Capítulo 3 Relatividad especial — Transformación de Lorentz y consecuencias físicas¶
Resumen de los capítulos anteriores: En Cap. 1 vimos el éxito y las limitaciones del modelo gravitatorio de Newton — la desviación de 43″/siglo en la precesión del perihelio de Mercurio y el problema estructural de que la ecuación de Poisson no contiene derivadas temporales, lo que implica que la gravedad se propaga instantáneamente. En Cap. 2 desplegamos el plano de diseño de "crear leyes físicas independientes de las coordenadas", presentamos la herramienta de los tensores y dimos una visión panorámica de la idea de describir la gravedad como curvatura del espaciotiempo. A partir de este capítulo, implementaremos ese plano de diseño paso a paso de forma concreta.
Objetivos de este capítulo
- Dentro de la jerarquía tensorial vista panorámicamente en Cap. 2, derivar a partir del principio de invariancia de la velocidad de la luz el tensor de rango 0 (invariante) más fundamental — el intervalo espaciotemporal \(ds^2\), una cantidad cuyo valor no cambia bajo transformaciones de coordenadas
- A partir de ahí, derivar la transformación de Lorentz y comprender las consecuencias físicas de la relatividad especial: relatividad de la simultaneidad, dilatación del tiempo y contracción de la longitud
- En este capítulo nos enfocamos en la "física de la relatividad especial"; las herramientas matemáticas para describir el espaciotiempo de Minkowski (métrica, 4-vectores, tensores) se desarrollarán en el siguiente capítulo
3.1 Dos postulados¶
🟡 Lina: Al final de Cap. 2, anuncié la derivación del invariante espaciotemporal \(ds^2 = -(cdt)^2 + dx^2 + dy^2 + dz^2\). Para derivar esta expresión, necesitamos confirmar primero los postulados que sirven como punto de partida — es decir, la base que "aceptamos como hecho experimental". El punto de partida de la relatividad especial son solo dos postulados.
Postulado 1 (Principio de relatividad): Los modelos físicos toman la misma forma en todos los sistemas de referencia inerciales (inertial frame).
Postulado 2 (Principio de invariancia de la velocidad de la luz): La velocidad de la luz en el vacío \(c\) es constante, independientemente del movimiento de la fuente o del observador.
🔵 Kai: ¿Qué es exactamente un "sistema de referencia inercial"?
🟡 Lina: Podemos decir que es el sistema de coordenadas de un observador que no está acelerando ni rotando. Es el mundo visto desde un observador que se mueve en línea recta a velocidad constante (o que está en reposo). Cuando un tren avanza recto a velocidad constante, el sistema de coordenadas para las personas dentro del vagón es un sistema inercial. Cuando el tren acelera o toma una curva, ya no es un sistema inercial.
🔵 Kai: Entiendo, ya me hago una idea. El postulado 1 es algo que existe desde la época de Galilei (Galileo), ¿verdad? Como que si lanzas una pelota dentro de un tren que se mueve a velocidad constante, se cumple la misma ecuación de movimiento que en el suelo.
🟡 Lina: Exacto. Dicho con más precisión, si la fuerza depende solo de la posición relativa entre partículas, como la gravedad de Newton, entonces aunque las coordenadas se desplacen con la transformación de Galileo, la posición relativa no cambia, así que la forma de la ecuación de movimiento se conserva. Por ejemplo, la fuerza gravitatoria entre dos partículas depende solo de la posición relativa \(\mathbf{r}_1 - \mathbf{r}_2\), así que aunque desplaces el origen de coordenadas, la expresión de la fuerza mantiene la misma forma. Sin embargo, el postulado 1 está limitado a "sistemas inerciales".
⚪ Mei: ¿"Limitado a sistemas inerciales" significa que en sistemas de coordenadas acelerados la forma de las leyes físicas cambia?
🟡 Lina: Sí. El propio Einstein se sentía insatisfecho con esta limitación. "¿Por qué solo los sistemas inerciales son especiales? ¿No deberían las leyes físicas tomar la misma forma en todos los sistemas de coordenadas?" — Esta pregunta fue una de las motivaciones que más tarde dieron origen a la relatividad general (1915). Pero empecemos primero con lo que ocurre entre sistemas inerciales.
🟡 Lina: El problema está en el postulado 2. En la transformación de Galileo, las velocidades simplemente se suman y restan, por lo que la constancia de la velocidad de la luz genera una contradicción. Es decir, debemos modificar la transformación de Galileo. Resumiré la relación entre los dos postulados en una tabla.
Tabla 3.1: Comparación de los dos postulados de la relatividad especial
| Postulado 1 (Principio de relatividad) | Postulado 2 (Principio de invariancia de la velocidad de la luz) | |
|---|---|---|
| Contenido | Las leyes físicas tienen la misma forma en todos los sistemas inerciales | La velocidad de la luz \(c\) es constante independientemente del movimiento de la fuente o el observador |
| Historia | Existe desde la época de Galileo | Respaldado por el experimento de Michelson-Morley de 1887 |
| Compatibilidad con la transformación de Galileo | Compatible | Contradictorio (la suma de velocidades no se cumple) |
| Consecuencia | La forma de las leyes físicas no cambia bajo transformaciones de coordenadas | El tiempo y el espacio se mezclan → se necesita la transformación de Lorentz |
🔵 Kai: ¿Cómo se produce concretamente la contradicción?
🟡 Lina: Con un ejemplo cotidiano: si lanzas una pelota hacia adelante desde un tren en movimiento, la velocidad de la pelota vista desde el suelo es "velocidad del tren + velocidad de la pelota":
Esta es la suma de velocidades en la transformación de Galileo. Detrás de esta suma hay una suposición implícita: "el tiempo es el mismo para todo observador" — es decir, \(t' = t\). Sin embargo, si desde un tren en movimiento emites luz hacia adelante, la velocidad de la luz vista desde el suelo no es "velocidad del tren + \(c\)", sino que sigue siendo \(c\). La regla de suma de velocidades à la Galileo no funciona para la luz.
⚪ Mei: La premisa de la transformación de Galileo — \(t' = t\), es decir, el tiempo es absoluto — es lo que está equivocado en algún punto.
🟡 Lina: Así es. Debemos tratar tanto el tiempo como las coordenadas espaciales como cantidades que cambian según el observador. Pero para llegar a esa conclusión necesitamos respaldo experimental.
🔵 Kai: ¿Se ha verificado experimentalmente que la velocidad de la luz es constante?
🟡 Lina: Sí. El experimento de Michelson-Morley de 1887 no detectó dependencia direccional de la velocidad de la luz hasta un orden de \(\sim 10^{-8}\). En aquella época se pensaba que existía el éter (aether) como medio de propagación de la luz, y si la Tierra se movía respecto al éter, debería aparecer una dependencia direccional de la velocidad de la luz — el experimento intentaba detectar eso. El resultado fue "sin anisotropía". Los experimentos mejorados posteriores aumentaron drásticamente la precisión, y los experimentos modernos con cavidades láser han confirmado la isotropía de la velocidad de la luz (ausencia de diferencias según la dirección) hasta un orden de \(10^{-18}\). Además, el experimento de Kennedy-Thorndike y sus versiones modernas han verificado con alta precisión que la velocidad de la luz no depende de la velocidad del observador. La invariancia de la velocidad de la luz es un hecho experimental extremadamente sólido.
⚪ Mei: \(10^{-18}\)... eso significa que es prácticamente perfectamente constante.
🟡 Lina: Así es (consulta también Fig. 3.1「Diagrama conceptual del experimento de Michelson-Morley (Michelson-Morley experiment)」). La revolución de Einstein consistió en aceptar este hecho experimental no como una "corrección superficial", sino como un principio fundamental de la física.
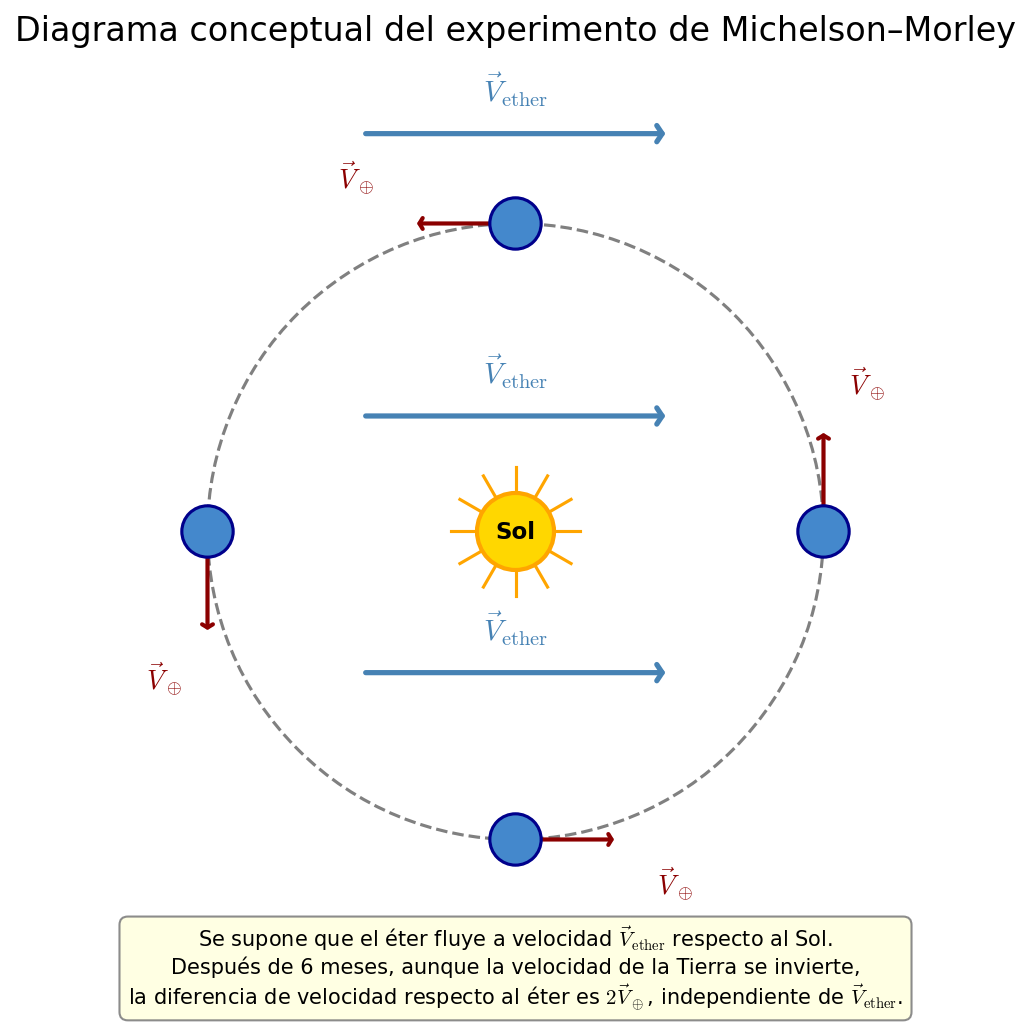
Fig. 3.1: Diagrama conceptual del experimento de Michelson-Morley (Michelson-Morley experiment). Intentó detectar el movimiento de la Tierra respecto al éter, pero no se encontró anisotropía en la velocidad de la luz.
