Capítulo 1 Éxitos y limitaciones de la gravedad de Newton¶
Resumen de lo anterior:
En el prólogo, vimos que todos los modelos de la física son hipótesis, y contemplamos la relatividad general como un modelo que abarca fenómenos tan diversos como el GPS, los agujeros negros, las ondas gravitacionales y la cosmología. A partir de ahora, vamos a seguir este largo viaje paso a paso con ecuaciones.
Objetivo de este capítulo
- Formular el modelo gravitatorio de Newton como una «teoría de campo» (ley de gravitación universal → potencial gravitatorio → ecuación de Poisson), confirmar su éxito asombroso (el descubrimiento de Neptuno), y luego clarificar dos limitaciones: la precesión del perihelio de Mercurio y la propagación instantánea de la gravedad
- Además, comprender el criterio para determinar «cuándo el modelo de Newton resulta insuficiente» usando la cantidad adimensional \(GM/(Rc^2)\)
- Finalmente, introducir otra formulación de la mecánica de Newton —el principio de mínima acción— y rederivir \(F = ma\) a partir de la ecuación de Euler-Lagrange
- Este marco será el «lenguaje común» que usaremos a lo largo de toda la relatividad general
1.1 La ley de gravitación universal — confirmación del punto de partida¶
🟡 Lina: En el prólogo, vimos la ecuación de la gravitación universal de Newton y las 4 propiedades de la gravedad (universalidad, imposibilidad de apantallarla, fuerza de largo alcance, extremadamente débil). Hoy tomaremos esa ecuación como punto de partida y la reescribiremos en el lenguaje de la «teoría de campo». Primero confirmemos la ecuación.
\(G \approx 6.67 \times 10^{-11}\ \mathrm{N \cdot m^2 / kg^2}\) es la constante de gravitación universal. Como vimos en el prólogo, si tomamos la razón entre la fuerza gravitatoria y la electromagnética para dos protones, obtenemos un valor enormemente pequeño \(\sim 10^{-36}\). Aun así, la gravedad domina el universo porque no se puede apantallar, siempre es atractiva y tiene alcance infinito.
🔵 Kai: Es lo que escuchamos en el capítulo anterior. ¿Hoy avanzamos a partir de aquí?
🟡 Lina: Así es. Cuando reescribimos esta ecuación como «teoría de campo», las limitaciones del modelo de Newton se hacen claramente visibles a nivel de las ecuaciones.
✅ Verificación de comprensión: ¿Cuál es el orden de magnitud del valor de la constante de gravitación universal \(G\) en unidades SI?
Respuesta
\(G \approx 6.67 \times 10^{-11}\ \mathrm{N \cdot m^2/kg^2}\) (del orden de \(10^{-11}\)).
📝 Ejercicios:
- Cálculo de la aceleración gravitatoria en la superficie terrestre → Problema B-1. Cálculo de la aceleración gravitatoria en la superficie terrestre
1.2 Campo gravitatorio y potencial gravitatorio — reescribiendo la gravedad de Newton como «teoría de campo»¶
🟡 Lina: La gravitación universal de Newton estaba escrita en forma de acción a distancia, donde «dos objetos se atraen directamente». Vamos a reescribirla en forma de acción local mediada por un «campo». Avanzaremos en 3 pasos.
Paso 1: De la acción a distancia a la acción local — introducción del campo gravitatorio¶
🟡 Lina: La ecuación (1.1) es una forma de escribir «dos objetos ejercen fuerza uno sobre el otro directamente a través de la distancia» — acción a distancia (action at a distance). Pero para resolver el problema de que la fuerza se transmita instantáneamente, necesitamos un mecanismo por el cual la fuerza se propague a través del espacio. Para eso introducimos el concepto de campo (field).
🔵 Kai: ¿Qué es un «campo»?
🟡 Lina: Es el estado en el que a cada punto del espacio se le asigna alguna cantidad física. Piensa en un mapa de distribución de temperaturas del pronóstico del tiempo. A cada punto del mapa se le asigna un valor numérico de temperatura, ¿verdad? Eso es un «campo de temperatura». De la misma manera, si a cada punto del espacio se le asigna un vector que representa la intensidad de la gravedad, eso es un «campo gravitatorio».
🟡 Lina: A partir de aquí aparecerán vectores en las ecuaciones, así que voy a establecer una convención de notación. En el instituto probablemente representabas vectores con flechas \(\vec{r}\), pero en la física universitaria lo estándar es usar negrita \(\mathbf{r}\). En ecuaciones con muchos subíndices, las flechas dificultan la lectura, así que la convención en publicaciones es usar negrita.
🔵 Kai: ¿\(\mathbf{r}\) y \(r\) son diferentes?
🟡 Lina: \(\mathbf{r}\) es el vector posición (tiene dirección y magnitud), \(r = |\mathbf{r}|\) es su magnitud (escalar, solo un número). Se distinguen por si están en negrita o no, así que presta atención.
Entonces, cuando hay una masa \(M\) en el origen, la fuerza que actúa sobre una masa \(m\) en la posición \(\mathbf{r}\) es
Aquí \(\hat{\mathbf{r}}\) (se lee «\(\mathbf{r}\) gorro») es el vector unitario (unit vector) que apunta desde el origen en la dirección de \(\mathbf{r}\) — un vector de magnitud 1. El símbolo gorro \(\hat{}\) es la convención para denotar «vector unitario», y lo usaremos de aquí en adelante. El signo menos indica que la fuerza es opuesta a \(\hat{\mathbf{r}}\) (apunta hacia el centro = fuerza atractiva). En el instituto quizás solo trabajaste con la magnitud de la fuerza \(F = GMm/r^2\), pero en la física universitaria la formulación vectorial es lo básico. La escritura «vector unitario × cantidad escalar» aparecerá continuamente de aquí en adelante, así que acostúmbrate. Si llamamos \(\mathbf{g}\) a lo que hay dentro del paréntesis:
🔵 Kai: En la ecuación (1.4), \(m\) no aparece dentro de \(\mathbf{g}\)... ¿eso significa que el campo existe antes de colocar la masa de prueba?
🟡 Lina: Exactamente. Mira la ecuación (1.4). Como pudimos factorizar \(m\) en la ecuación (1.2), \(m\) no queda en la definición de \(\mathbf{g}\) — es decir, \(\mathbf{g}\) es una cantidad que existe en cada punto del espacio antes de colocar la masa de prueba \(m\). Es el «campo» creado por la masa \(M\) en el espacio, y el campo existe como una propiedad del espacio independientemente de la presencia de objetos. Si miras Fig. 1.1「Campo vectorial del campo gravitatorio creado por una masa central」, verás que todas las flechas apuntan hacia el centro y son más largas cuanto más cerca del centro (la fuerza es más intensa).
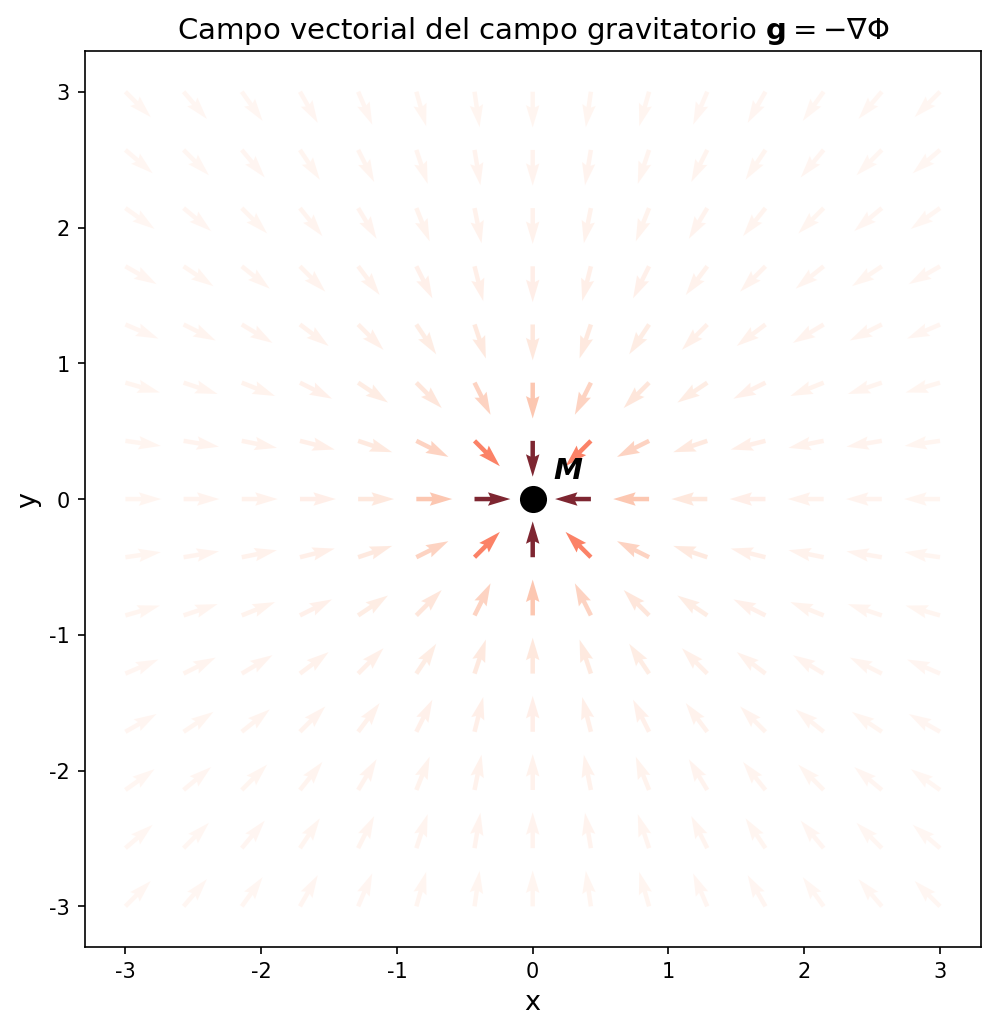
Fig. 1.1: Campo vectorial del campo gravitatorio creado por una masa central. Campo vectorial \(\mathbf{g}\) creado por la masa central \(M\). Todas las flechas apuntan hacia el centro, y cuanto menor es la distancia, mayor es la fuerza (color más intenso).
🟡 Lina: Si pongo en palabras el cambio de perspectiva que ocurre aquí, es «atribuir la causa de la fuerza al espacio». Esta es la esencia del «modo de pensar en campos» — la acción local (local action). Separamos la transmisión de la fuerza en dos etapas. Etapa 1: La masa \(M\) crea un campo gravitatorio \(\mathbf{g}\) en el espacio circundante. Etapa 2: El campo gravitatorio \(\mathbf{g}\) ejerce fuerza sobre la masa \(m\) que se encuentra en ese lugar. La fuerza se transmite «a través del espacio».
⚪ Mei: Es decir, como el campo es una propiedad del espacio y no de los objetos, la perspectiva cambia de «dos objetos se atraen directamente» a «el espacio media la fuerza».
🔵 Kai: Pero aunque digamos que el campo «transmite la fuerza», ¿la transmisión lleva tiempo? ¿O llega instantáneamente?
🟡 Lina: Buena pregunta. En realidad ese es el problema fundamental del modelo de Newton — lo veremos en detalle en la segunda mitad. Primero organicemos la comparación entre acción a distancia y acción local. En la acción a distancia, dos masas ejercen fuerza directamente una sobre la otra sin ningún intermediario. En la acción local, la masa \(M\) primero crea un campo gravitatorio \(\mathbf{g}\) en el espacio, y ese campo transmite la fuerza a la masa \(m\) — es un proceso de dos etapas. Mira Fig. 1.2「Comparación entre acción a distancia y acción local」.
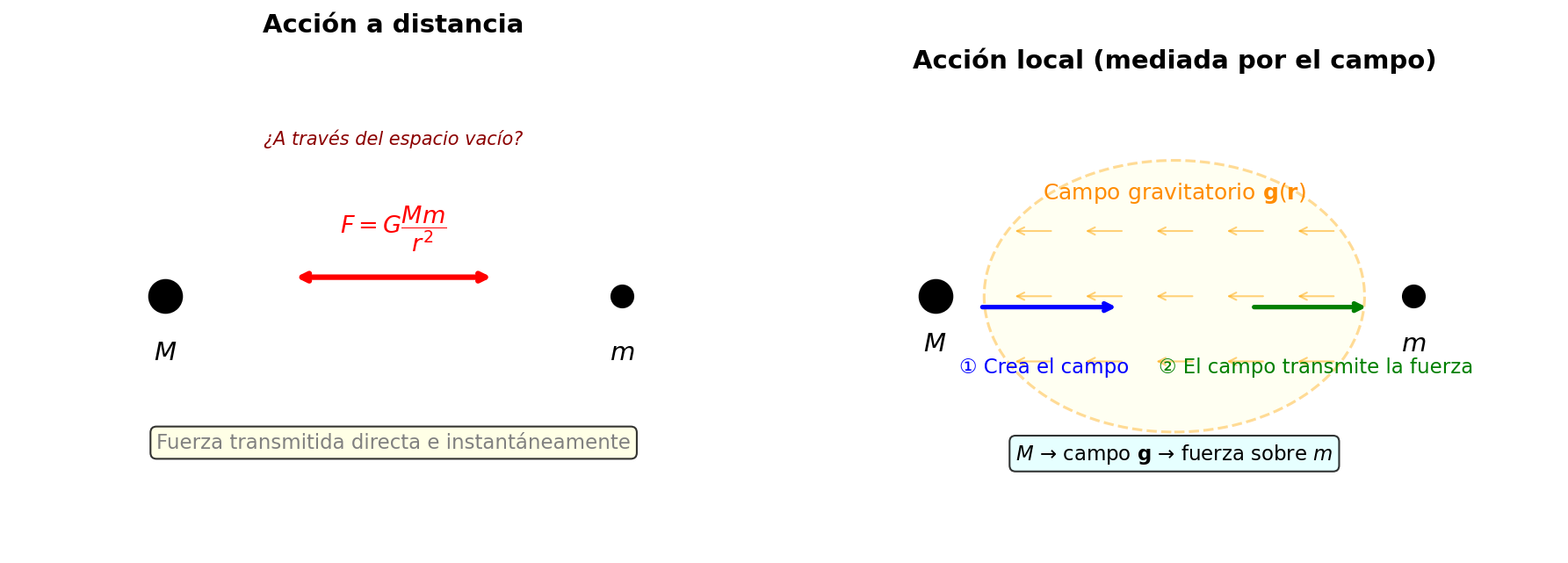
Fig. 1.2: Comparación entre acción a distancia y acción local. Izquierda: En la acción a distancia, dos masas ejercen fuerza directamente una sobre la otra sin intermediario. Derecha: En la acción local, la masa \(M\) primero crea un campo gravitatorio \(\mathbf{g}\) en el espacio (①), y ese campo transmite la fuerza a la masa \(m\) (②).
✅ Verificación de comprensión: Escribe la ecuación que define el campo gravitatorio \(\mathbf{g}(\mathbf{r})\). ¿Qué significa que esta cantidad no dependa de la masa \(m\)?
Respuesta
\(\mathbf{g}(\mathbf{r}) = -GM\hat{\mathbf{r}}/r^2\). Esta cantidad no depende de la masa de prueba \(m\) y es el «campo» que la masa \(M\) crea en el espacio. \(\mathbf{g}\) existe en cada punto del espacio antes de colocar la masa \(m\).
Paso 2: De vector a escalar — introducción del potencial gravitatorio¶
🔵 Kai: Pero un campo vectorial tiene 3 componentes en cada punto, ¿verdad? Gestionarlo en todo el espacio parece complicado...
🟡 Lina: Buena observación. Por eso introducimos el potencial gravitatorio (gravitational potential) \(\Phi(\mathbf{r})\), que es un campo escalar. A cada punto \(\mathbf{r}\) del espacio se le asigna un único valor numérico \(\Phi(\mathbf{r})\), así que es más fácil de manejar que un campo vectorial. Lo que queremos hacer es «encontrar una función escalar \(\Phi\) tal que al tomar su gradiente con signo menos obtengamos el campo gravitatorio \(\mathbf{g}\)» — es decir, buscar \(\Phi\) tal que \(\mathbf{g} = -\nabla\Phi\).
🔵 Kai: ¿Qué es \(\nabla\)?
🟡 Lina: \(\nabla\) (nabla) es un símbolo que representa la operación de «tomar el gradiente», y la definición formal la explicaré en la segunda parte de esta sección, así que por ahora piensa simplemente en «la operación que calcula la pendiente de \(\Phi\)». No te asustes cuando veas el símbolo \(\nabla\Phi\) — en el caso de simetría esférica todo se calcula solo con la derivada de instituto \(d\Phi/dr\), así que puedes seguir todos los cálculos de aquí sin conocer la definición formal de \(\nabla\). La convención de poner el signo menos es para expresar naturalmente que «los objetos son atraídos hacia donde el potencial es más bajo» (imagina una bola rodando cuesta abajo). Vamos a obtener \(\Phi\) calculando hacia atrás a partir del \(\mathbf{g}\) que ya conocemos. Cuando hay una masa \(M\) en el origen, por la simetría esférica — es decir, la propiedad de que «se ve igual desde cualquier dirección» — \(\Phi\) es función solo de \(r\). Como solo hay una masa \(M\) solitaria en el origen, la situación es la misma mirando hacia el norte o hacia el este — no hay distinción entre las direcciones \(x, y, z\). Si no hay distinción, el valor de \(\Phi\) no puede cambiar según la dirección, y debe determinarse solo por la distancia al centro \(r\). Ahora, sin esperar a la definición formal de \(\nabla\), obtendremos \(\Phi\) solo con la intuición. Si \(\Phi\) es función solo de \(r\), entonces \(\Phi\) solo varía en la dirección \(r\). Por tanto, «la pendiente espacial de \(\Phi\)» apunta solo en la dirección \(r\) (dirección \(\hat{\mathbf{r}}\)), y su magnitud se puede calcular con la derivada ordinaria que aprendiste en el instituto \(d\Phi/dr\). Es decir, en este caso especial, «la pendiente de \(\Phi\)» = «un vector en la dirección \(r\) con magnitud \((d\Phi/dr)\)». La definición general de \(\nabla\) la daré después, pero ahora basta con la derivada de una variable. De la ecuación (1.3), la componente radial del campo gravitatorio — la componente en la dirección \(\hat{\mathbf{r}}\) — es \(g_r = -GM/r^2\) (negativa porque apunta hacia el centro). Por otro lado, escribiendo \(\mathbf{g} = -\nabla\Phi\) solo en la dirección radial obtenemos \(g_r = -d\Phi/dr\). Igualando ambas: \(-d\Phi/dr = -GM/r^2\), es decir \(d\Phi/dr = GM/r^2\). Solo hay que integrar respecto a \(r\).
⚪ Mei: Es decir, el problema de encontrar \(\Phi\) desconocido se ha reducido a un cálculo de integración que aprendimos en el instituto.
🟡 Lina: Así es. En matemáticas III del instituto aprendiste que \(\int x^n\,dx = x^{n+1}/(n+1)\) (\(n \neq -1\)). La misma fórmula se aplica aunque la variable sea \(r\). Ahora \(1/r^2 = r^{-2}\), así que sustituyendo \(n = -2\) obtenemos \(\int r^{-2}\,dr = \frac{r^{-2+1}}{-2+1} = \frac{r^{-1}}{-1} = -\frac{1}{r}\). Usando esto:
Aquí \(GM\) es una constante que no depende de \(r\), así que se puede sacar de la integral (igual que en el instituto \(\int af(x)\,dx = a\int f(x)\,dx\)). \(C\) es la constante de integración — como la integral indefinida tiene una «indeterminación constante», necesitamos determinarla con una condición física. Imponiendo la condición de frontera de que \(\Phi \to 0\) en el infinito — el convenio de «tomar el punto infinitamente lejano como referencia (cero)» — como \(-GM/r \to 0\) cuando \(r \to \infty\), se determina \(C = 0\) y obtenemos:
🔵 Kai: ¡Oh, tiene la forma \(-1/r\)! Cero en el infinito y se hace más negativo a medida que nos acercamos al centro.
