de la luz"—, es necesario revisar los cimientos del modelo de Newton: el "tiempo absoluto" y el "espacio absoluto".
Objetivo de este capítulo
- Este capítulo despliega por adelantado el plano de diseño de la larga travesía desde la relatividad especial hasta la relatividad general
- La derivación detallada de cada ecuación se abordará paso a paso en los capítulos siguientes, pero antes de eso, captar la visión general de "hacia dónde vamos" evita perderse en los senderos de montaña del camino
- En este capítulo introducimos la herramienta para escribir leyes físicas independientes del sistema de coordenadas —los tensores— y ofrecemos una vista panorámica de cómo el modelo gravitatorio de Einstein se compone de dos pilares: la ecuación de movimiento de partículas (ecuación de geodésicas) y la ecuación de campo (ecuación de Einstein)
- A partir del siguiente capítulo, construiremos concretamente desde la primera pieza de este plano de diseño (tensor de rango 0 = intervalo espacio-temporal \(ds^2\))
2.1 Escalares, vectores y tensores¶
🟡 Lina: Primero, empecemos con la idea más importante para aprender la teoría de la relatividad. Un modelo físico no debe depender de la elección del sistema de coordenadas. Ya sea que pongas el origen en Tokio o en París, las leyes de la física deben tener la misma forma —eso es lo que exige el principio de relatividad.
🔵 Kai: Pero las componentes de las coordenadas \((x, y, z)\) cambian según el origen y la orientación de los ejes, ¿no? Por ejemplo, dependiendo de si pones el origen en la esquina del aula o en el escritorio del profesor, la posición del mismo pupitre puede ser \((3, 2, 0)\) o \((1, -1, 0)\).
🟡 Lina: Así es. Pero la distancia entre dos pupitres no cambia sin importar dónde pongas el origen o cómo rotes los ejes de coordenadas, ¿verdad?
🔵 Kai: Es cierto. Las componentes de las coordenadas cambian, pero la distancia no cambia.
🟡 Lina: Entonces, ¿qué pasa con los vectores? Incluso en la física del instituto, las componentes de un vector (flecha) \((v_x, v_y, v_z)\) cambian según la orientación de los ejes de coordenadas, pero la flecha en sí misma era la misma, ¿no?
⚪ Mei: Así es. Lo que tienen en común tanto la distancia como los vectores es que "las componentes cambian con el sistema de coordenadas, pero la cantidad en sí no cambia" —hay algo esencial que no depende de la elección de coordenadas.
🟡 Lina: Exactamente. Resumiendo:
- Cantidades como la distancia, cuyo valor no cambia bajo transformaciones de coordenadas → Escalar (invariante)
- Cantidades como una flecha, cuyas componentes cambian pero la regla de cómo cambian (multiplicar por una matriz de rotación, etc.) está determinada → Vector
La generalización de estos es el tensor —el nombre genérico para cantidades cuyas componentes cambian según una regla determinada bajo transformaciones de coordenadas. El contenido concreto de esa "regla determinada" se aprenderá formalmente en Cap. 6, así que por ahora piensa simplemente en "una cantidad cuya forma de cambiar las componentes sigue una ley".
🔵 Kai: O sea, ¿los escalares y los vectores son miembros de la familia de los tensores, y la diferencia es "el número de veces que se aplica la regla"?
🟡 Lina: Sí, exactamente eso. A grandes rasgos, un escalar no cambia su valor ni siquiera al transformar, un vector cambia sus componentes aplicando la regla de transformación de coordenadas 1 vez, un tensor de rango 2 aplica la misma regla 2 veces (una por cada índice) —el número de veces que se aplica la regla aumenta con el número de índices.
⚪ Mei: Cuantos más índices, más compleja se vuelve la transformación, pero la idea es la misma.
🟡 Lina: Por ejemplo, cuando rotas los ejes de coordenadas 30°, cada componente de un vector cambia a las nuevas componentes multiplicando una vez por la matriz de rotación. Un tensor de rango 2 multiplica por la matriz de rotación tanto en las filas como en las columnas de cada componente de la tabla \(4 \times 4\) —es decir, se aplica 2 veces. Dejo una figura del comportamiento de cada rango de tensor cuando se rotan los ejes de coordenadas (Fig. 2.1「Comportamiento de tensores de cada rango bajo transformaciones de coordenadas (rotación). Izquierda」).
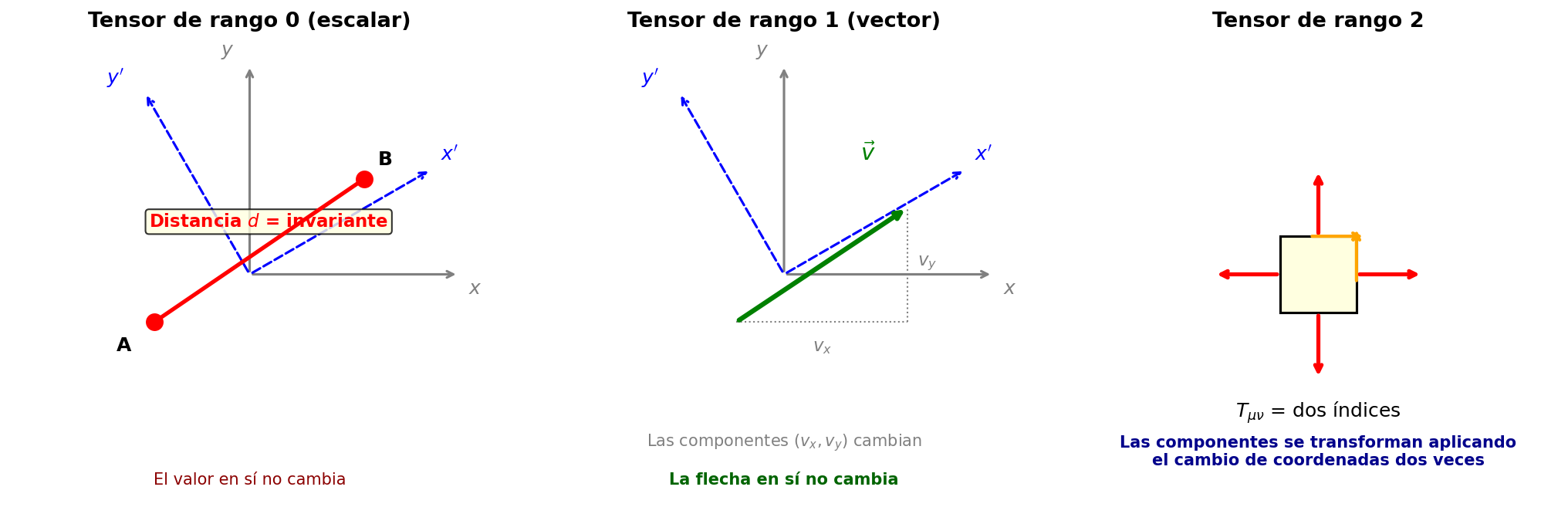
Fig. 2.1: Comportamiento de tensores de cada rango bajo transformaciones de coordenadas (rotación). Izquierda — Rango 0 (escalar): la distancia entre dos puntos no cambia sin importar cómo se roten los ejes. Centro — Rango 1 (vector): las componentes \((v_x, v_y)\) cambian según la orientación de los ejes, pero la flecha en sí es la misma. Derecha — Tensor de rango 2: las componentes cambian aplicando la transformación de coordenadas "2 veces".
Una ecuación escrita en forma tensorial, si se cumple en un sistema de coordenadas, se cumple con la misma forma en todos los sistemas de coordenadas.
✅ Verificación de comprensión: ¿Por qué las ecuaciones escritas en forma tensorial son adecuadas para describir las leyes de la física?
Respuesta
Porque una ecuación escrita en forma tensorial, si se cumple en un sistema de coordenadas, se cumple con la misma forma en todos los sistemas de coordenadas. Esto permite expresar leyes físicas que no dependen de la elección del sistema de coordenadas.
🔵 Kai: ¿Qué son concretamente los tensores?
🟡 Lina: Los tensores tienen un "rango" (rank), y se clasifican por el número de índices que poseen.
🔵 Kai: ¿Los índices son como el \(\mu\) de \(U^\mu\)?
🟡 Lina: Sí. Los índices son "etiquetas que especifican las componentes". Por ejemplo, un vector tridimensional \(\vec{v}\) tiene 3 componentes \((v_x, v_y, v_z)\), ¿verdad? Si lo escribes como \(v^i\) (\(i = 1, 2, 3\)), el índice \(i\) especifica "cuál componente es". En relatividad consideramos un espacio-tiempo de 4 dimensiones que añade 1 dimensión temporal a las 3 espaciales, así que los índices toman 4 valores \(\mu = 0, 1, 2, 3\), donde \(0\) corresponde al tiempo y \(1, 2, 3\) al espacio. Con 1 índice hay 4 componentes, con 2 índices hay \(4 \times 4 = 16\) componentes, y así sucesivamente.
Tabla 2.1: Rango de tensores y ejemplos concretos
| Rango | Nº de índices | Nombre | Ejemplo cotidiano | Ejemplo que aparecerá más adelante |
|---|---|---|---|---|
| Rango 0 | Ninguno | Escalar (invariante) | Distancia entre dos puntos | Intervalo espacio-temporal \(ds^2\) (cap. 3~), tiempo propio \(d\tau\) |
| Rango 1 | 1 | Vector | Fuerza \(\vec{F}\), velocidad \(\vec{v}\) | 4-velocidad \(U^\mu\), 4-momento \(p^\mu\) |
| Rango 2 | 2 | Tensor de rango 2 | (No aparece en el instituto, pero es algo como una tabla de \(4 \times 4\) = una matriz. Ejemplo físico: el esfuerzo que describe la deformación de un cuerpo en cada dirección) | Métrica \(g_{\mu\nu}\) (cap. 6~), \(T_{\mu\nu}\) (cap. 14~) |
⚪ Mei: Es decir, tanto los escalares como los vectores son tipos de tensores.
✅ Verificación de comprensión: ¿Qué determina el "rango" (rank) de un tensor?
Respuesta
Se determina por el número de índices que posee. Rango 0 (sin índices) es un escalar, rango 1 (1 índice) es un vector, rango 2 (2 índices) es un tensor de rango 2.
📝 Ejercicios:
- Identificación del rango tensorial de magnitudes físicas → Problema B-1. Clasificación del rango tensorial de magnitudes físicas
2.2 De la ecuación de movimiento de Newton a los 4-vectores¶
🟡 Lina: En un ejemplo cotidiano, la ecuación de movimiento de Newton \(\vec{F} = m\vec{a}\) es una ecuación escrita con vectores (tensores de rango 1). Sin importar cómo rotes los ejes de coordenadas, se cumple la misma forma —como está escrita en vectores, la invariancia se garantiza automáticamente.
🔵 Kai: En el instituto también descomponíamos la ecuación de movimiento en componentes \(x\) e \(y\): \(F_x = ma_x\), \(F_y = ma_y\). Pero en ese momento, nunca fui consciente de que "si cambio la orientación de los ejes de coordenadas, el valor de \(F_x\) cambiaría".
🟡 Lina: Ese es el punto. En el instituto, una vez que fijabas los ejes de coordenadas, seguías los cálculos sin cambiarlos, así que no había necesidad de pensar "¿qué pasaría en otro sistema de coordenadas?". Pero en relatividad, se exige que las leyes de la física tengan la misma forma entre diferentes sistemas inerciales (inertial frames).
🔵 Kai: ¿Qué es un sistema inercial?
🟡 Lina: Es un sistema de coordenadas que no está acelerado ni rotando. Dicho intuitivamente, es "la perspectiva vista desde un observador que no recibe ninguna fuerza". Para usar una analogía con un tren: tanto el interior de un tren que se mueve a velocidad constante como el andén de la estación son sistemas inerciales. Un tren acelerando o girando en una curva cerrada no es un sistema inercial.
Reformulándolo un poco más en términos físicos, es un sistema de coordenadas en el que un cuerpo sin fuerzas continúa en movimiento rectilíneo uniforme. Como la primera ley de Newton —la ley de inercia— se cumple directamente en él, se llama "sistema inercial". Inversamente, dentro de un tren acelerando, un objeto sin fuerzas (por ejemplo, una lata de café sobre el asiento) parece moverse por sí solo —esto no es un sistema inercial. Además, otro sistema de coordenadas que se mueve en movimiento rectilíneo uniforme respecto a un sistema inercial también es un sistema inercial. No hay un único sistema inercial, sino infinitos. Resumiéndolo en una figura (Fig. 2.2「Diferencia entre sistema inercial y no inercial. Izquierda/Centro」):
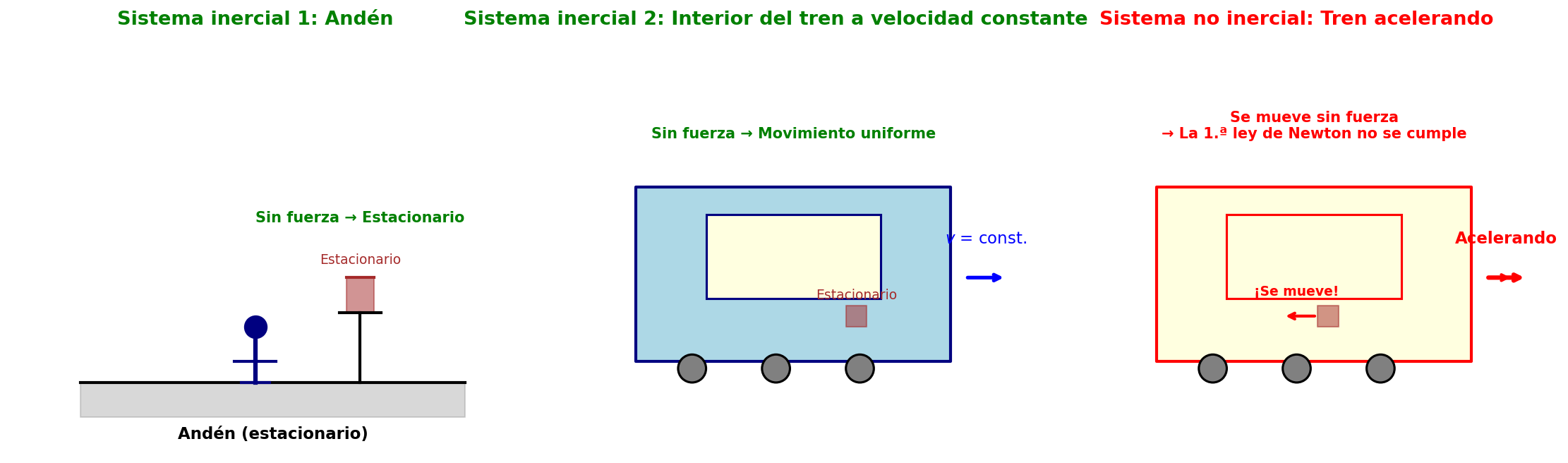
Fig. 2.2: Diferencia entre sistema inercial y no inercial. Izquierda/Centro — Tanto el andén como el tren a velocidad constante son sistemas inerciales: un objeto sin fuerzas permanece en reposo o en movimiento rectilíneo uniforme. Derecha — El tren acelerando es un sistema no inercial: una lata de café sin fuerzas parece moverse por sí sola (la ley de inercia no se cumple).
