Apéndice A Soluciones¶
← Volver a ejercicios | Volver al capítulo
Índice
Básico
- B-1. Cálculo por componentes del producto vectorial
- B-2. Ortogonalidad del producto vectorial
- B-3. Producto triple escalar
- B-4. Gradiente de un campo escalar
- B-5. Divergencia de un campo vectorial
- B-6. Rotacional de un campo vectorial
- B-7. Laplaciano de un campo escalar
- B-8. Verificación de la identidad de Lagrange
- B-9. Verificación de la fórmula BAC-CAB
- B-10. Verificación de rot(grad) = 0
Intermedio
- M-1. Demostración de la fórmula BAC-CAB
- M-2. Demostración de div(rot) = 0
- M-3. Fórmula del producto escalar entre productos vectoriales
- M-4. Fórmula de la divergencia de un producto
- M-5. Teorema de Gauss y campo de Coulomb
Avanzado
Básico¶
B-1. Cálculo por componentes del producto vectorial¶
Problema:
Calcula componente a componente, siguiendo la definición, el producto vectorial \(\boldsymbol{a} \times \boldsymbol{b}\) de los vectores \(\boldsymbol{a} = (2,\, 1,\, -1)\) y \(\boldsymbol{b} = (0,\, 3,\, 2)\).
Estrategia de resolución: Se expande el determinante formal por cofactores a lo largo de la primera fila.
Cálculo:
Verificación: Por la propiedad anticonmutativa, \(\boldsymbol{b} \times \boldsymbol{a} = (-5, 4, -6)\). En efecto, \((\boldsymbol{b} \times \boldsymbol{a})_x = 3 \cdot (-1) - 2 \cdot 1 = -5\) ✓
B-2. Ortogonalidad del producto vectorial¶
Problema:
Verifica que el \(\boldsymbol{a} \times \boldsymbol{b}\) obtenido en el problema A.1 es ortogonal a \(\boldsymbol{a}\), calculando el producto escalar \((\boldsymbol{a} \times \boldsymbol{b}) \cdot \boldsymbol{a}\).
Cálculo:
Verificación: Comprobamos también el producto escalar con \(\boldsymbol{b}\): \(5 \cdot 0 + (-4) \cdot 3 + 6 \cdot 2 = 0 - 12 + 12 = 0\) ✓
B-3. Producto triple escalar¶
Problema:
Calcula el producto triple escalar \(\boldsymbol{a} \cdot (\boldsymbol{b} \times \boldsymbol{c})\) de los vectores \(\boldsymbol{a} = (1,\, 0,\, 2)\), \(\boldsymbol{b} = (3,\, 1,\, 0)\), \(\boldsymbol{c} = (0,\, -1,\, 1)\) como un determinante \(3 \times 3\).
Cálculo:
Expansión por cofactores a lo largo de la primera fila:
Verificación (método de Sarrus):
Suma de las diagonales descendentes hacia la derecha: \(a_{11}a_{22}a_{33} + a_{12}a_{23}a_{31} + a_{13}a_{21}a_{32} = 1 \cdot 1 \cdot 1 + 0 \cdot 0 \cdot 0 + 2 \cdot 3 \cdot (-1) = 1 + 0 - 6 = -5\)
Suma de las diagonales descendentes hacia la izquierda: \(a_{13}a_{22}a_{31} + a_{12}a_{21}a_{33} + a_{11}a_{23}a_{32} = 2 \cdot 1 \cdot 0 + 0 \cdot 3 \cdot 1 + 1 \cdot 0 \cdot (-1) = 0 + 0 + 0 = 0\)
Determinante \(= -5 - 0 = -5\) ✓
B-4. Gradiente de un campo escalar¶
Problema:
Determina el gradiente \(\nabla\varphi\) del campo escalar \(\varphi(x, y, z) = x^2 y + y^2 z + z^2 x\).
Cálculo:
Verificación: Se comprueban las dimensiones de cada término (derivadas parciales de cada monomio de \(\varphi\) respecto a las variables). \(\partial(x^2 y)/\partial x = 2xy\) ✓, \(\partial(y^2 z)/\partial x = 0\) ✓, \(\partial(z^2 x)/\partial x = z^2\) ✓. Las demás componentes se verifican de manera análoga.