🟡 Lina: Si miras Fig. 1.3「Superficie 3D del potencial gravitatorio」, verás que tiene forma de «pozo» que se hace más profundo al acercarse al centro.
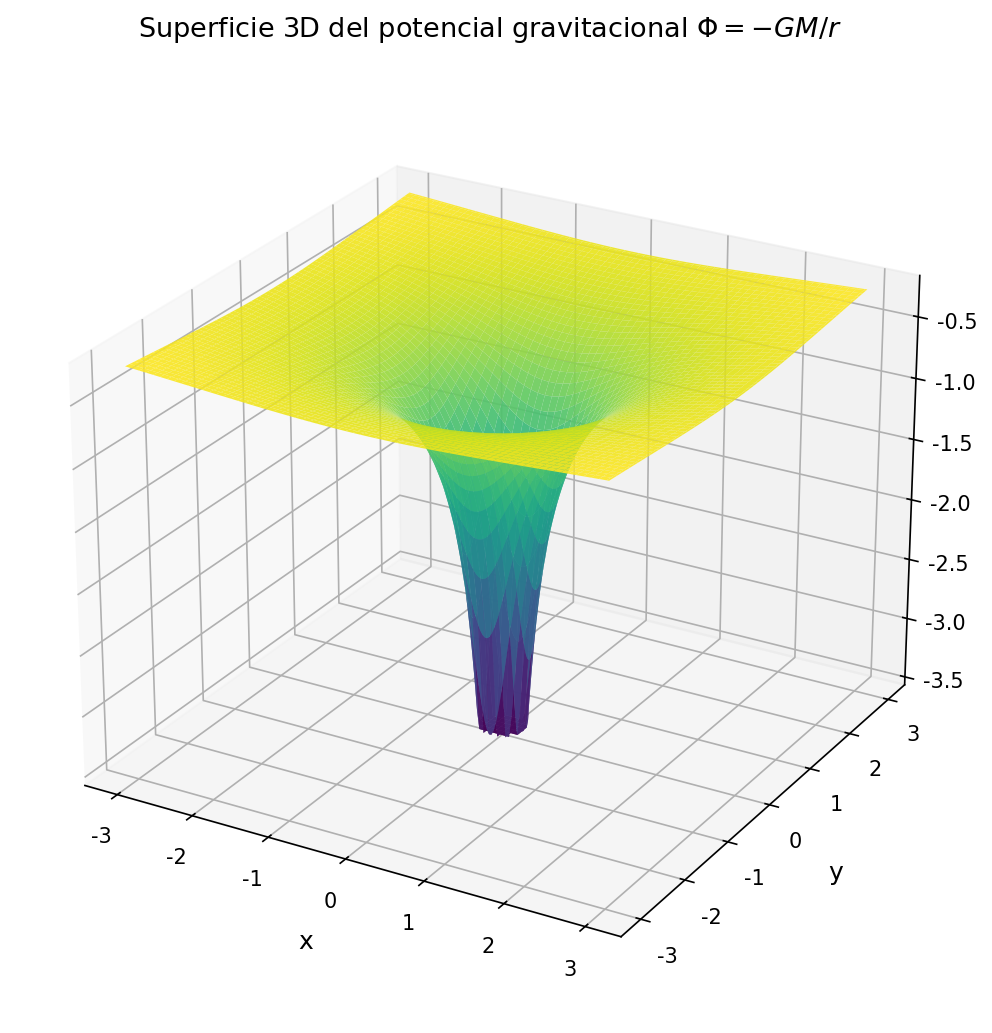
Fig. 1.3: Superficie 3D del potencial gravitatorio. Superficie 3D del potencial gravitatorio \(\Phi = -GM/r\). Tiene forma de «pozo» que se hace más profundo al acercarse a la masa central.
🟡 Lina: Ahora definamos formalmente la operación para extraer \(\mathbf{g}\) a partir de \(\Phi\). Antes calculamos \(\Phi\) hacia atrás a partir de \(\mathbf{g}\), pero el flujo original es «dado \(\Phi\), calcular su pendiente para obtener \(\mathbf{g}\)». Matemáticamente se trata de la operación del gradiente (gradient), que se escribe con el símbolo \(\nabla\) (nabla). En coordenadas cartesianas \((x, y, z)\):
Es decir, se juntan en un solo vector la pendiente en la dirección \(x\), la pendiente en la dirección \(y\) y la pendiente en la dirección \(z\). Aquí \(\partial\) (se lee «parcial»; en la física japonesa también se llama «round») es el símbolo de la derivada parcial. \(\partial\Phi/\partial x\) representa «cuánto cambia \(\Phi\) si cambias un poco solo \(x\) manteniendo \(y\) y \(z\) fijos». Por ejemplo, si \(\Phi = x^2 + 3y\), entonces \(\partial\Phi/\partial x = 2x\) (tratando \(y\) como constante), \(\partial\Phi/\partial y = 3\) (tratando \(x\) como constante), \(\partial\Phi/\partial z = 0\) (porque \(\Phi\) no contiene \(z\)). Es el mismo cálculo que la derivada del instituto, solo que «derivas respecto a una variable tratando las demás como constantes». Es decir, \(\nabla\Phi\) es un vector que nos indica la dirección en la que \(\Phi\) crece más rápidamente y la magnitud de esa pendiente.
⚪ Mei: Es decir, \(\nabla\Phi\) resume en un solo vector «la dirección de máximo crecimiento de \(\Phi\) y la magnitud de la pendiente» — como una «flecha que indica la dirección de la pendiente más pronunciada» en un mapa topográfico con curvas de nivel.
🟡 Lina: Así es. El campo gravitatorio es el gradiente del potencial con signo menos:
Como dije antes, el signo menos aparece porque los objetos son atraídos hacia donde el potencial es más bajo — el gradiente \(\nabla\Phi\) apunta en la dirección «ascendente», pero la gravedad tira en la dirección «descendente», así que se necesita el signo menos.
🔵 Kai: Entonces \(\Phi\) es como una «altura gravitatoria», y su pendiente genera la fuerza.
🟡 Lina: Si miras Fig. 1.4「Curvas de nivel y gradiente del potencial gravitatorio」, verás que las flechas son perpendiculares a las curvas de nivel (líneas que conectan puntos con el mismo valor de \(\Phi\)) y apuntan en la dirección donde el potencial disminuye.
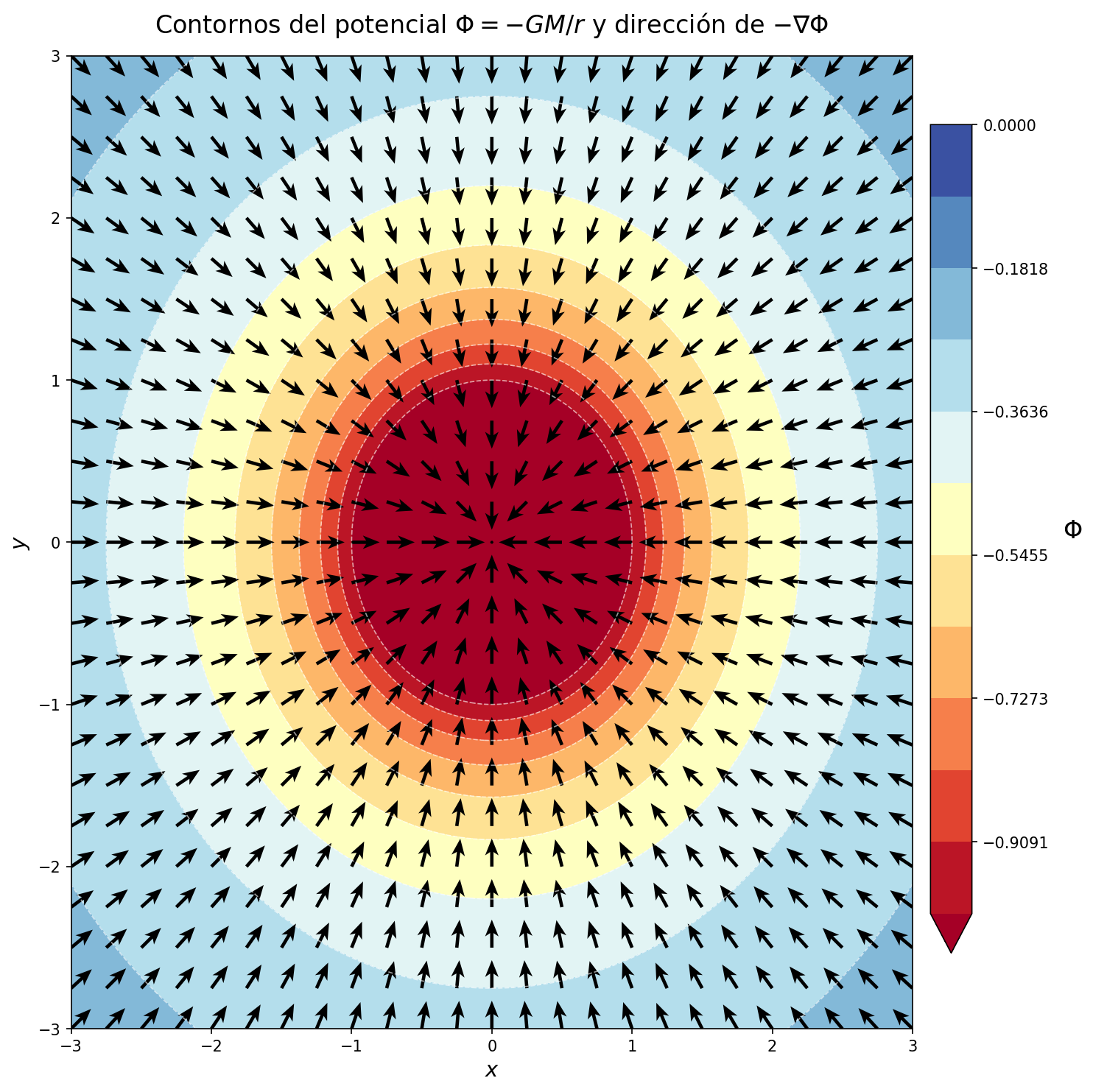
Fig. 1.4: Curvas de nivel y gradiente del potencial gravitatorio. Mapa de curvas de nivel (color) del mismo potencial \(\Phi = -GM/r\) visto desde arriba y dirección del campo gravitatorio \(\mathbf{g} = -\nabla\Phi\) (flechas). Las flechas apuntan en la dirección donde el potencial disminuye, es decir, en la dirección de atracción hacia la masa.
✅ Verificación de comprensión: Explica la diferencia entre «acción a distancia» y «acción local» usando el concepto de campo gravitatorio.
Respuesta
Acción a distancia: dos objetos ejercen fuerza directamente uno sobre el otro a través de la distancia. Acción local: la masa \(M\) primero crea un campo gravitatorio \(\mathbf{g}\) en el espacio circundante, y ese campo ejerce fuerza sobre la masa \(m\). La fuerza se transmite «a través del espacio».
✅ Verificación de comprensión: En el potencial gravitatorio \(\Phi = -GM/r\), cuando \(r \to \infty\) se tiene \(\Phi \to 0\). ¿Qué significa esto?
Respuesta
Se ha elegido el infinito como punto de referencia (potencial cero). A medida que nos acercamos a la masa \(M\), el potencial se hace más negativo (más profundo), lo que representa que estamos ligados gravitatoriamente.
📝 Ejercicios:
- Gradiente del potencial gravitatorio → Problema B-2. Derivada de la componente \(x\) del potencial gravitatorio, Problema B-3. Representación vectorial del campo gravitatorio, principio de superposición → Problema B-4. Superposición debida a dos masas puntuales, práctica de derivadas parciales → Problema B-8. Cálculos básicos de derivadas parciales, Problema B-9. Vector gradiente y curvas isotermas, gradiente de un potencial bidimensional → Problema B-3. Gradiente de un potencial bidimensional
Paso 3: De la masa puntual a la distribución — la ecuación de Poisson¶
🟡 Lina: Hasta aquí hemos visto que «si conocemos el potencial \(\Phi\), el campo gravitatorio se determina mediante \(\mathbf{g} = -\nabla\Phi\)». La siguiente pregunta es: ¿cómo se determina \(\Phi\)? La ecuación (1.5) era el resultado para el caso especial de «una masa puntual \(M\) en el origen». Pero las estrellas reales tienen tamaño, y la masa está distribuida en el espacio. Por eso introducimos la «densidad de masa» \(\rho(\mathbf{r})\) (rho) — la masa por unidad de volumen.
🔵 Kai: ¿Se puede encontrar el potencial incluso cuando la masa está dispersa por todas partes?
🟡 Lina: Sí. Aquí voy a plantear una pregunta. ¿No habrá una manera de saber «cuánta masa hay contenida en cierta región» usando solo la información del potencial o del campo gravitatorio?
🔵 Kai: Si el campo gravitatorio es fuerte, parece que habría mucha masa dentro... pero ¿cómo hacerlo cuantitativamente?
🟡 Lina: Buena intuición. De hecho, a partir de la ley del inverso del cuadrado de la gravitación universal, se puede derivar la siguiente propiedad. Primero daré una explicación intuitiva y luego la pondré en ecuaciones. Desde aquí hasta llegar a la ecuación de Poisson el camino es un poco largo, así que primero muestro la hoja de ruta. (1) Primero entender «flujo» y «ley de Gauss» → (2) Luego traducir las propiedades de la superficie a propiedades en cada punto con «divergencia» y «teorema de la divergencia» → (3) Finalmente obtener la ecuación de Poisson. Empecemos con (1). Considera una superficie cerrada arbitraria que rodea a la masa \(M\) — por ejemplo, una superficie como un globo que envuelve completamente la masa. En cada punto de esa superficie, mide la intensidad con la que el campo gravitatorio «atraviesa» la superficie y suma sobre toda la superficie. A esto lo llamamos flujo (flux). Usando la analogía del flujo de agua, cuando recibes el agua que sale de una manguera con una red, la cantidad total de agua que pasa a través de la red corresponde al flujo. En el caso del campo gravitatorio es «la suma de la intensidad del campo gravitatorio que atraviesa la superficie».
🔵 Kai: Si cambias la forma de la superficie, el flujo también debería cambiar...
🟡 Lina: Sin embargo, gracias a la ley del inverso del cuadrado, no cambia. Piénsalo así. Volviendo al ejemplo del agua, cuando el agua sale uniformemente de una manguera, «la cantidad de agua que pasa por la red» se calcula como «velocidad del flujo × área de la red» — cuanto mayor la velocidad y más grande la red, más agua pasa. El flujo del campo gravitatorio usa la misma idea: se calcula como «intensidad del campo × área». En el caso de una superficie esférica, la magnitud del campo gravitatorio es uniforme en todos los puntos de la esfera e igual a \(GM/r^2\), y el área de la esfera es \(4\pi r^2\). Además, en la superficie esférica el campo gravitatorio es perpendicular a la superficie, así que «intensidad del campo × área» es directamente el flujo, y los \(r^2\) se cancelan dando \(4\pi GM\) — independiente del radio de la superficie (el signo lo consideraremos después).
⚪ Mei: La intensidad del campo disminuye como \(1/r^2\), pero el área crece como \(r^2\), así que se cancelan exactamente y el resultado no depende del radio — una propiedad exclusiva de la ley del inverso del cuadrado.
🟡 Lina: Exacto. Aunque deformes la superficie de una esfera a otra forma, el total no cambia. ¿Por qué? Primero explico el concepto de ángulo sólido. En 2 dimensiones el «ángulo» representa la abertura entre dos líneas, pero en 3 dimensiones necesitamos una cantidad que represente «la extensión direccional». Eso es el ángulo sólido. Por ejemplo, cuando extiendes el brazo y levantas el pulgar, la «extensión direccional» que ocupa la uña del pulgar en tu campo visual es la imagen del ángulo sólido — si un gran cartel lejano y una pequeña tarjeta cercana se ven del mismo tamaño, ambos subtienden el mismo ángulo sólido. Es la cantidad que expresa cuántas direcciones cubre cierta parte de una superficie vista desde el centro. La unidad se llama estereorradián (sr), y la dirección completa (toda la esfera) suma \(4\pi\) sr — como el área de una esfera de radio \(r\) es \(4\pi r^2\), el ángulo sólido total es \(4\pi r^2 / r^2 = 4\pi\) sr.
Ahora, ¿qué ocurre cuando deformamos la superficie cerrada? Si cierta parte de la superficie se acerca al centro, allí el campo se hace más fuerte (crece como \(1/r^2\)). Pero al mismo tiempo, la extensión direccional (ángulo sólido) que esa parte cubre vista desde el centro se hace más estrecha. El tamaño del ángulo sólido se determina por «área ÷ \(r^2\)». Es la misma idea de que en 2 dimensiones el ángulo es «longitud de arco ÷ radio» (definición de radián) — en 3 dimensiones se convierte en «área ÷ radio al cuadrado». Un trozo de superficie con área \(A\) a distancia \(r\) del centro, orientado de frente al centro (la normal de la superficie apunta al centro), subtiende un ángulo sólido \(\Delta\Omega = A/r^2\). La misma área subtiende menos si está lejos y más si está cerca. Cuando la superficie está inclinada — cuando la normal se desvía de la dirección hacia el centro — el «área aparente vista desde el centro» disminuye (imagina la diferencia entre un cartel visto de frente y uno visto de lado). El ángulo sólido \(\Delta\Omega\) se define como «área aparente (componente de frente) ÷ \(r^2\)», así que si la superficie está inclinada, su contribución al ángulo sólido es menor para la misma área real. Cuando la superficie se acerca al centro y \(r\) disminuye, el área necesaria para cubrir el mismo ángulo sólido disminuye proporcionalmente a \(r^2\). Inversamente, las partes que se alejan tienen campo más débil pero cubren mayor extensión direccional. El flujo era «componente perpendicular a la superficie de la intensidad del campo × área», ¿verdad? Para un trozo pequeño de superficie, la intensidad del campo es \(GM/r^2\), al extraer la componente perpendicular a la superficie se incorpora el efecto de la inclinación, y combinando con el área obtenemos \(GM \times (\text{área aparente})/r^2 = GM\,\Delta\Omega\), donde \(r\) desaparece — es decir, la contribución de cada trozo al flujo depende solo del ángulo sólido \(\Delta\Omega\) que subtiende, y no de la distancia \(r\). Para toda la superficie cerrada se cubren todas las direcciones \(4\pi\), así que el total es \(4\pi GM\) (incluyendo el signo: \(-4\pi GM\)). No depende de la forma de la superficie. Mira Fig. 1.5「Ley de Gauss: flujo a través de una superficie cerrada」.