🔵 Kai: Entiendo, tanto el interior del tren a velocidad constante como el andén son sistemas inerciales, y un tren acelerando no lo es. Se determina verificando si un objeto sin fuerzas continúa en movimiento rectilíneo uniforme.
🟡 Lina: Exacto. Y como \(\vec{F} = m\vec{a}\) está escrita en forma vectorial, la forma de la ecuación no cambia sin importar cómo rotes los ejes de coordenadas —los vectores garantizan automáticamente la invariancia.
⚪ Mei: Esto conecta con la discusión sobre tensores de antes. Como el vector es un tensor de rango 1, aunque las componentes cambien siguiendo las reglas de transformación de coordenadas, la forma de la ecuación se preserva.
🔵 Kai: ¿Y no solo con la rotación, sino que también es lo mismo sin importar dónde pongas el origen?
🟡 Lina: Sí. \(\vec{F} = m\vec{a}\) es una ecuación sobre la aceleración (la segunda derivada de la posición), no sobre la posición misma, así que desplazar el origen no la afecta. Es decir, es invariante tanto bajo rotaciones como traslaciones del espacio.
🔵 Kai: ¿Y qué pasa si cambias la escala de los ejes de coordenadas, por ejemplo, de metros a centímetros?
🟡 Lina: \(\vec{F} = m\vec{a}\) tiene las mismas dimensiones (unidades) en ambos lados, así que al cambiar metros a centímetros, ambos lados cambian por el mismo factor y la igualdad se mantiene. Así que también es invariante bajo cambios de escala.
🔵 Kai: Entonces, ¿qué pasa en un sistema de coordenadas acelerado?
🟡 Lina: En la etapa de la relatividad especial, se establecen ecuaciones cuya forma no cambia entre sistemas inerciales (sistemas de coordenadas en movimiento rectilíneo uniforme). Para tratar sistemas de coordenadas acelerados, se necesita el marco de la relatividad general. En la relatividad general, se pueden escribir ecuaciones con la misma forma en cualquier sistema de coordenadas, aunque esté acelerado o rotando. Lo veremos gradualmente en los capítulos siguientes.
🔵 Kai: Que la forma sea la misma en cualquier sistema de coordenadas es impresionante. Pero entonces, ¿cuál era la razón de limitarse a sistemas inerciales en la relatividad especial? ¿No habría sido mejor escribirlo todo en relatividad general desde el principio?
🟡 Lina: La relatividad general requiere herramientas matemáticas mucho más complejas. Primero entender la relatividad especial que solo se cumple en sistemas inerciales, y después generalizar paso a paso —de esta forma se ve mejor la esencia de la física. De hecho, nuestra travesía también avanzará en ese orden.
🔍 Dive Deep: ¿Si se escribe en tensores, no es invariante bajo todas las transformaciones de coordenadas?
(Este suplemento incluye contenido ligeramente adelantado. Si es difícil, puedes saltarlo y volver después en capítulos posteriores.)
Podrías preguntarte: "Si una ecuación tensorial no cambia de forma bajo cualquier transformación de coordenadas, ¿por qué la relatividad especial se limita a sistemas inerciales?"
En realidad, la forma de una ecuación tensorial efectivamente no cambia bajo cualquier transformación de coordenadas. El problema no está en la forma, sino en las suposiciones físicas contenidas en la ecuación.
La relatividad especial supone que el espacio-tiempo es plano. La herramienta que determina "cómo se mide el espacio-tiempo" —el tensor métrico— toma la forma de una matriz constante determinada en los sistemas inerciales (su contenido concreto se introduce en Cap. 4). Esta suposición solo se cumple en sistemas inerciales. Al pasar a un sistema de coordenadas acelerado, las componentes del tensor métrico varían según el lugar y el tiempo, y ya no puede describirse con un "espacio-tiempo plano".
En la relatividad general, desde el principio se escribe la ecuación usando un tensor métrico general que varía de punto a punto. Por eso la misma forma se cumple en cualquier sistema de coordenadas. Esto se llama covariancia general (general covariance). Por ahora basta con tener en mente que "en la relatividad general las ecuaciones se cumplen con la misma forma incluso fuera de los sistemas inerciales". La forma concreta del tensor métrico se aprenderá en Cap. 4, y las transformaciones de coordenadas generales a partir de Cap. 6.
🟡 Lina: Combinando la explicación anterior con el suplemento Dive Deep, la relatividad especial solo entre sistemas inerciales, la relatividad general en cualquier sistema de coordenadas —el alcance se amplía. Resumido en una tabla:
Tabla 2.2: Alcance de las transformaciones de coordenadas que tratan la relatividad especial y la general
| Relatividad especial | Relatividad general | |
|---|---|---|
| Transformaciones para las que se garantiza la invariancia | Transformaciones entre sistemas inerciales (transformación de Lorentz) | Cualquier transformación de coordenadas |
| Suposición sobre el espacio-tiempo | Plano (sin aceleración ni gravedad) | Puede estar curvado |
| Situaciones que no puede tratar | Sistemas de coordenadas acelerados, gravedad | Ninguna (puede tratar todo) |
| Tensor métrico | Matriz constante (no depende del lugar) | Diferente en cada punto |
🔵 Kai: \(\vec{F} = m\vec{a}\) está escrita en vectores (tensores), así que ya tiene una forma independiente del sistema de coordenadas, ¿no? ¿No es suficiente con eso?
🟡 Lina: Para rotaciones y traslaciones "espaciales", sí. Pero en la relatividad especial, desde la perspectiva de un observador moviéndose a velocidades cercanas a la de la luz, el tiempo y el espacio se mezclan en el concepto de espacio-tiempo —esto lo veremos en detalle en Cap. 3. \(\vec{F}\) y \(\vec{a}\) en \(\vec{F} = m\vec{a}\) son vectores espaciales tridimensionales, así que pueden lidiar con rotaciones espaciales, pero no pueden lidiar con el cambio de sistema inercial (transformaciones que mezclan tiempo y espacio). Si representamos esta diferencia en una figura (Fig. 2.3「Alcance de correspondencia entre vectores tridimensionales y 4-vectores. Izquierda」):
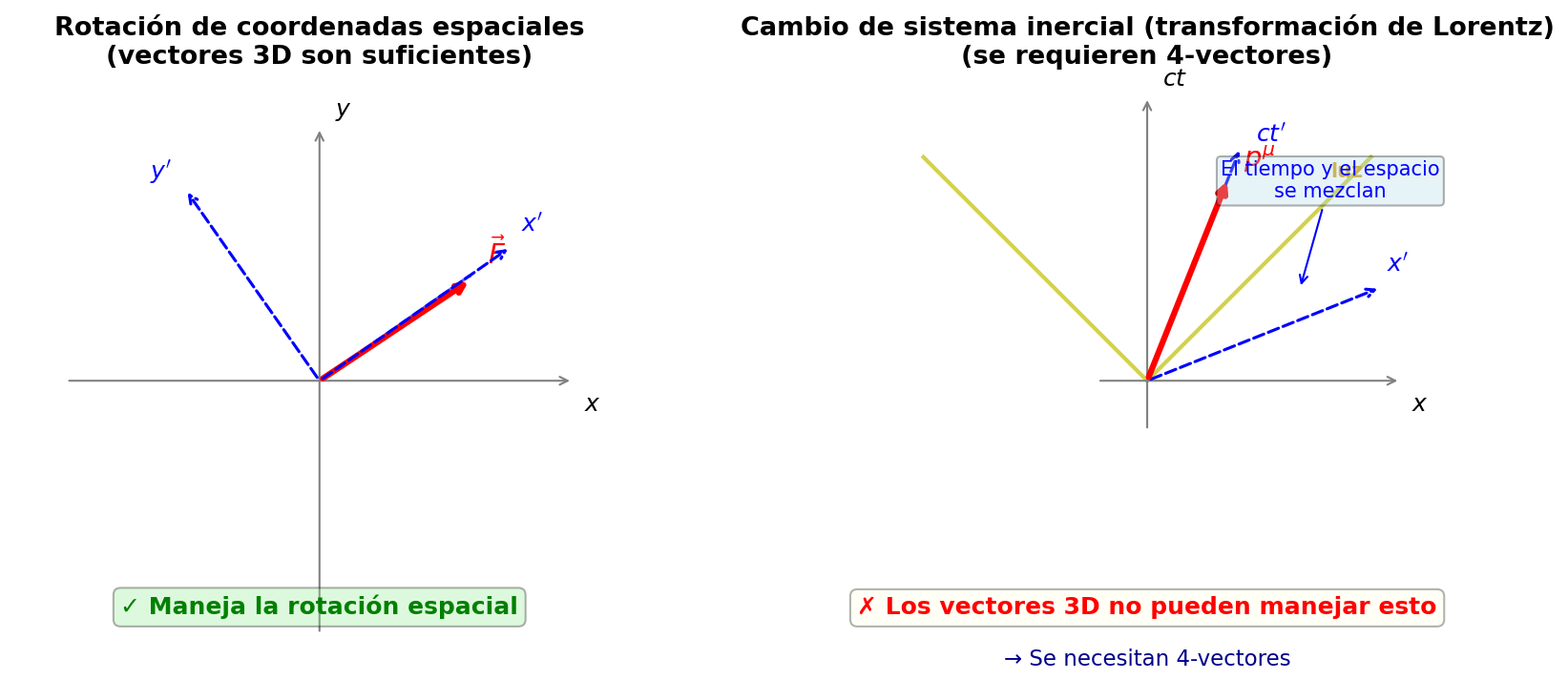
Fig. 2.3: Alcance de correspondencia entre vectores tridimensionales y 4-vectores. Izquierda — En rotaciones de coordenadas espaciales, solo cambian las componentes del vector tridimensional y la forma de la ecuación se preserva. Derecha — En el cambio de sistema inercial (transformación de Lorentz), el eje temporal y el espacial se mezclan, por lo que no puede describirse con vectores tridimensionales. Se necesitan 4-vectores que incluyan la componente temporal.
Por eso es necesario extender a vectores de 4 dimensiones — 4-vectores (tensores de rango 1) — añadiendo la componente temporal. La versión relativista de la ecuación de movimiento de Newton es
🔵 Kai: ¡Vaya, se parece mucho a la ecuación de Newton! ¿Solo cambia \(\vec{F}\) a \(f^\mu\) y \(\vec{a}\) a \(\frac{d^2 x^\mu}{d\tau^2}\)?
🟡 Lina: Sí, compárala con la de Newton \(\vec{F} = m\vec{a} = m\frac{d^2 \vec{r}}{dt^2}\). La fuerza \(\vec{F}\) corresponde a la 4-fuerza \(f^\mu\), y la aceleración \(\frac{d^2 \vec{r}}{dt^2}\) corresponde a \(\frac{d^2 x^\mu}{d\tau^2}\) —la posición tridimensional \(\vec{r}\) se reemplaza por las coordenadas de 4 dimensiones \(x^\mu\), y el tiempo absoluto \(t\) por el tiempo propio \(\tau\). El índice \(\mu\) (mu) toma 4 valores \(0, 1, 2, 3\). \(x^1, x^2, x^3\) corresponden a las coordenadas espaciales \(x, y, z\), y \(x^0\) es la coordenada relacionada con el tiempo (su definición concreta se introduce en Cap. 3). Es decir, esta única ecuación representa simultáneamente 4 ecuaciones del tiempo y el espacio. Y esta ecuación no cambia de forma al cambiar de sistema inercial.
Nota sobre la notación: El \(\tau\) (tau) del denominador es el tiempo propio (proper time) —el tiempo que marca un reloj que se mueve junto con la partícula. En la mecánica newtoniana, el tiempo es el mismo para todos los observadores (tiempo absoluto), así que solo había \(t\), pero en la relatividad especial, como cada observador mide el tiempo de forma diferente, es necesario distinguir entre el tiempo del reloj propio de la partícula \(\tau\) y el tiempo coordenado \(t\) visto desde cierto sistema inercial. La definición estricta y la relación con \(t\) se introducen en Cap. 3, así que por ahora piensa en él como "la versión relativista del \(t\) de Newton".
✅ Verificación de comprensión: ¿Por qué es necesario extender la ecuación de movimiento de Newton a 4-vectores? ¿Qué es insuficiente en la forma vectorial tridimensional \(\vec{F} = m\vec{a}\)?
Respuesta
Los vectores tridimensionales son invariantes bajo rotaciones espaciales, pero en la relatividad especial no pueden lidiar con el cambio de sistema inercial (transformación de Lorentz) donde tiempo y espacio se mezclan. Al convertirlos en 4-vectores añadiendo la componente temporal, la forma de la ecuación se mantiene invariante al cambiar de sistema inercial.
🔵 Kai: Entiendo que \(\mu = 1, 2, 3\) corresponde a \(F_x = ma_x\) de Newton, etc. Pero ¿qué representa la componente temporal \(\mu = 0\)?
🟡 Lina: La componente \(\mu = 0\) se convierte en una ecuación relacionada con la energía. La componente temporal de la 4-fuerza corresponde a la tasa de cambio de la energía de la partícula —es decir, la potencia. Lo derivaremos en detalle cuando aprendamos los 4-vectores en Cap. 4, así que por ahora solo recuerda que "al extender de 3 a 4 dimensiones, la ley del movimiento y la ley de la energía se unifican en una sola ecuación".
⚪ Mei: Es decir, \(\mu = 1, 2, 3\) son las ecuaciones del movimiento en las direcciones espaciales, y \(\mu = 0\) es la ecuación de la energía —ambas están contenidas en una sola ecuación.
🟡 Lina: Exacto. Al unificarse el tiempo y el espacio, la ley del movimiento y la ley de la energía se combinan en una sola ecuación —esa es la belleza de la relatividad especial. \(E = mc^2\) también surge naturalmente de esta estructura.
🔵 Kai: ¿\(E = mc^2\) surge naturalmente? ¿Cómo...?
🟡 Lina: Surge al calcular la "longitud" de un vector llamado 4-momento. La derivación concreta la haremos en Cap. 4, así que espéralo con ganas.
🔵 Kai: La "longitud" de un vector... en 3 dimensiones es \(|\vec{v}| = \sqrt{v_x^2 + v_y^2 + v_z^2}\), pero en 4 dimensiones también entra la componente temporal, así que debe haber algo diferente. Lo esperaré con ganas. ...Pero lo que me preocupa es que esta ecuación del 4-vector \(f^\mu = m\frac{d^2 x^\mu}{d\tau^2}\) tiene la estructura de "si se da la fuerza, se conoce el movimiento", ¿verdad? Si intentamos meter la gravedad en \(f^\mu\), ¿no acabaríamos simplemente reescribiendo la gravedad de Newton en 4 dimensiones? ¿Se resolvería así el problema de Cap. 1?
🟡 Lina: Buena pregunta. De hecho, para tratar la gravedad se necesita un salto más. Lo veremos en la siguiente sección.
✅ Verificación de comprensión: Al extender la ecuación de movimiento de Newton \(\vec{F} = m\vec{a}\) a la relatividad especial, es necesario pasar de vectores tridimensionales a 4-vectores. ¿A qué corresponde físicamente la componente \(\mu = 0\) que se añade?