B-5. Divergencia de un campo vectorial¶
Problema:
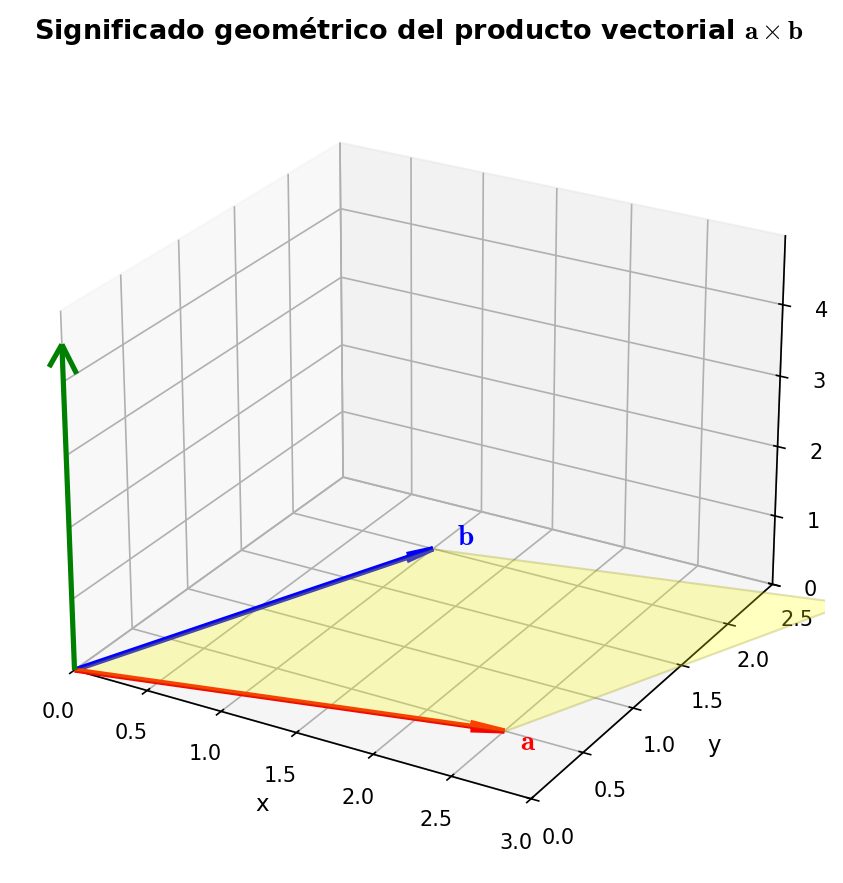
Figura de referencia: Figura A.1: Producto vectorial (Apéndice A)
{kind=link}
Calcula la divergencia \(\nabla \cdot \boldsymbol{F}\) del campo vectorial \(\boldsymbol{F} = (x^2 y,\; y^2 z,\; z^2 x)\).
Cálculo:
Verificación: Comprobamos cada derivada parcial individualmente. \(\partial(x^2 y)/\partial x = 2xy\) (tratando \(y\) como constante) ✓
B-6. Rotacional de un campo vectorial¶
Problema:
Figura de referencia: Figura A.1: Geometría del producto vectorial (Apéndice A)
Calcula componente a componente el rotacional \(\nabla \times \boldsymbol{F}\) del campo vectorial \(\boldsymbol{F} = (yz,\; xz,\; xy)\).
Cálculo:
Verificación: Dado que \(\boldsymbol{F} = (yz, xz, xy) = \nabla(xyz)\), el rotacional de un campo gradiente es idénticamente cero. En efecto, \(\partial(xyz)/\partial x = yz\), \(\partial(xyz)/\partial y = xz\), \(\partial(xyz)/\partial z = xy\) ✓
B-7. Laplaciano de un campo escalar¶
Problema:
Calcula el laplaciano \(\Delta\varphi = \nabla^2\varphi\) del campo escalar \(\varphi = e^x \sin y + z^3\).
Cálculo:
Verificación: La parte \(e^x \sin y\) es una función armónica bidimensional (\(\Delta_{2D}(e^x \sin y) = 0\)), por lo que su contribución al laplaciano es cero. El laplaciano de \(z^3\) es \(6z\). Coincide ✓
B-8. Verificación de la identidad de Lagrange¶
Problema:
Utilizando la identidad de Lagrange, calcula \(|\boldsymbol{a} \times \boldsymbol{b}|^2\) como \(|\boldsymbol{a}|^2|\boldsymbol{b}|^2 - (\boldsymbol{a} \cdot \boldsymbol{b})^2\) para \(\boldsymbol{a} = (1,\, 2,\, 0)\), \(\boldsymbol{b} = (0,\, 1,\, 3)\), y verifica que el resultado coincide con el obtenido al calcular directamente el cuadrado de la magnitud del producto vectorial.
Cálculo (lado derecho):
Cálculo (lado izquierdo):
Ambos lados coinciden ✓
B-9. Verificación de la fórmula BAC-CAB¶
Problema:
Verifica la fórmula BAC-CAB \(\boldsymbol{a} \times (\boldsymbol{b} \times \boldsymbol{c}) = \boldsymbol{b}(\boldsymbol{a} \cdot \boldsymbol{c}) - \boldsymbol{c}(\boldsymbol{a} \cdot \boldsymbol{b})\) calculando por separado el lado izquierdo y el lado derecho para el caso \(\boldsymbol{a} = (1,0,0)\), \(\boldsymbol{b} = (0,1,0)\), \(\boldsymbol{c} = (0,0,1)\), y confirma que la igualdad se cumple.