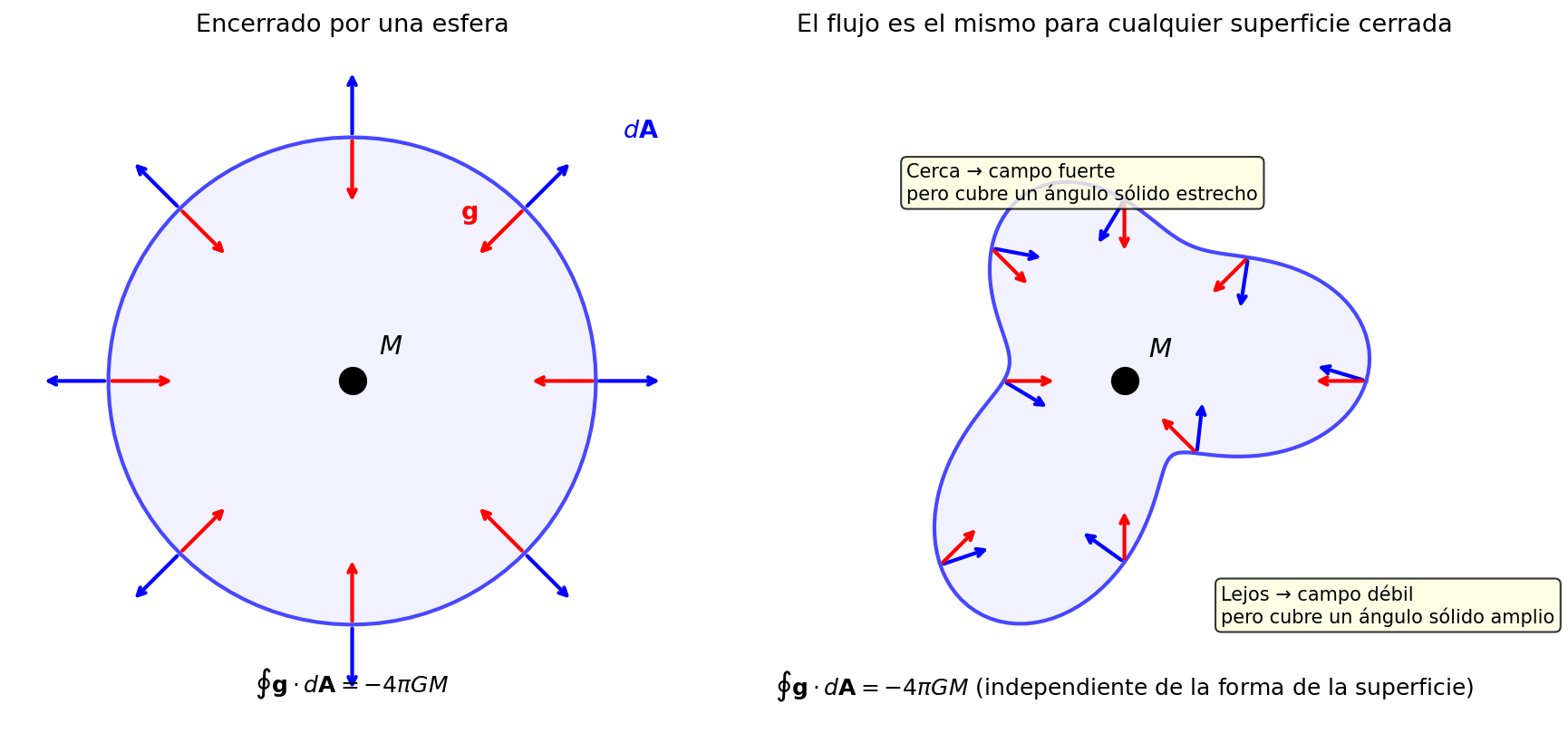
Fig. 1.5: Ley de Gauss: flujo a través de una superficie cerrada. Izquierda: caso de una superficie esférica. Las flechas rojas son el campo gravitatorio \(\mathbf{g}\) (hacia dentro), las flechas azules son el elemento de área \(d\mathbf{A}\) (hacia fuera). Derecha: incluso con una superficie cerrada deformada, donde la superficie está cerca el campo es fuerte pero la extensión direccional (ángulo sólido) es estrecha, y donde está lejos el campo es débil pero la extensión es amplia, por lo que el flujo total es el mismo \(-4\pi GM\).
🟡 Lina: Ahora lo escribimos en ecuaciones. Haremos 3 cosas — (a) definir la herramienta para medir en cada punto de la superficie «la intensidad con la que el campo gravitatorio la atraviesa», (b) introducir la notación para sumar sobre toda la superficie, (c) calcular efectivamente para una esfera. Empecemos con (a). Consideremos una esfera de radio \(r\). Imagina que dividimos la esfera en pequeñas baldosas. Cada baldosa tiene un área y una dirección normal hacia fuera. En el límite cuando las baldosas se hacen infinitamente pequeñas, el vector que combina el área y la dirección normal de cada baldosa se escribe como el vector elemento de área \(d\mathbf{A}\) — su magnitud es el área infinitesimal y su dirección es la normal exterior. Es la misma idea que cuando en el instituto tomabas \(\Delta x\) infinitamente pequeño para obtener \(dx\). En el caso de la esfera, todas las normales apuntan en la dirección radial (dirección \(\hat{\mathbf{r}}\)).
🔵 Kai: ¿El vector elemento de área es algo que combina en un solo vector el «área» y el «hacia dónde apunta» de cada baldosa?
🟡 Lina: Así es. Su magnitud es el área de la baldosa y su dirección es la normal exterior. A continuación, en cada baldosa calculamos «la componente del campo gravitatorio perpendicular a la superficie». Esto se expresa con el producto escalar (producto punto) de vectores \(\mathbf{g} \cdot d\mathbf{A}\) — la operación de multiplicar las «componentes en la misma dirección» de dos vectores. Quizás en el instituto aprendiste \(\vec{a} \cdot \vec{b} = |\vec{a}||\vec{b}|\cos\theta\); es lo mismo. En la superficie esférica \(\mathbf{g}\) y \(d\mathbf{A}\) apuntan en direcciones opuestas (el campo gravitatorio hacia dentro, el elemento de área hacia fuera), por lo que \(\cos\theta = \cos 180° = -1\) y el producto escalar es \(-|\mathbf{g}|\,|d\mathbf{A}|\).
🔵 Kai: El campo gravitatorio «entra» en la superficie, pero el elemento de área apunta «hacia fuera», por eso al multiplicarlos sale negativo.
🟡 Lina: Exacto. Que el producto escalar sea negativo significa «el campo entra hacia la superficie» — como hemos tomado la dirección exterior como positiva, la absorción se representa con signo negativo. Es decir, \(\mathbf{g} \cdot d\mathbf{A}\) significa «componente perpendicular a la superficie del campo gravitatorio × área infinitesimal», y en este caso toma un valor negativo.
⚪ Mei: Entiendo, el signo positivo o negativo distingue «fuente» de «sumidero».
🟡 Lina: Así es. Finalmente, el símbolo \(\oint\) es una integral que significa «sumar sobre todas las baldosas de la superficie cerrada» — si el \(\int\) del instituto era «sumar a lo largo de una línea», \(\oint\) es «sumar sobre todas las baldosas de una superficie cerrada». Calculemos concretamente para la esfera. Al sumar las áreas de todas las baldosas obtenemos el área de la esfera \(4\pi r^2\). En cada baldosa \(\mathbf{g} \cdot d\mathbf{A}\) es \(-|\mathbf{g}| \times (\text{área de la baldosa})= -(GM/r^2) \times (\text{área de la baldosa})\). Sumando todas las baldosas:
Los \(r^2\) se cancelan entre numerador y denominador, dando un resultado independiente del radio de la esfera.
🔵 Kai: ¡Oh, realmente \(r\) ha desaparecido! El mismo valor sin importar el tamaño de la esfera.
🟡 Lina: A esto se lo llama la ley de Gauss (versión gravitatoria). El signo negativo en el lado derecho viene de que el campo gravitatorio apunta hacia dentro (hacia el centro) mientras que el elemento de área \(d\mathbf{A}\) se toma positivo hacia fuera. Es un resultado poderoso: no depende de la forma ni del tamaño de la superficie, solo de la masa contenida dentro.
🔵 Kai: ¿Independiente de la forma? ¿Ya sea una esfera o un cubo?
🟡 Lina: Así es. El siguiente paso es traducir la ley de Gauss de «relación sobre toda la superficie» a «propiedad en cada punto». La herramienta matemática para eso es el teorema de la divergencia (divergence theorem).
🟡 Lina: Primero enuncio la afirmación: «el flujo total a través de la superficie cerrada = la suma de las fuentes en cada punto interior integrada sobre el volumen». Intuitivamente, se divide el interior de la superficie cerrada en pequeñas cajas. En las caras compartidas entre cajas adyacentes, el flujo que «sale» de una caja y el que «entra» en la otra se cancelan mutuamente. Lo que queda sin cancelar es el flujo a través de la cara más exterior — es decir, la superficie cerrada original. Por tanto «la suma de las fuentes de todas las cajas» = «el flujo total a través de la superficie exterior». Este concepto de «cancelación entre cajas adyacentes» se puede imaginar como muchas cajas pequeñas alineadas como en la figura izquierda de Fig. 1.6「Imagen intuitiva de la divergencia. Izquierda: fuente (divergencia positiva)」. La demostración rigurosa la puedes verificar en Problema M-1. Derivación de la ecuación de Poisson a partir de la ley de Gauss. Primero explicaré el significado de «fuente en cada punto» y luego lo pondré en ecuaciones.
🔵 Kai: ¿Qué es una «fuente en cada punto»?
🟡 Lina: Piénsalo así. Imagina una caja muy pequeña alrededor de un punto. Si el flujo que sale a través de la superficie de esa caja es positivo, ese punto es una «fuente» — un lugar donde el campo nace como un grifo. Si por el contrario el flujo entra en la caja, es un «sumidero». En el caso de la gravedad, donde hay masa el campo gravitatorio es absorbido desde todas las direcciones, así que la fuente es negativa. Mira Fig. 1.6「Imagen intuitiva de la divergencia. Izquierda: fuente (divergencia positiva)」.
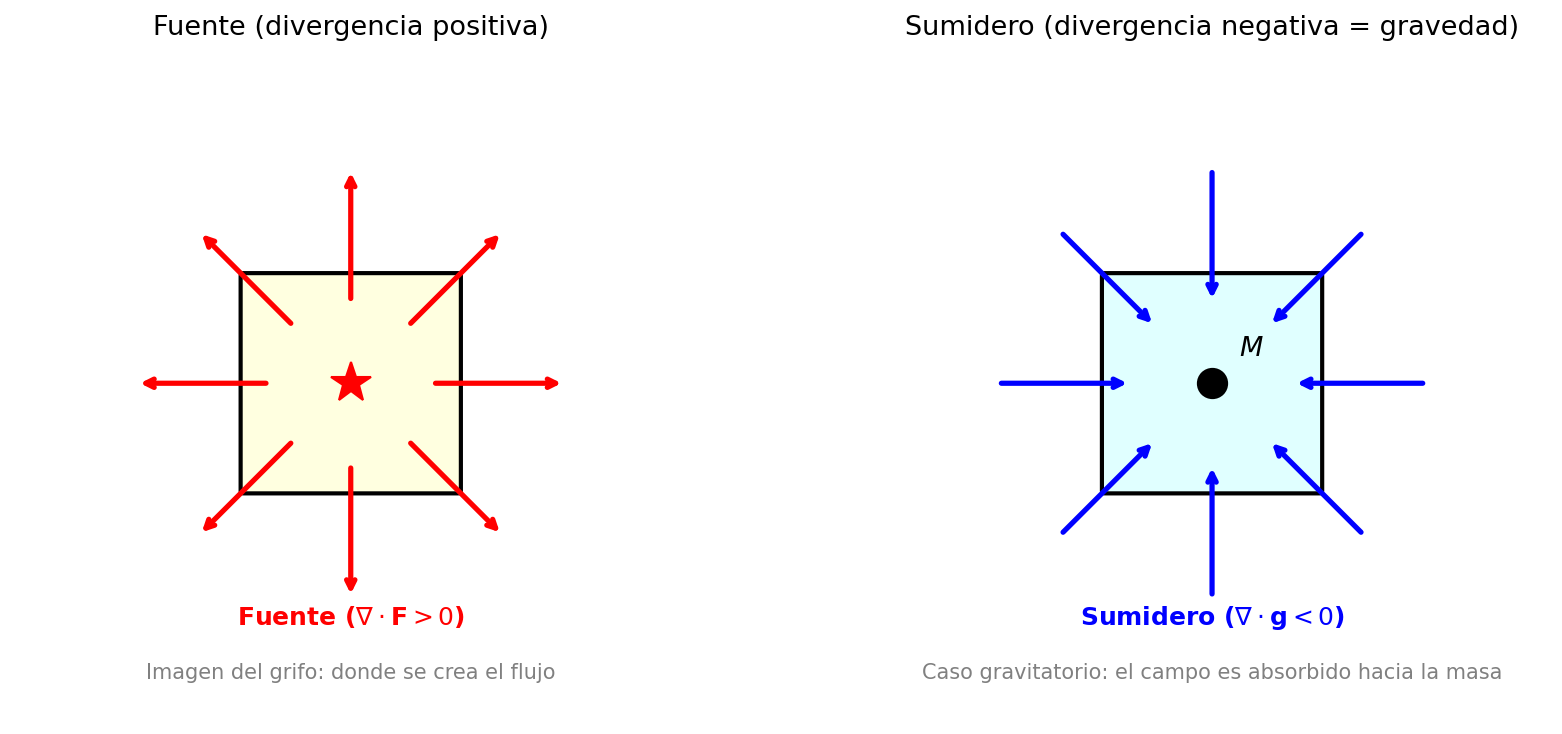
Fig. 1.6: Imagen intuitiva de la divergencia. Izquierda: fuente (divergencia positiva) — como un grifo del que sale flujo de la caja. Derecha: sumidero (divergencia negativa) — en el caso gravitatorio, el campo es absorbido hacia la masa \(M\).
🟡 Lina: La expresión matemática de «la intensidad de la fuente en cada punto» es \(\nabla \cdot \mathbf{g}\) (nabla punto \(\mathbf{g}\)) — una cantidad escalar llamada la divergencia del campo gravitatorio. En coordenadas cartesianas:
Es decir, la suma de cuánto varía cada componente del campo gravitatorio en cada dirección. Mientras que el gradiente \(\nabla\Phi\) era una operación que crea un vector a partir de un escalar, la divergencia \(\nabla \cdot \mathbf{g}\) es una operación que crea un escalar a partir de un vector. El teorema de la divergencia dice «el flujo total a través de la superficie cerrada = la suma de las fuentes en cada punto interior integrada sobre el volumen». En ecuaciones:
El lado izquierdo «flujo total sobre la superficie» es igual al lado derecho «suma de todas las fuentes en los puntos interiores».
🔵 Kai: Es decir, se puede reescribir el total que pasa por la superficie como «la suma de las contribuciones de cada punto interior».
🟡 Lina: Así es. En el lado derecho de la ley de Gauss \(-4\pi GM\), \(M\) es la masa total dentro de la superficie cerrada, así que se puede escribir \(M = \int \rho\, dV\) (la densidad integrada sobre el volumen). Aquí \(\int \rho\, dV\) es la operación de «en cada punto de la región, multiplicar la densidad \(\rho\) por el volumen infinitesimal \(dV\) y sumar todo» — si el \(\int f(x)\,dx\) del instituto era «sumar a lo largo de una línea», \(\int \rho\, dV\) es «sumar sobre todo el volumen». Es decir, el lado derecho es \(-4\pi G \int \rho\, dV\). Aplicando el teorema de la divergencia al lado izquierdo: \(\int_V (\nabla \cdot \mathbf{g})\, dV = -4\pi G \int_V \rho\, dV\). Como esta igualdad se cumple para cualquier región \(V\) que elijamos — si los integrandos no fueran iguales en algún punto, por ejemplo si \(\nabla \cdot \mathbf{g} > -4\pi G\rho\) en algún punto, podríamos elegir una región \(V\) muy pequeña que contenga ese punto y el lado izquierdo sería mayor que el derecho, violando la igualdad. Por tanto los integrandos deben ser iguales en todos los puntos (este argumento lo usaremos también en la derivación de la ecuación de Euler-Lagrange):
⚪ Mei: Se ha traducido la «relación sobre toda la superficie» a una «relación en cada punto» — una conclusión muy fuerte.
🟡 Lina: El signo negativo indica que el campo gravitatorio es «absorbido» hacia la masa. Sustituyendo \(\mathbf{g} = -\nabla\Phi\): \(\nabla \cdot (-\nabla\Phi) = -4\pi G\rho\), es decir \(-\nabla^2\Phi = -4\pi G\rho\). Multiplicando ambos lados por \(-1\) para invertir el signo, obtenemos la ecuación de Poisson:
La demostración del teorema de la divergencia en sí la puedes verificar en Problema M-1. Derivación de la ecuación de Poisson a partir de la ley de Gauss.
🔵 Kai: ¿Qué es el \(4\pi\) en esta ecuación? ¿Por qué aparece el número pi?
🟡 Lina: El \(4\pi\) viene de la ley de Gauss. Mira la ecuación \(\oint \mathbf{g} \cdot d\mathbf{A} = -4\pi GM\). Cuando rodeamos la masa puntual \(M\) con una esfera de radio \(r\), el área de la esfera es \(4\pi r^2\). La magnitud del campo gravitatorio es \(GM/r^2\), y la dirección apunta hacia el centro (hacia dentro). Por otro lado, el elemento de área \(d\mathbf{A}\) toma la dirección exterior como positiva, así que \(\mathbf{g}\) y \(d\mathbf{A}\) son opuestos — el producto escalar es negativo. El flujo es \(-(GM/r^2) \times 4\pi r^2 = -4\pi GM\), que coincide perfectamente con el signo del lado derecho. Es decir, \(4\pi\) es un factor geométrico que proviene del área de la esfera. Es un número que aparece naturalmente de la combinación de la ley del inverso del cuadrado con la simetría esférica del espacio tridimensional.
🔵 Kai: ¿Qué es \(\nabla^2\)?
🟡 Lina: Se llama laplaciano (Laplacian), y en coordenadas cartesianas \((x, y, z)\) es:
Es la suma de las segundas derivadas de \(\Phi\) en cada dirección. Mientras que el gradiente \(\nabla\Phi\) era un vector (con dirección y magnitud), \(\nabla^2\Phi\) es un escalar (solo un número). En el instituto aprendiste que si \(f''(x) > 0\) entonces «el gráfico es cóncavo hacia arriba». Cóncavo hacia arriba significa que el valor en ese punto \(f(x)\) es menor que el promedio de los valores vecinos a izquierda y derecha — es decir, «está hundido respecto al entorno». Inversamente, si \(f''(x) < 0\) es cóncavo hacia abajo y el punto está más alto que el entorno. \(\nabla^2\Phi\) es la extensión a 3 dimensiones de «cuánto se desvía del promedio del entorno». Más precisamente, \(\nabla^2\Phi(P)\) es una cantidad proporcional a «promedio del entorno − valor central \(\Phi(P)\)»; si es positiva, el centro está hundido (más bajo) respecto al entorno. Mira Fig. 1.7「Significado intuitivo del laplaciano」.
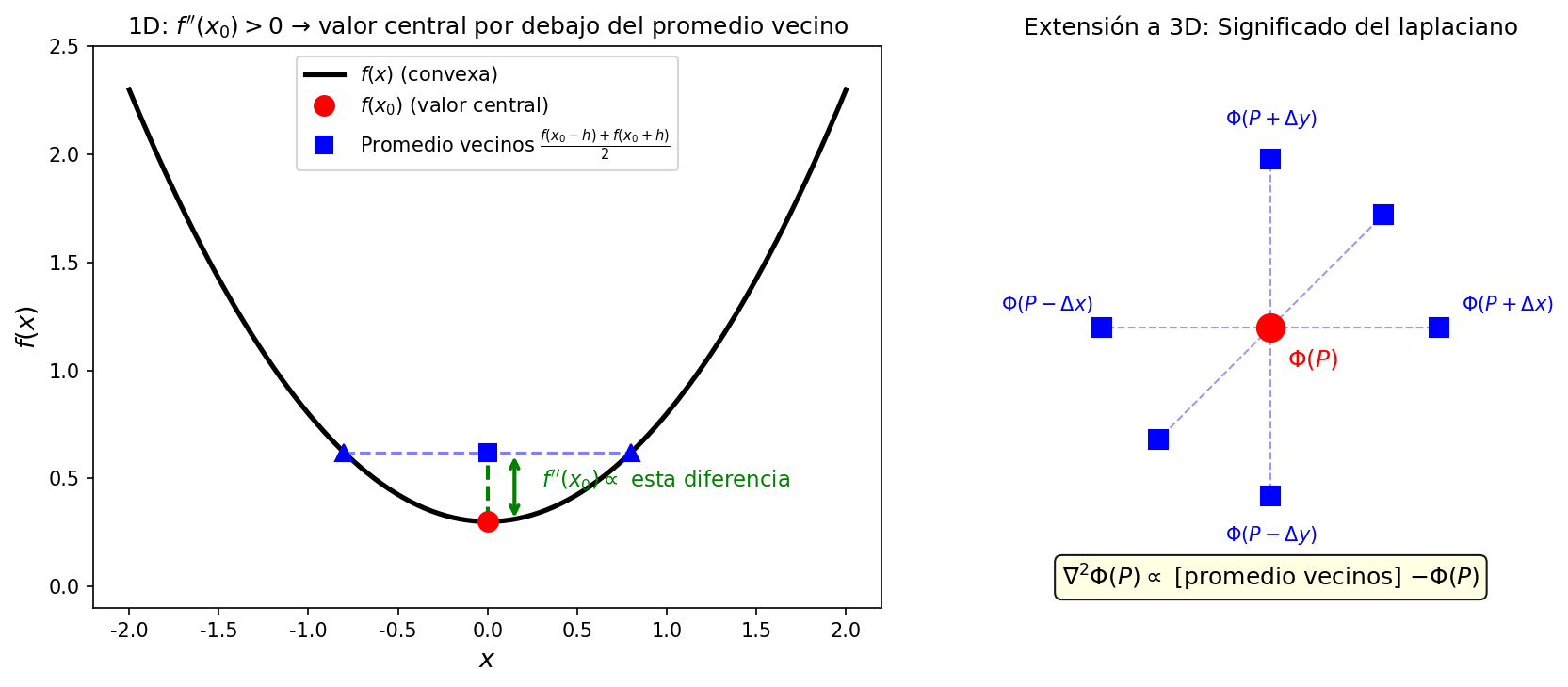
Fig. 1.7: Significado intuitivo del laplaciano. Izquierda: caso 1D. Si \(f''(x_0) > 0\) (cóncavo hacia arriba), el valor central \(f(x_0)\) es menor que el promedio de los vecinos. Derecha: extensión a 3D. El laplaciano \(\nabla^2\Phi(P)\) es proporcional a «promedio de los puntos circundantes − valor central \(\Phi(P)\)» (si es positivo, el centro está hundido).