Ahora veamos qué se deduce de estos dos postulados — sigámoslos paso a paso.
✅ Verificación de comprensión: ¿Por qué la transformación de Galileo contradice el principio de invariancia de la velocidad de la luz?
Respuesta
En la transformación de Galileo las velocidades se suman y restan simplemente (\(v_{\text{suelo}} = v_{\text{tren}} + v_{\text{pelota}}\)). Según esta regla, la velocidad de la luz emitida desde una fuente en movimiento debería depender del estado de movimiento del observador y diferir de \(c\), pero el principio de invariancia de la velocidad de la luz exige que la velocidad de la luz sea \(c\) en cualquier sistema inercial. Esta contradicción significa que la premisa de la transformación de Galileo — el tiempo absoluto (\(t' = t\)) — no se cumple.
✅ Verificación de comprensión: Enuncia los dos postulados de la relatividad especial.
Respuesta
Postulado 1 (Principio de relatividad): Los modelos físicos toman la misma forma en todos los sistemas de referencia inerciales. Postulado 2 (Principio de invariancia de la velocidad de la luz): La velocidad de la luz en el vacío \(c\) es constante, independientemente del movimiento de la fuente o del observador.
✅ Verificación de comprensión: ¿Qué tipo de sistema de coordenadas es un sistema inercial? Da un ejemplo de un sistema que no sea inercial.
Respuesta
Es el sistema de coordenadas de un observador que no está acelerando ni rotando. Es el mundo visto desde un observador que se mueve en línea recta a velocidad constante (o que está en reposo). Ejemplos de sistemas no inerciales: el interior de un tren que está acelerando, el interior de un tren que está tomando una curva, sobre una atracción de feria en rotación, etc.
🟡 Lina: Tengamos una imagen concreta de lo que significa el principio de invariancia de la velocidad de la luz. Coloquemos una fuente de luz en el origen del sistema inercial \(S\) y supongamos que emite luz en el instante \(t = 0\). La luz se propaga en todas direcciones a la misma velocidad \(c\) en el vacío, así que el punto \((x, y, z)\) al que la luz ha llegado en el instante \(t\) se encuentra en la superficie esférica de radio \(ct\) (Fig. 3.2「Evolución temporal del frente de onda esférico de la luz」).
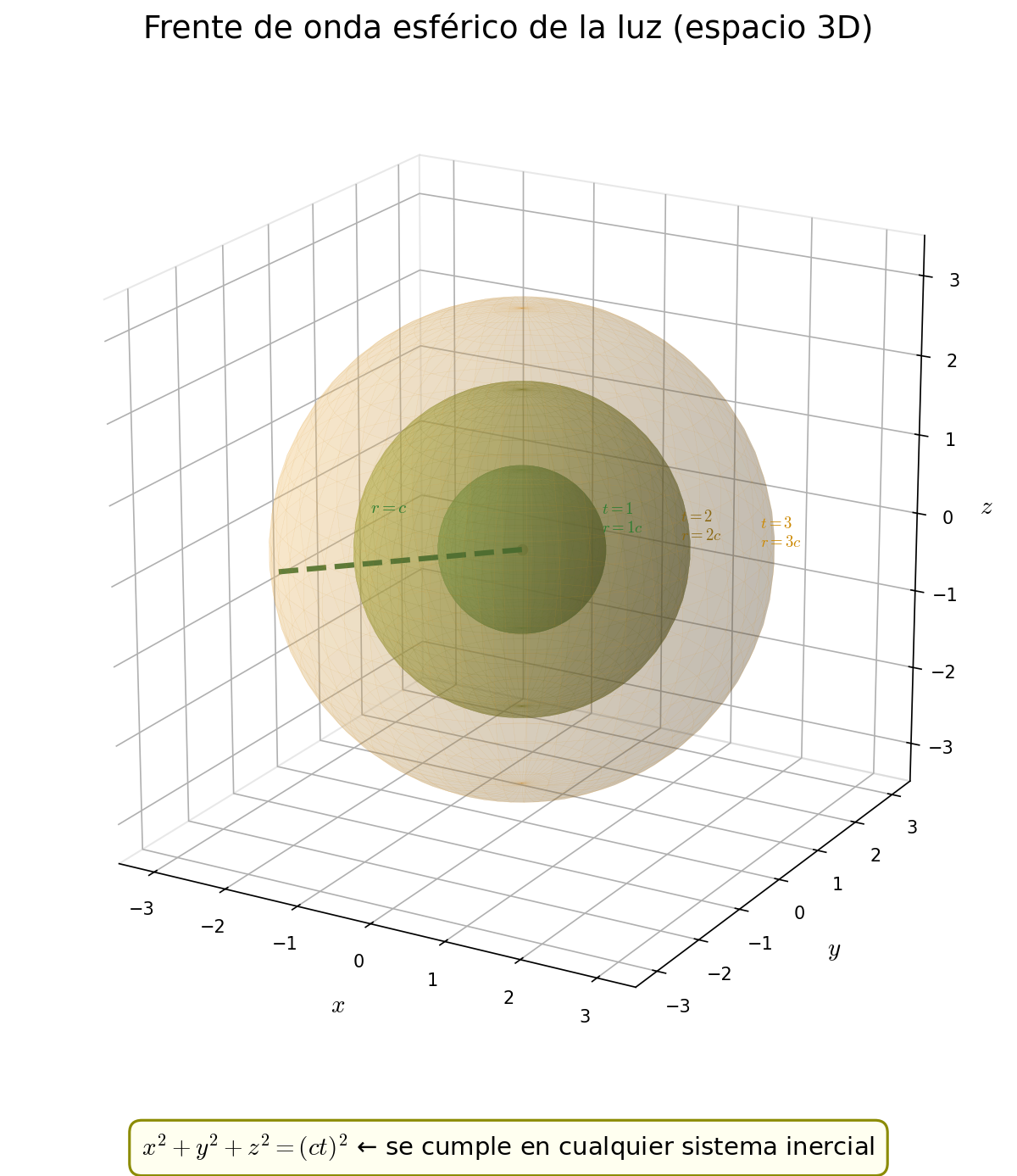
Fig. 3.2: Evolución temporal del frente de onda esférico de la luz. La luz emitida desde la fuente en el origen se expande a velocidad constante en todas las direcciones, alcanzando en el instante \(t\) la superficie esférica de radio \(r = ct\). Se muestran superpuestas las esferas en tres instantes \(t = 1, 2, 3\).
🔵 Kai: Si el radio de la esfera es \(ct\), entonces \(x^2 + y^2 + z^2 = (ct)^2\), ¿verdad? Pero si lo vemos desde otro sistema inercial, la fuente de luz se está moviendo, así que el centro de la esfera se desplaza y... ¿no deja de ser una esfera?
🟡 Lina: Ahí está el punto clave de la invariancia de la velocidad de la luz. Incluso si observamos la misma luz desde otro sistema inercial \(S'\) (con coordenadas \((t', x', y', z')\)), la velocidad de la luz sigue siendo \(c\). Por lo tanto, en el sistema \(S'\) también se cumple \(x'^2 + y'^2 + z'^2 = c^2 t'^2\). Sin importar desde qué sistema inercial se observe, la luz se expande en forma esférica — la esfera dibujada en Fig. 3.2「Evolución temporal del frente de onda esférico de la luz」 se ve igual (centrada en el origen de \(S'\)) también en el sistema \(S'\). Este es el significado concreto de la invariancia de la velocidad de la luz. A partir de este hecho se determina la forma del invariante del espaciotiempo.
⚪ Mei: Es decir, en cualquier sistema inercial se ve como "una esfera centrada en uno mismo" — ese es el contenido concreto de la invariancia de la velocidad de la luz.
3.2 Invariancia del intervalo espaciotemporal¶
🟡 Lina: En esta sección, primero buscaremos el invariante para la luz. Usando el principio de invariancia de la velocidad de la luz, la forma de \(ds^2\) queda determinada de manera única. Después, confirmaremos el significado físico de \(ds^2\) (eventos, cono de luz, tres clasificaciones), y luego demostraremos que \(ds^2\) es un invariante también para el caso general más allá de la luz, estableciendo así la universalidad del intervalo espaciotemporal — ese es el flujo que seguiremos. Pero antes de eso, necesitamos preparar en qué forma debemos escribir el invariante. Primero confirmemos "por qué se define con el cuadrado de cantidades infinitesimales" y "por qué es una combinación cuadrática", y después determinemos el signo con la invariancia de la velocidad de la luz — ese es el orden.