Cálculo del lado izquierdo:
Cálculo del lado derecho:
Verificación: \(\boldsymbol{a} = \boldsymbol{e}_1\), \(\boldsymbol{b} = \boldsymbol{e}_2\), \(\boldsymbol{c} = \boldsymbol{e}_3\) son la base estándar mutuamente ortogonal, por lo que \(\boldsymbol{a} \cdot \boldsymbol{b} = \boldsymbol{a} \cdot \boldsymbol{c} = 0\) es natural. Además, como \(\boldsymbol{b} \times \boldsymbol{c} = \boldsymbol{e}_1 = \boldsymbol{a}\), también es natural que \(\boldsymbol{a} \times \boldsymbol{a} = \boldsymbol{0}\) ✓
B-10. Verificación de rot(grad) = 0¶
Problema:
Referencia: La identidad del rotacional \(\nabla \times (\nabla\varphi) = 0\) se explica en la sección A.5 de Apéndice A.
Para el campo escalar \(\varphi(x, y, z) = x^2 + y^2 + z^2\), verifica mediante cálculo por componentes que se cumple \(\operatorname{rot}(\operatorname{grad}\varphi) = \boldsymbol{0}\).
Cálculo:
Sea \(\boldsymbol{G} = \nabla\varphi = (2x, 2y, 2z)\):
Verificación: Este es un ejemplo concreto de la identidad \(\operatorname{rot}(\operatorname{grad}\varphi) = \boldsymbol{0}\). Cada componente se anula automáticamente como \(\frac{\partial^2 \varphi}{\partial y \partial z} - \frac{\partial^2 \varphi}{\partial z \partial y} = 0\), gracias a la conmutatividad de las derivadas parciales (dado que \(\varphi\) es de clase \(C^2\)) ✓
Intermedio¶
M-1. Demostración de la fórmula BAC-CAB¶
Problema:
Demuestra que $$\boldsymbol{a} \times (\boldsymbol{b} \times \boldsymbol{c}) = \boldsymbol{b}(\boldsymbol{a} \cdot \boldsymbol{c}) - \boldsymbol{c}(\boldsymbol{a} \cdot \boldsymbol{b}) $$ desarrollando la componente \(x\) del lado izquierdo y del lado derecho en términos de las componentes generales \(a_i, b_i, c_i\) y comparándolas. Explica (usando un argumento de simetría) por qué lo mismo se cumple para las componentes \(y\) y \(z\).
Estrategia de la solución:
Se expande la componente \(x\) del lado izquierdo \(\boldsymbol{a} \times (\boldsymbol{b} \times \boldsymbol{c})\) aplicando la definición del producto vectorial dos veces. También se expande la componente \(x\) del lado derecho \(\boldsymbol{b}(\boldsymbol{a} \cdot \boldsymbol{c}) - \boldsymbol{c}(\boldsymbol{a} \cdot \boldsymbol{b})\) y se muestra que ambas coinciden.
Detalle del cálculo:
Componente \(x\) del lado izquierdo:
Primero escribimos las componentes de \(\boldsymbol{b} \times \boldsymbol{c}\):
La componente \(x\) de \(\boldsymbol{a} \times (\boldsymbol{b} \times \boldsymbol{c})\) es:
Aquí sumamos y restamos \(a_1 c_1\) y \(a_1 b_1\) (dado que \(b_1 a_1 c_1 - c_1 a_1 b_1 = 0\), el valor no cambia):
Componente \(x\) del lado derecho:
Respuesta final:
Las componentes \(x\) del lado izquierdo y del lado derecho coinciden:
Sobre las componentes \(y\) y \(z\): En el cálculo anterior solo se utilizó la estructura cíclica de los índices \(1, 2, 3\). Dado que la definición del producto vectorial tiene la misma forma bajo permutaciones cíclicas de los índices \((1 \to 2 \to 3 \to 1)\), sustituyendo \(1 \to 2\), \(2 \to 3\), \(3 \to 1\) en la demostración de la componente \(x\) se obtiene directamente la demostración de la componente \(y\), y sustituyendo \(1 \to 3\), \(2 \to 1\), \(3 \to 2\) se obtiene la de la componente \(z\).
Por lo tanto, la igualdad se cumple para las tres componentes, y la fórmula BAC-CAB queda demostrada. \(\blacksquare\)
Verificación:
Confirmado con un ejemplo numérico concreto (base estándar) en D9 ✓
M-2. Demostración de div(rot) = 0¶
Problema:
Referencia: La identidad de la divergencia \(\nabla \cdot (\nabla \times \mathbf{F}) = 0\) se explica en la sección A.5 de Apéndice A.