🟡 Lina: Aquí resumo en una tabla las 3 operaciones de diferenciación que hemos visto hasta ahora.
Tabla 1.1: Las 3 operaciones de diferenciación del análisis vectorial
| Operación | Símbolo | Entrada → Salida | Significado físico |
|---|---|---|---|
| Gradiente | \(\nabla\Phi\) | Escalar → Vector | Dirección de máximo crecimiento y pendiente |
| Divergencia | \(\nabla\cdot\mathbf{g}\) | Vector → Escalar | Intensidad de fuente/sumidero en cada punto |
| Laplaciano | \(\nabla^2\Phi\) | Escalar → Escalar | Desviación respecto al promedio del entorno |
⚪ Mei: Los tipos de entrada y salida son todos diferentes. El gradiente crea un vector a partir de un escalar, la divergencia devuelve un escalar a partir de un vector. Entonces, si aplicas las dos operaciones consecutivamente, tienes «escalar → vector → escalar» y vuelves al tipo original... ¿eso es el laplaciano de la tercera fila?
🟡 Lina: Así es. Y quiero que notes que si aplicas consecutivamente la fila 1 y la fila 2, obtienes escalar → vector → escalar. De hecho \(\nabla^2\Phi = \nabla \cdot (\nabla\Phi)\) — es decir, el laplaciano es la composición de dos etapas: «tomar el gradiente y luego tomar la divergencia». Es una composición de dos etapas escalar → vector → escalar, así que la fila 3 es la combinación de las filas 1 y 2. Que al sustituir \(\mathbf{g} = -\nabla\Phi\) en \(\nabla \cdot \mathbf{g} = -4\pi G\rho\) aparezca \(\nabla^2\Phi\) es precisamente esta estructura.
🔵 Kai: Ya veo, las tres operaciones parecían separadas, pero en realidad el laplaciano es la unión de las dos primeras.
🟡 Lina: Es decir, la ecuación (1.7) dice que «donde existe materia (\(\rho \neq 0\)), \(\nabla^2\Phi > 0\) — en la intuición de antes, el valor del potencial es más bajo que el promedio del entorno (está hundido). Cuanta más materia, más se hunde». Esto es consistente con la imagen de Fig. 1.3「Superficie 3D del potencial gravitatorio」 donde el potencial forma un pozo profundo donde hay masa.
⚪ Mei: El lado izquierdo es la curvatura del potencial, el lado derecho es la cantidad de materia. Así que la relación «la materia es la fuente del campo gravitatorio» está condensada en esta única ecuación.
🟡 Lina: Exacto. La ecuación (1.7) es una ecuación diferencial, así que si introduces la distribución de masa \(\rho(\mathbf{r})\) en el lado derecho y resuelves esta ecuación, obtienes el potencial \(\Phi(\mathbf{r})\), y de ahí con \(\mathbf{g} = -\nabla\Phi\) también se determina el campo gravitatorio.
Aquí voy a presentar una herramienta útil. ¿Cómo expresamos con la densidad \(\rho(\mathbf{r})\) que «la masa está concentrada en un punto»? En todos los puntos excepto el origen \(\rho = 0\), en el origen la densidad es infinita, pero al integrar sobre todo el espacio da la masa \(M\) — a esa «función» infinitamente puntiaguda la llamamos función delta de Dirac \(\delta^3(\mathbf{r})\). El superíndice 3 significa «versión tridimensional» — que es puntiaguda en las 3 direcciones \(x, y, z\).
🔵 Kai: Cero en todas partes excepto el origen, e infinito en el origen... ¿existe esa función?
🟡 Lina: Mira Fig. 1.8「Límite gaussiano de la función delta de Dirac」. Como función ordinaria no existe, pero se puede definir matemáticamente como «un pico infinitamente agudo cuya integral vale 1». La definición se escribe con dos propiedades:
- Para \(\mathbf{r} \neq 0\): \(\delta^3(\mathbf{r}) = 0\)
- Integrada sobre todo el espacio: \(\int \delta^3(\mathbf{r})\, d^3r = 1\)
Es decir, «es cero en todas partes excepto el origen, pero al sumar sobre todo el espacio da exactamente 1» — un objeto límite.
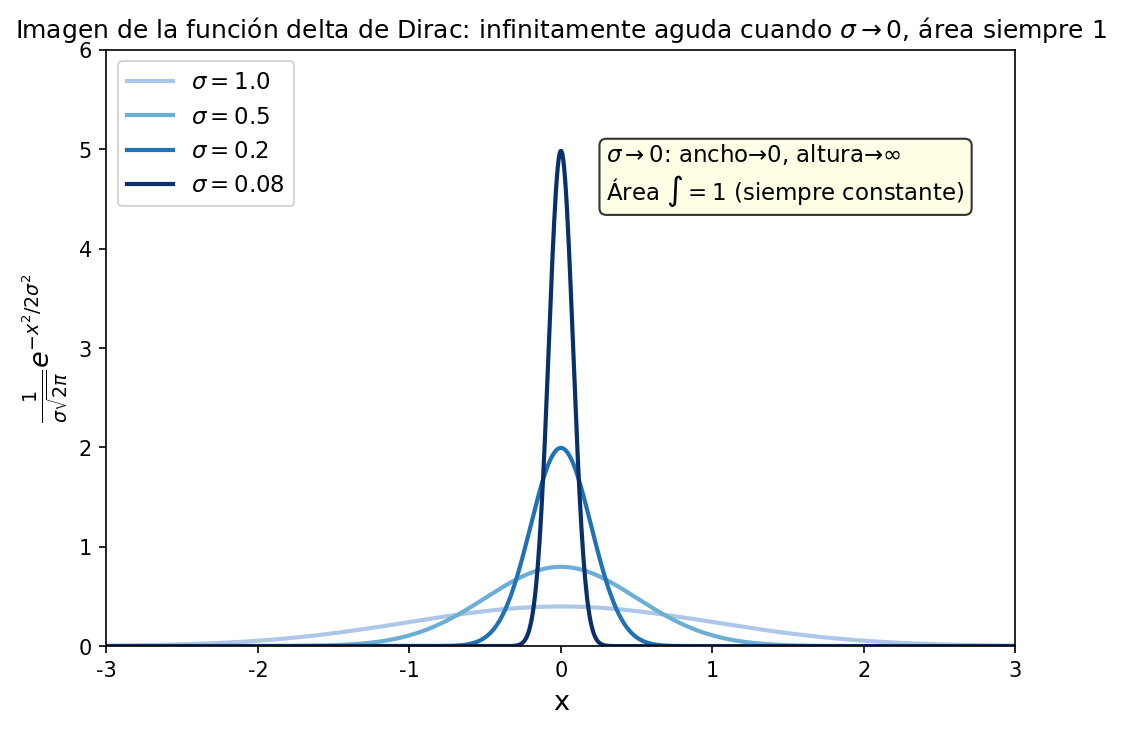
Fig. 1.8: Límite gaussiano de la función delta de Dirac. Imagen de la función delta de Dirac. Al reducir el ancho \(\sigma\) de la función gaussiana, la altura tiende a infinito y el ancho a cero, pero el área (valor de la integral) permanece siempre en 1. El límite \(\sigma \to 0\) es la función delta.
🟡 Lina: La densidad de masa de una masa puntual se escribe como \(\rho(\mathbf{r}) = M\,\delta^3(\mathbf{r})\). Fuera del origen (\(r \neq 0\)) \(\rho = 0\), así que en la región fuera del origen la ecuación de Poisson se convierte en \(\nabla^2\Phi = 0\) (esto se llama la ecuación de Laplace).
⚪ Mei: Donde no hay masa, el laplaciano del potencial es cero — «el promedio del entorno y el valor central coinciden».
🟡 Lina: De manera similar al paso 2, por la simetría esférica \(\Phi\) es función solo de \(r\). Bajo esta condición, al resolver \(\nabla^2\Phi = 0\) se puede demostrar que la solución tiene necesariamente la forma \(\Phi = A/r + B\). Voy a explicar un poco por qué. El laplaciano en coordenadas cartesianas \(\frac{\partial^2\Phi}{\partial x^2} + \frac{\partial^2\Phi}{\partial y^2} + \frac{\partial^2\Phi}{\partial z^2}\) se puede reescribir en coordenadas esféricas \((r, \theta, \phi)\). Las coordenadas esféricas especifican un punto del espacio mediante 3 cantidades: «distancia al centro \(r\)», «ángulo desde el polo norte \(\theta\) (complemento de la latitud)» y «ángulo en dirección este-oeste \(\phi\) (longitud)» — la misma idea que especificar una posición en la Tierra con latitud, longitud y altitud. Son un sistema de coordenadas más natural que las cartesianas para problemas con simetría esférica. Cuando \(\Phi\) es función solo de \(r\), no hay variación con \(\theta\) ni \(\phi\), así que del laplaciano solo queda la contribución en la dirección \(r\): \(\nabla^2\Phi = \frac{1}{r^2}\frac{d}{dr}\left(r^2 \frac{d\Phi}{dr}\right)\).
🔵 Kai: ¿Eh, no es simplemente \(d^2\Phi/dr^2\)? ¿Por qué aparece \(r^2\)?
🟡 Lina: Buena pregunta. El laplaciano era «la desviación respecto al promedio del entorno», ¿verdad? En 3 dimensiones «el entorno» es una superficie esférica, cuya área crece proporcionalmente a \(r^2\). Así que donde \(r\) es grande, «el entorno» es más amplio — el factor \(r^2\) es necesario para incorporar correctamente este efecto de expansión. Más concretamente, \(\frac{d\Phi}{dr}\) es «la pendiente en la dirección \(r\)», y la componente radial del campo gravitatorio era \(g_r = -d\Phi/dr\). Para calcular la divergencia (fuentes) necesitamos ver «la tasa de cambio del flujo a través de la esfera». En una esfera de radio \(r\), la componente radial de \(\nabla\Phi\) es uniformemente \(d\Phi/dr\), así que multiplicando por el área de la esfera \(4\pi r^2\), «la cantidad total de \(\nabla\Phi\) que pasa por la esfera» es \(4\pi r^2 \frac{d\Phi}{dr}\). Como hay simetría esférica, es uniforme en todas direcciones y \(4\pi\) permanece como constante hasta el final. Tomando la tasa de cambio en la dirección \(r\): \(\frac{d}{dr}\left(4\pi r^2 \frac{d\Phi}{dr}\right) = 4\pi \frac{d}{dr}\left(r^2 \frac{d\Phi}{dr}\right)\). Dividiendo por el volumen de la capa esférica \(4\pi r^2\,dr\) para obtener «por unidad de volumen», los \(4\pi\) se simplifican y queda \(\frac{1}{r^2}\frac{d}{dr}\left(r^2 \frac{d\Phi}{dr}\right)\). El cálculo detallado del cambio de coordenadas lo puedes verificar en Problema B-5. Cálculo de \(\nabla^2(r^n)\). Igualando esto a cero: \(\frac{1}{r^2}\frac{d}{dr}\left(r^2 \frac{d\Phi}{dr}\right) = 0\). Como \(1/r^2 \neq 0\), tenemos \(\frac{d}{dr}\left(r^2 \frac{d\Phi}{dr}\right) = 0\). Que la derivada de cierta cantidad sea cero significa que esa cantidad es constante (igual que en el instituto «si \(f'(x) = 0\) entonces \(f(x) = \text{constante}\)»). Por tanto \(r^2 \frac{d\Phi}{dr} = \text{constante}\), es decir \(\frac{d\Phi}{dr} \propto 1/r^2\). Esto tiene la misma forma que \(d\Phi/dr = GM/r^2\) que obtuvimos de la ley del inverso del cuadrado en el paso 2. Integrando obtenemos \(\Phi = A/r + B\).
🔵 Kai: Ya veo, al cambiar a coordenadas esféricas y resolver, la ley del inverso del cuadrado sale de la ecuación de Poisson.
🟡 Lina: Con la condición de que \(\Phi \to 0\) en el infinito (\(B = 0\)) y la condición de intensidad en el origen se determina \(A = -GM\), y se reproduce la ecuación (1.5) \(\Phi = -GM/r\) (la derivación rigurosa la puedes verificar en Problema B-6. Ecuación de Laplace en el exterior de una masa puntual). Calculando la fuerza a partir de ahí:
Se reproduce correctamente la ley del inverso del cuadrado de la gravitación universal.
🔵 Kai: ¡Oh, en el caso de una masa puntual da el mismo resultado que la ecuación (1.1)! Pero como la ecuación (1.7) también puede usarse cuando la masa está distribuida, ¿es una versión extendida de (1.1)?
🟡 Lina: Exactamente. Y — esto será importante más adelante — aunque hayamos reescrito las cosas en lenguaje de campos, la ecuación de Poisson no contiene en absoluto el tiempo \(t\). Este problema estructural lo examinaremos en detalle en la segunda mitad de este capítulo.
✅ Verificación de comprensión: Escribe la relación entre el potencial gravitatorio \(\Phi\) y el campo gravitatorio \(\mathbf{g}\).
Respuesta
\(\mathbf{g} = -\nabla\Phi\). El campo gravitatorio es el gradiente del potencial con signo menos. Los objetos son atraídos en la dirección donde el potencial es más bajo.
✅ Verificación de comprensión: ¿Qué representa físicamente el lado izquierdo \(\nabla^2 \Phi\) de la ecuación de Poisson \(\nabla^2 \Phi = 4\pi G\rho\)?
Respuesta
La «curvatura» espacial del potencial \(\Phi\) (la suma de las segundas derivadas parciales en cada dirección). Donde existe materia (\(\rho \neq 0\)), el potencial presenta curvatura.
✅ Verificación de comprensión: En la ley de Gauss (versión gravitatoria) \(\oint \mathbf{g} \cdot d\mathbf{A} = -4\pi GM\), ¿por qué el lado derecho no cambia al cambiar la forma de la superficie cerrada?
Respuesta
Porque la ley del inverso del cuadrado \(|\mathbf{g}| \propto 1/r^2\) y el área de la esfera \(4\pi r^2\) se cancelan, de modo que el flujo total del campo gravitatorio a través de la superficie no depende de la forma de la superficie, sino solo de la masa contenida dentro.
✅ Verificación de comprensión: Enuncia las 2 propiedades de la función delta de Dirac \(\delta^3(\mathbf{r})\).
Respuesta
(1) Para \(\mathbf{r} \neq 0\): \(\delta^3(\mathbf{r}) = 0\). (2) Integrada sobre todo el espacio: \(\int \delta^3(\mathbf{r})\, d^3r = 1\). Se usa para expresar la densidad de masa de una masa puntual como \(\rho(\mathbf{r}) = M\,\delta^3(\mathbf{r})\).
📝 Ejercicios:
- Cálculo del laplaciano → Problema B-5. Cálculo de \(\nabla^2(r^n)\), Problema B-6. Ecuación de Laplace en el exterior de una masa puntual, esfera de densidad uniforme → Problema B-7. Constante del potencial en el interior de una esfera de densidad uniforme, derivación de la ecuación de Poisson a partir de la ley de Gauss → Problema M-1. Derivación de la ecuación de Poisson a partir de la ley de Gauss, potencial de una esfera de densidad uniforme → Problema M-2. Solución completa del potencial de una esfera de densidad uniforme
1.3 Caso de éxito: El descubrimiento de Neptuno¶
🟡 Lina: Antes de pasar a hablar de las limitaciones, confirmemos lo poderoso que fue el modelo de Newton. Voy a presentar el ejemplo más dramático: el descubrimiento de Neptuno (Neptune).
🔵 Kai: Neptuno, ¿no se descubrió mirando por un telescopio?
🟡 Lina: Se «confirmó» con un telescopio. Pero primero se encontró sobre el papel y con un bolígrafo. Después de que Urano (Uranus) fuera descubierto en 1781, los astrónomos calcularon la órbita de Urano usando el modelo de Newton. Sin embargo, la posición observada de Urano se desviaba ligeramente de la posición predicha por el cálculo.
🔵 Kai: Si hay una desviación, ¿cómo se razona? ¿El modelo está equivocado, o hay algo que se ha pasado por alto?
🟡 Lina: Buena pregunta. Hay dos posibilidades: «el modelo de Newton está equivocado» o «hay un cuerpo celeste aún no descubierto que está tirando de Urano». En 1846, Le Verrier en Francia y Adams en Inglaterra calcularon independientemente que «si hay un planeta desconocido en tal posición, se puede explicar la desviación de la órbita de Urano». Le Verrier envió una carta al Observatorio de Berlín a Galle pidiéndole «apunta el telescopio en esta dirección».
🔵 Kai: ¿Y qué pasó?
🟡 Lina: La misma noche que Galle apuntó el telescopio, encontró un nuevo planeta a menos de 1° de la posición predicha por Le Verrier. Ese fue Neptuno.
🔵 Kai: ¡Increíble! ¿Encontraron un planeta solo con cálculos?
🟡 Lina: Este es precisamente un ejemplo real del «poder de las ecuaciones» del que hablamos en el prólogo. El modelo de Newton dio una predicción cuantitativa, y esa predicción fue confirmada por la observación. Un momento en que una hipótesis refutable resistió la verificación. Es el mejor caso de éxito que muestra el poder del modelo de Newton.
✅ Verificación de comprensión: Ante la desviación de la órbita de Urano, ¿qué hipótesis planteó Le Verrier?
Respuesta
En lugar de «el modelo de Newton está equivocado», planteó la hipótesis de que «un planeta desconocido aún no descubierto está tirando de Urano» y calculó la posición de ese planeta. De hecho, Neptuno fue descubierto en esa posición.
✅ Verificación de comprensión: ¿Por qué se dice que el descubrimiento de Neptuno es un «caso de éxito» del modelo de Newton?
Respuesta
Porque a partir de la desviación de la órbita de Urano se calculó la posición de un planeta desconocido con el modelo de Newton, y Neptuno fue realmente descubierto a menos de 1° de la posición predicha. Una predicción cuantitativa mediante ecuaciones fue confirmada por la observación.
1.4 Limitación ①: La precesión del perihelio de Mercurio¶
🟡 Lina: Sin embargo, el mismo Le Verrier también descubrió un fenómeno que no podía explicarse con el modelo de Newton: la precesión del perihelio de Mercurio (Mercury) (precession of perihelion).
🔵 Kai: ¿Qué es la precesión del perihelio?
🟡 Lina: Los planetas orbitan alrededor del Sol en órbitas elípticas. Una elipse tiene un punto más cercano al Sol, que se llama perihelio (perihelion). Si solo estuvieran el Sol y el planeta, en el modelo de Newton la órbita elíptica se repetiría eternamente con la misma forma. Pero en realidad, debido a la influencia gravitatoria de otros planetas, la orientación de la elipse — es decir, la posición del perihelio — rota poco a poco. Esto es la precesión del perihelio.