Por qué se define como "el cuadrado de la distancia infinitesimal"¶
🟡 Lina: Antes de entrar en la discusión del invariante espaciotemporal \(ds^2 = -(cdt)^2 + dx^2 + dy^2 + dz^2\), confirmemos primero "por qué tiene esta forma".
🔵 Kai: El invariante del espacio tridimensional era la distancia \(\ell = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2 + (z_2 - z_1)^2}\). Para empezar, ¿por qué aparecen cantidades infinitesimales como \(dx\) o \(dt\)?
🟡 Lina: Porque más adelante necesitaremos considerar que el espaciotiempo puede estar curvado. Cuando está curvado, esta fórmula no se puede usar. Piensa en la superficie de la Tierra. Por ejemplo, la distancia entre Tokio y Nueva York no se puede calcular solo con la diferencia de latitud y longitud, ¿verdad? Porque la superficie esférica está curvada. Pero en un rango muy pequeño a tus pies — de un metro cuadrado aproximadamente — el suelo parece plano.
🔵 Kai: ¡Ah, por eso se escribe con cantidades infinitesimales! Porque aunque esté curvado, en un rango suficientemente pequeño se ve plano.
🟡 Lina: Exacto. Incluso en un espacio curvado, una región suficientemente pequeña es localmente plana — es la misma idea que cuando haces zoom suficiente en Google Maps sobre la superficie terrestre, la curvatura desaparece y parece un mapa plano. Si una superficie se curva suavemente, por mucho que se curve, si recortas un rango suficientemente pequeño se puede aproximar por un plano. Por lo tanto, para la distancia infinitesimal entre dos puntos muy cercanos, el teorema de Pitágoras se puede usar directamente:
Cuando necesitas la distancia finita, solo tienes que sumar (integrar) esta distancia infinitesimal \(d\ell\) a lo largo del camino — es la misma idea que aproximar la longitud de un camino curvo como una suma de segmentos rectos cortos. Por eso, definir el invariante en forma de distancia infinitesimal \(d\ell\) es la escritura universal que también funciona en espacios curvados.
🔵 Kai: Entonces mi siguiente pregunta: ¿por qué el signo del término temporal es negativo? Si siguiéramos la misma idea que el caso espacial, parecería natural sumar todo con signo positivo: \(ds = \sqrt{(cdt)^2 + dx^2 + dy^2 + dz^2}\)...
🟡 Lina: Tienes razón. El porqué del signo negativo lo derivaremos a continuación a partir del principio de invariancia de la velocidad de la luz. Antes de eso, confirmemos algo: ¿por qué el invariante espaciotemporal se define en la forma cuadrática \(ds^2\) en lugar de la raíz cuadrada \(ds = \sqrt{\cdots}\) como en el espacio? Adelantando la conclusión, el invariante espaciotemporal tiene un signo negativo en el término temporal (la razón la derivaremos enseguida). Entonces el contenido de la raíz cuadrada puede ser negativo — y no se puede definir la raíz cuadrada de un número negativo en los números reales. Por eso, en el espaciotiempo definimos el invariante en la forma al cuadrado \(ds^2\), antes de tomar la raíz.
⚪ Mei: Ya veo, como hay casos en que no se puede tomar la raíz cuadrada, se define directamente al cuadrado. Es razonable.
Restringiendo la forma del invariante espaciotemporal¶
🟡 Lina: Veamos entonces por qué el signo del término temporal es negativo. La distancia infinitesimal en el espacio tridimensional era \(d\ell^2 = dx^2 + dy^2 + dz^2\). Al extender esto al espaciotiempo de 4 dimensiones, ¿qué forma tendrá? Lo restringiremos con dos condiciones.
Condición 1: Debe ser una "suma de cuadrados" de las coordenadas¶
🟡 Lina: Mirando la distancia tridimensional \(d\ell^2 = dx^2 + dy^2 + dz^2\), vemos que todo es una suma de cuadrados de las coordenadas. Al extender al espaciotiempo, asumiremos también la forma de suma de cuadrados de las coordenadas.
🔵 Kai: ¿Por qué la forma cuadrática?
🟡 Lina: Hay dos razones intuitivas. La primera es no depender de la dirección. Dije "cuadrado de la distancia infinitesimal", pero ¿qué pasaría si hipotéticamente en \(ds^2\) se mezclaran términos de primer orden — por ejemplo, un término como \(dx\)? Si te mueves una distancia \(d\ell\) en la dirección \((1, 0)\) (dirección positiva de \(x\)), la contribución del término de primer orden \(dx\) es \(+d\ell\). Pero si te mueves la misma distancia \(d\ell\) en la dirección \((-1, 0)\) (dirección negativa de \(x\)), la contribución es \(-d\ell\) — el signo cambia. Es decir, los términos de primer orden tienen dependencia direccional, por lo que no se incluyen en un invariante isotrópico. En cambio, \(dx^2 + dy^2\) (segundo orden) da el mismo valor \(d\ell^2\) tanto en la dirección \((+1, 0)\) como en \((-1, 0)\).
🔵 Kai: Efectivamente, como el teorema de Pitágoras tiene la forma \(dx^2 + dy^2\), la distancia se determina independientemente de la dirección.
🟡 Lina: La segunda razón es que los términos de orden 3 o superior son despreciables frente al segundo orden. Como estamos considerando el cuadrado de la distancia infinitesimal \(d\ell^2\), el orden más bajo de la expansión es segundo orden. ¿Qué pasaría si se mezclaran términos de tercer orden o superior (como \(dx^3\) o \(dx^2 \cdot dy\))? Pensemos concretamente. Cuando \(dx = 0.001\), \(dx^2 = 0.000001\), \(dx^3 = 0.000000001\). El término de tercer orden es solo una milésima del de segundo orden. Cuanto más pequeño sea \(dx\), más se amplía esta diferencia, así que aunque añadas correcciones de tercer orden o superior a la expresión cuadrática, desaparecen en el límite infinitesimal. En resumen, el primer orden no sirve (depende de la dirección), y el tercer orden o superior es despreciable frente al segundo en el límite infinitesimal — por eso queda el segundo orden.
⚪ Mei: Es decir, "el orden más bajo que no depende de la dirección" es el segundo — por eso el invariante es una combinación cuadrática.
🟡 Lina: Así es. También en el espaciotiempo de 4 dimensiones, asumimos que el invariante tiene la forma de suma de cuadrados de las coordenadas:
donde \(A, B, C, \ldots\) son coeficientes por determinar.
🔵 Kai: ¿También hay términos cruzados (el término con \(C\))?
🟡 Lina: En general sí podrían existir. Pero se eliminan con la siguiente condición 2.
Condición 2: La forma no cambia bajo rotaciones espaciales¶
🟡 Lina: Las leyes físicas son iguales en cualquier dirección del espacio — esto se llama isotropía (isotropy). Por lo tanto, el invariante debe mantener la misma forma sin importar cómo rotemos los ejes de coordenadas espaciales.
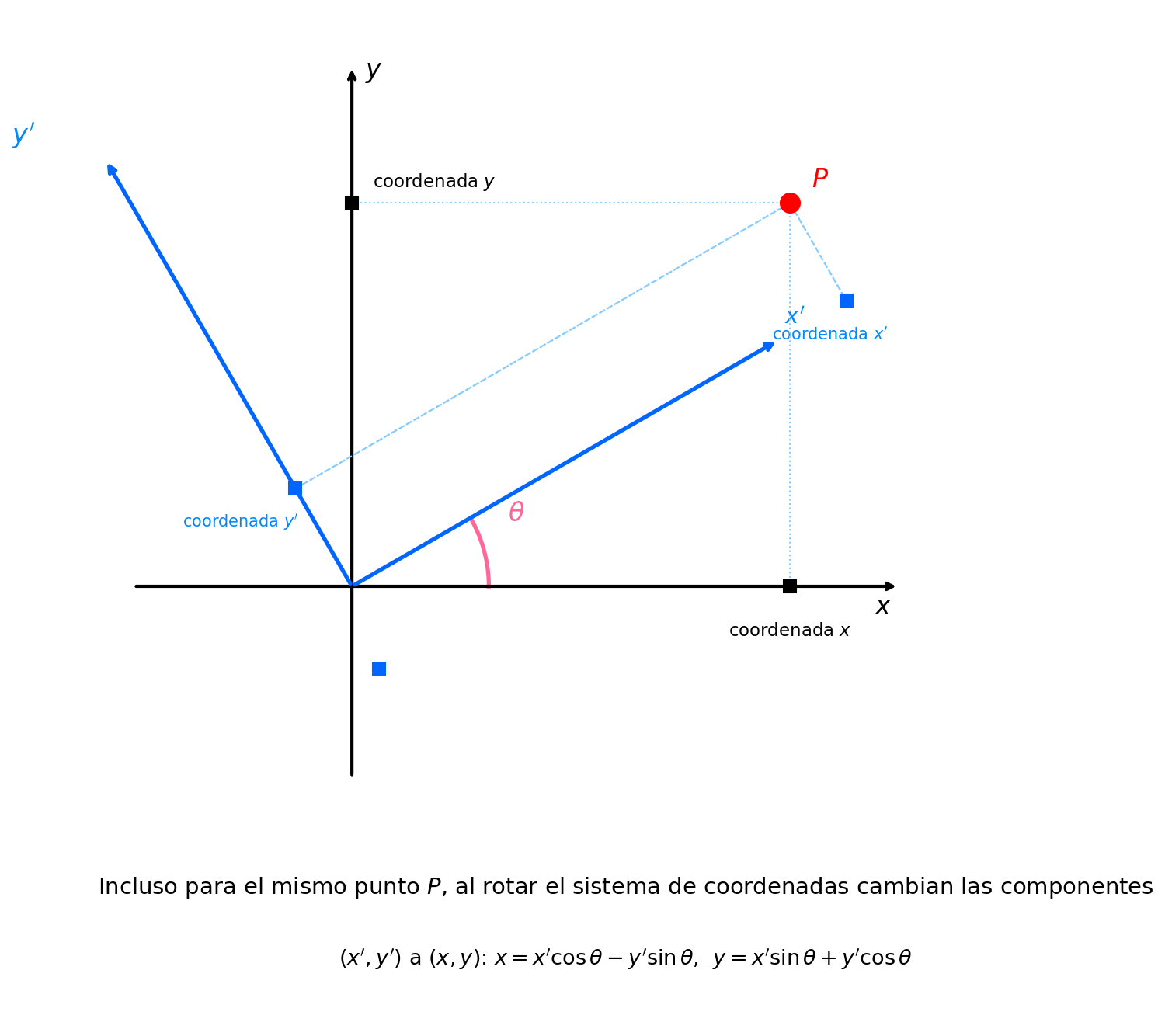
Fig. 3.3: Rotación de coordenadas en el plano xy y transformación de componentes. El mismo punto \(P\) tiene componentes diferentes cuando se rota el sistema de coordenadas un ángulo \(\theta\). Las coordenadas originales \((x, y)\) (negro) y las coordenadas rotadas \((x', y')\) (azul) están relacionadas por \(x = x'\cos\theta - y'\sin\theta\), \(y = x'\sin\theta + y'\cos\theta\) (forma de la transformación inversa).