Demuestra que esta identidad se cumple utilizando la representación por componentes. Además, explica brevemente cómo esta identidad se relaciona con el hecho físico de que "no existen monopolos magnéticos" (\(\operatorname{div}\boldsymbol{B} = 0\) y \(\boldsymbol{B} = \operatorname{rot}\boldsymbol{A}\)).
Estrategia de resolución:
Se escriben explícitamente las componentes de \(\operatorname{rot}\boldsymbol{F}\) y, al tomar la \(\operatorname{div}\), se muestra que todos los términos se cancelan por pares gracias a la conmutatividad de las derivadas parciales.
Cálculo detallado:
Sea \(\boldsymbol{F} = (F_1, F_2, F_3)\). Las componentes del rotacional son:
Tomamos la divergencia:
Si \(\boldsymbol{F}\) es suficientemente suave (de clase \(C^2\)), el orden de las derivadas parciales es intercambiable: \(\frac{\partial^2 F_i}{\partial x_j \partial x_k} = \frac{\partial^2 F_i}{\partial x_k \partial x_j}\). Por lo tanto:
- \(\frac{\partial^2 F_3}{\partial x \partial y}\) y \(-\frac{\partial^2 F_3}{\partial y \partial x}\) se cancelan
- \(-\frac{\partial^2 F_2}{\partial x \partial z}\) y \(\frac{\partial^2 F_2}{\partial z \partial x}\) se cancelan
- \(\frac{\partial^2 F_1}{\partial y \partial z}\) y \(-\frac{\partial^2 F_1}{\partial z \partial y}\) se cancelan
Significado físico:
En electromagnetismo, el campo magnético \(\boldsymbol{B}\) se puede escribir mediante un potencial vector \(\boldsymbol{A}\) como \(\boldsymbol{B} = \nabla \times \boldsymbol{A}\). Aplicando la identidad anterior:
Esto corresponde a una de las ecuaciones de Maxwell, \(\nabla \cdot \boldsymbol{B} = 0\) (inexistencia de monopolos magnéticos). Es decir, el hecho de que el campo magnético pueda expresarse como el rotacional de un potencial vector es automáticamente consistente con la inexistencia de monopolos magnéticos, gracias a la identidad matemática \(\operatorname{div}(\operatorname{rot}) = 0\). Dicho de otro modo, si existieran monopolos magnéticos se tendría \(\nabla \cdot \boldsymbol{B} \neq 0\), y \(\boldsymbol{B}\) no podría representarse globalmente como el rotacional de un único potencial vector. \(\blacksquare\)
M-3. Fórmula del producto escalar entre productos vectoriales¶
Problema:
Sustituyendo \(\boldsymbol{c} = \boldsymbol{a}\), \(\boldsymbol{d} = \boldsymbol{b}\) en esta expresión, deduce la identidad de Lagrange
Además, a partir de este resultado, demuestra que \(|\boldsymbol{a} \times \boldsymbol{b}| = |\boldsymbol{a}||\boldsymbol{b}|\sin\theta\) (donde \(\theta\) es el ángulo entre \(\boldsymbol{a}\) y \(\boldsymbol{b}\)).
Detalle del cálculo:
Deducción de la identidad de Lagrange:
Fórmula del producto escalar entre dos productos vectoriales:
Sustituimos \(\boldsymbol{c} = \boldsymbol{a}\), \(\boldsymbol{d} = \boldsymbol{b}\):
Deducción de \(|\boldsymbol{a} \times \boldsymbol{b}| = |\boldsymbol{a}||\boldsymbol{b}|\sin\theta\):
Si \(\theta\) (\(0 \leq \theta \leq \pi\)) es el ángulo entre \(\boldsymbol{a}\) y \(\boldsymbol{b}\), entonces \(\boldsymbol{a} \cdot \boldsymbol{b} = |\boldsymbol{a}||\boldsymbol{b}|\cos\theta\), por lo que:
Como \(\sin\theta \geq 0\) cuando \(0 \leq \theta \leq \pi\), tomando la raíz cuadrada positiva de ambos miembros:
Verificación:
\(\theta = 0\) (paralelos): \(|\boldsymbol{a} \times \boldsymbol{b}| = 0\) ✓ (el producto vectorial de vectores paralelos es cero)
\(\theta = \pi/2\) (perpendiculares): \(|\boldsymbol{a} \times \boldsymbol{b}| = |\boldsymbol{a}||\boldsymbol{b}|\) ✓ (por ejemplo, \(\boldsymbol{e}_1 \times \boldsymbol{e}_2 = \boldsymbol{e}_3\) con \(|\boldsymbol{e}_3| = 1 = 1 \cdot 1\))
\(\theta = \pi\) (antiparalelos): \(|\boldsymbol{a} \times \boldsymbol{b}| = 0\) ✓ (\(\sin\pi = 0\), y el producto vectorial de vectores antiparalelos también es cero)
También verificado con el ejemplo numérico de D8 ✓
M-4. Fórmula de la divergencia de un producto¶
Problema:
Referencia: Para las fórmulas de productos, consulta la lista de identidades en A.5 de Apéndice A.