🔵 Kai: La parte debida a que otros planetas tiran, ¿no se puede calcular con el modelo de Newton?
🟡 Lina: Sí. Le Verrier calculó con precisión la influencia de todos los planetas conocidos — Venus, Júpiter, la Tierra, etc. — usando el modelo de Newton. Sin embargo, el valor calculado y el observado no coincidían. La precesión del perihelio de Mercurio observada era mayor que la predicción del modelo de Newton en aproximadamente 43 segundos de arco (arcsecond) por siglo.
🔵 Kai: 43 segundos de arco, ¿cuánto es eso?
🟡 Lina: 1 segundo de arco es 1/3600 de un grado. Es decir, 43 segundos de arco son unos 0,012 grados. Esto en 100 años. Una desviación increíblemente pequeña.
🔵 Kai: Una desviación tan pequeña, ¿no será un error de medición?
🟡 Lina: Buena pregunta. Pero la precisión observacional de los astrónomos del siglo XIX era sorprendentemente alta, y esta desviación superaba con creces el error de medición. Le Verrier intentó la misma estrategia que con Neptuno — «hay un planeta desconocido» — y predijo que existía un planeta llamado Vulcano (Vulcan) más cercano al Sol que Mercurio.
🔵 Kai: ¿Se encontró como con Neptuno?
🟡 Lina: No. Se buscó durante décadas pero Vulcano nunca fue encontrado. Esta es una situación donde la predicción del modelo de Newton no coincide con la observación — es decir, está siendo cuasi-refutado. En palabras del prólogo, el modelo de Newton ya no podía considerarse «la mejor hipótesis que no contradice los experimentos».
⚪ Mei: Con Neptuno, la hipótesis de «un planeta desconocido» tuvo éxito, pero con Mercurio la misma estrategia falló — surgió la posibilidad de que el problema esté en el modelo mismo.
🟡 Lina: Mira Fig. 1.9「Precesión del perihelio de Mercurio (dibujada con exageración)」. Es un dibujo exagerado de cómo el perihelio de la órbita elíptica rota poco a poco con cada revolución.
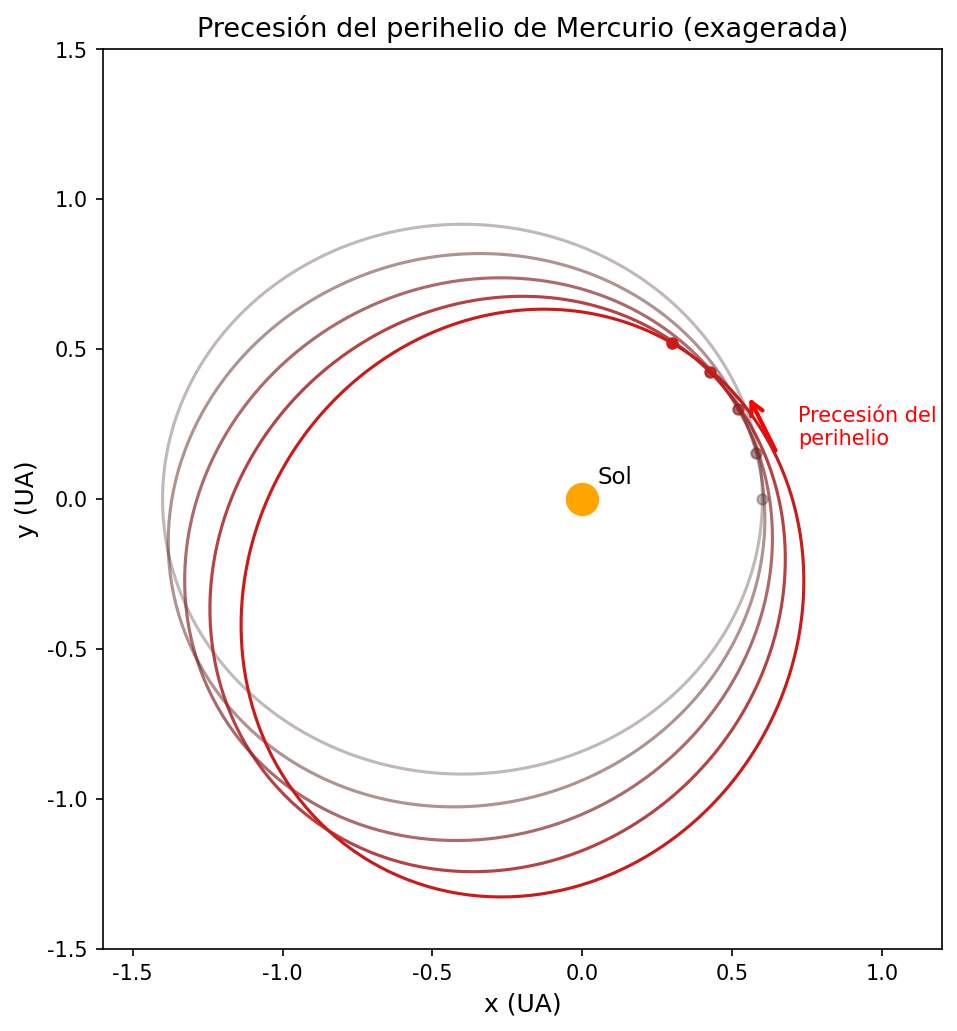
Fig. 1.9: Precesión del perihelio de Mercurio (dibujada con exageración). El perihelio (punto más cercano al Sol) de la órbita elíptica rota poco a poco con cada revolución. En el modelo de Newton, incluso considerando la influencia de otros planetas, queda un residuo de 43 segundos de arco por siglo.
✅ Verificación de comprensión: En el problema de la precesión del perihelio de Mercurio, Le Verrier intentó la misma estrategia que con Neptuno pero fracasó. ¿Cuál era esa estrategia?
Respuesta
Asumió que existía un planeta desconocido llamado Vulcano más cercano al Sol que Mercurio, que explicaría la desviación de la órbita de Mercurio. Sin embargo, tras décadas de búsqueda, Vulcano nunca fue encontrado y la estrategia fracasó.
🟡 Lina: Esta desviación de 43 segundos de arco fue explicada sin parámetros adicionales cuando Einstein completó la relatividad general en 1915. El propio Einstein, al obtener este resultado, contó que «durante varios días no pude contener la excitación».
✅ Verificación de comprensión: ¿Cuántos segundos de arco por siglo es la discrepancia entre la predicción del modelo de Newton y la observación en la precesión del perihelio de Mercurio?
Respuesta
Aproximadamente 43 segundos de arco (arcsecond). Esta discrepancia fue explicada por la relatividad general de Einstein en 1915 sin parámetros adicionales.
📝 Ejercicios:
- Estimación de escala de la precesión del perihelio de Mercurio → Problema M-3. Estimación de escala del avance del perihelio de Mercurio
1.5 Limitación ②: Propagación instantánea de la gravedad — problema estructural de la ecuación de Poisson¶
🟡 Lina: La precesión del perihelio de Mercurio era un problema empírico — una «discrepancia con la observación». Pero el modelo de Newton tiene un problema más fundamental — un problema oculto en la estructura misma de la teoría.
🔵 Kai: ¿Un problema de estructura?
🟡 Lina: Mira de nuevo la ecuación (1.1) de la gravitación universal.
Esta ecuación no contiene en absoluto el tiempo \(t\). Es decir, si el Sol desapareciera repentinamente, \(m_1 = 0\) y \(F = 0\) — la Tierra dejaría de sentir la gravedad del Sol en ese mismo instante. A pesar de estar a 150 millones de km.
🔵 Kai: ¿La luz tarda unos 8 minutos en llegar del Sol a la Tierra, pero la información gravitatoria llega en 0 segundos?
🟡 Lina: Así es. A esto se le llama el problema de la acción a distancia instantánea (action at a distance). De hecho, el propio Newton se sentía insatisfecho con este punto. En una carta a un amigo escribió: «Que la materia actúe sobre otra materia sin intermediario alguno, a distancia, es una idea tan absurda que ninguna persona capaz de reflexión filosófica puede aceptarla».
🔵 Kai: ¿El propio Newton pensaba que era «extraño»?
🟡 Lina: Y en la ecuación de Poisson (1.7) se ve el mismo problema estructural. El lado izquierdo \(\nabla^2\Phi\) solo contiene derivadas espaciales. No hay derivadas temporales \(\partial^2\Phi/\partial t^2\) en ninguna parte.
🔵 Kai: ¿Eso significa que en el momento en que \(\rho\) cambia en el lado derecho, \(\Phi\) cambia simultáneamente en todo el espacio?
🟡 Lina: Exactamente. La ecuación de Poisson asume implícitamente que los cambios del campo gravitatorio se propagan a velocidad infinita. Si el Sol desapareciera de repente, incluso a 150 millones de km la gravedad desaparecería en ese mismo instante en la Tierra.
🔵 Kai: Pero, ¿qué tiene de malo eso?
🟡 Lina: Aquí voy a adelantar una sola conclusión de la relatividad especial, que trataremos en detalle en capítulos posteriores. Según la relatividad especial, ninguna señal puede propagarse más rápido que la velocidad de la luz \(c \approx 3.0 \times 10^8\ \mathrm{m/s}\). La luz tarda unos 8 minutos en llegar del Sol a la Tierra. La «información» de que el Sol ha desaparecido debería tardar al menos 8 minutos.
⚪ Mei: Es decir, la gravedad de Newton asume implícitamente que «la información se transmite instantáneamente», y eso contradice frontalmente el principio fundamental de la relatividad especial.
🟡 Lina: En contraste, las ecuaciones de campo del electromagnetismo (una vez que se fija la libertad restante en la elección del potencial mediante una «condición de gauge», que es una organización matemática) toman esta forma:
Aquí \(\varphi\) es el potencial escalar electromagnético (correspondiente al \(\Phi\) gravitatorio), \(\rho_e\) es la densidad de carga (correspondiente a la densidad de masa \(\rho\) en gravedad), \(\varepsilon_0\) es la permitividad del vacío (una constante electromagnética que aparece en la ley de Coulomb \(F = \frac{1}{4\pi\varepsilon_0}\frac{q_1 q_2}{r^2}\)). El signo menos del lado derecho es una convención del sistema de unidades, no te preocupes por ahora. Ahora más que los detalles de cada símbolo, fíjate en la estructura de la ecuación. Esta ecuación tiene la forma de una ecuación de onda. Voy a darte solo la intuición de por qué es una onda de velocidad \(c\). Pensando en una dimensión: \(\frac{\partial^2 \varphi}{\partial x^2} = \frac{1}{c^2}\frac{\partial^2 \varphi}{\partial t^2}\). La solución de esta ecuación es \(\varphi(x, t) = f(x - ct)\) — es decir, «una onda que se mueve a velocidad \(c\) sin cambiar de forma».
🔵 Kai: ¿Cómo es que \(f(x - ct)\) es una onda?
🟡 Lina: Piénsalo así. En el instante \(t = 0\), \(\varphi = f(x)\) tiene cierta forma. En el instante \(t\): \(\varphi = f(x - ct)\). El lugar donde el argumento de \(f\) toma el mismo valor — por ejemplo, la cima de la montaña — está en \(x - ct = \text{constante}\), es decir \(x = ct + \text{constante}\). Eso se mueve hacia la derecha a velocidad \(c\). Por tanto \(f(x - ct)\) es «una onda que avanza a velocidad \(c\) manteniendo su forma».
🔵 Kai: Ah, si sigues la posición de la cima de la montaña, avanza \(c\) cada segundo hacia la derecha.
🟡 Lina: Así es. Comprobémoslo sustituyendo. Ponemos \(u = x - ct\). Para derivar parcialmente \(\varphi = f(u)\) respecto a \(x\), usamos la regla de la cadena de la derivada de funciones compuestas que se aprende en el instituto: \(\frac{d}{dx}f(g(x)) = f'(g(x)) \cdot g'(x)\). Aquí \(f'(u)\) es «\(f\) derivada ordinariamente respecto a la variable \(u\)» (\(f\) es una función de una sola variable \(u\), así que es una derivada ordinaria, no parcial). Como \(u = x - ct\), \(\partial u/\partial x = 1\) (\(t\) fijo). Por tanto \(\frac{\partial \varphi}{\partial x} = f'(u) \cdot 1 = f'(u)\), derivando otra vez \(\frac{\partial^2 \varphi}{\partial x^2} = f''(u)\). Por otro lado, derivando parcialmente respecto a \(t\), \(\partial u/\partial t = -c\) (\(x\) fijo), así que \(\frac{\partial \varphi}{\partial t} = f'(u) \cdot (-c) = -c\,f'(u)\), derivando otra vez \(\frac{\partial^2 \varphi}{\partial t^2} = (-c)^2 f''(u) = c^2 f''(u)\). Por tanto \(\frac{\partial^2\varphi}{\partial x^2} = f''(u)\) y \(\frac{1}{c^2}\frac{\partial^2\varphi}{\partial t^2} = \frac{1}{c^2} \cdot c^2 f''(u) = f''(u)\) son iguales, y efectivamente satisface la ecuación.
⚪ Mei: Coincide limpiamente. Los \(c^2\) se cancelan entre numerador y denominador dando \(f''(u) = f''(u)\).
🟡 Lina: La combinación de \(\nabla^2\) y \(\frac{1}{c^2}\frac{\partial^2}{\partial t^2}\) es precisamente la estructura que describe «una onda que se propaga a velocidad \(c\)». Eso es la onda electromagnética. Es decir, la estructura de la ecuación — si tiene o no derivada temporal — determina cómo se propagan los cambios del campo.
⚪ Mei: Es decir, que la ecuación de campo tenga o no la segunda derivada temporal determina si «los cambios se propagan instantáneamente o como ondas a velocidad finita».
🟡 Lina: Exacto. La estructura de la ecuación gobierna la física — la forma de propagación. En regiones sin fuentes (\(\rho_e = 0\)) el lado derecho se anula y queda una ecuación de onda pura \(\nabla^2\varphi = \frac{1}{c^2}\frac{\partial^2 \varphi}{\partial t^2}\). Si ponemos en una tabla la ecuación de Poisson de la gravedad y la ecuación de onda del electromagnetismo, el problema se ve de un vistazo.
Tabla 1.2: Comparación de las ecuaciones de campo de la gravedad de Newton y el electromagnetismo
| Gravedad de Newton | Electromagnetismo | |
|---|---|---|
| Ecuación de campo | \(\nabla^2 \Phi = 4\pi G\rho\) | \(\left(\nabla^2 - \frac{1}{c^2}\frac{\partial^2}{\partial t^2}\right)\varphi = -\frac{\rho_e}{\varepsilon_0}\) |
| Derivada temporal | No tiene | Sí (\(\partial^2/\partial t^2\)) |
| Velocidad de propagación | Infinita | Velocidad de la luz \(c\) |
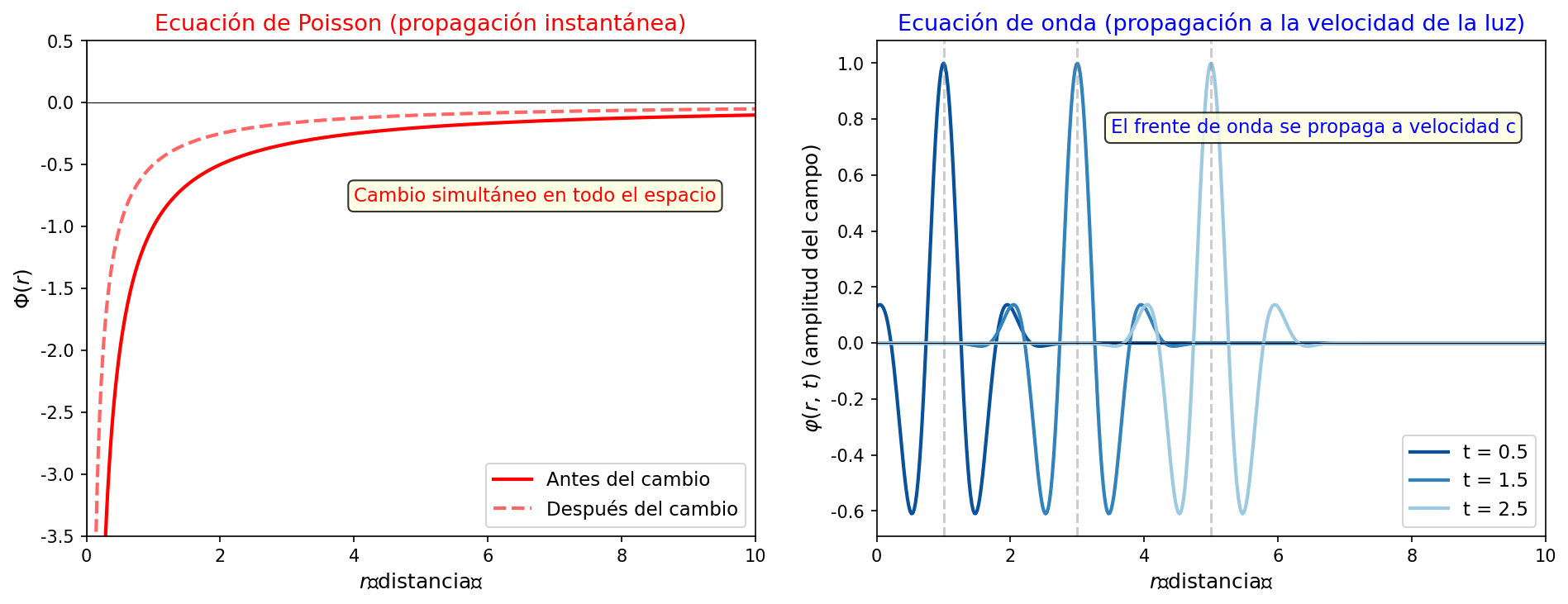
Fig. 1.10: Comparación entre la ecuación de Poisson y la ecuación de onda. Izquierda — En la ecuación de Poisson, los cambios del campo ocurren simultáneamente en todo el espacio (propagación instantánea). Derecha — En la ecuación de onda, los cambios del campo se propagan como un frente de onda a la velocidad de la luz \(c\).
🟡 Lina: Al resumirlo en una tabla, la diferencia estructural se ve de un vistazo. Mira también Fig. 1.10「Comparación entre la ecuación de Poisson y la ecuación de onda. Izquierda」. A la izquierda, en la ecuación de Poisson los cambios del campo ocurren simultáneamente en todo el espacio, mientras que a la derecha, en la ecuación de onda se dibuja cómo se expanden como frente de onda a la velocidad de la luz \(c\).
⚪ Mei: Solo con la presencia o ausencia de la derivada temporal, la velocidad de propagación queda determinada como «infinita» o «la velocidad de la luz».
🔵 Kai: Entonces, ¿la gravedad de Newton es «imposible» en un universo donde la información viaja a la velocidad de la luz? Pero si le añadiéramos \(\frac{1}{c^2}\frac{\partial^2}{\partial t^2}\) a la ecuación de Newton, ¿no se arreglaría?
🟡 Lina: Buena idea. De hecho hubo intentos así. Pero simplemente añadir un término de derivada temporal contradice otras exigencias físicas. Por ejemplo, la gravedad siempre es atractiva (los cuerpos se atraen), ¿verdad? Sin embargo, al hacer una ecuación de onda, «ondas repulsivas» también se admiten como soluciones, lo que no concuerda con el hecho observacional de que la gravedad siempre es atractiva. La corrección correcta es algo mucho más fundamental — cambiar la estructura del espaciotiempo mismo. Eso es la relatividad general. Los detalles los puedes verificar en Problema A-1. Intento de una teoría escalar de la gravedad.
✅ Verificación de comprensión: ¿Qué significa físicamente que la ecuación de Poisson no contenga la derivada temporal \(\partial^2/\partial t^2\)?
Respuesta
Significa que los cambios del campo gravitatorio se propagan a velocidad infinita (instantáneamente). Esto contradice el principio de la relatividad especial de que «ninguna señal puede propagarse más rápido que la velocidad de la luz».