Veámoslo concretamente. Consideremos nuevas coordenadas \((x', y')\) obtenidas rotando los ejes en el plano \(xy\) un ángulo \(\theta\) en sentido antihorario. Si las coordenadas de un punto \(P\) en los nuevos ejes son \((x', y')\), las coordenadas \((x, y)\) en los ejes originales están relacionadas por
Esto está escrito en la forma de la transformación inversa — "cuando se conocen las nuevas coordenadas \((x', y')\), obtener las coordenadas originales \((x, y)\)". ¿Por qué usamos la transformación inversa? Porque a continuación queremos reescribir \(dx\,dy\) en las nuevas coordenadas \((dx', dy')\) — la forma \(dx = (\cdots)dx' + (\cdots)dy'\) se puede usar directamente. Esta fórmula es exactamente la matriz de rotación que se estudia en Matemáticas III del bachillerato, y los \(\cos\theta\) y \(\sin\theta\) aparecen porque la proyección sobre los ejes rotados se expresa con funciones trigonométricas (mira Fig. 3.3「Rotación de coordenadas en el plano xy y transformación de componentes」). Para las cantidades infinitesimales \(dx, dy\) se cumple la misma forma. Si suponemos que un término cruzado \(dx\,dy\) estuviera incluido en el invariante, al expresarlo en las coordenadas rotadas:
Al expandir aparecen términos como \((\cos^2\theta - \sin^2\theta)\,dx'\,dy'\) y la forma resulta diferente del \(dx\,dy\) original.
⚪ Mei: Viola la condición de que "la forma sea igual bajo rotación". Por eso los términos cruzados como \(dx\,dy\) no están permitidos.
🟡 Lina: Por la misma razón, los términos cruzados entre tiempo y espacio como \((cdt)(dx)\) tampoco están permitidos, porque al rotar el espacio, \(dx\) se mezcla con \(dx'\) y \(dy'\) y la forma cambia.
En cambio, \(dx^2 + dy^2 + dz^2\) (suma de cuadrados espaciales) siempre vuelve a \(dx'^2 + dy'^2 + dz'^2\) bajo rotación — esto es precisamente la invariancia de la distancia tridimensional, una reformulación del teorema de Pitágoras. \((cdt)^2\) no contiene componentes espaciales, así que no cambia bajo rotaciones espaciales.
Al final, las únicas combinaciones cuadráticas que no cambian de forma bajo rotaciones espaciales son \(dx^2 + dy^2 + dz^2\) y \((cdt)^2\). Por lo tanto, el invariante se limita a la forma
Todos los términos cruzados desaparecen y solo quedan los coeficientes \(A\) y \(B\) — una forma limpia, ¿verdad?
⚪ Mei: Solo falta determinar esos \(A\) y \(B\).
🟡 Lina: Exacto.
✅ Verificación de comprensión: ¿Por qué el invariante espaciotemporal \(ds^2\) no contiene términos cruzados como \(dx\,dy\) o \((cdt)(dx)\)?
Respuesta
Por la isotropía del espacio (las leyes físicas son iguales en todas las direcciones), el invariante debe mantener la misma forma sin importar cómo se roten los ejes de coordenadas espaciales. Los términos cruzados como \(dx\,dy\) cambian de forma bajo rotaciones de coordenadas, violando la condición de isotropía. De manera similar, \((cdt)(dx)\) tampoco está permitido porque bajo rotaciones espaciales \(dx\) se mezcla.
El signo negativo se determina por la invariancia de la velocidad de la luz¶
🔵 Kai: ¿Cómo se determinan \(A\) y \(B\)?
🟡 Lina: Aquí usamos el principio de invariancia de la velocidad de la luz. Primero, consideremos el desplazamiento infinitesimal de la luz en un sistema inercial \(S\). La luz viaja a velocidad \(c\). La distancia que la luz recorre en el espacio tridimensional durante un tiempo infinitesimal \(dt\) es \(\sqrt{dx^2 + dy^2 + dz^2}\). Por otro lado, la distancia recorrida a velocidad \(c\) durante \(dt\) es \(c\,dt\). Como ambas son iguales:
Elevando ambos lados al cuadrado, el desplazamiento infinitesimal a lo largo de cualquier rayo de luz satisface
Sustituyendo esto en \(ds^2 = A\,(cdt)^2 + B\,(dx^2 + dy^2 + dz^2)\) obtenido en 「Restringiendo la forma del invariante espaciotemporal」:
⚪ Mei: Es decir, en el sistema \(S\), para la luz \(ds^2 = (A+B)\,c^2\,dt^2\).
🟡 Lina: A continuación, por el principio de invariancia de la velocidad de la luz, en otro sistema inercial \(S'\) la luz también viaja a la misma velocidad \(c\), así que en \(S'\) también se cumple
Y por el principio de relatividad, la forma de la definición del invariante es la misma en todos los sistemas inerciales — es decir, en \(S'\) también se escribe con los mismos coeficientes \(A, B\): \(ds'^2 = A\,(cdt')^2 + B\,(dx'^2 + dy'^2 + dz'^2)\) (si en el sistema \(S\) son \(A, B\) pero en \(S'\) fueran coeficientes diferentes, eso violaría "las mismas leyes físicas en cualquier sistema inercial"). Sustituyendo:
La misma forma que en \(S\), solo que \(dt\) se reemplaza por \(dt'\).
🔵 Kai: Hasta aquí obtenemos ecuaciones de la misma forma en ambos sistemas. Pero, ¿podemos decir que es un invariante? Si \(dt \neq dt'\), ¿no tendrán valores diferentes?
🟡 Lina: Exactamente ese es el siguiente punto. Nuestro objetivo es definir \(ds^2\) como un invariante que toma el mismo valor en todos los sistemas inerciales. Para ello, si para la luz \(ds^2 = 0\) en el sistema \(S\), entonces \(ds'^2 = 0\) también debe cumplirse en \(S'\). Sin embargo, mirando los resultados actuales: \(ds^2 = (A+B)\,c^2\,dt^2\) y \(ds'^2 = (A+B)\,c^2\,dt'^2\). Si \(A + B \neq 0\), para que \(ds^2 = ds'^2\) se cumpla necesitamos \((A+B)\,c^2\,dt^2 = (A+B)\,c^2\,dt'^2\), es decir, \(dt = dt'\).
🔵 Kai: Un momento, si \(dt = dt'\), eso es la transformación de Galileo — es decir, ¡tiempo absoluto!
🟡 Lina: Exacto. Organicemos aquí el flujo lógico. Lo que queremos mostrar ahora es que "\(A + B \neq 0\) conduce a una contradicción". Si \(A + B \neq 0\), entonces \(ds^2 = ds'^2\) requiere \(dt = dt'\) — pero \(dt = dt'\) (tiempo absoluto) contradice la invariancia de la velocidad de la luz. Por lo tanto \(A + B \neq 0\) es imposible, y la única opción es \(A + B = 0\). Veamos concretamente que "\(dt = dt'\) contradice la invariancia de la velocidad de la luz". Supongamos que \(dt = dt'\) (tiempo absoluto) se cumple. Si en el instante \(t = t' = 0\) los orígenes de ambos sistemas coinciden y se emite luz, en el sistema \(S\) el frente de onda en el instante \(t\) es una esfera de radio \(ct\) centrada en el origen de \(S\) — es decir, el conjunto de puntos equidistantes \(ct\) del origen de \(S\) en todas las direcciones. Por otro lado, para el observador del sistema \(S'\), la luz también partió de su origen (porque estaba en el origen en \(t' = 0\)). Por la invariancia de la velocidad de la luz, en \(S'\) la luz también se propaga a velocidad \(c\) en todas las direcciones, así que en \(S'\) el frente de onda debería ser una esfera de radio \(ct' = ct\) centrada en el origen de \(S'\) — el conjunto de puntos equidistantes \(ct\) del origen de \(S'\) en todas las direcciones.
🔵 Kai: Pero el origen de \(S'\) está desplazado \(vt\) respecto al origen de \(S\), ¿verdad? Que una misma esfera tenga dos centros es imposible...
🟡 Lina: Exacto. Como estamos asumiendo \(dt = dt'\), los sistemas \(S\) y \(S'\) comparten el mismo espacio en el mismo instante \(t\). El origen de \(S'\) está desplazado \(vt\) del origen de \(S\) (si \(v \neq 0\) entonces \(vt \neq 0\)). Aquí surge la contradicción: estamos diciendo que un mismo frente de onda (el mismo conjunto de puntos) está equidistante \(ct\) del origen de \(S\) y también equidistante \(ct\) del origen de \(S'\) en todas las direcciones. Piénsalo concretamente — si el frente de onda es una esfera centrada en el origen de \(S\), la distancia desde el origen de \(S'\) (desplazado \(vt\) del origen de \(S\)) hasta cada punto del frente debería variar según la dirección (lado cercano: \(ct - vt\), lado lejano: \(ct + vt\)). Es decir, no puede estar "equidistante \(ct\) en todas las direcciones" desde el origen de \(S'\). Sin embargo, el centro de una esfera es "el único punto equidistante de todos los puntos de la esfera" (no existe una esfera con dos centros), por lo que es imposible que el centro sean dos puntos separados por \(vt\). Por lo tanto, \(A + B \neq 0\) (es decir, la elección que requiere \(dt = dt'\)) no es compatible con la invariancia de la velocidad de la luz.