Demuestra mediante la representación en componentes que
Estrategia de resolución:
Escribe \(\operatorname{div}(\varphi\,\boldsymbol{F})\) en representación por componentes y aplica la regla del producto de Leibniz a cada término para desarrollarlo.
Desarrollo del cálculo:
Sea \(\boldsymbol{F} = (F_1, F_2, F_3)\).
Aplica la regla del producto de Leibniz \(\frac{\partial(\varphi F_i)}{\partial x_i} = \frac{\partial\varphi}{\partial x_i}F_i + \varphi\frac{\partial F_i}{\partial x_i}\) a cada término:
Sumando todos los términos:
El primer paréntesis es el producto escalar del gradiente con el campo vectorial \((\nabla\varphi) \cdot \boldsymbol{F}\), y el segundo paréntesis es la divergencia del campo vectorial \(\operatorname{div}\boldsymbol{F}\), por lo que:
\(\blacksquare\)
Verificación:
Comprobamos con ejemplos concretos. Sea \(\varphi = x\), \(\boldsymbol{F} = (y, 0, 0)\):
- Lado izquierdo: \(\operatorname{div}(xy, 0, 0) = \frac{\partial(xy)}{\partial x} + 0 + 0 = y\)
- Lado derecho: \((\nabla x) \cdot (y, 0, 0) + x \cdot \operatorname{div}(y, 0, 0) = (1, 0, 0) \cdot (y, 0, 0) + x \cdot 0 = y + 0 = y\)
Coinciden ✓
Otro ejemplo. Sea \(\varphi = x^2 + y^2 + z^2\), \(\boldsymbol{F} = (x, y, z)\):
- \(\varphi\boldsymbol{F} = ((x^2+y^2+z^2)x,\; (x^2+y^2+z^2)y,\; (x^2+y^2+z^2)z)\)
- Derivada parcial de la componente \(x\) del lado izquierdo: \(\frac{\partial}{\partial x}[(x^2+y^2+z^2)x] = (2x)x + (x^2+y^2+z^2) = 2x^2 + x^2+y^2+z^2\). De manera análoga se calculan las componentes \(y\) y \(z\), y al sumar: \(2(x^2+y^2+z^2) + 3(x^2+y^2+z^2) = 5(x^2+y^2+z^2)\)
- Lado derecho: \((\nabla\varphi) \cdot \boldsymbol{F} + \varphi(\operatorname{div}\boldsymbol{F}) = (2x,2y,2z)\cdot(x,y,z) + (x^2+y^2+z^2) \cdot 3 = 2(x^2+y^2+z^2) + 3(x^2+y^2+z^2) = 5(x^2+y^2+z^2)\)
Coinciden ✓
M-5. Teorema de Gauss y campo de Coulomb¶
Problema:
Utilizando el teorema de Gauss (divergencia), demuestra que para el campo eléctrico de Coulomb \(\boldsymbol{E} = \frac{q}{4\pi\varepsilon_0}\frac{\boldsymbol{r}}{r^3}\) (\(\boldsymbol{r} = (x, y, z)\), \(r = |\boldsymbol{r}|\)) generado por una carga puntual \(q\) en el origen, la integral de superficie del campo eléctrico (flujo eléctrico) a través de cualquier superficie cerrada \(S\) que contenga el origen es igual a \(q/\varepsilon_0\). Para ello, puedes utilizar como auxiliar una superficie esférica de radio \(R\) centrada en el origen, y puedes usar el hecho de que \(\operatorname{div}\boldsymbol{E} = 0\) para \(r \neq 0\).
Estrategia de resolución:
Dentro de una superficie cerrada arbitraria \(S\) que contenga el origen, se toma una superficie esférica \(S_\epsilon\) de radio \(\epsilon\) suficientemente pequeño centrada en el origen. En la región \(V'\) comprendida entre \(S\) y \(S_\epsilon\), dado que \(r \neq 0\), se cumple \(\operatorname{div}\boldsymbol{E} = 0\). Aplicando el teorema de Gauss a esta región, se reduce la integral de superficie sobre \(S\) a la integral de superficie sobre \(S_\epsilon\).
Desarrollo del cálculo:
Paso 1: Verificación de \(\operatorname{div}\boldsymbol{E} = 0\) para \(r \neq 0\)
Para \(\boldsymbol{E} = \frac{q}{4\pi\varepsilon_0}\frac{\boldsymbol{r}}{r^3}\), calculamos la divergencia de \(\frac{\boldsymbol{r}}{r^3} = \left(\frac{x}{(x^2+y^2+z^2)^{3/2}},\; \frac{y}{(x^2+y^2+z^2)^{3/2}},\; \frac{z}{(x^2+y^2+z^2)^{3/2}}\right)\).