📝 Ejercicios:
- Contradicción de la propagación instantánea → Problema B-9. Contradicción entre la propagación instantánea y la relatividad especial, comparación entre ecuación de onda y ecuación de Poisson → Problema M-4. Comparación entre la ecuación de ondas y la ecuación de Poisson, intento de una teoría escalar de la gravedad → Problema A-1. Intento de una teoría escalar de la gravedad
🟡 Lina: Por tanto, el modelo gravitatorio de Newton no es más que una aproximación de un modelo más preciso. En las escalas cotidianas y en la mayoría de los escenarios del movimiento planetario del sistema solar, el modelo de Newton es sorprendentemente preciso. Pero en situaciones extremas como velocidades cercanas a la de la luz o campos gravitatorios muy intensos, se necesita un modelo más preciso.
1.6 ¿Cuándo se vuelve insuficiente el modelo de Newton?¶
🟡 Lina: Finalmente, revisemos una vez más el criterio de evaluación que presentamos en el prólogo. Usando la masa \(M\) y el radio característico \(R\) de un cuerpo celeste — para una estrella es el radio de la superficie, para un agujero negro es el radio de Schwarzschild que aprenderemos más adelante — calculamos
una cantidad adimensional (dimensionless quantity).
⚪ Mei: ¿Por qué esta cantidad sirve como criterio?
🟡 Lina: En la primera mitad de este capítulo aprendimos que el potencial gravitatorio es \(\Phi = -GM/r\) (ecuación 1.5). El potencial \(\Phi\) es una cantidad que corresponde a «energía por unidad de masa», así que la energía potencial gravitatoria de un objeto de masa \(m\) es \(U = m\Phi\) — la generalización del \(U = mgh\) que aprendiste en el instituto (cerca de la superficie terrestre \(\Phi \approx gh\), así que \(U = m\Phi = mgh\)). En la superficie del cuerpo celeste (\(r = R\)): \(U = m\Phi = -GMm/R\). Por otro lado, según la relatividad especial, la energía en reposo de un objeto es \(E = mc^2\). Tomando la razón de ambas:
La \(m\) se cancela y queda una cantidad adimensional que depende solo de las propiedades del cuerpo celeste (\(M\) y \(R\)).
🔵 Kai: Ah, es la razón entre la energía gravitatoria y la energía en reposo. Por eso se divide por \(c^2\).
🟡 Lina: Así es. Cuando esta razón es pequeña — cuando la energía potencial gravitatoria es mucho menor que la energía en reposo — el modelo de Newton es una excelente aproximación. Pero cuando se acerca a 1, la curvatura del espaciotiempo que la aproximación de Newton no puede captar se vuelve imposible de ignorar. Reproduzco la tabla del prólogo.
Tabla 1.3: Indicador de compacidad de cuerpos celestes representativos
| Cuerpo celeste | Orden de \(GM/(Rc^2)\) |
|---|---|
| Tierra | \(\sim 10^{-9}\) |
| Sol | \(\sim 10^{-6}\) |
| Enana blanca (white dwarf) | \(\sim 10^{-4}\) |
| Estrella de neutrones (neutron star) | \(\sim 0.1\) |
| Agujero negro (black hole) | \(\sim 1\) |
⚪ Mei: Que la desviación de la precesión del perihelio de Mercurio fuera pequeña (43 segundos de arco en 100 años) se corresponde con que \(GM/(Rc^2) \sim 10^{-6}\) del Sol es pequeño. La desviación respecto al modelo de Newton es pequeña pero no cero.
🟡 Lina: Y como vimos en el prólogo, incluso el \(10^{-9}\) de la Tierra no puede ignorarse en tecnología de precisión como los relojes atómicos del GPS. No solo cuando \(GM/(Rc^2)\) es grande, sino también cuando la precisión de la medición es comparable a este valor, se necesita la relatividad general. En Fig. 1.11「Rango de aplicabilidad del modelo de Newton e indicador relativista」 resumí los valores para cada cuerpo celeste.
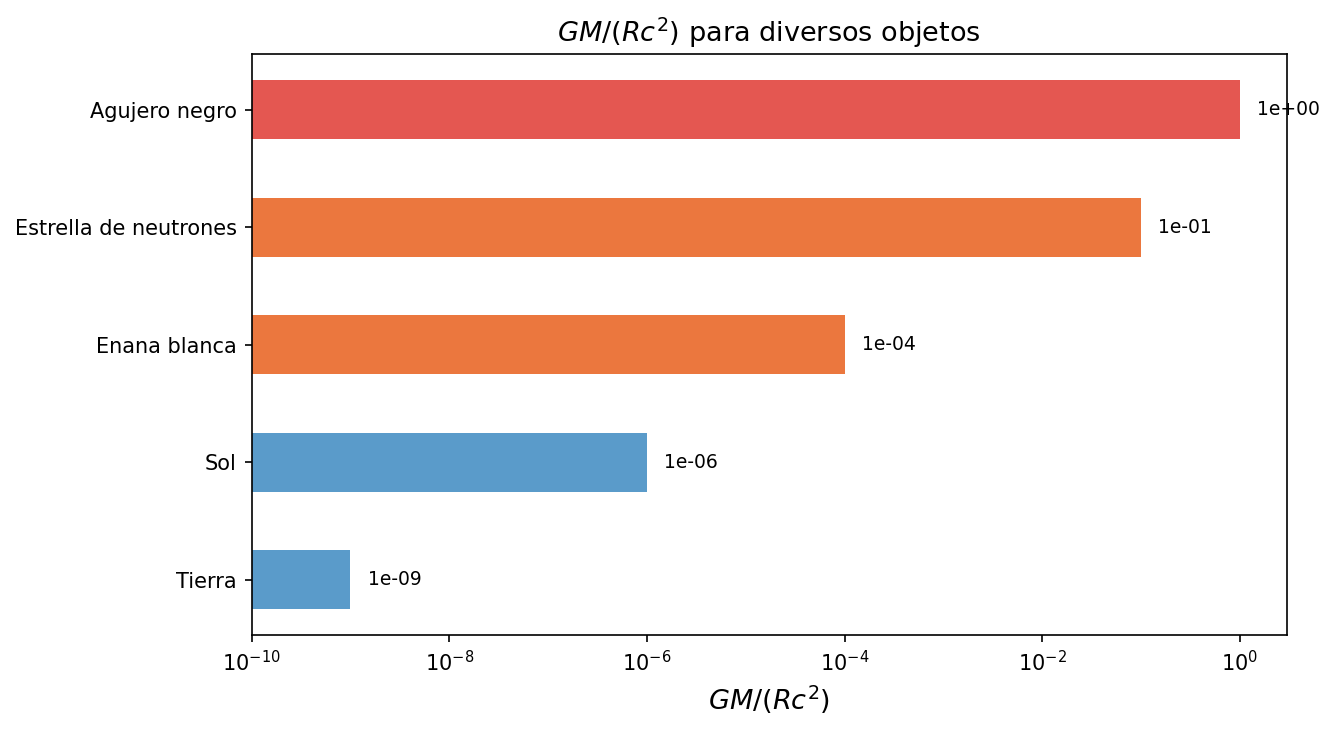
Fig. 1.11: Rango de aplicabilidad del modelo de Newton e indicador relativista. Valor de \(GM/(Rc^2)\) para cada cuerpo celeste. Cuanto mayor es este valor, más pronunciados son los efectos de la relatividad general.
✅ Verificación de comprensión: ¿Por qué puede ser necesaria la relatividad general incluso para la Tierra, donde \(GM/(Rc^2) \sim 10^{-9}\)?
Respuesta
Porque en tecnologías con precisión extremadamente alta como los relojes atómicos del GPS, efectos relativistas del orden de \(10^{-9}\) no pueden ignorarse. Aunque \(GM/(Rc^2)\) sea pequeño, si la precisión de la medición es comparable a ese valor, se necesita la relatividad general.
✅ Verificación de comprensión: ¿Qué razón de cantidades físicas representa \(GM/(Rc^2)\)?
Respuesta
La razón entre la energía potencial gravitatoria en la superficie del cuerpo celeste \(|U| = GMm/R\) y la energía en reposo \(E = mc^2\). Cuando esta razón se acerca a 1, la curvatura del espaciotiempo que la aproximación de Newton no puede captar se vuelve imposible de ignorar.
📝 Ejercicios:
- Cálculo de \(GM/(Rc^2)\) → Problema B-10. Estimación de los efectos relativistas en la superficie del Sol, Problema B-11. Estimación del parámetro relativista de una estrella de neutrones, relación entre velocidad de escape y \(GM/(Rc^2)\) → Problema B-5. Derivación del radio de Schwarzschild, Problema B-6. Criterio de evaluación en el radio de Schwarzschild, teorema de la capa esférica y fuerzas de marea → Problema A-2. Teorema de la corteza esférica y fuerza de marea
🟡 Lina: Exacto. El modelo de Newton es excelente como aproximación. Pero no deja de ser una aproximación. El modelo que va más allá de esta aproximación es la relatividad general de Einstein. Antes de recorrer el camino hacia ella, hay una cosa más que quiero preparar.
1.7 Otra formulación — el principio de mínima acción¶
🟡 Lina: Aquí cambio de tema para presentar otra formulación de la mecánica de Newton.
🔵 Kai: Eh, ¿estábamos hablando de las limitaciones de Newton y ahora introducimos una formulación diferente?
🟡 Lina: Buena pregunta. La razón es que en la relatividad general que viene después, \(F = ma\) no se puede usar. En la relatividad general, la gravedad se describe no como una «fuerza» sino como «curvatura del espaciotiempo» — un objeto moviéndose libremente en un espaciotiempo curvo parece acelerarse aunque no recibe ninguna fuerza. Por tanto el marco de «la fuerza genera la aceleración» (\(F = ma\)) deja de ser aplicable. En su lugar usamos lo que voy a presentar ahora: el principio de mínima acción. Tanto la Cap. 8 ecuación geodésica como la Cap. 14 ecuación de Einstein como la Apéndice C teoría de campos se derivan todas de este principio. Es decir, este será el «lenguaje común» que usaremos en todos los capítulos que vienen.
⚪ Mei: Así que la idea es familiarizarnos con la herramienta mientras todavía estamos en la mecánica de Newton, que es más sencilla.
🟡 Lina: Exacto. Hoy vamos a rederivir \(F = ma\) a partir del principio de mínima acción. La respuesta es la misma, pero el marco de derivación es diferente. Si dominas este marco, podrás obtener las ecuaciones de movimiento con el mismo procedimiento incluso en espaciotiempo curvo.
🔵 Kai: ¿Si es la misma física pero descrita desde una perspectiva totalmente diferente, concretamente en qué se diferencia? \(F = ma\) es una historia de causa y efecto: «si se aplica una fuerza, hay aceleración». ¿Qué otra perspectiva hay?
🟡 Lina: Buena pregunta. El \(F = ma\) de Newton es una descripción causal — «la fuerza determina la aceleración» — «la fuerza actual determina el movimiento del instante siguiente», una cadena de causalidad. El principio de mínima acción adopta una perspectiva completamente diferente — «se contempla el camino completo desde el punto de partida hasta el punto de llegada como un todo, y el camino que se realiza es el que hace extremal cierta cantidad» — por así decirlo, un punto de vista de «optimización global». No es una cadena causal, sino que el movimiento se determina por una propiedad de la trayectoria completa.
🟡 Lina: Veamos un ejemplo concreto. Lanzas una pelota hacia arriba. En el método de Newton se piensa «en cada instante la gravedad \(F = -mg\) genera la aceleración \(a = -g\)» y se avanza paso a paso en el tiempo resolviendo la ecuación de movimiento — una cadena de causalidad donde «la fuerza actual determina el movimiento del instante siguiente».
🔵 Kai: El estado en el instante 0 se usa para calcular el estado en el instante 1, el del instante 1 para el instante 2... como fichas de dominó cayendo una tras otra.
🟡 Lina: Así es. En el principio de mínima acción se toma una perspectiva completamente diferente. Se contempla la trayectoria desde el punto de partida hasta el punto de llegada como un todo y se juzga «qué trayectoria es elegida naturalmente»:
🟡 Lina: «De todas las trayectorias que la pelota podría tomar, la que hace extremal (estacionario) una cantidad llamada acción es la trayectoria que la pelota realmente sigue» — esto es el principio de mínima acción (principle of least action). Estacionario significa «la variación de primer orden es cero» — igual que en el instituto un punto donde \(f'(x) = 0\) (punto estacionario) puede ser tanto máximo como mínimo, la trayectoria con \(\delta S = 0\) no tiene por qué ser la que minimiza la acción; también puede ser un máximo o un punto de silla. Pero históricamente se le llama «principio de mínima acción».
🟡 Lina: Mira Fig. 1.12「Principio de mínima acción: selección de la trayectoria」. Las líneas grises son ejemplos de «trayectorias posibles», y la línea gruesa roja es la trayectoria que la naturaleza «elige».
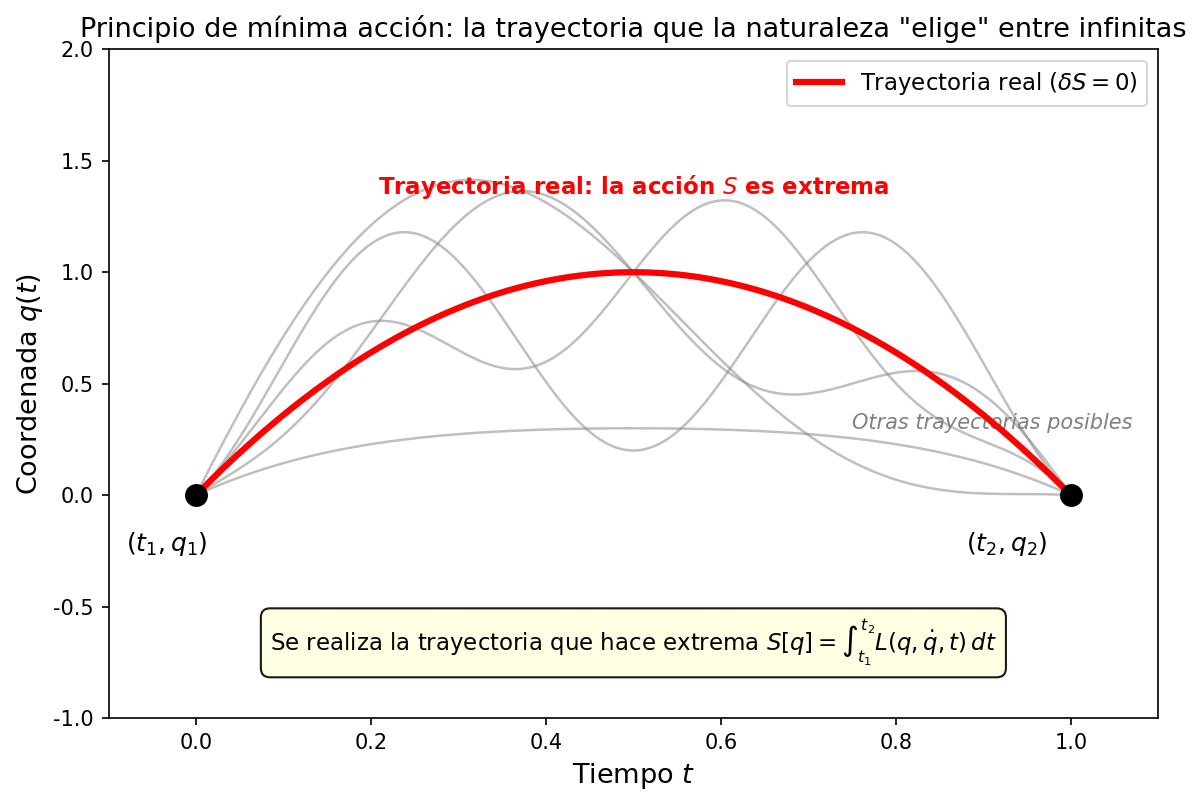
Fig. 1.12: Principio de mínima acción: selección de la trayectoria. Entre las innumerables trayectorias (gris) que conectan el punto inicial \((t_1, q_1)\) y el punto final \((t_2, q_2)\), la trayectoria que hace extremal la acción \(S = \int L\,dt\) (rojo) es la que se realiza físicamente.
🔵 Kai: ¿La acción?
Definición de la acción y el lagrangiano¶
🟡 Lina: La acción (action) \(S\) es la integral en el tiempo, desde el instante de partida \(t_1\) hasta el instante de llegada \(t_2\), de la diferencia entre la energía cinética \(T\) y la energía potencial \(V\), \(L = T - V\):
A \(L = T - V\) lo llamamos lagrangiano (Lagrangian). Aquí \(T\) es la energía cinética (función de la velocidad), \(V\) es la energía potencial (función de la posición) — lo mismo que \(V = mgh\) o \(V = \frac{1}{2}kx^2\) que aprendiste en el instituto. La notación con punto como \(\dot{x}\) es una abreviación para la derivada temporal: \(\dot{x} = dx/dt\) (velocidad), \(\ddot{x} = d^2x/dt^2\) (aceleración). Por ejemplo, para una partícula de masa \(m\), la energía cinética se escribe \(T = \frac{1}{2}mv^2 = \frac{1}{2}m\dot{x}^2\). Es una notación que se usa frecuentemente en física, así que recuérdala.
🔵 Kai: ¿La «diferencia» de energías y no la «suma»? ¿Por qué la diferencia?
🟡 Lina: Como el principio de mínima acción es en sí un axioma, no hay una razón profunda para «por qué \(T - V\)». Tampoco se puede explicar «por qué \(F = ma\) tiene esa forma». Ambos se justifican en el sentido de que «partiendo de este principio se obtienen resultados que concuerdan con los experimentos». ¿Qué pasaría si usáramos \(T + V\)? Después, en 「Recuperación de la ecuación de movimiento de Newton」, confirmaremos que de \(L = T - V\) sale \(m\ddot{x} = -dV/dx\), pero si pusiéramos \(L = T + V = \frac{1}{2}m\dot{x}^2 + V(x)\), entonces \(\partial L/\partial x = +dV/dx\) y la ecuación de Euler-Lagrange daría \(m\ddot{x} = +dV/dx\). Esto predice «aceleración hacia donde el potencial es más alto» — una pelota subiendo la pendiente. Solo con \(T - V\) se obtienen resultados que concuerdan con los experimentos.
⚪ Mei: Es decir, \(L = T - V\) es «un axioma que produce resultados que concuerdan con los experimentos», y no se pregunta el «por qué». La misma estructura que en el prólogo cuando dijimos «el punto de partida del modelo no es objeto de explicación».
Derivación de la ecuación de Euler-Lagrange¶
🟡 Lina: Derivemos la ecuación de movimiento a partir del principio de mínima acción. Este es el núcleo del cálculo de variaciones (calculus of variations).
¿Qué es el cálculo de variaciones? Es la técnica matemática para responder «de todas las trayectorias posibles, ¿cuál hace extremal la acción \(S\)?». La derivada ordinaria busca «extremos de funciones», pero el cálculo de variaciones busca «extremos de trayectorias (funciones en sí mismas)».
🟡 Lina: Antes de calcular concretamente, voy a organizar la notación de coordenadas. A partir de aquí usaré el término coordenadas generalizadas.
🔵 Kai: ¿«Coordenadas generalizadas»? ¿Son diferentes de las habituales \(x, y, z\)?
🟡 Lina: Buena pregunta. Las coordenadas generalizadas (generalized coordinates) son las variables elegidas para describir el estado del sistema. No se limitan a coordenadas cartesianas \(x, y, z\); se pueden elegir libremente según el problema. Por ejemplo, para un péndulo, el estado se determina con un solo ángulo \(\theta\), y para un péndulo doble con \(\theta_1, \theta_2\). La idea es «elegir tantas variables como grados de libertad tiene el sistema, las que se prefieran».
⚪ Mei: Es decir, \(x\) o \(y\) son casos especiales de coordenadas generalizadas, y lo que se hace es elegir la variable más natural según la simetría y las restricciones del problema.