Respuesta
Corresponde a una ecuación relacionada con la energía (potencia). Al unificarse el tiempo y el espacio, la ley del movimiento y la ley de la energía se combinan en una sola ecuación.
📝 Ejercicios:
- Razones por las que un vector tridimensional solo espacial es insuficiente → Problema B-2. Limitaciones de la ecuación de movimiento de Newton
2.3 La gravedad no es una fuerza sino curvatura del espacio-tiempo¶
🔵 Kai: Entonces, ¿no está ya resuelto? Si reescribimos la ecuación de movimiento de Newton con 4-vectores, ¿no tenemos una ecuación gravitatoria compatible con la relatividad?
🟡 Lina: Buena pregunta, pero en realidad eso no es suficiente. Esta ecuación determina "cómo se mueve una partícula cuando se da la fuerza \(f^\mu\)". El problema es cómo meter la gravedad en la fuerza del lado izquierdo.
🔵 Kai: ¿No basta con meter la gravedad de Newton \(F = -GMm/r^2\) directamente en \(f^\mu\)? Solo habría que reescribir la forma como 4-vector.
🟡 Lina: Esa es la idea natural. Pero como vimos en Cap. 1, la gravedad de Newton era una "acción a distancia que se transmite instantáneamente". Aunque reescribas la forma como 4-vector, el mecanismo de propagación en sí no cambia —mientras se trate la gravedad como una "fuerza", persiste el problema de "cómo se transmite esa fuerza". Aquí está la percepción revolucionaria de Einstein.
⚪ Mei: Es decir, simplemente reescribir la forma de la fuerza de manera relativista no elimina el problema estructural.
🟡 Lina: Exacto. Entonces la respuesta de Einstein es describir la gravedad no como una fuerza sino como curvatura del espacio-tiempo. La curvatura del espacio-tiempo se determina por la ecuación de campo (ecuación de Einstein), y esa ecuación es consistente con la relatividad especial —es decir, los cambios en la curvatura del espacio-tiempo se propagan a velocidad \(c\) o menor. Estas son las ondas gravitacionales. El problema de "transmisión instantánea" se resuelve naturalmente al describir la gravedad mediante una ecuación de campo.
Y en un espacio-tiempo curvado, las partículas simplemente avanzan sin recibir fuerza a lo largo de geodésicas (la "trayectoria recta" dentro del espacio-tiempo curvado). La gravedad no es una fuerza, sino que se absorbe en la geometría del espacio-tiempo.
Nota: Algunos libros de texto explican "geodésica" como "camino más corto", pero con precisión es un camino estacionario —un camino tal que al variarlo ligeramente, el cambio de cierta cantidad es cero. Recuerda el principio de mínima acción que aprendimos en Cap. 1: la trayectoria que satisface la variación de la acción \(\delta S = 0\) es la trayectoria realizada. Las geodésicas tienen la misma estructura: "la trayectoria cuya variación del tiempo propio es cero". En el instituto aprendiste los máximos y mínimos de \(y = f(x)\), que eran "los puntos donde la derivada es cero —es decir, puntos donde al desplazar \(x\) ligeramente, el cambio en \(y\) es cero". Aquí se aplica la misma idea a "trayectorias": "una trayectoria tal que al cambiarla ligeramente, el cambio en el tiempo propio (a primer orden) es cero" es la geodésica. Tiene la misma estructura que el principio de mínima acción aprendido en Cap. 1. En geometría puramente espacial, la geodésica es el camino más corto, pero en geometría espacio-temporal la situación es diferente: la geodésica de una partícula con masa es la trayectoria que maximiza el tiempo propio. Intuitivamente, "cuanto más se desvía, más corto se hace el tiempo propio", así que la geodésica que va "recta" es el máximo. Que "desviarse acorte el tiempo" va contra la intuición cotidiana, pero es el mismo fenómeno que la "dilatación temporal" de la relatividad especial —un reloj en movimiento avanza más lento, es decir, cuanto más se mueve extra (se desvía), más corto es el tiempo marcado por el propio reloj de la partícula (tiempo propio)— se aprenderá en detalle en Cap. 3.
🔵 Kai: ¿Las partículas se mueven curvadas sin que haya fuerza?
🟡 Lina: Para entender eso, déjame presentarte la perspectiva del diagrama espacio-temporal. Es un diagrama con el espacio \((x, y)\) en el eje horizontal y el tiempo en el eje vertical. La trayectoria que un objeto traza en un diagrama espacio-temporal se llama línea de mundo (world line) —ya sea que esté quieto o en movimiento, el tiempo fluye, así que todo objeto extiende su trayectoria hacia arriba (hacia el futuro) en el diagrama.
🔵 Kai: El eje vertical está marcado como \(ct\), pero ¿por qué \(ct\) y no \(t\)?
🟡 Lina: El eje espacial está en metros, pero si el eje temporal está en segundos, las dimensiones son diferentes y no puedes dibujarlos en el mismo diagrama. Entonces se usa \(ct\), que es el tiempo \(t\) multiplicado por la velocidad de la luz \(c\). \(c \times t\) es "la distancia que la luz recorre en \(t\) segundos", así que la unidad es metros —la misma dimensión que el espacio. Veamos la figura (Fig. 2.4「Geodésicas en espacio-tiempo plano y curvado. El eje vertical es el tiempo \(ct\), los dos ejes horizontales \((x, y)\) son el espacio. Izquierda」).
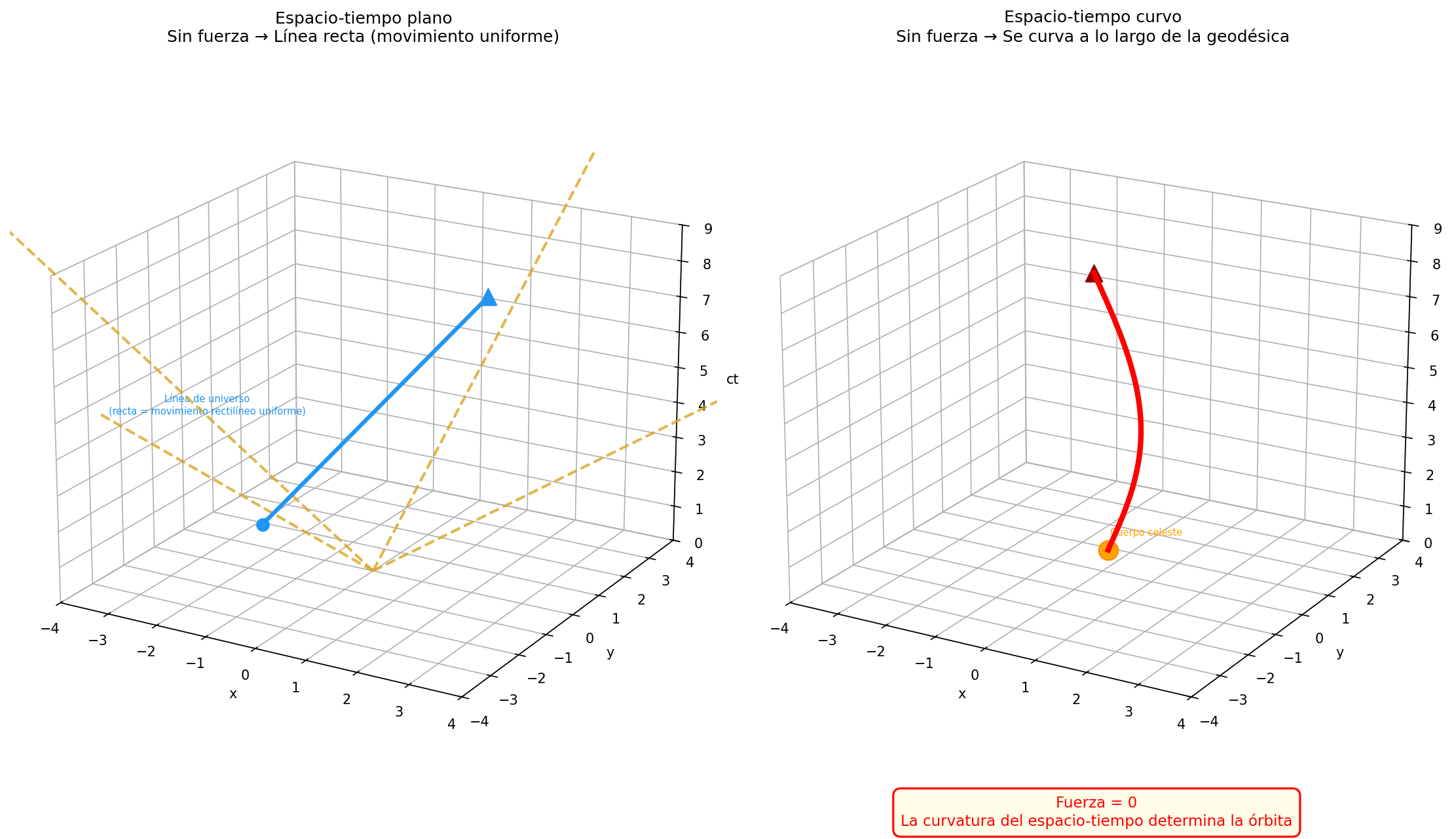
Fig. 2.4: Geodésicas en espacio-tiempo plano y curvado. El eje vertical es el tiempo \(ct\), los dos ejes horizontales \((x, y)\) son el espacio. Izquierda — En espacio-tiempo plano, una partícula sin fuerza traza una línea de mundo recta en el espacio-tiempo. Esto corresponde al movimiento rectilíneo uniforme. Derecha — En el espacio-tiempo curvado alrededor de un cuerpo celeste, la línea de mundo se curva incluso sin recibir fuerza. Esta es la geodésica —lo "recto" dentro del espacio-tiempo curvado. La línea discontinua amarilla es la línea de mundo de la luz (sección del cono de luz, línea a 45°), y la línea de mundo de una partícula con masa es más vertical que esta (no supera la velocidad de la luz).
🟡 Lina: El punto importante es que todos los objetos avanzan inevitablemente en la dirección temporal (hacia arriba en el eje \(ct\)). Ya estén quietos o en movimiento, el tiempo fluye —en el diagrama espacio-temporal, eso corresponde a que la trayectoria del objeto se extiende en la dirección \(ct\).
⚪ Mei: La línea de mundo de un objeto en reposo avanza verticalmente a lo largo del eje \(ct\). Un objeto en movimiento rectilíneo uniforme también se desplaza en la dirección espacial a una tasa constante, así que se convierte en una línea recta inclinada.
🟡 Lina: Exacto. El lado izquierdo de la figura es precisamente eso. La línea recta azul es la línea de mundo de una partícula en movimiento rectilíneo uniforme —a medida que pasa el tiempo, la posición espacial se desplaza a una tasa constante, así que es una línea recta inclinada. Como no actúa ninguna fuerza, la línea de mundo no se curva.
🔵 Kai: ¿Cómo se lee el lado derecho?
🟡 Lina: El lado derecho es el caso donde el espacio-tiempo está curvado. Aunque la partícula no recibe fuerza, a medida que avanza en la dirección \(ct\), se desplaza en la dirección espacial —la línea de mundo se curva. Lo que está curvado no es la trayectoria de la partícula, sino el espacio-tiempo mismo. La partícula simplemente avanza "recto" (a lo largo de la geodésica) dentro del espacio-tiempo curvado. Es la misma idea que cuando caminas "recto" sobre la superficie de la Tierra, pero como la Tierra es redonda, tu trayectoria es una curva.
Además, ¿notaste la línea discontinua amarilla en la figura? Es la trayectoria de la luz —la línea de mundo de la luz. Como el eje espacial y el eje \(ct\) tienen las mismas unidades, la luz traza una línea recta a 45°. Las partículas con masa son más lentas que la luz, así que su línea de mundo avanza en una dirección más vertical (más cercana al eje \(ct\)) que 45°. El cono formado por esta línea a 45° se llama cono de luz (light cone). Lo aprenderemos en detalle en Cap. 3.
🔵 Kai: ¿Cómo se escribe en ecuaciones lo de avanzar "recto" dentro de un espacio-tiempo curvado?
🟡 Lina: En la ecuación de movimiento de Newton, cuando la fuerza es cero \(\vec{F} = 0\), \(\vec{a} = 0\) —es decir, movimiento rectilíneo uniforme. Esto es "lo recto en espacio plano". Extendiéndolo a 4 dimensiones: \(\frac{d^2 x^\mu}{d\tau^2} = 0\) —aceleración cero. Pero cuando el espacio-tiempo está curvado, el significado mismo de "recto" cambia. En espacio-tiempo curvado, que la aceleración en coordenadas sea cero no significa necesariamente que sea recto, y a la inversa, puede verse como acelerado en coordenadas pero ser recto en el espacio-tiempo.
🔵 Kai: ¿Acelerando en coordenadas pero realmente recto...? Suena como una paradoja.
🟡 Lina: Por ejemplo, una manzana en caída libre se ve desde el sistema de coordenadas terrestre como cayendo con aceleración \(g\), pero desde la perspectiva de Einstein no recibe ninguna fuerza —simplemente avanza recto en el espacio-tiempo curvado a lo largo de una geodésica. Dicho al revés, somos nosotros los que estamos de pie en el suelo quienes estamos acelerando, recibiendo una fuerza del suelo (la fuerza normal) —es decir, estamos siendo desviados de la "trayectoria recta en el espacio-tiempo curvado" (geodésica).
Por eso, para determinar si algo "realmente avanza recto" en espacio-tiempo curvado, no basta con la aceleración coordenada \(\frac{d^2 x^\mu}{d\tau^2}\) sola —se necesita un término de corrección que compense la curvatura y distorsión del propio sistema de coordenadas. Ese término de corrección depende de la velocidad de la partícula (en qué dirección y cuán rápido avanza).
Piénsalo en la superficie de la Tierra. Si caminas hacia el este sobre el ecuador, avanzas a lo largo de un paralelo, que en un mapa parece una línea recta pero en realidad está curvado. En cambio, si caminas hacia el norte desde el mismo lugar, avanzas a lo largo de un meridiano —la curvatura es diferente. Es decir, "en qué dirección avanzas" cambia la forma de la corrección. Además, si caminas en diagonal hacia el noreste, ambas componentes, la norte y la este, contribuyen —la corrección se determina por la combinación de "cuánto avanzas en dirección norte" y "cuánto avanzas en dirección este".
⚪ Mei: Es decir, la magnitud de la corrección cambia tanto con la "dirección de avance" como con la "velocidad de avance".