Derivada parcial de la componente \(x\):
Calculando de manera análoga las componentes \(y\) y \(z\) y sumando:
Paso 2: Aplicación del teorema de Gauss
Consideramos la región \(V'\) encerrada entre \(S\) y \(S_\epsilon\). La frontera de \(V'\) está formada por \(S\) en el exterior (normal hacia afuera) y \(S_\epsilon\) en el interior (cuya normal exterior respecto a \(V'\) apunta hacia el origen, es decir, en la dirección \(-\hat{\boldsymbol{r}}\)).
Dado que en \(V'\) se cumple \(\operatorname{div}\boldsymbol{E} = 0\), por el teorema de Gauss:
Sobre \(S_\epsilon\), la normal exterior respecto a \(V'\) apunta en la dirección \(-\hat{\boldsymbol{r}}\), por lo que \(d\boldsymbol{S}_{V'\text{exterior}} = -\hat{\boldsymbol{r}}\, dA\). Por tanto:
Paso 3: Cálculo de la integral de superficie sobre la esfera
Sobre \(S_\epsilon\) se tiene \(r = \epsilon\) (constante), y \(\boldsymbol{E}\) apunta en la dirección radial con magnitud constante:
Por lo tanto:
Integrando sobre toda la superficie esférica:
Respuesta final:
Se cumple para cualquier superficie cerrada \(S\) que contenga el origen. \(\blacksquare\)
Verificación:
- Análisis dimensional: \([E] = \text{V/m}\), \([dS] = \text{m}^2\), por lo que \([E \cdot dS] = \text{V·m}\). \([q/\varepsilon_0] = \text{C}/(\text{C}^2\text{s}^2/(\text{kg·m}^3))\), que simplificado da \(\text{kg·m}^3/(\text{C·s}^2) = \text{V·m}\). Consistente ✓
- Caso particular: Si \(S\) es una superficie esférica de radio \(R\), el cálculo directo da \(\frac{q}{4\pi\varepsilon_0 R^2} \cdot 4\pi R^2 = q/\varepsilon_0\) ✓
- Caso \(q < 0\): El campo eléctrico apunta hacia el origen (dirección \(-\hat{\boldsymbol{r}}\)), por lo que el producto escalar con la normal exterior es negativo. El flujo \(q/\varepsilon_0 < 0\), lo cual es consistente ✓
Avanzado¶
A-1. Identidades con el símbolo de Levi-Civita¶
Problema:
se puede escribir así. Responde las siguientes preguntas.
(a) Admitiendo la fórmula de contracción
deduce, únicamente mediante cálculo con índices, la fórmula del producto escalar de dos productos vectoriales:
(b) Utilizando la misma fórmula de contracción, deduce la fórmula BAC-CAB: \(\boldsymbol{a} \times (\boldsymbol{b} \times \boldsymbol{c}) = \boldsymbol{b}(\boldsymbol{a} \cdot \boldsymbol{c}) - \boldsymbol{c}(\boldsymbol{a} \cdot \boldsymbol{b})\).
(c) Teniendo en cuenta la correspondencia con el tensor de Levi-Civita en 4 dimensiones \(\varepsilon^{\mu\nu\rho\sigma}\) que aparece en el texto principal, escribe la componente \(i\)-ésima de \(\operatorname{rot}\boldsymbol{F}\) usando \(\varepsilon_{ijk}\) en 3 dimensiones, y demuestra nuevamente la identidad \(\operatorname{div}(\operatorname{rot}\boldsymbol{F}) = 0\) mediante cálculo con índices.
(a) Fórmula del producto escalar de dos productos vectoriales:
Detalle del cálculo:
Aplicando la fórmula de contracción \(\sum_i \varepsilon_{ijk}\,\varepsilon_{ilm} = \delta_{jl}\delta_{km} - \delta_{jm}\delta_{kl}\):
\(\blacksquare\)
(b) Fórmula BAC-CAB:
Detalle del cálculo:
Como \(\varepsilon_{klm} = \varepsilon_{lmk}\) (invariante bajo permutaciones cíclicas), se tiene \(\sum_k \varepsilon_{ijk}\,\varepsilon_{klm} = \sum_k \varepsilon_{ijk}\,\varepsilon_{lmk}\).
Aplicando la fórmula de contracción \(\sum_k \varepsilon_{ijk}\,\varepsilon_{lmk} = \delta_{il}\delta_{jm} - \delta_{im}\delta_{jl}\):
Como esto se cumple para todo \(i\), queda demostrada la fórmula BAC-CAB. \(\blacksquare\)
(c) Demostración de \(\operatorname{div}(\operatorname{rot}\boldsymbol{F}) = 0\) mediante cálculo con índices:
Componente \(i\)-ésima de \(\operatorname{rot}\boldsymbol{F}\):
donde \(\partial_j = \frac{\partial}{\partial x_j}\).