⚪ Mei: En cambio, si \(A + B = 0\), entonces \(ds^2 = 0\) y \(ds'^2 = 0\). Como ambos son cero, la invariancia está garantizada sin importar cuál sea la relación entre \(dt\) y \(dt'\).
🟡 Lina: Así es. Bajo la invariancia de la velocidad de la luz, la única elección compatible con cualquier relación \(dt\)-\(dt'\) es \(A + B = 0\) — este es el papel esencial que juega el principio de invariancia de la velocidad de la luz al determinar la forma de \(ds^2\). En una situación donde el tiempo absoluto no se cumple, para construir un invariante la única opción es elegir \(ds^2 = 0\) para la luz.
🔵 Kai: ¿Y si al contrario, no hubiera invariancia de la velocidad de la luz y se cumpliera la transformación de Galileo (\(dt = dt'\))?
🟡 Lina: En ese caso, \(ds^2 = (A+B)\,c^2\,dt^2\) sería un valor independiente del sistema inercial incluso con \(A + B \neq 0\) — los signos de \(A\) y \(B\) serían independientes y no surgiría la restricción \(A + B = 0\). El signo negativo no sería necesario. Es la invariancia de la velocidad de la luz lo que fuerza el signo negativo en \(ds^2\).
Punto lógico clave: Resumiendo la discusión hasta aquí: 1. La luz viaja a la misma velocidad \(c\) tanto en \(S\) como en \(S'\) (invariancia de la velocidad de la luz) 2. Para la luz: \(ds^2 = (A+B)\,c^2\,dt^2\), \(ds'^2 = (A+B)\,c^2\,dt'^2\) 3. La relación entre \(dt\) del sistema \(S\) y \(dt'\) del sistema \(S'\) aún no está determinada (no necesariamente \(dt = dt'\)) 4. Para que la invariancia (\(ds^2 = ds'^2\)) se cumpla independientemente de esta relación indeterminada, ambos lados deben ser cero → \(A + B = 0\)
⚪ Mei: Es decir, si elegimos \(A + B = 0\), entonces \(ds^2 = 0\) se cumple en cualquier sistema inercial para la luz — se convierte en un invariante. Por lo tanto \(A + B = 0\), es decir \(A = -B\).
🔵 Kai: Elegir \(ds^2 = 0\) para la luz era la única opción. La invariancia se garantiza aunque no conozcamos la relación entre \(dt\) y \(dt'\) — porque cero es cero. ...Pero al revés, cuando no es luz, \(ds^2 \neq 0\), ¿verdad? ¿Se puede seguir diciendo que es invariante en ese caso?
🟡 Lina: Buena pregunta. Eso lo demostraremos al final de esta sección. Primero determinemos el signo y la magnitud de \(B\). Como \(A = -B\), al determinar \(B\) también se determina \(A\) automáticamente. Tanto \(B > 0\) como \(B < 0\) son matemáticamente admisibles, pero si elegimos \(B > 0\), la parte espacial \(B(dx^2 + dy^2 + dz^2)\) es positiva — es decir, la distancia espacial es una cantidad positiva, y el término temporal es \(A = -B < 0\), negativo. Si eligiéramos \(B < 0\), la convención de signos sería \((+,-,-,-)\) y las conclusiones físicas serían las mismas. En cuanto a la magnitud, incluso si \(B \neq 1\), se puede volver a la forma \(B = 1\) redefiniendo la escala de las coordenadas — es decir, el valor de \(B\) se absorbe en la elección de unidades de las coordenadas. Por ejemplo, si \(B = 4\), redefiniendo la coordenada espacial de "1 metro" a "0.5 metros" (\(dx \to 2\,dx\)), tenemos \(B\,dx^2 = 4 \cdot dx^2 = (2dx)^2\), y con la nueva escala el coeficiente es 1. Así que lo que tiene significado físico es solo el signo, y elegimos \(B = 1\) (por lo tanto \(A = -1\)):
⚪ Mei: El signo negativo surge necesariamente de la condición de que "la velocidad de la luz es finita y constante". Resumiendo la explicación anterior — en la mecánica newtoniana, como \(dt = dt'\), la restricción \(A + B = 0\) no es necesaria y el invariante se puede construir solo con el espacio. Al aceptar la invariancia de la velocidad de la luz, el tiempo absoluto se derrumba, se necesita un invariante que trate tiempo y espacio juntos, y aparece la diferencia de signos.
🟡 Lina: Exacto. Esta es la razón por la que la geometría del espaciotiempo difiere fundamentalmente de la geometría euclidiana.
✅ Verificación de comprensión: ¿Por qué el término temporal tiene signo negativo en el intervalo espaciotemporal \(ds^2 = -(cdt)^2 + dx^2 + dy^2 + dz^2\)?
Respuesta
A partir del principio de invariancia de la velocidad de la luz, \(ds^2 = 0\) debe cumplirse en todos los sistemas inerciales para la luz. Para satisfacer esta condición es necesario que \(A + B = 0\) (es decir, los coeficientes del tiempo y el espacio deben tener signos opuestos).
🔍 Dive Deep: ¿Qué pasaría si la velocidad de la luz fuera diferente en cada sistema inercial?
Podrías pensar "¿No se puede derivar \(A + B = 0\) incluso si la velocidad de la luz no es constante?" Efectivamente, si en el sistema \(S'\) la velocidad de la luz fuera \(c'\), y definiéramos el invariante del sistema \(S'\) como \(ds'^2 = A\,(c'dt')^2 + B\,(dx'^2+dy'^2+dz'^2)\), para la luz \(ds'^2 = (A+B)\,c'^2\,dt'^2 = 0\) y \(A + B = 0\) se obtendría.
El problema está más adelante. Sustituyendo \(A + B = 0\) y \(B = 1\), en el sistema \(S\): \(ds^2 = -(cdt)^2 + dx^2+dy^2+dz^2\). Por el principio de relatividad, en \(S'\) debería cumplirse la misma forma, pero si la velocidad de la luz es \(c'\), entonces \(ds'^2 = -(c'dt')^2 + dx'^2+dy'^2+dz'^2\). Si \(c \neq c'\), la constante que aparece en la definición del invariante tendría un valor diferente en cada sistema inercial. Entonces no existiría "un invariante con la misma forma en todos los sistemas inerciales" — contradiciendo el principio de relatividad.
Solo cuando la velocidad de la luz es invariante (\(c = c'\)), la expresión \(ds^2 = -c^2\,dt^2 + dx^2+dy^2+dz^2\) sirve como una única expresión válida en todos los sistemas inerciales. La invariancia de la velocidad de la luz no es tanto "para derivar \(A + B = 0\)" sino más bien necesaria "para definir un intervalo espaciotemporal universal".
🟡 Lina: A este \(ds^2\) lo llamamos intervalo espaciotemporal (spacetime interval).
🔵 Kai: Pero esto lo derivamos del caso de la luz, ¿verdad? ¿Se puede usar también para objetos ordinarios que no son luz?
🟡 Lina: Buena pregunta. De hecho, se puede demostrar por separado que \(ds^2\) es un invariante independiente del sistema inercial también para casos distintos a la luz. Lo demostraremos al final de esta sección.
⚪ Mei: Para la luz, \(ds^2 = 0\). Y al cambiar de sistema inercial, \(ds'^2 = 0\) también. Es decir, \(ds^2\) es una cantidad que, al menos para la luz, no depende del sistema inercial — un invariante.
🟡 Lina: Exacto. Dije que \(ds^2\) es la cantidad que corresponde a "la distancia entre dos puntos en el espaciotiempo". Demos un nombre formal a estos "puntos en el espaciotiempo" — se llaman eventos (events). Usemos de nuevo el diagrama espaciotemporal presentado en la sección 3 de Cap. 2 — un espacio tridimensional \((ct, x, y)\) formado al añadir el eje temporal \(ct\) a las coordenadas espaciales \((x, y, z)\) (Fig. 3.4「Evento y cono de luz en un diagrama espaciotemporal」).