🟡 Lina: Así es. La notación convencional usa \(q\). Si hay \(n\) grados de libertad se escriben \(q_1, q_2, \ldots, q_n\). Aquí, por simplicidad, trabajaremos con 1 grado de libertad \(q(t)\).
✅ Verificación de comprensión: ¿Qué son las coordenadas generalizadas? ¿Cuál es la diferencia con las coordenadas cartesianas \((x, y, z)\)?
Respuesta
Las coordenadas generalizadas son variables elegidas libremente según el problema para describir el estado del sistema. Las coordenadas cartesianas son un caso especial de coordenadas generalizadas; para un péndulo se puede elegir el ángulo \(\theta\), para un péndulo doble \(\theta_1, \theta_2\), eligiendo variables adecuadas a los grados de libertad y la simetría del sistema.
🔵 Kai: Pero antes escribíamos \(L = T - V\), ¿verdad? ¿Qué ha cambiado con \(L(q, \dot{q}, t)\)?
🟡 Lina: El contenido es el mismo. Por ejemplo, para un péndulo \(T = \frac{1}{2}m l^2 \dot{\theta}^2\), \(V = -mgl\cos\theta\), así que al escribir \(L = T - V\) explícitamente resulta una función de \(\theta\) y \(\dot{\theta}\). Es decir, \(L(q, \dot{q}, t)\) es la notación que expresa \(L = T - V\) en términos de la coordenada generalizada \(q\) y su derivada temporal \(\dot{q}\). La escritura enfatiza que «la forma concreta de \(T - V\) difiere de un problema a otro, pero en todos los casos se puede escribir en función de \(q\) y \(\dot{q}\) (y posiblemente del tiempo \(t\))».
🟡 Lina: Supongamos que se da el lagrangiano \(L(q, \dot{q}, t)\) en la coordenada generalizada \(q(t)\). Aquí \(\dot{q} = dq/dt\) es la velocidad. La acción es:
Aquí los corchetes en \(S[q]\) indican que \(S\) no depende de «un valor en un instante dado» sino de «la forma de toda la trayectoria \(q(t)\)». A este tipo de cantidad se la llama funcional (functional). En los capítulos siguientes aparecerá repetidamente la expresión «hacer extremal el funcional de acción», así que familiarízate con este término. Voy a organizar la diferencia entre una función ordinaria y un funcional. Una función ordinaria \(f(x)\) toma un número \(x\) como entrada y produce un número \(f\) como salida. Un funcional \(S[q]\) toma una función \(q(t)\) (la forma de la trayectoria) como entrada y produce un número \(S\) como salida — la diferencia está en si la entrada es «un número» o «una función».
🔵 Kai: Metes una función y sale un número... ¿como una «meta-función» de funciones?
🟡 Lina: Algo así. Veamos un ejemplo cotidiano para captar la intuición. «La longitud de una curva» es un funcional — incluso para dos curvas que conectan los mismos 2 puntos, si las conectas con una línea recta es corta, y si haces curvas es larga. Metes la forma de la curva (función) y sale la longitud (número). Ahora veamos un ejemplo concreto de la acción. Considera el caso de lanzar una pelota hacia arriba hasta una altura \(h\). Fijamos que parte del suelo en el instante \(t_1\) y llega a la altura \(h\) en el instante \(t_2\). Las trayectorias que conectan estos 2 puntos son infinitas — está la «trayectoria de aceleración uniforme hacia arriba» y también la «trayectoria que sube lentamente al principio y acelera al final» (esta última no se realiza físicamente, pero matemáticamente es una trayectoria virtual que se puede considerar). Como para cada trayectoria el patrón temporal de \(T\) y \(V\) es diferente, la integral temporal de \(L = T - V\) — es decir, la acción \(S\) — difiere según la trayectoria. Metes la forma de la trayectoria y sale un único número llamado acción — exactamente un funcional. Y el principio de mínima acción afirma que «la trayectoria que hace extremal (estacionaria) \(S\) es la que realmente se realiza». Después, en 「Ejemplo de caída libre en un campo gravitatorio」, confirmaremos que esa es el movimiento uniformemente acelerado (\(\ddot{y} = -g\)).
🔵 Kai: Un momento. \(\dot{q}\) es la derivada temporal de \(q\), ¿verdad? Pero en \(L(q, \dot{q}, t)\) se ponen \(q\) y \(\dot{q}\) como si fueran variables independientes. Las derivadas parciales \(\frac{\partial L}{\partial q}\) y \(\frac{\partial L}{\partial \dot{q}}\) significan fijar una y derivar respecto a la otra, ¿verdad? Si \(\dot{q}\) se determina a partir de \(q\), ¿se puede fijar?
🟡 Lina: Muy perspicaz. Este es el punto donde la gente tropieza por primera vez con la mecánica lagrangiana. La forma de pensarlo es así — \(L(q, \dot{q}, t)\) se define como «una función con dos ranuras de entrada independientes». Para un péndulo, primero se construye \(L(\theta, \omega) = \frac{1}{2}ml^2\omega^2 + mgl\cos\theta\) como «función de dos variables \(\theta\) y \(\omega\)». Las derivadas parciales se calculan en esta etapa. \(\frac{\partial L}{\partial \theta}\) es derivar respecto a \(\theta\) fijando \(\omega\), \(\frac{\partial L}{\partial \omega}\) es derivar respecto a \(\omega\) fijando \(\theta\).
⚪ Mei: Es decir, en la etapa de calcular las derivadas parciales, \(q\) y \(\dot{q}\) se tratan como «simplemente dos variables», y la relación «\(\dot{q}\) es la derivada temporal de \(q\)» se usa por primera vez dentro de la ecuación de Euler-Lagrange, después de haber calculado las derivadas parciales — es un proceso de dos etapas.
🟡 Lina: Exacto. El truco es separar «la etapa en que se determina la forma de la función» de «la etapa en que se aplica a la trayectoria real de movimiento».
✅ Verificación de comprensión: Al calcular la derivada parcial \(\partial L/\partial q\) de \(L(q, \dot{q}, t)\), ¿por qué se puede tratar \(\dot{q}\) como «fija» a pesar de ser la derivada temporal de \(q\)?
Respuesta
\(L\) se define primero como «una función con dos ranuras de entrada independientes \(q\) y \(\dot{q}\)», y las derivadas parciales se calculan en esta etapa. La relación «\(\dot{q}\) es la derivada temporal de \(q\)» se usa por primera vez dentro de la ecuación de Euler-Lagrange, después de haber calculado las derivadas parciales.
🟡 Lina: Consideremos una trayectoria \(q(t) + \delta q(t)\) ligeramente desplazada de la trayectoria real \(q(t)\). Mira Fig. 1.13「Imagen de la variación \(\delta q(t)\)」.
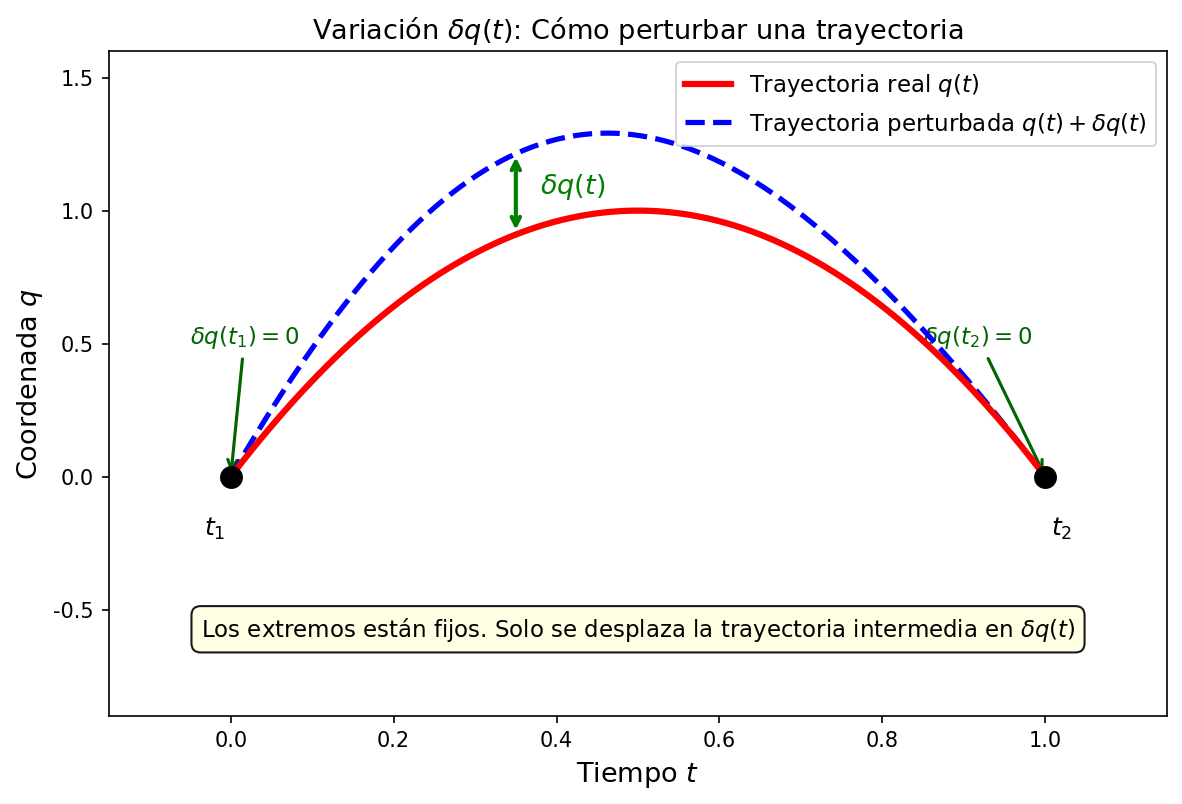
Fig. 1.13: Imagen de la variación \(\delta q(t)\). La línea roja continua es la trayectoria real \(q(t)\), la línea azul discontinua es la trayectoria perturbada \(q(t) + \delta q(t)\). Los extremos están fijos (\(\delta q(t_1) = \delta q(t_2) = 0\)), y solo la trayectoria intermedia se desplaza en \(\delta q(t)\).
🔵 Kai: El \(\delta\) de \(\delta q\), ¿es diferente del \(d\) de la derivada ordinaria?
🟡 Lina: Buena pregunta. \(dq\) es «el cambio de \(q\) cuando se desplaza ligeramente el tiempo sobre la misma trayectoria». \(\delta q\) es «el cambio cuando, en el mismo instante, se desplaza la trayectoria misma a otra trayectoria». Es decir, \(d\) es un desplazamiento en la dirección temporal, \(\delta\) es un desplazamiento en la dirección del espacio de trayectorias.
⚪ Mei: Fijando el instante \(t\), «si hubiera seguido otra trayectoria, ¿cuánto habría diferido \(q\)?» es \(\delta q(t)\).
🟡 Lina: Así es. Y fijamos los extremos — no cambiamos el punto de partida ni el de llegada:
🔵 Kai: No se cambian el punto de partida ni el de llegada, solo se varía un poco la trayectoria intermedia.
🟡 Lina: Exacto. Ahora calculemos cuánto cambia la acción \(S\) cuando la trayectoria se desplaza \(q \to q + \delta q\). A esta cantidad de cambio \(\delta S\) la llamamos variación. Se lee «delta \(S\)».
🔵 Kai: ¿Cómo se calcula \(\delta S\)?
🟡 Lina: \(L(q, \dot{q}, t)\) era una función de dos variables \(q\) y \(\dot{q}\), ¿verdad? Cuando la trayectoria se desplaza \(q \to q + \delta q\), la velocidad también cambia. La velocidad de la nueva trayectoria es \(\frac{d}{dt}(q + \delta q) = \dot{q} + \frac{d}{dt}(\delta q)\), así que el desplazamiento de la velocidad es:
Es decir, «la velocidad de la trayectoria desplazada» menos «la velocidad de la trayectoria original». Solo hemos usado la linealidad de la derivada (\((f+g)' = f' + g'\)).
⚪ Mei: «La tasa de cambio temporal del desplazamiento \(\delta q\)» es \(\delta\dot{q}\). Si la forma de desplazar varía con el tiempo, el desplazamiento de la velocidad también varía con el tiempo.
🟡 Lina: Así es. Calculemos ahora la variación de la acción. La acción después del desplazamiento es \(S[q + \delta q] = \int_{t_1}^{t_2} L(q + \delta q,\, \dot{q} + \delta\dot{q},\, t)\, dt\). La variación es:
🟡 Lina: Aquí, como \(\delta q\) es «solo un pequeño» desplazamiento, usamos la versión de dos variables de la aproximación que aprendiste en el instituto para una variable \(f(x + \Delta x) \approx f(x) + f'(x)\,\Delta x\). En el caso de una variable era «aproximar por la tangente». En el caso de dos variables es la misma idea — en una variable era «aproximar por la tangente», en dos variables es «aproximar por el plano tangente». El gráfico de una función de dos variables \(f(a, b)\) es una superficie en el espacio tridimensional (ejes \(a\), \(b\), \(f\)). La superficie plana que se ajusta perfectamente a esa superficie es el plano tangente. Para una función de dos variables \(f(a, b)\) cuando \(a \to a + \Delta a\), \(b \to b + \Delta b\):
Esta es una aproximación hasta primer orden (primera potencia) en \(\Delta a\), \(\Delta b\). Los términos de segundo orden y superiores como \(\Delta a \cdot \Delta b\) o \((\Delta a)^2\) se pueden despreciar cuando los desplazamientos son suficientemente pequeños. Por ejemplo, si \(\Delta a = 0.01\) entonces \((\Delta a)^2 = 0.0001\), que es 100 veces menor que \(\Delta a\) mismo — cuanto más pequeños hagamos los desplazamientos, más rápidamente decrecen los términos de segundo orden y superiores comparados con los de primer orden. En el cálculo de variaciones consideramos el límite en que \(\delta q\) se hace cada vez más pequeño, así que los términos de segundo orden y superiores son despreciables frente a los de primer orden, y solo los términos de primer orden determinan la condición de estacionariedad. Esto es exactamente la misma idea que cuando en el instituto usabas «\(f(x+\Delta x) \approx f(x) + f'(x)\Delta x\)» para encontrar la condición de extremo \(f'(x) = 0\).
🔵 Kai: Se suma «pendiente × desplazamiento» en la dirección de cada variable. Como una extensión a 2 direcciones de \(f'(x)\,\Delta x\) del caso de una variable.
🟡 Lina: Veamos por qué basta con sumar. Primero fijamos \(b\) y movemos solo \(a\): por la aproximación de una variable \(f(a + \Delta a, b) \approx f(a, b) + \frac{\partial f}{\partial a}\Delta a\). Luego desde ese estado movemos \(b\): \(f(a + \Delta a, b + \Delta b) \approx f(a + \Delta a, b) + \frac{\partial f}{\partial b}\Delta b\). Combinando ambas: \(f(a, b) + \frac{\partial f}{\partial a}\Delta a + \frac{\partial f}{\partial b}\Delta b\). (En el segundo paso, el punto donde se evalúa la derivada parcial se desvía ligeramente a \((a + \Delta a, b)\) en vez de \((a, b)\), pero el efecto de esa desviación en el resultado es solo un término de segundo orden \(\Delta a \cdot \Delta b\), que en la aproximación de primer orden es despreciable.) El resultado es el mismo si se invierte el orden. Si quieres verificar con un ejemplo concreto, mira Problema B-8. Cálculos básicos de derivadas parciales.
🔵 Kai: Pero «los de segundo orden son despreciables», ¿realmente se pueden despreciar? ¿No habrá algo como «infinitamente pequeño pero no cero»?
🟡 Lina: Buena pregunta. En el instituto aprendiste que «la condición de extremo es \(f'(x) = 0\)», ¿verdad? Eso significaba «como \(f(x + \Delta x) - f(x) \approx f'(x)\,\Delta x\), si la variación de primer orden es cero, el valor no cambia (a nivel de primer orden) en cualquier dirección que desplaces». El término de segundo orden \(\frac{1}{2}f''(x)(\Delta x)^2\) se usa para juzgar si es máximo o mínimo, pero para determinar la posición del extremo basta con la condición de primer orden. En el cálculo de variaciones es exactamente igual. Expandemos \(\delta S\) en potencias de \(\delta q\) y extraemos solo el término de primer orden. «Que el término de primer orden en \(\delta q\) sea cero» es la condición de estacionariedad, y solo con eso se determina la ecuación de movimiento. Los términos de segundo orden y superiores son \(\delta q\) veces más pequeños que los de primer orden cuando \(\delta q\) es pequeño, así que no afectan a la determinación de la posición del punto estacionario. Tiene la misma estructura que cuando en el instituto escribías \(\lim_{\Delta x \to 0} \frac{f(x+\Delta x) - f(x) - f'(x)\Delta x}{\Delta x} = 0\) — el «resto» en el numerador tiende a cero más rápido que \(\Delta x\), así que al dividir por \(\Delta x\) sigue dando cero.
🔵 Kai: Ah, es la misma idea que la definición de derivada. «Lo que determina la posición del extremo es la condición de primer orden» — y eso se está haciendo no para funciones sino para trayectorias.
🟡 Lina: Así es. Aplicándolo a \(L\):
Restando el \(L\) original:
⚪ Mei: El primer término es «pendiente en la dirección \(q\) × desplazamiento de \(q\)», el segundo es «pendiente en la dirección \(\dot{q}\) × desplazamiento de \(\dot{q}\)». Se separan limpiamente.
🟡 Lina: Aquí hay un problema. En el segundo término aparece \(\delta\dot{q} = \frac{d}{dt}(\delta q)\). Queremos llegar a una expresión solo en términos de «\(\delta q\)», pero está mezclada la derivada temporal de \(\delta q\). Necesitamos resolver esto.
🔵 Kai: ¿Cómo se hace?
🟡 Lina: Aquí usamos la integración por partes. ¿Recuerdas la fórmula de la derivada de un producto de matemáticas III del instituto?
🔵 Kai: \((fg)' = f'g + fg'\), ¿verdad?
🟡 Lina: Despejando: \(fg' = (fg)' - f'g\). Integrando ambos lados de \(t_1\) a \(t_2\):
Esta es la fórmula de integración por partes. La operación de «pasar la integral de \(g'\) a \(g\), y a cambio derivar \(f\)».
🟡 Lina: Apliquémoslo a nuestro problema. En la fórmula de integración por partes \(\int f\,g'\,dt = [fg] - \int f'\,g\,dt\), ponemos \(f = \frac{\partial L}{\partial \dot{q}}\), \(g = \delta q\) (por tanto \(g' = \frac{d(\delta q)}{dt}\), \(f' = \frac{d}{dt}\frac{\partial L}{\partial \dot{q}}\)):
🔵 Kai: ¡En el lado izquierdo estaba «la derivada de \(\delta q\)», y en el lado derecho ha pasado a ser «\(\delta q\) directamente»! A cambio es \(\frac{\partial L}{\partial \dot{q}}\) la que se ha derivado.
🟡 Lina: Así es. Le hemos «pasado» la derivada al otro factor. Y ahora mira el primer término del lado derecho — el término de frontera. Como \(\delta q(t_1) = 0\) y \(\delta q(t_2) = 0\) (extremos fijos):
⚪ Mei: Gracias a haber fijado los extremos, el término de frontera se anula limpiamente.
🟡 Lina: Con esto el segundo término está organizado. Sustituyendo en \(\delta S\) original:
🔵 Kai: ¡Ah, se ha factorizado \(\delta q\)! El integrando tiene la forma «(algo) \(\times\,\delta q\)». Pero una vez factorizado, ¿qué podemos decir? ¿Por qué queríamos esta forma?
🟡 Lina: Buena pregunta. El principio de mínima acción exige «\(\delta S = 0\)» — como dijimos antes, es la condición de estacionariedad (la variación de primer orden es cero). Es decir:
Además, esto debe cumplirse para cualquier desplazamiento \(\delta q(t)\) que elijamos.
🔵 Kai: «Para cualquier \(\delta q\)»... ¿por qué eso implica que lo que está dentro del paréntesis es cero?