Cálculo de \(\operatorname{div}(\operatorname{rot}\boldsymbol{F})\):
Aquí, \(\partial_i \partial_j F_k\) es simétrico en los índices \(i, j\) (cuando \(\boldsymbol{F}\) es de clase \(C^2\), \(\partial_i \partial_j = \partial_j \partial_i\)), mientras que \(\varepsilon_{ijk}\) es antisimétrico en los índices \(i, j\) (\(\varepsilon_{ijk} = -\varepsilon_{jik}\)).
La contracción de un tensor simétrico con un tensor antisimétrico es cero. Demostrémoslo explícitamente:
Intercambiando las variables mudas \(i \leftrightarrow j\):
(En la primera igualdad se renombraron las variables mudas \(i \leftrightarrow j\), y en la segunda se usaron \(\varepsilon_{jik} = -\varepsilon_{ijk}\) (antisimetría) y \(\partial_j \partial_i = \partial_i \partial_j\) (conmutación de derivadas parciales).)
Por lo tanto \(S = -S\), es decir \(2S = 0\), de donde:
\(\blacksquare\)
Correspondencia con 4 dimensiones: En la parte principal sobre relatividad general, se utilizó el tensor de Levi-Civita en 4 dimensiones \(\varepsilon^{\mu\nu\rho\sigma}\) para la construcción del tensor dual. De la misma manera que \(\varepsilon_{ijk}\) en 3 dimensiones define el rotacional (rot), \(\varepsilon^{\mu\nu\rho\sigma}\) en 4 dimensiones define el dual del tensor electromagnético \(F_{\mu\nu}\): \({}^*F^{\mu\nu} = \frac{1}{2}\varepsilon^{\mu\nu\rho\sigma}F_{\rho\sigma}\). La versión en 4 dimensiones de \(\operatorname{div}(\operatorname{rot}) = 0\) corresponde a la identidad de Bianchi \(\partial_{[\mu}F_{\nu\rho]} = 0\), que da lugar a las ecuaciones homogéneas de Maxwell (\(\nabla \cdot \boldsymbol{B} = 0\) y la ley de Faraday).
Verificación:
(a) Sustituyendo \(\boldsymbol{c} = \boldsymbol{a}\), \(\boldsymbol{d} = \boldsymbol{b}\) se obtiene la identidad de Lagrange, consistente con S3 ✓
(b) Consistente con el ejemplo numérico de D9 ✓
(c) Consistente con la demostración por componentes de S2 ✓
A-2. Aplicaciones del teorema de Stokes¶
Problema:
Referencia: El teorema de Stokes se explica en la sección A.6 de Apéndice A.
Usando esta expresión, discute lo siguiente.
(a) Cuando un campo vectorial \(\boldsymbol{F}\) puede escribirse como \(\boldsymbol{F} = \nabla\varphi\) (el gradiente de un campo escalar \(\varphi\)), demuestra que la integral de línea a lo largo de cualquier curva cerrada \(C\) satisface \(\oint_C \boldsymbol{F} \cdot d\boldsymbol{r} = 0\), utilizando el teorema de Stokes y la identidad \(\nabla \times (\nabla\varphi) = \boldsymbol{0}\).
(b) Recíprocamente, demuestra que si en una región simplemente conexa se cumple \(\nabla \times \boldsymbol{F} = \boldsymbol{0}\), entonces existe un campo escalar \(\varphi\) tal que \(\boldsymbol{F} = \nabla\varphi\), mostrando el método de construcción de \(\varphi\) mediante una integral de línea.
(c) En el contexto de la relatividad general tratado en el texto principal, «el desfase de un vector al transportarlo paralelamente a lo largo de una curva cerrada» se describe mediante el tensor de curvatura. Discute cualitativamente la relación entre el teorema de Stokes y la curvatura, desde el punto de vista de que \(\operatorname{rot}\boldsymbol{F}\) representa «la circulación por unidad de curva cerrada infinitesimal» (no se requiere un cálculo cuantitativo).
(a) La integral de línea de un campo gradiente sobre una curva cerrada es cero:
Demostración:
Sea \(\boldsymbol{F} = \nabla\varphi\). Para cualquier curva cerrada \(C\), tomamos una superficie \(S\) cuyo borde sea \(C\). Por el teorema de Stokes:
Por la identidad \(\nabla \times (\nabla\varphi) = \boldsymbol{0}\) (verificada en D10; en general se deduce de la conmutatividad de las derivadas parciales):
\(\blacksquare\)
Demostración alternativa (método directo sin usar el teorema de Stokes): Parametrizamos \(C\) como \(\boldsymbol{r}(t)\) (\(t: a \to b\), \(\boldsymbol{r}(a) = \boldsymbol{r}(b)\)):
(Como la curva es cerrada, el punto inicial y el final coinciden.) Esta demostración alternativa no requiere el teorema de Stokes. ✓
(b) Un campo irrotacional posee un potencial escalar:
Demostración:
Supongamos que \(\nabla \times \boldsymbol{F} = \boldsymbol{0}\) se cumple en una región simplemente conexa \(D\).