🟡 Lina: Exacto. En el espacio-tiempo de 4 dimensiones es igual: todas las combinaciones de la velocidad en dirección \(\alpha\) y la velocidad en dirección \(\beta\) (\(\alpha, \beta\) recorriendo cada uno \(0, 1, 2, 3\)) contribuyen a la corrección. Si quieres una intuición de por qué es un "producto": cuando caminas en diagonal hacia el noreste, la corrección es proporcional simultáneamente a ambas, "cuánto avanzas en dirección norte" y "cuánto avanzas en dirección este" —si una es cero, la corrección diagonal también desaparece, así que tiene forma de multiplicación y no de suma. Por ejemplo, si la velocidad en dirección norte es \(v_N\) y en dirección este es \(v_E\), la corrección específica de la dirección diagonal es proporcional a \(v_N \times v_E\). Si caminas al norte puro (\(v_E = 0\)), la corrección diagonal es cero; si caminas al este puro (\(v_N = 0\)), también es cero —solo actúa cuando ambas son simultáneamente distintas de cero. Por supuesto, al caminar al norte puro también hay una corrección propia de la dirección norte (un término proporcional a \(v_N \times v_N\)) —incluyendo los casos donde \(\alpha\) y \(\beta\) son la misma dirección, se suman todas las combinaciones.
🔵 Kai: Ya veo, se incluyen tanto los productos de la misma dirección como los de direcciones diferentes. En 4 dimensiones debe haber muchas combinaciones...
🟡 Lina: Sí, como \(\alpha\) y \(\beta\) recorren cada uno \(0, 1, 2, 3\), la suma tiene \(4 \times 4 = 16\) términos. En forma de ecuación es \(\Gamma^\mu_{\alpha\beta}\frac{dx^\alpha}{d\tau}\frac{dx^\beta}{d\tau}\) (\(\Gamma^\mu_{\alpha\beta}\) es un coeficiente que representa "la intensidad de la corrección en cada punto" —su contenido lo explico enseguida). Si lo escribimos explícitamente con el símbolo \(\Sigma\) (sigma), significa \(\sum_{\alpha=0}^{3}\sum_{\beta=0}^{3}\Gamma^\mu_{\alpha\beta}\frac{dx^\alpha}{d\tau}\frac{dx^\beta}{d\tau}\). En relatividad, se omite este \(\Sigma\) y se usa la convención de que "cuando el mismo índice aparece arriba y abajo, se suma" —esta notación abreviada (convenio de suma de Einstein) la explico formalmente un poco más adelante.
🔵 Kai: Espere, ¿la persona que está de pie en el suelo está acelerando? ¿Aunque no se mueve?
🟡 Lina: Suena raro en la intuición cotidiana. Pero recuerda —si sostienes un acelerómetro (que también está dentro de tu smartphone) y te dejas caer libremente, el acelerómetro marca cero. ¿Por qué? Porque los resortes y sensores dentro del acelerómetro también caen juntos, así que el resorte no se comprime = no detecta fuerza. Al contrario, cuando estás de pie en el suelo, el acelerómetro marca \(g\) hacia arriba —porque el suelo está empujando el sensor hacia arriba. Es decir, "quien realmente no recibe fuerza (aceleración cero)" es la manzana cayendo, y la persona de pie en el suelo está siendo constantemente empujada hacia arriba por la fuerza normal —esa es la perspectiva de Einstein. "Aceleración" aquí significa estar desviado de la geodésica (la trayectoria recta en el espacio-tiempo curvado) —la persona de pie en el suelo está siendo continuamente desviada de la trayectoria de caída libre por la fuerza normal. Lo profundizaremos en Cap. 5 al estudiar el principio de equivalencia. Lo importante aquí y ahora es que el hecho de que "la manzana parece acelerar" en el sistema de coordenadas terrestre se debe a que el propio sistema de coordenadas está acelerando (empujado por el suelo). El término \(\Gamma\) se encarga de esa corrección. Como resultado, lo "recto" en espacio-tiempo curvado —la ecuación de geodésicas— queda así:
🔵 Kai: ¿Qué representa cada término de esta ecuación?
🟡 Lina: El primer término \(\frac{d^2 x^\mu}{d\tau^2}\) es la aceleración de la partícula —lo correspondiente a \(\vec{a}\) de Newton. El \(\frac{dx^\alpha}{d\tau}\) del segundo término es la velocidad de la partícula (4-velocidad) —lo correspondiente a \(\vec{v}\) de Newton— y así como en mecánica newtoniana se derivaba la posición respecto al tiempo \(t\) para obtener la velocidad \(\frac{dx}{dt}\), en relatividad se deriva respecto al reloj propio de la partícula \(\tau\). El \(\Gamma^\mu_{\alpha\beta}\frac{dx^\alpha}{d\tau}\frac{dx^\beta}{d\tau}\) en su totalidad representa el efecto que la geometría del espacio-tiempo —tanto la curvatura como la elección del sistema de coordenadas— tiene sobre el movimiento de la partícula.
🔵 Kai: ¿El hecho de que \(\alpha\) y \(\beta\) recorran ambos \(0, 1, 2, 3\) significa que están incluidas todas las combinaciones de las componentes de velocidad?
🟡 Lina: Sí. Se suman todas las combinaciones de velocidad en dirección \(\alpha\) × velocidad en dirección \(\beta\) —la regla de por qué se "lee como suma" la explico enseguida. En cuanto al significado físico, dependiendo de en qué dirección y cuán rápido se mueve la partícula, cambia la forma en que recibe el efecto geométrico. Es igual que el ejemplo de la superficie terrestre de antes: dependiendo de en qué dirección y cuán rápido avanzas en el espacio-tiempo, cambia cómo se curva la trayectoria.
🔵 Kai: ¿Qué es \(\Gamma^\mu_{\alpha\beta}\)?
🟡 Lina: \(\Gamma^\mu_{\alpha\beta}\) (gamma, coeficientes de conexión) es una cantidad que se determina a partir del tensor métrico \(g_{\mu\nu}\) y sus derivadas —es decir, la tasa de cambio de \(g_{\mu\nu}\) a lo largo de las coordenadas \(x\) o \(y\). El tensor métrico es un tensor de rango 2 que define "cómo se miden las distancias" en cada punto del espacio-tiempo —la cantidad con forma de "tabla de \(4 \times 4\)" que vimos en la tabla de la sección anterior.
⚪ Mei: ¿Es como imaginar que la escala de un mapa cambia según el lugar?
🟡 Lina: Exactamente así. A modo de analogía, es como un mapa cuya escala varía según el lugar —en espacio-tiempo plano la escala es la misma en todas partes, pero en espacio-tiempo curvado el significado de "1 metro" cambia de un punto a otro. Esa "tabla de escalas según el lugar" es el tensor métrico. \(\Gamma\) puede pensarse como la cantidad que representa "cómo cambia la escala de un lugar a otro" —es decir, la tasa de cambio de la tabla de escalas. La ecuación del intervalo espacio-temporal \(ds^2\) que aparece al final de este capítulo es la expresión más sencilla del tensor métrico —la introduciremos en detalle en capítulos posteriores. El nombre "conexión" viene de que es la herramienta para comparar (conectar) vectores en diferentes puntos del espacio-tiempo curvado.
⚪ Mei: ¿"Conectar" en qué sentido?
🟡 Lina: Por ejemplo, en la superficie de la Tierra, si una persona en el Polo Norte y otra en el ecuador tienen cada una una flecha apuntando "hacia el norte", al intentar comparar esas dos flechas, la curvatura de la esfera impide una comparación simple —los coeficientes de conexión proporcionan la "regla de conexión". Lo aprenderemos en detalle en Cap. 8. Además, \(\Gamma\) es la letra griega gamma y su forma se parece a la \(T\) mayúscula del alfabeto, pero es algo completamente diferente del tensor energía-momento \(T_{\mu\nu}\) que aparecerá más adelante, así que ten cuidado.
Organizo el significado de cada término de la ecuación de geodésicas (Fig. 2.5「Rol de cada término en la ecuación de geodésicas」).
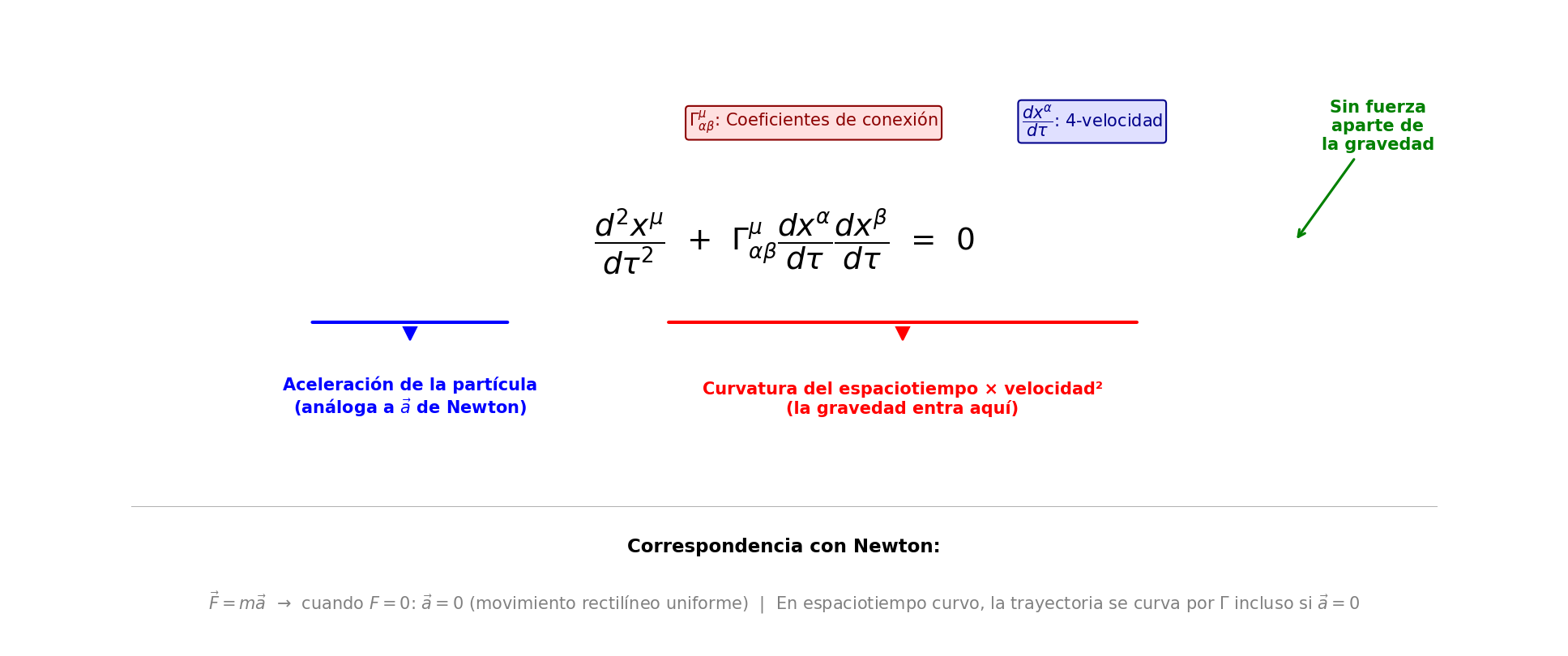
Fig. 2.5: Rol de cada término en la ecuación de geodésicas. El primer término es la aceleración de la partícula (correspondiente a \(\vec{a}\) de Newton), el segundo término es el efecto de la geometría del espacio-tiempo sobre el movimiento de la partícula (la gravedad se absorbe aquí), y que el lado derecho sea cero indica que no hay fuerzas aparte de la gravedad.
Además, en el segundo término \(\alpha\) y \(\beta\) aparecen tanto arriba como abajo, ¿verdad? Viéndolo concretamente, en \(\Gamma^\mu_{\alpha\beta}\) el \(\alpha\) está abajo, y en \(\frac{dx^\alpha}{d\tau}\) el \(\alpha\) está arriba.
🔵 Kai: Un momento. \(x^\alpha\), ¿no es \(x\) elevado a la potencia \(\alpha\)?
🟡 Lina: Buena pregunta. En el instituto \(x^2\) es "\(x\) al cuadrado", pero en relatividad la convención es escribir la etiqueta de componente del coordinado como superíndice. Así que \(x^2\) significa "la segunda componente de las coordenadas (dirección \(y\))". Es confuso con las potencias, pero se distingue por contexto —en ecuaciones de relatividad, si los índices son letras griegas como \(\mu, \nu, \alpha, \beta\), es casi seguro que son etiquetas de componentes. Cuando son números, dentro de ecuaciones tensoriales también se leen como etiquetas de componentes.
🔵 Kai: Parece que me confundiré hasta acostumbrarme, pero entendido. Y otra cosa, ¿qué diferencia hay entre que un índice esté arriba y que esté abajo?
🟡 Lina: Por ahora, piensa que "los índices que están arriba y los que están abajo tienen diferentes reglas de cambio bajo transformaciones de coordenadas". Los índices superiores se llaman contravariantes (contravariant) y los inferiores covariantes (covariant), pero su significado preciso lo aprenderemos en Cap. 6. Lo importante aquí y ahora es la regla de que cuando el mismo índice aparece una vez arriba y una vez abajo, se suma sobre ese índice —esto se llama el convenio de suma de Einstein (summation convention). Significa sumar para todos los valores \(\alpha = 0, 1, 2, 3\). Lo mismo para \(\beta\) —como el subíndice \(\beta\) de \(\Gamma^\mu_{\alpha\beta}\) y el superíndice \(\beta\) de \(\frac{dx^\beta}{d\tau}\) forman un par, también se suma sobre \(\beta = 0, 1, 2, 3\). Es decir, es una suma de \(4 \times 4 = 16\) términos. Es una forma de escribir que omite el símbolo de suma \(\sum\), y la usaremos de aquí en adelante.
Un ejemplo sencillo: si escribes \(A^\alpha B_\alpha\), significa \(A^0 B_0 + A^1 B_1 + A^2 B_2 + A^3 B_3\). Puedes pensarlo como la versión en 4 dimensiones del producto escalar de vectores que aprendiste en el instituto \(\vec{A} \cdot \vec{B} = A_x B_x + A_y B_y + A_z B_z\). Lo resumo en una figura (Fig. 2.6「Imagen del convenio de suma de Einstein」).