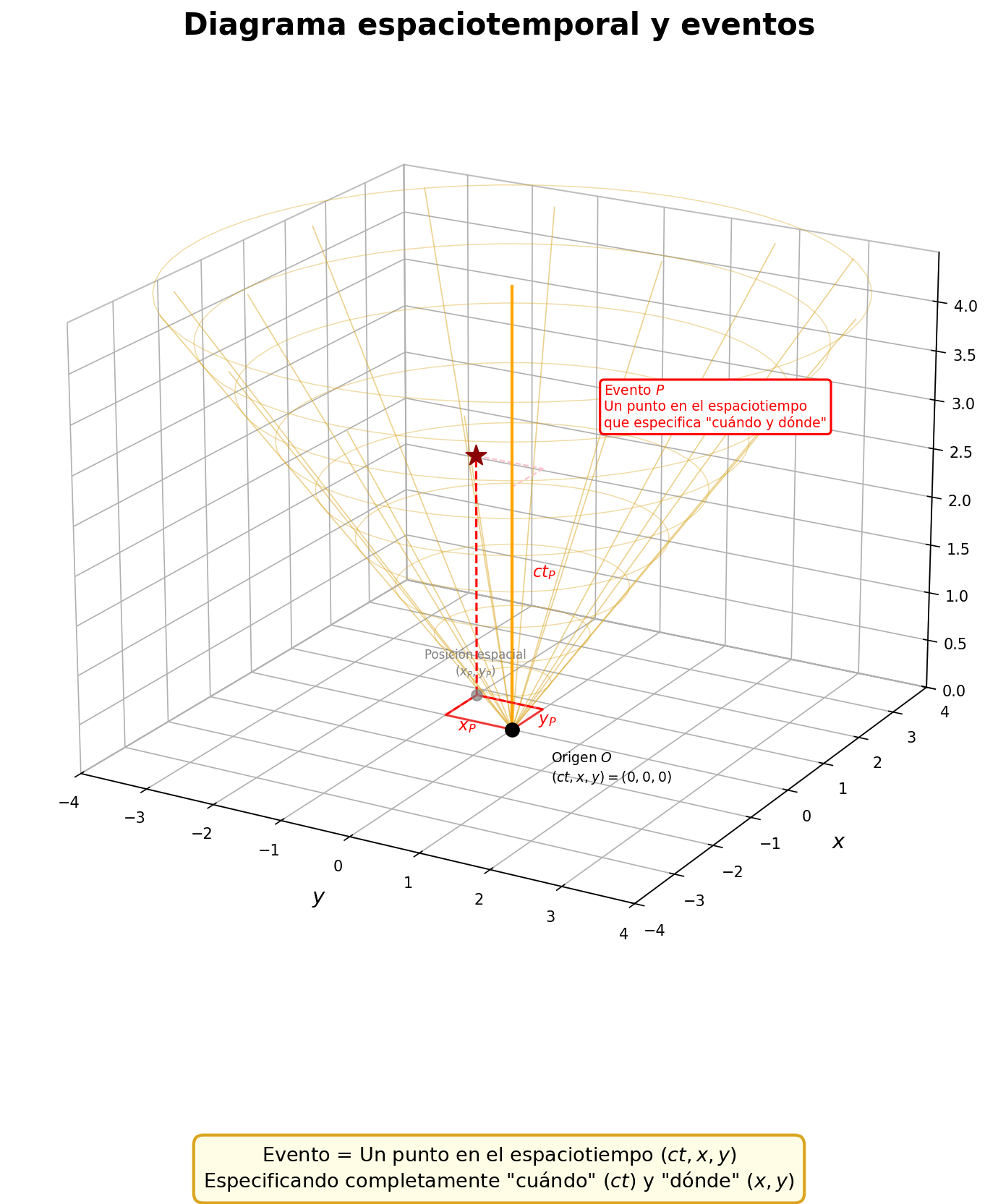
Fig. 3.4: Evento y cono de luz en un diagrama espaciotemporal. Diagrama espaciotemporal tridimensional \((ct, x, y)\). Los 2 ejes horizontales \((x, y)\) representan el espacio y el eje vertical \(ct\) representa el tiempo. El evento \(P\) es un punto en el espaciotiempo que especifica completamente "cuándo" (\(ct_P\)) y "dónde" (\(x_P, y_P\)). Las líneas amarillas son el cono de luz que parte del origen.
🔵 Kai: ¿"Evento" es diferente de la palabra cotidiana "suceso"?
🟡 Lina: En física, un evento es un punto en el espaciotiempo — es decir, una tupla \((t, x, y, z)\) que especifica "cuándo y dónde". Algo así como "30 de abril de 2026 a las 12:00, frente a la puerta de la estación de Tokio" — cuando el momento y el lugar están completamente especificados, eso es un evento. No tiene tamaño ni duración, es un punto matemático.
⚪ Mei: Los valores \((t, x, y, z)\) cambian según el sistema de coordenadas, pero el evento en sí — cuál punto del espaciotiempo es — no depende del sistema de coordenadas.
🟡 Lina: Exacto. El \(ds^2\) que acabamos de definir es la cantidad que corresponde a la "distancia espaciotemporal" entre dos eventos infinitesimalmente separados. Coloquemos un evento A en el origen y emitamos luz desde ahí. La luz avanza satisfaciendo \(ds^2 = 0\), así que en el diagrama espaciotemporal la trayectoria de la luz dibuja una superficie cónica que se expande a 45° desde el origen — esto se llama cono de luz (light cone). El cono de luz divide el espaciotiempo en 3 regiones (Fig. 3.5「Tres clasificaciones del intervalo espaciotemporal」). Según si el evento B está dentro o fuera del cono de luz, se determina su relación con A.
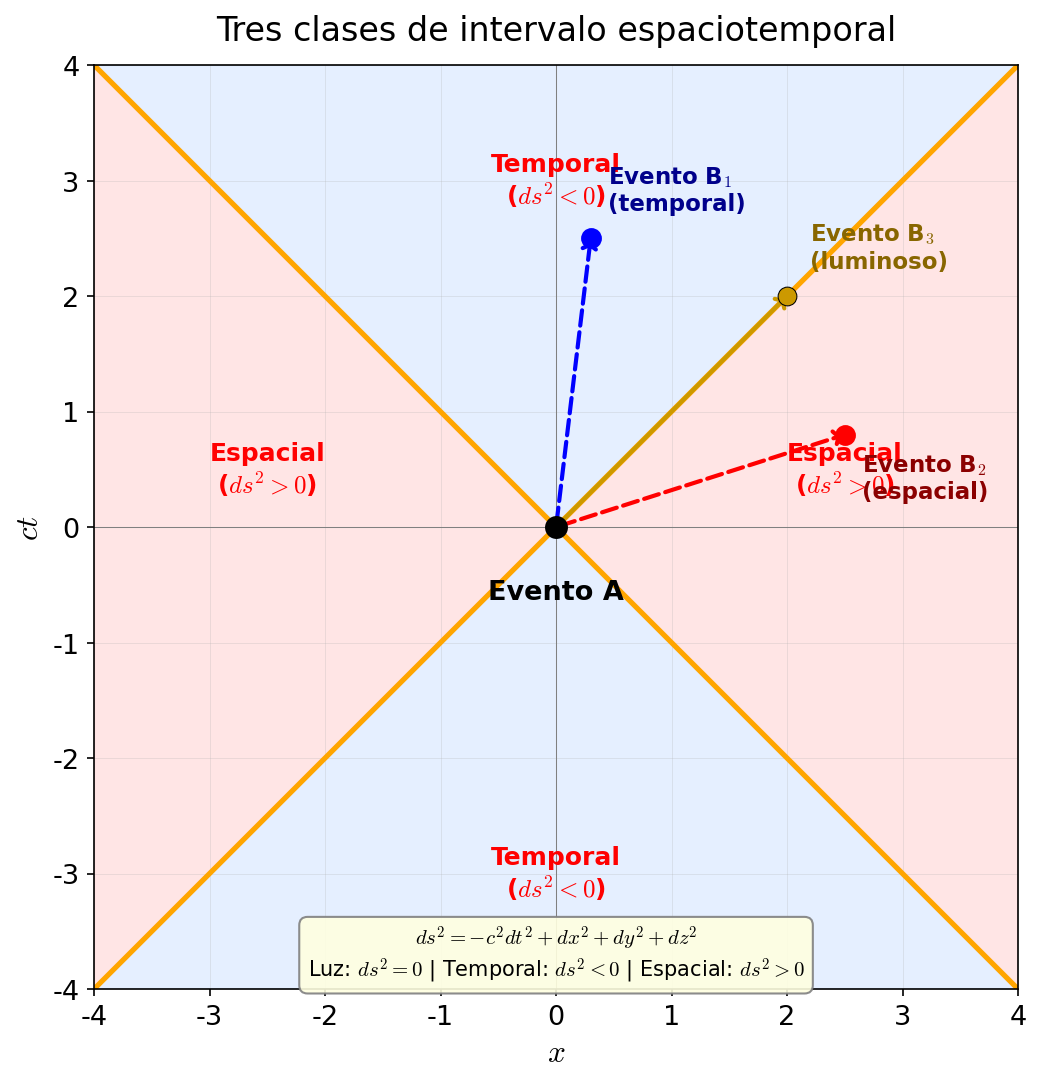
Fig. 3.5: Tres clasificaciones del intervalo espaciotemporal. Diagrama espaciotemporal con el evento A en el origen. El cono de luz (líneas amarillas, \(ds^2 = 0\)) divide el espaciotiempo en 3 regiones. El evento B₁ es de tipo temporal (\(ds^2 < 0\)), B₂ es de tipo espacial (\(ds^2 > 0\)), B₃ es de tipo luminoso (\(ds^2 = 0\)).
🟡 Lina: Esta clasificación en 3 tipos tiene un significado físico profundo. Aparece el término "relación causal", que significa "si un evento puede ser causa del otro" — es decir, si una señal o un objeto puede llegar de uno al otro.
Tabla 3.2: Tres clasificaciones del intervalo espaciotemporal y su significado físico
| Clasificación | Condición | Significado físico |
|---|---|---|
| Tipo temporal (timelike) | \(ds^2 < 0\) | Se puede viajar entre A y B a velocidad menor que la luz. Puede haber relación causal |
| Tipo luminoso (lightlike/null) | \(ds^2 = 0\) | A y B pueden conectarse con una señal luminosa. Sobre el cono de luz |
| Tipo espacial (spacelike) | \(ds^2 > 0\) | No se puede viajar entre A y B a velocidad igual o menor que la luz. No hay relación causal |
🔵 Kai: ¿Qué significa que no haya relación causal?
🟡 Lina: Dos eventos separados espacialmente no pueden ser alcanzados por ninguna señal de uno al otro. Por lo tanto, es imposible que uno sea causa del otro — eso es lo que significa "no hay relación causal". El cono de luz es "el límite de la región en la que se puede ejercer influencia causal".
🔵 Kai: Pero, ¿qué pasa con cosas que no son luz? Cuando \(ds^2 \neq 0\), ¿se puede seguir diciendo que \(ds^2 = ds'^2\)?
Demostración de que \(ds^2\) es invariante en todos los casos¶
Consejo de lectura: Esta sección es algo matemática y difícil. Basta con captar la esencia de la demostración para poder continuar. La conclusión es que "\(ds^2\) es un invariante independiente del sistema inercial en cualquier caso (incluidos objetos distintos a la luz)" — con eso en mente puedes leer las secciones siguientes sin problema.