Paso 1: Construcción de \(\varphi\)
Elegimos un punto fijo \(\boldsymbol{r}_0 \in D\) y para cualquier punto \(\boldsymbol{r} \in D\) definimos:
donde la integral se realiza a lo largo de cualquier curva dentro de \(D\) que vaya de \(\boldsymbol{r}_0\) a \(\boldsymbol{r}\).
Paso 2: Independencia del camino
Tomamos dos caminos \(C_1\) y \(C_2\) de \(\boldsymbol{r}_0\) a \(\boldsymbol{r}\). Conectando \(C_1\) con \(C_2^{-1}\) (el camino \(C_2\) recorrido en sentido inverso) obtenemos una curva cerrada \(C = C_1 + C_2^{-1}\). Como \(D\) es simplemente conexo, existe una superficie \(S \subset D\) cuyo borde es \(C\). Por el teorema de Stokes:
Por lo tanto:
Así, \(\varphi(\boldsymbol{r})\) está bien definida independientemente de la elección del camino.
Paso 3: Verificación de que \(\nabla\varphi = \boldsymbol{F}\)
Consideramos el camino recto de \(\boldsymbol{r}\) a \(\boldsymbol{r} + \delta\boldsymbol{r}\) (con \(\delta\boldsymbol{r} = \delta x\, \boldsymbol{e}_1\)):
Por lo tanto:
De manera análoga para las componentes \(y\) y \(z\) se obtiene \(\frac{\partial\varphi}{\partial y} = F_2\), \(\frac{\partial\varphi}{\partial z} = F_3\), por lo que:
\(\blacksquare\)
Nota: La hipótesis de conexión simple es esencial. Por ejemplo, en \(D = \mathbb{R}^3 \setminus \{z\text{-eje}\}\) (el espacio sin el eje \(z\)), el campo \(\boldsymbol{F} = \frac{1}{x^2+y^2}(-y, x, 0)\) satisface \(\nabla \times \boldsymbol{F} = \boldsymbol{0}\), pero la integral de línea a lo largo de una curva cerrada que rodea el eje \(z\) vale \(2\pi \neq 0\), y no existe un potencial escalar global.
(c) Relación entre el teorema de Stokes y la curvatura:
Discusión cualitativa:
El teorema de Stokes establece que la circulación (integral de línea) de un campo vectorial \(\boldsymbol{F}\) a lo largo de una curva cerrada \(C\) es igual a la integral de superficie de \(\nabla \times \boldsymbol{F}\) sobre una superficie \(S\) cuyo borde es \(C\):
En particular, para una curva cerrada infinitesimal (de área \(\delta A\) y normal \(\hat{\boldsymbol{n}}\)):
Es decir, \(\operatorname{rot}\boldsymbol{F}\) representa la "circulación por unidad de área".
En relatividad general, el tensor de curvatura \(R^\mu{}_{\nu\rho\sigma}\) desempeña un papel completamente análogo. Cuando un vector \(V^\mu\) se transporta paralelamente a lo largo de un paralelogramo infinitesimal cerrado (con lados \(\delta x^\rho\) y \(\delta x^\sigma\)), al completar el recorrido el vector experimenta un cambio. Dicho cambio viene dado por
Esto puede considerarse como la versión del teorema de Stokes en relatividad general:
| Análisis vectorial (\(\mathbb{R}^3\)) | Relatividad general (espacio-tiempo curvo) |
|---|---|
| Circulación del campo vectorial \(\boldsymbol{F}\) | Cambio del vector \(V^\mu\) por transporte paralelo |
| Rotacional \(\nabla \times \boldsymbol{F}\) | Tensor de curvatura de Riemann \(R^\mu{}_{\nu\rho\sigma}\) |
| Área de la curva cerrada infinitesimal \(\delta A\) | Área del paralelogramo infinitesimal \(\delta x^\rho \wedge \delta x^\sigma\) |
- En un espacio plano (\(R^\mu{}_{\nu\rho\sigma} = 0\)), el transporte paralelo no depende del camino (circulación nula).
- En un espacio curvo (\(R^\mu{}_{\nu\rho\sigma} \neq 0\)), el transporte paralelo depende del camino (circulación no nula).
Esta correspondencia muestra que el tensor de curvatura es la cantidad que mide la "no conmutatividad del transporte paralelo", lo cual es consistente con la derivación del tensor de Riemann estudiada en Cap. 12. \(\square\)
Feedback on this page
Let us know if something was unclear, incorrect, or could be improved.