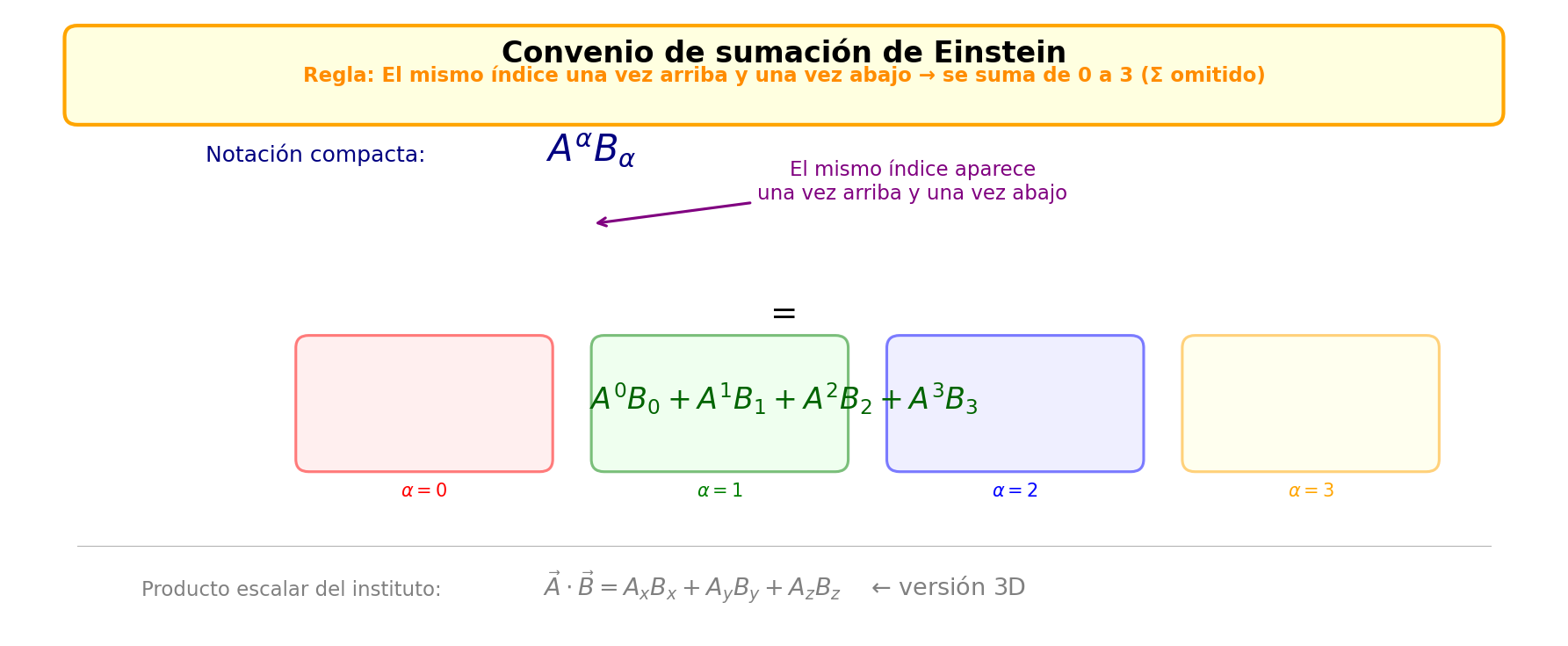
Fig. 2.6: Imagen del convenio de suma de Einstein. Cuando el mismo índice aparece una vez arriba y una vez abajo, se suma sobre ese índice desde \(0\) hasta \(3\). Es una notación que omite el símbolo \(\sum\), y se usa en todas las ecuaciones de relatividad. {: #fig-gr-ch2-summation-convention } 🟡 Lina: Y el lado derecho es cero —es decir, no hay fuerza. Compáralo con \(\vec{F} = m\vec{a}\) de Newton. La "fuerza" llamada gravedad ha desaparecido del lado derecho, y en su lugar el término \(\Gamma\) ha entrado en el lado izquierdo —del lado de la aceleración. ¿Ves claramente en las ecuaciones lo de "la gravedad no es una fuerza sino curvatura del espacio-tiempo" que dijimos antes?
⚪ Mei: Ya veo. En Newton, la gravedad entraba como "fuerza" en el lado derecho, pero en Einstein se absorbe en el \(\Gamma\) del lado izquierdo y el lado derecho queda en cero —la estructura ha cambiado por completo.
🔵 Kai: ¿Cuál es la diferencia entre línea de mundo y geodésica?
🟡 Lina: Línea de mundo es el nombre genérico para la trayectoria que cualquier objeto traza en un diagrama espacio-temporal. Ya reciba fuerzas aparte de la gravedad o no, la trayectoria de cualquier objeto es una línea de mundo. Geodésica es, de entre ellas, la línea de mundo de un objeto que no recibe fuerzas aparte de la gravedad —es decir, un caso especial de línea de mundo.
🔵 Kai: ¿"Aparte de la gravedad"? ¿La gravedad no es una fuerza?
🟡 Lina: Ahí está la diferencia decisiva entre Newton y Einstein (Fig. 2.7「Comparación de la visión de la gravedad de Newton y Einstein. Izquierda」).
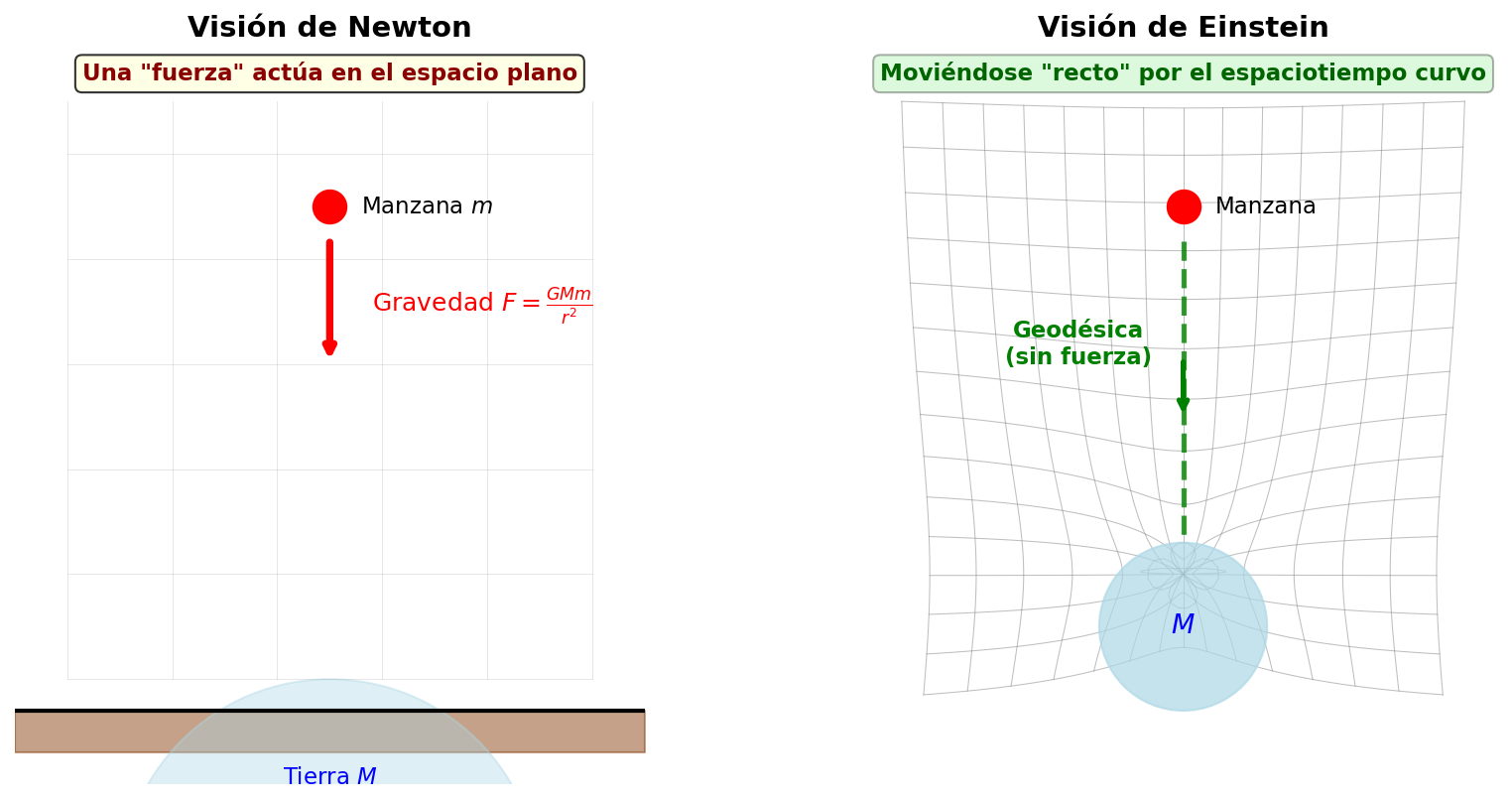
Fig. 2.7: Comparación de la visión de la gravedad de Newton y Einstein. Izquierda — Visión de Newton: en un espacio plano, la manzana cae atraída por la "fuerza" de la gravedad. Derecha — Visión de Einstein: la masa de la Tierra curva el espacio-tiempo, y la manzana simplemente avanza "recto" a lo largo de una geodésica en el espacio-tiempo curvado sin recibir fuerza.
- Visión de Newton: La manzana cae atraída por "la fuerza de la gravedad"
- Visión de Einstein: La manzana no recibe ninguna fuerza. Simplemente avanza recto (a lo largo de la geodésica) en el espacio-tiempo curvado
En el marco de Einstein, la gravedad no es una fuerza sino que se absorbe en la curvatura del espacio-tiempo. Por eso no es "solo actúa la gravedad" sino "no actúa ninguna fuerza aparte de la gravedad = no actúa ninguna fuerza" —ese es el significado de geodésica. Que solo la ecuación con lado derecho cero se llame "ecuación de geodésicas" también se debe a que, en terminología geométrica, geodésica significa "trayectoria extremal en un espacio curvado". Dibujo la distinción entre línea de mundo y geodésica en un diagrama espacio-temporal (Fig. 2.8「Diferencia entre línea de mundo y geodésica. Izquierda」).
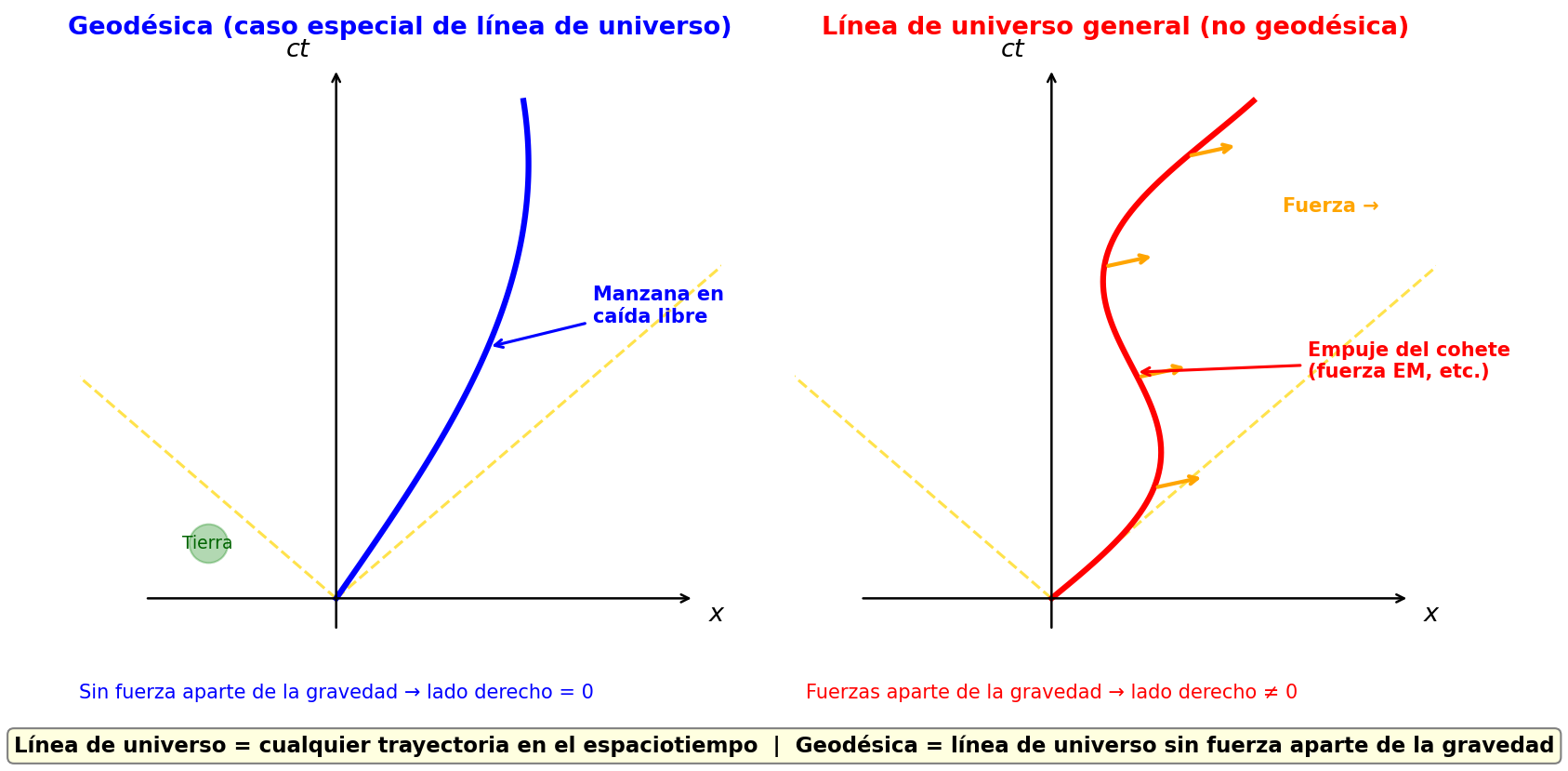
Fig. 2.8: Diferencia entre línea de mundo y geodésica. Izquierda — Geodésica: línea de mundo de un objeto que no recibe fuerzas aparte de la gravedad (manzana en caída libre). Lado derecho de la ecuación de movimiento = 0. Derecha — Línea de mundo general (no geodésica): trayectoria de un objeto que recibe fuerzas aparte de la gravedad, como la propulsión de un cohete. Lado derecho ≠ 0.
✅ Verificación de comprensión: ¿Cuál es la diferencia entre línea de mundo y geodésica?
Respuesta
Línea de mundo es el nombre genérico para la trayectoria que cualquier objeto traza en un diagrama espacio-temporal, ya reciba fuerzas o no. Geodésica es, de entre ellas, la línea de mundo de un objeto que no recibe fuerzas aparte de la gravedad —es decir, un caso especial de línea de mundo.
🔵 Kai: Entonces al revés, ¿una partícula cargada acelerada por fuerza electromagnética no está en una geodésica?
🟡 Lina: Exacto. La fuerza electromagnética, a diferencia de la gravedad, no se absorbe en la curvatura del espacio-tiempo, así que permanece como una fuerza.
🔵 Kai: En ese caso, ¿cómo queda la ecuación de movimiento?
🟡 Lina: Solo hay que añadir "fuerzas aparte de la gravedad" al lado derecho de la ecuación de geodésicas. Sin embargo, la ecuación de geodésicas tal cual tiene la forma "aceleración = 0" —si vamos a añadir una fuerza al lado derecho, queremos ponerla en la forma "masa × aceleración = fuerza". Así que multiplicamos el lado izquierdo por la masa \(m\) y escribimos la fuerza en el lado derecho. Por ejemplo, para una partícula de carga \(q\) moviéndose en un campo electromagnético, añadiendo la fuerza electromagnética (versión 4-dimensional de la fuerza de Lorentz):
Aquí \(\frac{dx^\nu}{d\tau}\) es la 4-velocidad de la partícula (la versión en 4 dimensiones de la velocidad que apareció antes). No necesitas seguir los detalles del lado derecho ahora —lo importante es solo la estructura. \(F^{\mu}{}_{\nu}\) es un tensor de rango 2, con un superíndice \(\mu\) y un subíndice \(\nu\). Que los índices se escriban separados es solo para clarificar el orden "el primero arriba, el segundo abajo", pero no te preocupes por eso ahora. Y \(\nu\) aparece una vez abajo en \(F^{\mu}{}_{\nu}\) y una vez arriba en \(\frac{dx^\nu}{d\tau}\), así que se contrae (se suma). En cambio, \(\mu\) aparece solo como superíndice tanto en el lado izquierdo como en el derecho —no forma un par "una vez arriba y una vez abajo", así que no se suma. Este tipo de índice se llama índice libre (free index).