🟡 Lina: Piénsalo por reducción al absurdo. Supón que el contenido del paréntesis no fuera cero en cierto instante \(t^*\) — supón que es positivo. Como es una función continua, también será positivo cerca de \(t^*\). Entonces, ¿qué pasa si eliges un \(\delta q\) que sea positivo solo cerca de \(t^*\) y cero en el resto?
🔵 Kai: Ah, positivo × positivo = positivo, así que la integral en esa parte es positiva. El resto es cero, así que el total no es cero... ¡se contradice!
🟡 Lina: Así es. Se obtendría \(\delta S \neq 0\), contradiciendo «\(\delta S = 0\) para todo \(\delta q\)». Por tanto el contenido del paréntesis debe ser cero en todos los instantes:
🔵 Kai: ...Pero profesora, mirando solo esta ecuación no veo en absoluto que sea lo mismo que \(F = ma\). ¿Qué representa \(\frac{d}{dt}\frac{\partial L}{\partial \dot{q}}\)?
🟡 Lina: Esta es la ecuación de Euler-Lagrange. Parece totalmente diferente de \(F = ma\), ¿verdad? Pero ahora voy a sustituir un \(L\) concreto y reproducir el mismo resultado, y entonces verás el significado de cada término.
🟡 Lina: Por cierto, en el caso de múltiples grados de libertad (coordenadas \(q_1, q_2, \ldots, q_n\)), para cada coordenada \(q_i\) se cumple independientemente la misma forma de ecuación:
Pero primero confirmemos que con 1 grado de libertad se obtiene \(F = ma\).
✅ Verificación de comprensión: ¿Cuál es la diferencia entre la variación \(\delta q(t)\) y la diferencial ordinaria \(dq\)?
Respuesta
\(dq\) es el cambio de \(q\) cuando se desplaza ligeramente el tiempo sobre la misma trayectoria. \(\delta q\) es el cambio cuando, en el mismo instante, se desplaza la trayectoria misma a otra trayectoria. Se impone \(\delta q(t_1) = \delta q(t_2) = 0\) (extremos fijos).
✅ Verificación de comprensión: ¿Cuál es el propósito de usar la integración por partes en la derivación de la ecuación de Euler-Lagrange?
Respuesta
Eliminar \(\delta\dot{q}\) (la derivada temporal de \(\delta q\)) que aparece en el integrando y organizar todo en la forma «(algo) \(\times \delta q\)». Mediante la integración por partes se pasa la derivada al factor \(\partial L/\partial \dot{q}\), y la condición de extremos fijos elimina el término de frontera.
Recuperación de la ecuación de movimiento de Newton¶
🟡 Lina: Ahora confirmemos que la ecuación de Euler-Lagrange reproduce el \(F = ma\) de Newton. Para una partícula de masa \(m\) moviéndose en una dimensión en un potencial \(V(x)\):
🟡 Lina: Calculemos cada término de la ecuación de Euler-Lagrange. Primero la derivada parcial respecto a \(\dot{x}\):
Esto no es otra cosa que el momento \(p = m\dot{x}\). Luego la derivada temporal:
Y la derivada parcial respecto a \(x\):
🔵 Kai: \(\frac{\partial L}{\partial \dot{x}}\) es el momento, y \(\frac{d}{dt}\frac{\partial L}{\partial \dot{x}}\) es masa × aceleración — ¡así que el lado izquierdo de la ecuación de Euler-Lagrange es la parte «\(ma\)»!
🟡 Lina: Sustituyendo en la ecuación de Euler-Lagrange:
Reordenando:
🔵 Kai: El lado derecho \(-dV/dx\)... ah, antes con la gravedad aprendimos \(\mathbf{g} = -\nabla\Phi\), ¿verdad? Con la misma estructura de que «la fuerza es la pendiente del potencial», ¿\(-dV/dx\) es la fuerza \(F\)?
🟡 Lina: Exactamente. \(F = -dV/dx\) es la relación general de que «la fuerza actúa en la dirección donde la energía potencial disminuye». El \(\mathbf{g} = -\nabla\Phi\) de la gravedad era un caso particular. Es decir, \(m\ddot{x} = F\) — la ecuación de movimiento de Newton \(F = ma\) ha sido derivada del principio de mínima acción.
⚪ Mei: El punto de partida es completamente diferente — «contemplar toda la trayectoria y hacer extremal la acción» — pero la ecuación a la que llegamos es la misma \(F = ma\). Se confirma que las dos formulaciones describen la misma física.
✅ Verificación de comprensión: Cuando \(L = \frac{1}{2}m\dot{x}^2 - V(x)\), ¿qué representa físicamente \(\partial L/\partial \dot{x}\)?
Respuesta
El momento \(p = m\dot{x}\). Derivar parcialmente el lagrangiano respecto a la velocidad \(\dot{x}\) da el momento. En general, \(\partial L/\partial \dot{q}\) se define como el momento generalizado (también llamado momento canónico). En este caso coincide con el momento ordinario \(m\dot{x}\).
🔵 Kai: Pero profesora, antes dijiste «fijamos el punto inicial y el final», ¿verdad? Si no se puede usar sin conocer el punto final, ¿no se puede predecir el futuro?
🟡 Lina: Buena duda. En realidad «fijar el punto inicial y el final» es una técnica matemática para derivar la ecuación de Euler-Lagrange, no significa que «físicamente no se pueda usar sin conocer el punto final».
🔵 Kai: ¿Qué quieres decir?
🟡 Lina: El papel del principio de mínima acción es ser un «aparato para derivar la ecuación de movimiento correcta». La ecuación de Euler-Lagrange que sale de ahí es una ecuación diferencial universal independiente de las condiciones de frontera. Cuando realmente quieres predecir el futuro, le das a esta ecuación «la posición inicial \(q(t_1)\) y la velocidad inicial \(\dot{q}(t_1)\)» y la resuelves — exactamente igual que dar condiciones iniciales a \(F = ma\) y resolver.
⚪ Mei: Es decir, el principio de mínima acción es «el principio para encontrar la ecuación correcta», y la predicción la ejecuta la ecuación de Euler-Lagrange que sale de ahí. «Fijar punto inicial y final» es el andamiaje para derivar la ecuación; una vez derivada, se puede retirar.
Ejemplo de caída libre en un campo gravitatorio¶
🟡 Lina: Hagamos otro ejemplo concreto. Caída libre con el eje \(y\) positivo hacia arriba. La energía potencial a la altura \(y\) es \(V = mgy\):
Ecuación de Euler-Lagrange:
Sustituyendo en la ecuación de Euler-Lagrange \(\frac{d}{dt}\frac{\partial L}{\partial \dot{y}} - \frac{\partial L}{\partial y} = 0\):
⚪ Mei: Sale el movimiento uniformemente acelerado \(\ddot{y} = -g\). La ley de caída de los cuerpos de Galileo.
Por qué el principio de mínima acción es importante¶
🔵 Kai: Pero profesora, si sale la misma respuesta, ¿para qué molestarse con una formulación diferente?
🟡 Lina: Hay 3 razones.
🟡 Lina: Primera, las simetrías se ven fácilmente. Si el lagrangiano no depende del tiempo, la energía se conserva; si no depende del espacio, el momento se conserva — estas «relaciones entre simetría y cantidad conservada» surgen automáticamente (teorema de Noether, que reaparece como Cap. 15 relación entre vectores de Killing y cantidades conservadas).
🔵 Kai: «El lagrangiano no depende del tiempo», ¿qué significa concretamente?
🟡 Lina: Por ejemplo, mira el \(L = \frac{1}{2}m\dot{y}^2 - mgy\) de la caída libre. Como \(g\) es una constante, el tiempo \(t\) no aparece directamente en la expresión de \(L\) — «la misma forma sin importar cuándo hagas el experimento». Por supuesto \(y\) y \(\dot{y}\) cambian con el tiempo, pero eso es «cambio a lo largo de la trayectoria», y la forma funcional de \(L\) misma no depende de \(t\). En este caso escribimos \(\partial L/\partial t = 0\). Esto significa «si derivas respecto a la tercera ranura de entrada \(t\) de \(L(q, \dot{q}, t)\), da cero» — la misma idea de antes de tratar \(q\) y \(\dot{q}\) como variables independientes, aquí se fijan \(q\) y \(\dot{q}\) y se deriva respecto a \(t\). Como la expresión de \(L\) no contiene \(t\) explícitamente, es naturalmente cero. Se dice que «hay simetría de traslación temporal». La energía que se conserva en este caso es \(T + V = \frac{1}{2}m\dot{y}^2 + mgy\) — el lagrangiano es \(T - V\), pero la cantidad conservada que emerge es \(T + V\) (la energía total). Aunque la velocidad aumente durante la caída, la altura disminuye en la misma proporción, así que la suma permanece constante. Por qué \(\partial L/\partial t = 0\) implica esto se demuestra en Cap. 15 vectores de Killing y cantidades conservadas, pero por ahora recuerda que «existe un teorema así de poderoso».
🔵 Kai: ¿Qué es la simetría? Es una palabra que se oye mucho, pero ¿qué significa en física?
🟡 Lina: En una palabra, «que las leyes físicas (la forma del lagrangiano) no cambian bajo cierta operación». Lo resumo.
Simetría — «cambiar sin que cambie»
En física, «tener simetría» significa que las leyes físicas no cambian bajo cierta operación.
Operación Nombre de la simetría Cantidad conservada resultante Desplazar el lugar del experimento Simetría de traslación espacial Momento Desplazar el instante del experimento Simetría de traslación temporal Energía Rotar el aparato experimental Simetría rotacional Momento angular «Por cada simetría que existe, aparece una cantidad conservada» — este es el teorema de Noether. Reaparece como Cap. 15 relación entre vectores de Killing y cantidades conservadas, y la Teoría Cuántica de Campos Cap. 3 demostración general se trata allí.
Nota: La simetría no es «algo que la naturaleza debe poseer necesariamente». Se verifica en la forma de «si asumimos esta simetría, se obtienen resultados que concuerdan con los experimentos» — es parte de la hipótesis.
🔵 Kai: Ya veo. Entonces en el ejemplo de la caída libre, «que el experimento dé lo mismo en Madrid que en Barcelona, \(\ddot{y} = -g\)» sería la simetría de traslación espacial... ¿verdad? Pero en la tabla dice que «el momento se conserva», y en la caída libre, ¿se conserva el momento? La velocidad cambia al caer, ¿no?
🟡 Lina: Buena duda. Déjame organizar un poco. La intuición de Kai de que «las mismas leyes en Madrid que en Barcelona» es correcta, y eso es efectivamente un tipo de simetría. Pero lo que dice el teorema de Noether «simetría → cantidad conservada» es algo más concreto. El punto es: «si el lagrangiano no depende de cierta coordenada, el momento en esa dirección se conserva». En la caída libre unidimensional \(L = \frac{1}{2}m\dot{y}^2 - mgy\), \(y\) aparece en \(L\), así que el momento en la dirección \(y\) no se conserva — tal como intuye Kai. Pero piensa en el caso de lanzar una pelota en diagonal. Si incluyes tanto la dirección horizontal \(x\) como la vertical \(y\), se escribe \(L = \frac{1}{2}m(\dot{x}^2 + \dot{y}^2) - mgy\) (solo se ha añadido la contribución \(\frac{1}{2}m\dot{x}^2\) a la energía cinética en la dirección \(x\)). Mirando esta expresión, \(x\) (dirección horizontal) no aparece explícitamente en \(L\). Es decir, \(x \to x + \text{constante}\) no cambia \(L\) — esta es la «simetría de traslación espacial horizontal». Según el teorema de Noether, la cantidad conservada correspondiente a esta simetría es el momento horizontal \(m\dot{x}\). Que la velocidad horizontal de la pelota lanzada sea constante es precisamente esto. En cambio, en la dirección vertical hay el término \(mgy\), así que no hay simetría de traslación en la dirección \(y\), y el momento vertical no se conserva (se acelera por la gravedad).
🔵 Kai: Ah, ya veo. «Las mismas leyes al cambiar de lugar» como concepto general y «el lagrangiano no contiene \(x\), así que el momento en la dirección \(x\) se conserva» como afirmación concreta son de niveles diferentes. La segunda es mucho más concreta y te dice incluso en qué dirección hay cantidad conservada.
🟡 Lina: Exacto. El teorema de Noether conecta uno a uno «qué simetría corresponde a qué cantidad conservada». Por eso es tan poderoso.
🟡 Lina: Segunda, no depende del sistema de coordenadas. Si escribes \(F = ma\) en componentes, en coordenadas polares aparecen términos aparentes como la fuerza centrífuga y la fuerza de Coriolis y la forma de la ecuación cambia. Pero la ecuación de Euler-Lagrange mantiene la misma forma \(\frac{d}{dt}\frac{\partial L}{\partial \dot{q}_i} - \frac{\partial L}{\partial q_i} = 0\) en cualquier sistema de coordenadas. A partir de Cap. 2, donde se aprende la relatividad general, una descripción independiente del sistema de coordenadas es esencialmente importante.
⚪ Mei: Que la «forma» de la ecuación no cambie al cambiar de coordenadas será esencialmente relevante cuando tratemos la libertad de coordenadas en la relatividad general que viene.
🟡 Lina: Tercera, la extensión a la teoría de campos es natural. Si se extiende el lagrangiano de partículas \(L(q, \dot{q})\) a una cantidad llamada «densidad lagrangiana del campo», las ecuaciones de movimiento del campo se derivan con el mismo marco. Los símbolos y detalles se tratan en Apéndice C teoría de campos, pero lo importante es que el procedimiento «escribir el lagrangiano y hacer extremal la acción» es exactamente el mismo. Tanto la Cap. 14 ecuación de Einstein como la Cap. 24 variación de la acción de Einstein-Hilbert se apoyan en este principio.
🔵 Kai: Entonces, ¿en electromagnetismo y en relatividad general también se escribe un lagrangiano y se obtiene la ecuación con el mismo procedimiento? ¿Física totalmente diferente pero se puede usar el mismo método? Pero, ¿por qué la naturaleza siempre se puede describir con la forma de «hacer extremal la acción»? ¿No es eso en sí mismo misterioso?
🟡 Lina: Es una pregunta profunda. Siendo honestos, no se conoce la respuesta última a «por qué se cumple el principio de mínima acción». Sin embargo, todos los modelos fundamentales de la física se pueden formular escribiendo un lagrangiano y haciendo extremal la acción — y los resultados concuerdan con los experimentos. \(F = ma\) es exclusivo de la mecánica de Newton, pero el principio de mínima acción se puede usar como «lenguaje común» en todos los campos. Esta es la herramienta que usaremos de aquí en adelante.
✅ Verificación de comprensión: De las 3 razones mencionadas en el texto por las que el principio de mínima acción es superior a \(F = ma\), enuncia una.
Respuesta
(Cualquiera de las siguientes) (1) Las relaciones entre simetría y cantidades conservadas se ven automáticamente. (2) No depende del sistema de coordenadas. (3) La extensión a la teoría de campos se hace de forma natural.
✅ Verificación de comprensión: Según el teorema de Noether, cuando el lagrangiano no depende explícitamente del tiempo (\(\partial L/\partial t = 0\)), ¿qué se conserva?
Respuesta
Se conserva la energía. Es la cantidad conservada correspondiente a la «simetría de traslación temporal» (las leyes físicas son las mismas sin importar cuándo se haga el experimento).
¿Cómo se encuentra el lagrangiano?¶
🔵 Kai: Pero profesora, ¿cómo se encuentra el lagrangiano? ¿Alguien decidió «sea \(L = T - V\)»?
🟡 Lina: Buena pregunta. Hay dos formas principales de encontrar el lagrangiano. Primera, restringirlo a partir de simetrías. Si se exige que «este sistema debe tener tales simetrías», la forma del lagrangiano se restringe considerablemente. Segunda, comparar con los experimentos. Se deriva la ecuación de movimiento del lagrangiano candidato y se compara con los resultados experimentales. Si no concuerda, se modifica el lagrangiano.
⚪ Mei: Es decir, el lagrangiano mismo es una «hipótesis».
🟡 Lina: Exactamente. El trabajo del físico podría resumirse como «encontrar el lagrangiano correcto». En la mecánica de Newton \(L = T - V\), en electromagnetismo tiene otra forma, en la relatividad general se usa la acción de Einstein-Hilbert con la curvatura escalar \(R\). Las formas son diferentes pero el marco «escribir el lagrangiano y hacer extremal la acción» es común a todas.
✅ Verificación de comprensión: ¿Cómo se define la acción \(S\)? ¿Qué es el lagrangiano \(L\)?
Respuesta
\(S = \int_{t_1}^{t_2} L\, dt\). El lagrangiano es \(L = T - V\) (la diferencia entre la energía cinética y la energía potencial).
✅ Verificación de comprensión: Escribe la ecuación de Euler-Lagrange y confirma que de \(L = \frac{1}{2}m\dot{x}^2 - V(x)\) se obtiene la ecuación de movimiento de Newton.
Respuesta
Ecuación de Euler-Lagrange: \(\frac{d}{dt}\frac{\partial L}{\partial \dot{q}} - \frac{\partial L}{\partial q} = 0\). Sustituyendo \(L = \frac{1}{2}m\dot{x}^2 - V(x)\) se obtiene \(m\ddot{x} = -dV/dx\), es decir \(F = ma\).
1.8 Resumen de este capítulo¶
🟡 Lina: Organicemos el contenido de hoy.
- Reescribimos la gravitación universal de Newton \(F = Gm_1m_2/r^2\) como «teoría de campo» usando el campo gravitatorio \(\mathbf{g} = -\nabla\Phi\) y el potencial gravitatorio \(\Phi\)
- La ecuación de campo que determina el potencial es la ecuación de Poisson \(\nabla^2\Phi = 4\pi G\rho\)
- Caso de éxito: el descubrimiento de Neptuno — la predicción cuantitativa del modelo de Newton fue brillantemente confirmada
- Limitación ①: la precesión del perihelio de Mercurio — la predicción del modelo de Newton se desvía de la observación en unos 43 segundos de arco por siglo
- Limitación ②: la ecuación de Poisson no tiene derivada temporal, y los cambios de la gravedad se propagan instantáneamente — en contradicción con la relatividad especial
- Principio de mínima acción — definimos el lagrangiano \(L = T - V\) y la acción \(S = \int L\,dt\), y de la condición de estacionariedad de la acción \(\delta S = 0\) (no necesariamente «mínima» pero históricamente así se llama) derivamos la ecuación de Euler-Lagrange \(\frac{d}{dt}\frac{\partial L}{\partial \dot{q}} - \frac{\partial L}{\partial q} = 0\). Reprodujimos el \(F = ma\) de Newton. Este marco se usa repetidamente en la Cap. 8 ecuación geodésica, la Cap. 14 ecuación de Einstein y la Apéndice C teoría de campos
🔵 Kai: El modelo de Newton no está «equivocado», sino que es «una aproximación de un modelo más preciso».
🟡 Lina: Exacto. Es la primera vez que vemos un ejemplo concreto de lo que dijimos en el prólogo: «los modelos son hipótesis».
Adelanto del próximo capítulo¶
En Cap. 2 Mapa del viaje — visión global de tensores y ecuación de Einstein, desplegaremos el mapa de diseño completo necesario para superar las limitaciones del modelo de Newton. Introduciremos los tensores como herramienta para escribir modelos físicos de forma independiente del sistema de coordenadas, y contemplaremos cómo el modelo gravitatorio de Einstein se compone de dos pilares: «la ecuación geodésica que determina el movimiento de las partículas» y «la ecuación de Einstein que determina la forma del espaciotiempo». Las derivaciones concretas con ecuaciones avanzarán paso a paso a partir de Cap. 3, pero primero captar «hacia dónde nos dirigimos».
Referencias¶
- Hartle, J. B. (2003). Gravity: An Introduction to Einstein's General Relativity. Addison-Wesley. Ch. 1, Ch. 3.
- Tong, D. (2019). General Relativity. University of Cambridge Part II Mathematical Tripos. Ch. 1. http://www.damtp.cam.ac.uk/user/tong/gr.html
- 石井俊全 (2013).『一般相対性理論を一歩一歩数式で理解する』ベレ出版. 第 2 章「物理の準備」.
Feedback on this page
Let us know if something was unclear, incorrect, or could be improved.