🟡 Lina: Vamos a demostrarlo. El camino consta de tres pasos.
Camino de la demostración: 1. \(ds^2\) y \(ds'^2\) están relacionados por una "suma de cuadrados" de las coordenadas (una combinación cuadrática) 2. De la invariancia de la velocidad de la luz, cuando \(ds^2 = 0\) necesariamente \(ds'^2 = 0\). De esto se deduce una relación de proporcionalidad \(ds'^2 = a(v)\,ds^2\) 3. Conectando tres sistemas inerciales, se puede demostrar que el coeficiente de proporcionalidad \(a(v)\) es en realidad 1
Paso 1: \(ds'^2\) tiene la misma forma de "combinación cuadrática" que \(ds^2\)¶
🟡 Lina: Primero, consideremos la relación entre las coordenadas del sistema \(S\) \((t, x, y, z)\) y las del sistema \(S'\) \((t', x', y', z')\). La transformación entre sistemas inerciales es una expresión lineal en las coordenadas — es decir, de la forma \(t' = (\text{número})\cdot t + (\text{número})\cdot x + \ldots\).
🔵 Kai: ¿Por qué una expresión lineal?
🟡 Lina: Lo exige la homogeneidad del espaciotiempo — las leyes físicas son las mismas en cualquier lugar y momento. Intuitivamente, si la transformación fuera cuadrática — por ejemplo \(x' = ax^2 + bt\) — al desplazar el origen en \(x_0\), tendríamos \(x' = a(x+x_0)^2 + bt\) y aparecería un término lineal extra \(2ax_0 x\), haciendo que la forma de la transformación dependa de la elección del origen. Con expresiones lineales ese problema no surge — esto lo confirmaremos con más cuidado en 「Dos hipótesis」. Por ahora usemos esta conclusión para avanzar. Al multiplicar expresiones lineales entre sí se obtienen cuadráticas, así que al reescribir \(ds'^2 = -c^2 dt'^2 + dx'^2 + dy'^2 + dz'^2\) en las coordenadas originales \((dt, dx, dy, dz)\), resulta de nuevo una combinación cuadrática de las coordenadas — \(dt^2, dx^2, dt\,dx, \ldots\) y sus sumas.
⚪ Mei: Es decir, \(ds'^2\) es el mismo tipo de objeto matemático que \(ds^2\) — una combinación cuadrática de coordenadas — así que podemos compararlos directamente.
🟡 Lina: Exacto. Es decir, el intervalo espaciotemporal del sistema \(S'\), escrito en coordenadas del sistema \(S\), es
una combinación cuadrática de las coordenadas del sistema \(S\) (los coeficientes \(A', B', \ldots\) pueden diferir de \(A, B, \ldots\) del sistema \(S\)).
Paso 2: De la invariancia de la velocidad de la luz surge la relación de proporcionalidad¶
🟡 Lina: Tanto \(ds^2\) como \(ds'^2\) son combinaciones cuadráticas escribibles en las mismas coordenadas del sistema \(S\), \((dt, dx, dy, dz)\). Aquí usamos el principio de invariancia de la velocidad de la luz.
Cuando la luz se propaga, en el sistema \(S\) se cumple \(ds^2 = 0\). Por la invariancia de la velocidad de la luz, la velocidad de la luz en \(S'\) también es \(c\), así que para la misma propagación de la luz también se cumple \(ds'^2 = 0\). Es decir, para las variaciones de coordenadas \((dt, dx, dy, dz)\) que hacen \(ds^2\) cero, \(ds'^2\) también es necesariamente cero — el "conjunto de ceros" (conjunto donde se anulan) de ambas expresiones coincide.
🔵 Kai: ¿Solo porque el conjunto de ceros coincide se puede obtener la relación de proporcionalidad \(ds'^2 = a(v)\,ds^2\)?
🟡 Lina: Piénsalo con ecuaciones cuadráticas de una variable. \(f(x) = x^2 - 1\) y \(g(x) = 3x^2 - 3\) ambas se anulan en \(x = \pm 1\). De hecho, \(g(x) = 3 f(x)\) — difieren solo por un factor constante. En general, dos ecuaciones cuadráticas cuyos ceros coinciden difieren solo por un factor constante. ¿Por qué? Porque una ecuación cuadrática se factoriza como \(a(x - r_1)(x - r_2)\) (donde \(r_1, r_2\) son las raíces). Si las raíces \(r_1, r_2\) son las mismas, la única diferencia es el coeficiente principal \(a\) — es decir, solo hay libertad en un factor constante.
🔵 Kai: Para una variable lo entiendo, pero ¿se puede decir lo mismo con múltiples variables? Con más variables hay más libertad en los coeficientes, así que parece que habría más posibilidades...
🟡 Lina: Intuitivamente piénsalo así. Veámoslo concretamente con 2 variables. El conjunto de ceros de \(f = x^2 - y^2\) — es decir, el conjunto de puntos \((x, y)\) que satisfacen \(f = 0\) — es \(x = \pm y\), es decir, 2 rectas que se extienden no solo en el origen sino de forma extensa. Si otra expresión cuadrática \(g = ax^2 + bxy + cy^2\) tiene el mismo conjunto de ceros (se anula en \(x = \pm y\)), sustituyendo \(x = y\) obtenemos \(a + b + c = 0\), y sustituyendo \(x = -y\) obtenemos \(a - b + c = 0\). De estas 2 ecuaciones se deduce \(b = 0\) y \(c = -a\), es decir \(g = a(x^2 - y^2) = a \cdot f\). Cuando el conjunto de ceros se extiende en forma de superficie, se puede usar información de todas las direcciones, y \(g\) queda limitada a ser un múltiplo constante de \(f\).
Inversamente, si \(f = x^2 + y^2\) con todo positivo, la única solución de \(f = 0\) es el origen \((0, 0)\). Con la información de un solo punto solo se puede decir "\(g\) también es cero en el origen", y \(g = 2x^2 + 3y^2\) con razón de coeficientes libre también satisface la condición.
⚪ Mei: ¡Ah, por eso importa el signo negativo de \(ds^2\)! Precisamente porque tiene signo indefinido, el conjunto de ceros se extiende y se fuerza la relación de proporcionalidad.
🟡 Lina: Así es. De esta manera, una expresión cuadrática donde se mezclan términos positivos y negativos — por ejemplo, como \(x^2 - y^2\), donde coexisten términos con signo positivo y negativo — se llama forma cuadrática de signo indefinido (indefinite quadratic form). Aquí "forma cuadrática" significa una expresión compuesta solo por cuadrados de variables y productos entre variables (como \(ax^2 + bxy + cy^2\)). "Signo indefinido" significa que según los valores de las variables puede ser positiva, negativa o cero. En las formas cuadráticas de signo indefinido, el conjunto de puntos donde se anula (conjunto de ceros) no es solo el origen sino que tiene extensión — para \(x^2 - y^2 = 0\), el conjunto de puntos que se anulan son las 2 rectas completas \(x = \pm y\). Gracias a esta "extensión", hay abundantes puntos disponibles para sustituir, y otra expresión cuadrática con el mismo conjunto de ceros queda limitada a ser un múltiplo constante. \(ds^2 = -(ct)^2 + x^2 + y^2 + z^2\) es exactamente de esta forma — el término temporal es negativo y los espaciales positivos, así que es una forma cuadrática de signo indefinido.
La extensión a 4 variables sigue el mismo principio. Con 2 variables el conjunto de ceros eran 2 rectas, y solo con sustituir ahí se determinaban todos los coeficientes. Con 4 variables el conjunto de ceros es el cono de luz — una "superficie" tridimensional — así que hay aún más puntos disponibles para sustituir y los coeficientes quedan más restringidos. Concretamente, la misma técnica de sustituir pares con solo el signo cambiado como \((1, 1, 0, 0)\) y \((1, -1, 0, 0)\) para eliminar términos cruzados en 2 variables, se usa igual en 4 variables — en el cono de luz hay infinitos pares como \((1, 1, 0, 0)\) y \((1, -1, 0, 0)\) que difieren solo en signo, y sustituyéndolos y restando se demuestra que los coeficientes de los términos cruzados son cero. En el desplegable de abajo se verifica concretamente, pero lo que se hace es lo mismo que con 2 variables — "sustituir puntos del conjunto de ceros y resolver el sistema de ecuaciones para los coeficientes".
Verificación concreta con 4 variables (se puede saltar):
El conjunto de ceros de \(f = -t^2 + x^2 + y^2 + z^2\) es \(t^2 = x^2 + y^2 + z^2\) (cono de luz). Fijando \(t = 1\), los puntos del conjunto de ceros satisfacen \(x^2 + y^2 + z^2 = 1\) — es decir, todos los puntos de la esfera unitaria tridimensional están en el conjunto de ceros. Por ejemplo \((1, 1, 0, 0)\), \((1, -1, 0, 0)\), \((1, 0, 1, 0)\), \((1, 0, -1, 0)\), \((1, 0, 0, 1)\), \((1, 1/\sqrt{2}, 1/\sqrt{2}, 0)\) etc., infinitos puntos disponibles.