🔵 Kai: Déjame organizar un momento. El índice de contracción \(\nu\) se suma y desaparece. El índice libre \(\mu\) permanece, y si eliges \(\mu = 0\) es la ecuación en dirección temporal, si \(\mu = 1\) es en dirección \(x\)... es decir, ¿esta línea en realidad representa 4 ecuaciones simultáneamente?
🟡 Lina: Exacto. 1 línea por 4 ecuaciones —ahí está la conveniencia de la notación de índices. Resumiendo, hay 2 tipos de índices:
- Índice de contracción (índice mudo): el mismo índice aparece una vez arriba y una vez abajo → se suma sobre ese índice de \(0\) a \(3\) (el índice desaparece)
- Índice libre: un índice que no forma par arriba-abajo dentro de cada término. Aparece en la misma posición (si arriba, arriba) en ambos lados de la igualdad, y no se suma. Significa "la igualdad se cumple para cualquier elección de \(\mu = 0, 1, 2, 3\)", escribiendo 4 ecuaciones en 1 línea
Por ejemplo, si eliges \(\mu = 1\) tienes la ecuación en dirección \(x\), si eliges \(\mu = 2\) la ecuación en dirección \(y\), y así sucesivamente. El \(F^{\mu}{}_{\nu}\) del lado derecho es el tensor del campo electromagnético —la extensión a 4 dimensiones de la fuerza de Lorentz \(\vec{F} = q(\vec{E} + \vec{v} \times \vec{B})\) que se aprende en el instituto. \(F^{\mu}{}_{\nu}\) es un tensor de rango 2, con un superíndice (contravariante) y un subíndice (covariante) —el significado de arriba/abajo de los índices se aprenderá formalmente en Cap. 6, así que no te preocupes ahora. Su contenido concreto se trata en Teoría Cuántica de Campos. Por cierto, \(\Gamma^\mu_{\alpha\beta}\) del lado izquierdo también tiene índices, pero en realidad no es un tensor —su regla de cambio bajo transformaciones de coordenadas difiere de la de los tensores. Esta distinción se aprende en Cap. 8, así que no te preocupes por ahora.
Nota sobre la notación (adelanto): El significado de arriba/abajo de los índices de \(F^{\mu}{}_{\nu}\) se introduce formalmente en Cap. 6, así que puedes saltarlo por ahora.
El lado izquierdo es "aceleración en espacio-tiempo curvado × masa" —la gravedad se absorbe en el término \(\Gamma\). El lado derecho es la fuerza electromagnética. Una ecuación con fuerza en el lado derecho no se llama "ecuación de geodésicas" sino simplemente "ecuación de movimiento". Si una fuerza curva la trayectoria, ya no es una geodésica.
🔵 Kai: Entiendo. Si no hay fuerza en el lado derecho, puedes dividir ambos lados entre \(m\) y recuperar la ecuación de geodésicas original... ah, un momento. ¿El hecho de que puedas dividir entre \(m\) significa que la ecuación de geodésicas no contiene la masa \(m\) —que todos los objetos siguen la misma trayectoria sin importar su masa? ¿Es lo mismo que el experimento que Galileo (según la leyenda) hizo en la Torre de Pisa?
🟡 Lina: Exactamente. El "los objetos pesados y ligeros caen igual" de Galileo, en el marco de Einstein, se incorpora naturalmente como "todos los objetos avanzan a lo largo de la misma geodésica independientemente de su masa". Esto es la expresión matemática de que la masa inercial y la masa gravitatoria son iguales (principio de equivalencia). Lo veremos en detalle en Cap. 5.
✅ Verificación de comprensión: ¿Con qué principio físico se relaciona el hecho de que la masa \(m\) de la partícula no aparezca en la ecuación de geodésicas?
Respuesta
Se relaciona con la igualdad entre masa inercial y masa gravitatoria (principio de equivalencia). Como la masa no aparece en la ecuación, todos los objetos avanzan a lo largo de la misma geodésica independientemente de su masa.
🔵 Kai: Por cierto, ¿quién decide cómo se curva el espacio-tiempo del lado izquierdo?
🟡 Lina: Eso lo decide la ecuación de Einstein —el objetivo de lo que viene.
El lado izquierdo \(G_{\mu\nu}\) (tensor de Einstein) es el grado de curvatura del espacio-tiempo, el lado derecho \(T_{\mu\nu}\) (tensor energía-momento) es la distribución de materia y energía. Es decir, la distribución de materia y energía determina el grado de curvatura del espacio-tiempo —esa es la respuesta a tu pregunta, Kai. Y como ambos lados son el mismo tipo de tensor (de rango 2), esta forma se mantiene en cualquier sistema de coordenadas.
🔵 Kai: La materia determina la forma del espacio-tiempo, y la forma del espacio-tiempo determina el movimiento de los objetos —se influencian mutuamente. ...Pero tengo varias dudas. Primero, ¿el \(G_{\mu\nu}\) del lado izquierdo y la \(G\) (constante de gravitación universal) del lado derecho están relacionados?
🟡 Lina: Son cosas completamente diferentes. \(G_{\mu\nu}\) es un tensor con índices (una cantidad que representa la curvatura del espacio-tiempo), \(G\) es simplemente una constante sin índices (la constante de gravitación universal de Newton \(\approx 6.67 \times 10^{-11}\)). Casualmente usan la misma letra del alfabeto, pero físicamente no tienen relación. Distínguelos por el contexto y la presencia o ausencia de índices.
🔵 Kai: Luego, ¿qué es el "\(8\pi\)" en \(\frac{8\pi G}{c^4}\)? ¿Por qué aparecen el \(8\) y el número \(\pi\)? Y también me intriga que se divida entre \(c^4\).
🟡 Lina: Ese coeficiente no es un número elegido libremente por Einstein, sino que se determina para ser consistente con la ecuación de Poisson de Newton \(\nabla^2 \Phi = 4\pi G\rho\). De la condición de que la ecuación de Einstein se reduce a la ecuación de Poisson en el límite de gravedad débil y velocidades lentas, debe ser \(8\pi G/c^4\). El origen del \(4\pi\) es, como vimos en Cap. 1, el ángulo sólido total \(4\pi\) estereorradianes que rodea una esfera. La razón de que sea \(8\pi\) (el doble de \(4\pi\)) viene de un factor incluido en la definición del tensor de Einstein \(G_{\mu\nu}\), pero en esta etapa no se puede derivar, así que lo verificaremos calculándolo en Cap. 14.
🔵 Kai: Se determina para coincidir en el límite newtoniano. ¿Y el \(c^4\)?
🟡 Lina: El \(c^4\) en el denominador es para ajustar las dimensiones. \(T_{\mu\nu}\) es una cantidad que representa "energía o momento por unidad de volumen" y tiene dimensiones de densidad de energía —es decir, J/m³ (julios por metro cúbico). Por otro lado, \(G_{\mu\nu}\) es una cantidad construida a partir de la segunda derivada del tensor métrico y tiene dimensiones de 1/m² (inverso del cuadrado de longitud). Intuitivamente, en el instituto al derivar \(y = f(x)\), si la unidad de \(x\) es metros y \(y\) es adimensional, la unidad de \(\frac{d^2 y}{dx^2}\) es \(1/\text{m}^2\). El tensor métrico \(g_{\mu\nu}\) es (como veremos en capítulos posteriores) una cantidad adimensional, y las coordenadas \(x^\mu\) tienen dimensiones de longitud. Así que al derivar \(g_{\mu\nu}\) dos veces respecto a las coordenadas se obtienen dimensiones de 1/m² —\(G_{\mu\nu}\) se construye a partir de ahí y tiene las mismas dimensiones (la verificación estricta se hace en Cap. 14). Si el lado izquierdo es 1/m² y el derecho es J/m³, las dimensiones no coinciden, así que es necesario interponer una constante para igualarlas —ese rol lo cumple \(G/c^4\). La verificación concreta de las dimensiones se hará en Cap. 14, así que por ahora solo recuerda que es "el único valor consistente con el límite newtoniano".
🔵 Kai: Y antes, en la ecuación de geodésicas también apareció \(\Gamma\), que es "curvatura del espacio-tiempo". ¿Cuál es la diferencia entre \(\Gamma\) y \(G_{\mu\nu}\)?
🟡 Lina: Buena pregunta. En términos de la relación causal física, el orden es el siguiente. Míralo junto con el diagrama de flujo (Fig. 2.9「Estructura básica de la relatividad general y relación entre las distintas cantidades」).
%%{init: {"theme": "default", "themeCSS": ".edgePath .path, .flowchart-link { stroke-width: 2px !important; }"}}%%
flowchart LR
T["Materia/Energía<br/>T_μν"] -->|"Ecuación de Einstein"| g["Tensor métrico<br/>g_μν"]
g -->|"1ª derivada"| Γ["Coeficientes de conexión<br/>Γ^μ_αβ"]
g -->|"2ª derivada"| R["Tensor de Riemann<br/>R^μ_ναβ"]
Γ -->|"Ecuación de geodésicas"| orbit["Órbita de la partícula"]
R -->|"Contracción"| Ric["Tensor de Ricci<br/>R_μν"]
Ric -->|"Otra contracción"| G["Tensor de Einstein<br/>G_μν"]Fig. 2.9: Estructura básica de la relatividad general y relación entre las distintas cantidades
Primero se da la distribución de materia y energía \(T_{\mu\nu}\). Por ejemplo, configuraciones como "hay una estrella esférica uniforme de radio \(R\) y masa \(M\)" o "un gas de densidad \(\rho\) se extiende uniformemente por todo el universo" se escriben matemáticamente en la forma de \(T_{\mu\nu}\). Es la misma idea que especificar la densidad de masa \(\rho\) en el lado derecho de la ecuación de Poisson de Newton.
Luego se resuelve la ecuación de Einstein \(G_{\mu\nu} = \frac{8\pi G}{c^4}T_{\mu\nu}\) y se determina el tensor métrico \(g_{\mu\nu}\) —es decir, se determina la forma del espacio-tiempo. La flecha que va de \(T_{\mu\nu}\) a \(g_{\mu\nu}\) en el diagrama de flujo significa esto.
🔵 Kai: Un momento. El lado izquierdo de la ecuación es \(G_{\mu\nu}\), ¿por qué se obtiene \(g_{\mu\nu}\)?
🟡 Lina: \(G_{\mu\nu}\) (tensor de Einstein) es una cantidad construida a partir de \(g_{\mu\nu}\) y sus derivadas. Así que la ecuación de Einstein es, en esencia, una ecuación diferencial para \(g_{\mu\nu}\). Tiene la misma estructura que la ecuación de Poisson de Newton \(\nabla^2 \Phi = 4\pi G\rho\), que es una ecuación diferencial para \(\Phi\).
Una vez determinado \(g_{\mu\nu}\), se deriva para obtener los coeficientes de conexión \(\Gamma^\mu_{\alpha\beta}\). Finalmente, con la ecuación de geodésicas se determina la órbita de la partícula.
Aquí, tanto \(G_{\mu\nu}\) como \(\Gamma\) se construyen a partir de \(g_{\mu\nu}\), pero difieren en el número de derivadas:
- 1ª derivada de \(g_{\mu\nu}\) → \(\Gamma^\mu_{\alpha\beta}\) (coeficientes de conexión) → determina la órbita de la partícula mediante la ecuación de geodésicas
- 2ª derivada de \(g_{\mu\nu}\) → tensor de Riemann \(R^\mu{}_{\nu\alpha\beta}\) (cantidad que describe completamente la curvatura del espacio-tiempo, tensor de rango 4 con 4 índices) → contracción → tensor de Ricci \(R_{\mu\nu}\) (tensor de rango 2) → otra contracción → escalar de Ricci \(R\) (tensor de rango 0) → combinando \(R_{\mu\nu}\) y \(R\) se forma \(G_{\mu\nu}\) (tensor de Einstein) → la ecuación de Einstein determina la relación con la materia
🔵 Kai: En el diagrama de flujo hay una flecha directa de \(g\) a \(R\), pero también hay una flecha que pasa por \(\Gamma\). ¿Qué camino se toma en el cálculo real?
🟡 Lina: El cálculo real siempre sigue el orden \(g \to \Gamma \to R\) —primero se deriva \(g\) una vez para obtener \(\Gamma\), luego se vuelve a derivar \(\Gamma\) y se combina con productos de \(\Gamma\) para obtener \(R\). La flecha de \(g\) a \(R\) solo indica la relación de dependencia "en última instancia, \(R\) se determina por la segunda derivada de \(g\)", no que se pueda saltar \(\Gamma\). Si te confunde, basta con recordar el camino único \(g \to \Gamma \to R\). ...Bien, en el diagrama de flujo apareció la palabra "contracción".
🔵 Kai: Sí, ¿qué es la "contracción"?
🟡 Lina: Recuerda el convenio de suma de Einstein que aprendimos antes. \(A^\alpha B_\alpha = A^0 B_0 + A^1 B_1 + A^2 B_2 + A^3 B_3\) —al sumar sobre el índice \(\alpha\) emparejado arriba y abajo, \(\alpha\) desaparece y queda un escalar (sin índices).
🔵 Kai: Sí, es como el producto escalar de dos vectores.
🟡 Lina: Sí. Aquello era un ejemplo de emparejar índices entre dos vectores (tensores de rango 1), pero la misma idea se puede aplicar dentro de un solo tensor —la operación de emparejar un par de índices (uno arriba, uno abajo) de un tensor y sumar se llama contracción. Por ejemplo, para un tensor de rango 2 \(M^\mu{}_\nu\) (\(M\) es cualquier cosa —lo escribo como ejemplo general de tensor de rango 2), al emparejar \(\mu\) y \(\nu\) y sumar: \(M^0{}_0 + M^1{}_1 + M^2{}_2 + M^3{}_3\) —todos los índices desaparecen y queda un escalar.
🔵 Kai: Ah, ¿es como tomar solo los elementos de la diagonal en la tabla de \(4 \times 4\) y sumarlos?
🟡 Lina: Exacto. Viéndolo como tabla de \(4 \times 4\), corresponde a la operación de tomar solo los elementos de la diagonal de arriba-izquierda a abajo-derecha y sumarlos. Escribiéndolo concretamente, cuando \(M^\mu{}_\nu\) se presenta como tabla:
| \(\nu=0\) | \(\nu=1\) | \(\nu=2\) | \(\nu=3\) | |
|---|---|---|---|---|
| \(\mu=0\) | \(M^0{}_0\) | \(M^0{}_1\) | \(M^0{}_2\) | \(M^0{}_3\) |
| \(\mu=1\) | \(M^1{}_0\) | \(M^1{}_1\) | \(M^1{}_2\) | \(M^1{}_3\) |
| \(\mu=2\) | \(M^2{}_0\) | \(M^2{}_1\) | \(M^2{}_2\) | \(M^2{}_3\) |
| \(\mu=3\) | \(M^3{}_0\) | \(M^3{}_1\) | \(M^3{}_2\) | \(M^3{}_3\) |
Se suman solo las componentes diagonales en negrita: \(M^0{}_0 + M^1{}_1 + M^2{}_2 + M^3{}_3\) (para quienes conocen las matrices, es lo mismo que la "traza"). Sin embargo, esto es el caso de emparejar los índices superior e inferior dentro de un solo tensor de rango 2 —el ejemplo más simple de contracción. Más generalmente, como en \(A^\alpha B_\alpha\) de antes, también se pueden emparejar índices entre dos tensores y sumar, pero la idea básica es la misma —"sumar sobre los índices emparejados arriba y abajo, eliminando esos índices". Una contracción elimina un par de índices (2 índices), así que el rango baja en 2.
⚪ Mei: Cada vez que se contrae, el rango baja en 2 —es una operación de comprimir y resumir información.
🔵 Kai: Entiendo que la contracción baja el rango. Pero de aquí en adelante, con todos esos nombres apareciendo de golpe —tensor de Riemann, tensor de Ricci—, me voy a confundir... ¿Tengo que memorizar todo ahora?
🟡 Lina: Por ahora basta con captar los nombres y "el flujo de cómo el rango va bajando". El contenido concreto lo aprenderemos uno a uno en capítulos posteriores. Solo en cuanto al flujo: al contraer una vez el tensor de Riemann (4 índices, rango 4), desaparecen 2 índices y queda el tensor de Ricci (2 índices, rango 2). Al contraer una vez más el tensor de Ricci, queda el escalar de Ricci (sin índices, rango 0). El tensor de Einstein \(G_{\mu\nu}\) es una cantidad que se construye combinando el tensor de Ricci y el escalar de Ricci —en el diagrama de flujo se simplifica como "otra contracción", pero en rigor no es solo contracción sino que también hay una operación de combinación. Lo derivaremos en Cap. 14. En forma de figura, el flujo es así (Fig. 2.10「Descenso de rango por contracción de tensores」).
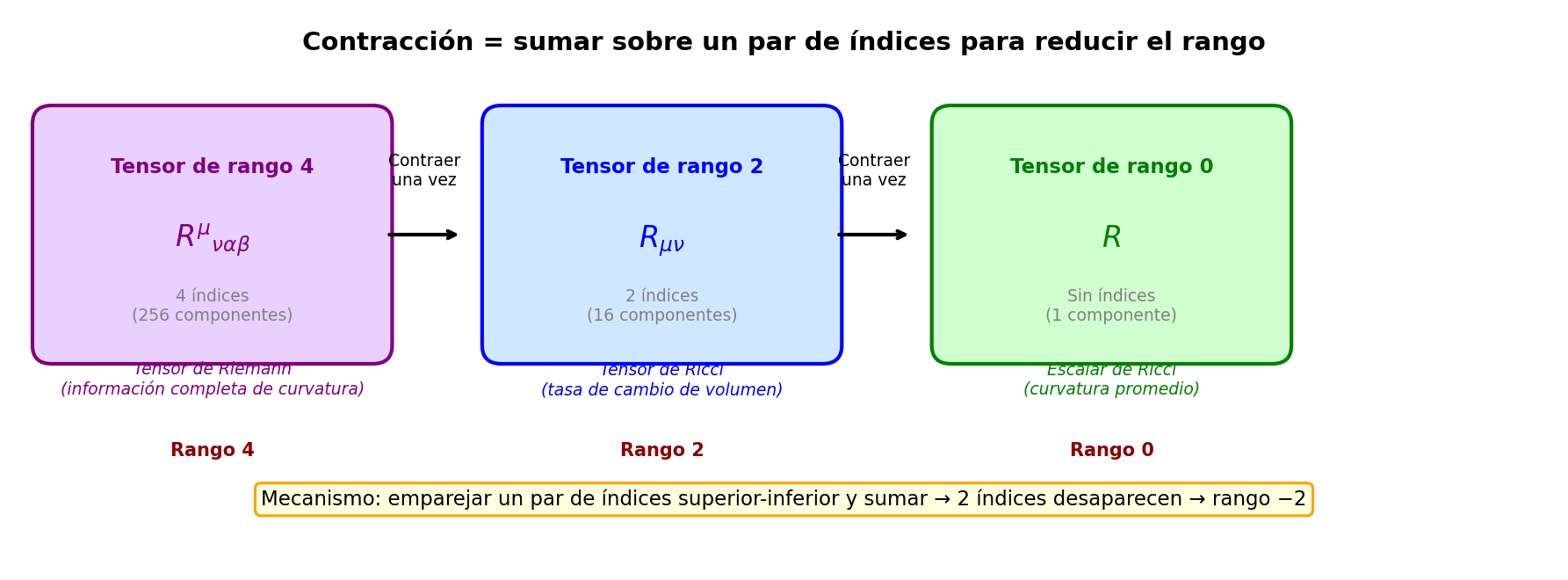
Fig. 2.10: Descenso de rango por contracción de tensores. Al contraer una vez el tensor de Riemann de rango 4 (256 componentes) se obtiene el tensor de Ricci de rango 2 (16 componentes), y al contraer una vez más se obtiene el escalar de Ricci de rango 0 (1 componente). En cada contracción desaparecen 2 índices y la información se comprime.
Los cálculos detallados se harán en capítulos posteriores, así que por ahora piénsalo solo como "una operación de compresión de información".
Es decir, \(G_{\mu\nu}\) es una cantidad construida a partir de las derivadas y productos de \(\Gamma\).
🔵 Kai: Con solo la ruta superior (\(\Gamma\) → órbita) ya se puede obtener el movimiento de la partícula. ¿Para qué sirve la ruta inferior (Riemann → \(G_{\mu\nu}\))?
🟡 Lina: Tiene dos usos. El primero es obtener \(g_{\mu\nu}\) en sí. Mira el extremo izquierdo del diagrama de flujo —la ecuación de Einstein es lo que determina \(g_{\mu\nu}\) a partir de la distribución de materia \(T_{\mu\nu}\), y su lado izquierdo es \(G_{\mu\nu}\), ¿verdad? Es decir, la ruta inferior es la herramienta para "determinar la forma del espacio-tiempo a partir de cómo se distribuye la materia". El segundo uso es diagnosticar "cuánto está curvado" un espacio-tiempo dado. Por ejemplo, cuando las componentes de la métrica toman valores extraños en algún lugar cerca de un agujero negro, para determinar "si realmente el espacio-tiempo se ha roto, o si solo es una mala elección de coordenadas", necesitas examinar invariantes construidos a partir del tensor de Riemann. Esto lo haremos en detalle en Cap. 16. Si solo quieres obtener la órbita de la partícula, la ruta superior es suficiente.
⚪ Mei: Es decir, la ruta superior determina "cómo se mueve la partícula dentro del espacio-tiempo", y la ruta inferior es para "determinar la forma del espacio-tiempo mismo" y "examinar el grado de curvatura" —pero ambas parten del mismo tensor métrico \(g_{\mu\nu}\).
🔵 Kai: Viéndolo en el diagrama de flujo, todo empieza desde \(g_{\mu\nu}\). El tensor métrico es realmente el protagonista. ...Pero si la materia \(T_{\mu\nu}\) curva el espacio-tiempo, y el espacio-tiempo curvado determina el movimiento de la materia, entonces se influencian mutuamente y ¿no se forma un círculo vicioso? ¿Cómo se resuelve?
✅ Verificación de comprensión: ¿Qué significa físicamente que el lado derecho de la ecuación de geodésicas sea cero?
Respuesta
Significa que no actúa (ninguna fuerza aparte de la gravedad) sobre la partícula. La gravedad no es una fuerza sino que se absorbe en el término \(\Gamma\) del lado izquierdo como curvatura del espacio-tiempo, por lo que no aparece en el lado derecho.
✅ Verificación de comprensión: En la ecuación de Einstein \(G_{\mu\nu} = \frac{8\pi G}{c^4}T_{\mu\nu}\), ¿qué representan el lado izquierdo y el derecho respectivamente?
Respuesta
El lado izquierdo \(G_{\mu\nu}\) (tensor de Einstein) representa el grado de curvatura del espacio-tiempo, el lado derecho \(T_{\mu\nu}\) (tensor energía-momento) representa la distribución de materia y energía. La relación es que "la distribución de materia determina la curvatura del espacio-tiempo".
📝 Ejercicios:
- Correspondencia entre los dos pilares de Newton y Einstein → Problema B-3. Los dos pilares de correspondencia entre Newton y Einstein, Comprensión de la ecuación de geodésicas → Problema M-1. Comprensión de la ecuación geodésica, Coeficiente de la ecuación de Einstein → Problema M-2. Coeficiente de la ecuación de Einstein, Cantidades derivadas del tensor métrico → Problema A-1. Cantidades derivadas del tensor métrico
🟡 Lina: Comparemos lado a lado el marco de Newton y el de Einstein.
Tabla 2.3: Correspondencia entre la mecánica newtoniana y la relatividad general
| Newton | Einstein (relatividad general) | |
|---|---|---|
| Movimiento de la partícula | \(\vec{F} = m\vec{a}\) (ecuación de movimiento) | \(\frac{d^2 x^\mu}{d\tau^2} + \Gamma^\mu_{\alpha\beta}\frac{dx^\alpha}{d\tau}\frac{dx^\beta}{d\tau} = 0\) (ecuación de geodésicas. Si hay fuerzas aparte de la gravedad, se añaden al lado derecho) |
| Ecuación de campo | \(\nabla^2 \Phi = 4\pi G\rho\) (ecuación de Poisson) | \(G_{\mu\nu} = \frac{8\pi G}{c^4}T_{\mu\nu}\) (ecuación de Einstein) |
| Naturaleza de la gravedad | Fuerza \(F = -GMm/r^2\) | Curvatura del espacio-tiempo |
| Protagonista | Potencial gravitatorio \(\Phi\) (escalar) | Tensor métrico \(g_{\mu\nu}\) (tensor de rango 2) |
⚪ Mei: Hay una correspondencia uno a uno perfecta. Del escalar al tensor de rango 2, de la densidad al tensor energía-momento —solo sube el rango pero la estructura es la misma, lo que lo hace muy comprensible.
🟡 Lina: Newton también tenía una "ecuación de campo" —la ecuación de Poisson que determina el potencial gravitatorio \(\Phi\).
La ecuación de Einstein
es su generalización, donde el escalar \(\Phi\) se reemplaza por el tensor de rango 2 \(g_{\mu\nu}\), y la densidad \(\rho\) se reemplaza por el tensor energía-momento \(T_{\mu\nu}\). De hecho, en el límite de gravedad débil y velocidades lentas, de la ecuación de Einstein se deriva la ecuación de Poisson.
🔵 Kai: La teoría de Newton es una aproximación de la teoría de Einstein.
🟡 Lina: Así es. Por eso, en el marco de Einstein, no basta con tensores de rango 1 (vectores), sino que se necesitan tensores hasta rango 2.
✅ Verificación de comprensión: Al pasar de la teoría gravitatoria de Newton a la relatividad general de Einstein, ¿en qué se transforma la magnitud física protagonista, el escalar \(\Phi\)? ¿Y cuál es el rango de ese tensor?
Respuesta
Pasa del potencial gravitatorio \(\Phi\) (tensor de rango 0 = escalar) al tensor métrico \(g_{\mu\nu}\) (tensor de rango 2). De manera similar, el lado derecho de la ecuación de campo también se extiende de la densidad \(\rho\) (escalar) al tensor energía-momento \(T_{\mu\nu}\) (tensor de rango 2).
2.4 La travesía que sigue — Empezando desde el tensor de rango 0¶
🔵 Kai: La ecuación de Einstein determina la forma del espacio-tiempo, y dentro de él las partículas avanzan a lo largo de geodésicas —es un marco grandioso. Pero todavía no sé nada del contenido del tensor métrico \(g_{\mu\nu}\) ni del tensor de Riemann. ¿Por dónde empiezo?
🟡 Lina: Buena pregunta. Confirmemos en una figura el camino que sube gradualmente el rango de los tensores desde 0 (Fig. 2.11「Hoja de ruta de la travesía que sigue」).
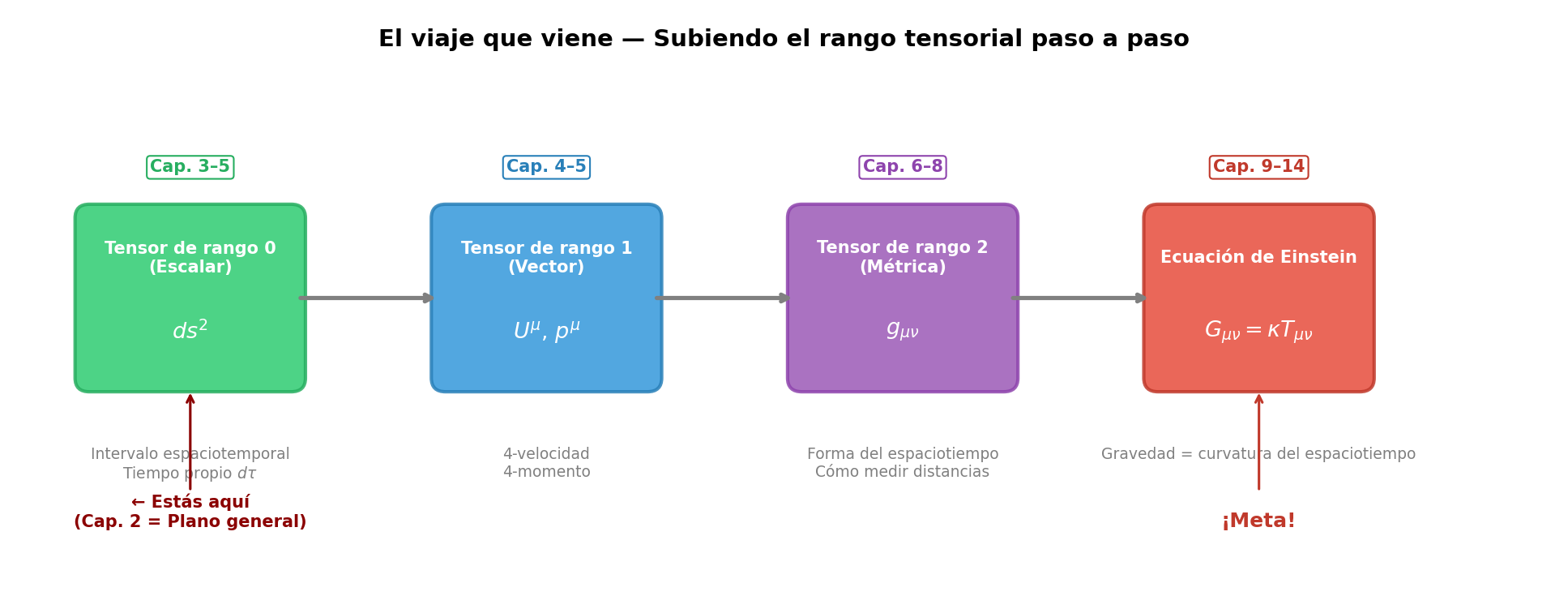
Fig. 2.11: Hoja de ruta de la travesía que sigue. Tensor de rango 0 (intervalo espacio-temporal \(ds^2\)) → Tensor de rango 1 (4-vectores) → Tensor de rango 2 (métrica \(g_{\mu\nu}\)) → ecuación de Einstein, construyendo paso a paso subiendo el rango de los tensores.
🟡 Lina: Así que la primera pieza de esta travesía comienza con lo más sencillo de los tensores: un tensor de rango 0 (escalar) —es decir, un invariante. Como vimos en 2.1「Escalares, vectores y tensores」, el ejemplo representativo de invariante en el espacio tridimensional era la distancia entre dos puntos. Al extender esto al espacio-tiempo de 4 dimensiones, ¿qué forma toma el invariante? Mostrando solo la conclusión por adelantado:
Que este \(ds^2\) es "un invariante que tiene el mismo valor sin importar desde qué sistema inercial se calcule" —es decir, que es un tensor de rango 0— se demostrará a partir del principio de invariancia de la velocidad de la luz en el siguiente Cap. 3. Por ahora solo observa la forma.
🔵 Kai: La parte espacial \(dx^2 + dy^2 + dz^2\) parece el teorema de Pitágoras, pero el término temporal \(-(cdt)^2\) tiene un signo menos y es extraño.
🟡 Lina: Aquí \((cdt)^2 = (c \times dt)^2 = c^2 \cdot dt^2\) (el cuadrado de "\(c\) por \(dt\)" en su totalidad), y \(dx^2\) significa \((dx)^2\) (el cuadrado de \(dx\)) —no es \(d(x^2)\), ten cuidado. \(dy^2\), \(dz^2\), \((cdt)^2\) se leen de la misma manera. Por cierto, aquí \(x, y, z\) son las coordenadas espaciales en sí (posición en dirección \(x\), posición en dirección \(y\), posición en dirección \(z\)), y no los "números como superíndice" de las etiquetas de componentes \(x^1, x^2, x^3\) que aparecieron antes —es confuso, pero en la ecuación de \(ds^2\) se escribe así por tradición. \(dt\), \(dx\), \(dy\), \(dz\) son cambios infinitesimales del tiempo y del espacio respectivamente. En el instituto escribías el cuadrado de la distancia entre dos puntos usando \(\Delta x\), \(\Delta y\), \(\Delta z\) con el teorema de Pitágoras como \(\Delta x^2 + \Delta y^2 + \Delta z^2\). \(\Delta x\) era "el cambio en \(x\)". El límite de \(\Delta x\) haciéndose infinitamente pequeño se escribe \(dx\) —es el mismo símbolo que el \(dx\) cuando escribías \(\frac{dy}{dx}\) en el instituto, y significa "un cambio infinitamente pequeño". \(dy\), \(dz\), \(dt\) son análogos. \(ds^2\) representa "el cuadrado del intervalo entre dos puntos del espacio-tiempo extremadamente cercanos". Es la extensión a la dirección temporal de lo que en el espacio tridimensional era el cuadrado de la distancia entre dos puntos \(dx^2 + dy^2 + dz^2\) (versión infinitesimal del teorema de Pitágoras). El \(c\) que multiplica a \(dt\) es por la misma razón que vimos en el diagrama espacio-temporal —para igualar la dimensión del tiempo a la de longitud (\(c \times dt\) es "la distancia que la luz recorre durante \(dt\)").
🔵 Kai: Los términos espaciales son todos positivos, pero el término temporal tiene un signo negativo. ¿Por qué solo el tiempo tiene signo negativo? Y además, ¿\(ds^2\) puede ser negativo? ¿No es raro que "el cuadrado de una distancia" sea negativo?
🟡 Lina: Buenas preguntas. \(ds^2\) no es "el cuadrado de una distancia" en el sentido ordinario —es el "intervalo del espacio-tiempo" que combina tiempo y espacio, así que puede ser positivo, negativo o cero. La respuesta completa de por qué es necesario el signo negativo se derivará en el siguiente Cap. 3 a partir del principio de invariancia de la velocidad de la luz, pero dando solo la intuición de antemano: la luz recorre una distancia \(c \times dt\) durante un tiempo \(dt\), así que \(dx = c\,dt\) y entonces \(-(cdt)^2 + dx^2 = 0\).
⚪ Mei: El hecho de que \(ds^2 = 0\) para la luz se debe a que el término negativo y el positivo se cancelan exactamente.
🟡 Lina: Así es. Una partícula más lenta que la luz solo puede recorrer una distancia menor que la de la luz en el mismo tiempo coordenado \(dt\). Es decir, el cuadrado de la distancia recorrida por la partícula \(dx^2+dy^2+dz^2\) es menor que el cuadrado de la distancia recorrida por la luz \((cdt)^2\) —\(dx^2+dy^2+dz^2 < (cdt)^2\) (sin importar en qué dirección se mueva, la suma en las 3 direcciones no puede superar la distancia de la luz). Sustituyendo en la fórmula: \(ds^2 = -(cdt)^2 + (dx^2+dy^2+dz^2)\), como \((cdt)^2 > dx^2+dy^2+dz^2\), el término negativo domina y en total \(ds^2 < 0\).
🔵 Kai: Entiendo, para la luz \(ds^2 = 0\) y para algo más lento que la luz \(ds^2 < 0\). Pero la razón fundamental de por qué hay que poner el signo negativo al tiempo se entenderá en el siguiente capítulo. Aun así, que \(ds^2\) sea negativo —"un cuadrado que es negativo"— se siente muy incómodo...
🟡 Lina: Esa incomodidad es un sentimiento correcto. En realidad, el símbolo \(ds^2\) no es "el cuadrado de algo" —es mejor pensar que \(ds^2\) en su totalidad es el nombre de una sola cantidad. El cuadrado de la distancia ordinaria siempre es positivo, pero el "intervalo" del espacio-tiempo es una cantidad que mezcla tiempo y espacio, así que puede ser positivo, negativo o cero —por eso no se llama "distancia" sino "intervalo".
Nota sobre la convención de signos: Dependiendo del libro de texto, se puede usar la convención \(ds^2 = +(cdt)^2 - dx^2 - dy^2 - dz^2\), con signo positivo para el tiempo y negativo para el espacio. En este libro adoptamos \(ds^2 = -(cdt)^2 + dx^2 + dy^2 + dz^2\) (negativo para el tiempo, positivo para el espacio). Ambas convenciones dan las mismas conclusiones físicas, pero el significado del signo de \(ds^2\) se invierte, así que hay que tener cuidado al consultar otros libros de texto.
⚪ Mei: Es decir, con el signo de \(ds^2\) se puede saber "si es más rápido o más lento que la luz".
🟡 Lina: Exacto. Por cierto, adelantando un poco la relación con el tensor métrico \(g_{\mu\nu}\) que apareció antes: los coeficientes de cada término de esta ecuación (dirección temporal \(-1\), direcciones espaciales \(+1, +1, +1\)) corresponden precisamente a las componentes de \(g_{\mu\nu}\) —lo introduciremos formalmente en Cap. 6. Dibujo en una figura la diferencia entre distancia espacial e intervalo espacio-temporal (Fig. 2.12「Comparación entre geometría euclídea y geometría de Minkowski. Izquierda」).
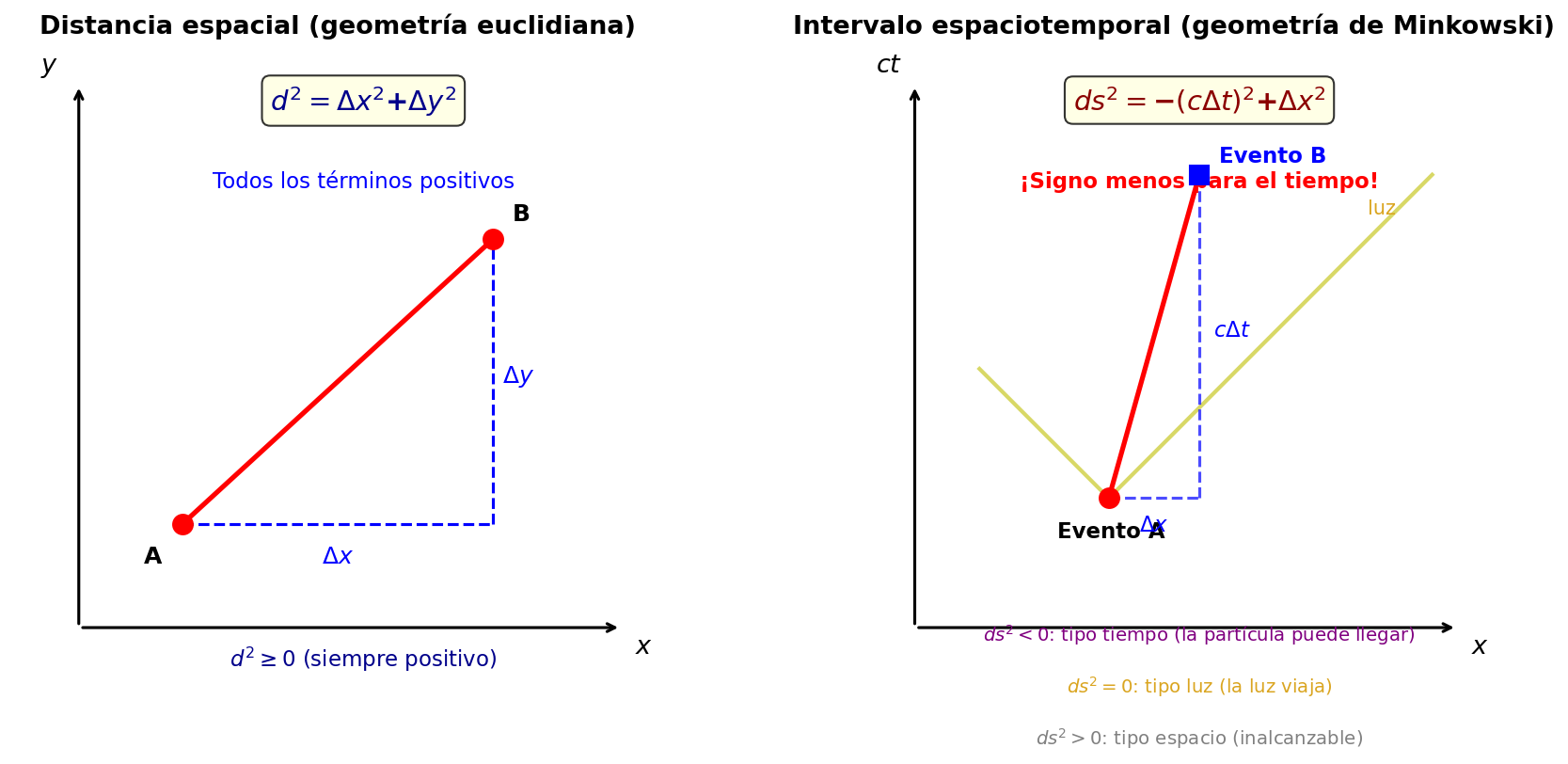
Fig. 2.12: Comparación entre geometría euclídea y geometría de Minkowski. Izquierda — En el espacio ordinario, el cuadrado de la distancia es \(\Delta x^2 + \Delta y^2\) y siempre es positivo. Derecha — El intervalo espacio-temporal es \(ds^2 = -(c\Delta t)^2 + \Delta x^2\), con signo negativo en el término temporal, por lo que puede ser positivo, negativo o cero. \(ds^2 < 0\) (tipo tiempo) significa que una partícula con masa puede alcanzarlo, \(ds^2 = 0\) (tipo luz) es la trayectoria por donde pasa la luz, \(ds^2 > 0\) (tipo espacio) significa una relación inalcanzable.
🟡 Lina: Como muestra la figura, \(ds^2 < 0\) corresponde a una relación alcanzable por partículas con masa (tipo tiempo), \(ds^2 = 0\) a una trayectoria por donde pasa la luz (tipo luz), y \(ds^2 > 0\) a una relación inalcanzable ni siquiera para la luz (tipo espacio). Por qué es necesario el signo negativo, qué significa físicamente cada caso —derivar todo esto paso a paso desde el principio de invariancia de la velocidad de la luz es el núcleo del siguiente Cap. 3. Por ahora solo recuerda que "\(ds^2\) negativo tiene significado físico —de hecho, para partículas con masa, \(ds^2 < 0\) es lo normal".
⚪ Mei: Con el signo de \(ds^2\) se puede saber "si una partícula con masa puede alcanzarlo, si solo la luz puede pasar, o si ninguno puede alcanzarlo". Estoy deseando que el siguiente capítulo parta de este tensor de rango 0.
🟡 Lina: Como aparecieron muchos símbolos en este capítulo, hago un resumen al final.
Tabla 2.4: Lista de los principales símbolos que aparecieron en este capítulo
| Símbolo | Lectura | Significado | Capítulo donde se aprende en detalle |
|---|---|---|---|
| \(\mu, \nu, \alpha, \beta\) | Mu, nu, alfa, beta | Índices del espacio-tiempo (0, 1, 2, 3) | Cap. 4 |
| \(\tau\) | Tau | Tiempo propio (tiempo que marca el reloj de la partícula) | Cap. 3 |
| \(ds^2\) | De-ese-cuadrado | Intervalo espacio-temporal (tensor de rango 0) | Cap. 3 |
| \(g_{\mu\nu}\) | ge-mu-nu | Tensor métrico (tensor de rango 2 que determina la forma del espacio-tiempo) | Cap. 6 |
| \(\Gamma^\mu_{\alpha\beta}\) | Gamma | Coeficientes de conexión (se determinan a partir de la 1ª derivada de la métrica) | Cap. 8 |
| \(R^\mu{}_{\nu\alpha\beta}\) | Tensor de Riemann | Tensor de Riemann (información completa de la curvatura del espacio-tiempo) | Cap. 9 |
| \(R_{\mu\nu}\) | Tensor de Ricci | Tensor de Ricci (contracción del de Riemann) | Cap. 10 |
| \(G_{\mu\nu}\) | Tensor de Einstein | Tensor de Einstein (lado izquierdo de la ecuación de Einstein) | Cap. 14 |
| \(T_{\mu\nu}\) | Te-mu-nu | Tensor energía-momento (distribución de materia) | Cap. 14 |
Avance del siguiente capítulo¶
Cap. 3「Capítulo 3 Relatividad especial — Transformación de Lorentz y consecuencias físicas」 construirá concretamente la primera pieza de este plano de diseño. Partiendo de los dos postulados de Einstein —el principio de relatividad y la invariancia de la velocidad de la luz—, se derivará el tensor de rango 0 (invariante) más fundamental —el intervalo espacio-temporal \(ds^2\)—, y a partir de ahí se construirán de una vez la transformación de Lorentz, la dilatación temporal y la métrica de Minkowski.
Bibliografía¶
- Schutz, B. F. A First Course in General Relativity, 3rd ed., Chapter 1. Cambridge University Press, 2022.
- Lancaster, T. and Blundell, S. J. General Relativity for the Gifted Amateur, Chapter 1. Oxford University Press, 2014.
- Carroll, S. M. Spacetime and Geometry: An Introduction to General Relativity, Chapter 1. Addison-Wesley, 2004.
Feedback on this page
Let us know if something was unclear, incorrect, or could be improved.