Si otra expresión cuadrática \(g = At^2 + Bx^2 + Cy^2 + Dz^2 + Etx + Fty + \ldots\) (incluyendo términos cruzados) es cero en todos estos puntos, se pueden determinar los coeficientes de los términos cruzados. La técnica es "sustituir pares de puntos que difieren solo en signo y restar". ¿Por qué la resta elimina los términos cruzados? Porque el término cruzado \(Etx\) es el producto de \(t\) y \(x\), así que al invertir el signo de \(x\), solo cambia el signo de \(Etx\), mientras que los términos \(t^2\) y \(x^2\) no cambian. Veámoslo concretamente. Sustituyendo \((1,1,0,0)\): \(A \cdot 1 + B \cdot 1 + E \cdot 1 \cdot 1 = A + B + E = 0\). Luego sustituyendo \((1,-1,0,0)\) donde solo se invierte el signo de \(x\): \(A \cdot 1 + B \cdot 1 + E \cdot 1 \cdot (-1) = A + B - E = 0\). Restando estas 2 ecuaciones: \((A+B+E) - (A+B-E) = 2E = 0\), es decir \(E = 0\) (el coeficiente del término cruzado \(tx\) es cero). La parte \(A + B\) es igual en ambas ecuaciones así que se cancela en la resta, y solo queda \(E\) — este es el mecanismo de "usar pares para aislar los términos cruzados". Con la misma técnica, de \((1,0,1,0)\) y \((1,0,-1,0)\) se obtiene \(F = 0\) (término cruzado \(ty\)). Los términos cruzados \(xy\) se eliminan igual. Si \(g\) tiene un término cruzado \(Gxy\), sustituyendo \((1, 1/\sqrt{2}, 1/\sqrt{2}, 0)\) la contribución es \(G \cdot (1/\sqrt{2})(1/\sqrt{2}) = G/2\), y sustituyendo \((1, 1/\sqrt{2}, -1/\sqrt{2}, 0)\) la contribución es \(G \cdot (1/\sqrt{2})(-1/\sqrt{2}) = -G/2\). Restando las 2 ecuaciones se obtiene \(G = 0\) — así todos los términos cruzados resultan cero.
Para los términos diagonales, del hecho de que \((1,1,0,0)\) y \((1,0,1,0)\) estén ambos en el conjunto de ceros se obtiene \(A + B = 0\) y \(A + C = 0\), luego \(B = C\). Igualmente se muestra \(C = D\), así que \(B = C = D\). Al final \(g = A(-t^2 + x^2 + y^2 + z^2) = (-A) \cdot f\) — queda limitada a ser un múltiplo constante de \(f\).
Conclusión hasta aquí: En formas cuadráticas de signo indefinido cuyo conjunto de ceros se extiende en forma de superficie, otra forma cuadrática con el mismo conjunto de ceros solo puede diferir por un factor constante. También con 4 variables, la "sustitución de pares → resta" determina todos los coeficientes.
Repitiendo sustituciones como en el caso de 2 variables se demuestra que todos los coeficientes de \(g\) están limitados a ser un múltiplo constante de \(f\). La demostración rigurosa se remite a los libros de texto de álgebra lineal, pero en conclusión
se cumple esta relación de proporcionalidad. \(v\) es la magnitud de la velocidad relativa entre los dos sistemas inerciales, y \(a(v)\) es el coeficiente de proporcionalidad.
🔵 Kai: ¿El coeficiente \(a\) depende también de la dirección de la velocidad?
🟡 Lina: Buena pregunta. Recuerda la isotropía del espacio — las leyes físicas son iguales en todas las direcciones. Si \(a\) dependiera de la dirección del vector velocidad \(\vec{v}\), el valor de \(ds'^2\) cambiaría según si te mueves en una dirección u otra. Eso contradiría la isotropía. Por lo tanto, \(a\) es función solo de la magnitud \(v = |\vec{v}|\) de la velocidad.
⚪ Mei: Entendido, \(a = a(v)\).
🟡 Lina: Con esto el paso 2 está completo. Queda el paso 3 — mostrar que \(a(v) = 1\).
Paso 3: Conectando tres sistemas inerciales se obtiene \(a(v) = 1\)¶
🟡 Lina: Consideremos tres sistemas inerciales \(S_1\), \(S_2\), \(S_3\). Desde \(S_1\) se ve que \(S_2\) se mueve con velocidad \(\vec{v}_1\) (rapidez \(v_1\)), y desde \(S_2\) se ve que \(S_3\) se mueve con velocidad \(\vec{v}_2\) (rapidez \(v_2\)).
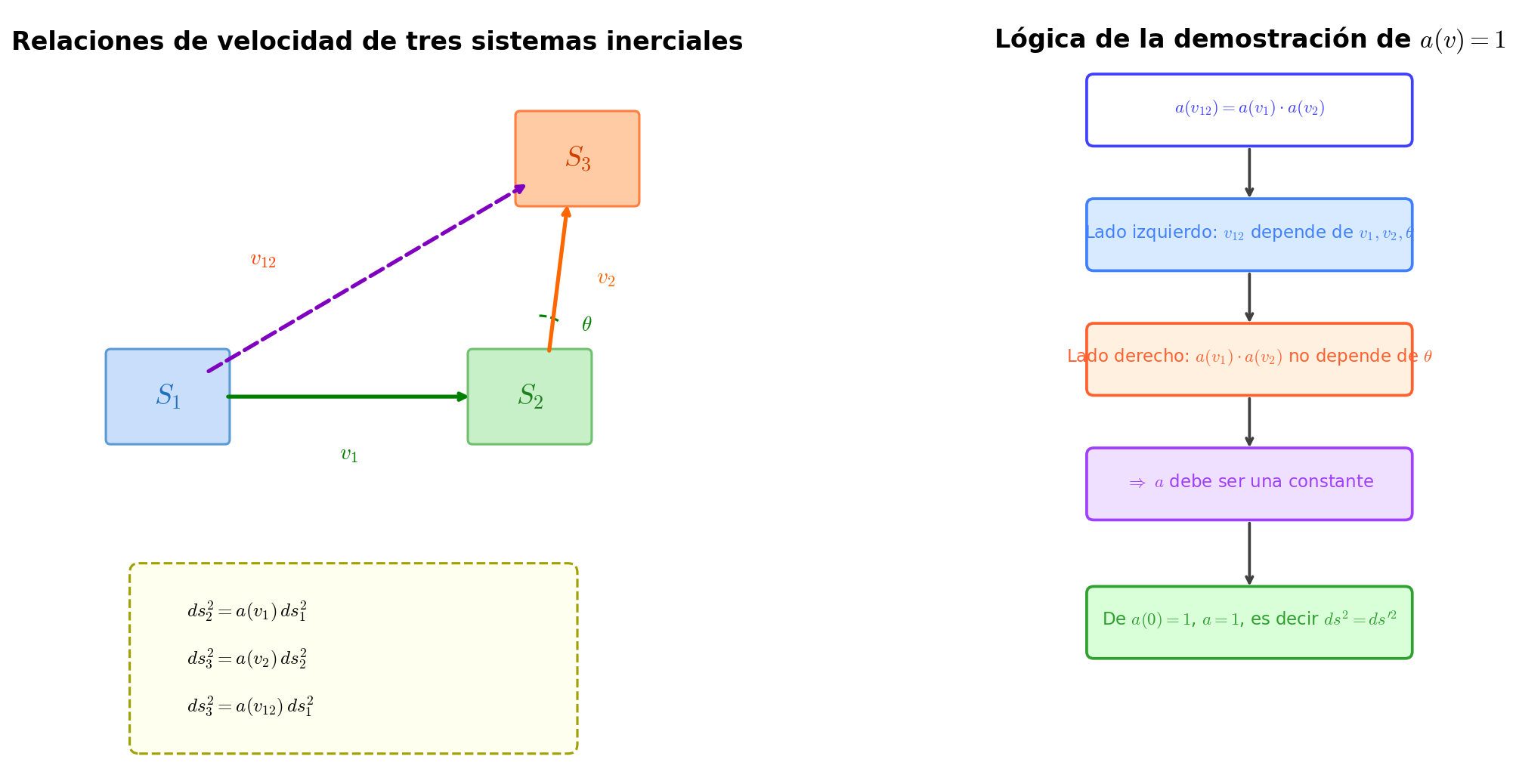
Fig. 3.6: Composición de velocidades de sistemas inerciales y demostración de invariancia. Izquierda — Relación de velocidades de los 3 sistemas inerciales \(S_1, S_2, S_3\). El ángulo \(\theta\) entre la velocidad \(\vec{v}_1\) de \(S_1\) a \(S_2\) y la velocidad \(\vec{v}_2\) de \(S_2\) a \(S_3\) afecta la velocidad compuesta \(v_{12}\). Derecha — El lado izquierdo de \(a(v_{12}) = a(v_1) \cdot a(v_2)\) depende de \(\theta\) pero el derecho no, por lo que \(a\) debe ser constante, y de \(a(0) = 1\) se deduce \(a = 1\).
🟡 Lina: Aplicando la relación de proporcionalidad del paso 2 entre cada par de sistemas inerciales:
- \(S_1 \to S_2\): \(ds_2^2 = a(v_1)\,ds_1^2\)
- \(S_2 \to S_3\): \(ds_3^2 = a(v_2)\,ds_2^2\)
Combinando ambas:
Por otro lado, transformando directamente de \(S_1\) a \(S_3\), con \(v_{12}\) siendo la rapidez de \(S_3\) vista desde \(S_1\):
Como ambas expresiones representan el mismo \(ds_3^2\):
🔵 Kai: \(v_{12}\) es la rapidez de \(S_3\) vista desde \(S_1\), ¿verdad? Pero eso no depende solo de las magnitudes \(v_1\) y \(v_2\), sino también de la relación de orientación — el ángulo \(\theta\) — entre \(\vec{v}_1\) y \(\vec{v}_2\).
🟡 Lina: Exacto. Por ejemplo, si \(v_1 = v_2 = 0.5c\), cuando \(\vec{v}_1\) y \(\vec{v}_2\) tienen la misma dirección (\(\theta = 0\)), \(v_{12}\) es grande; cuando son perpendiculares (\(\theta = \pi/2\)), es del orden de \(\sqrt{v_1^2 + v_2^2}\); y cuando son opuestas (\(\theta = \pi\)), se acerca a 0. \(v_{12}\) depende de \(v_1, v_2, \theta\).
Ahora miremos de nuevo la ecuación \(a(v_{12}) = a(v_1)\cdot a(v_2)\).
⚪ Mei: El lado izquierdo depende de \(\theta\) (porque \(v_{12}\) depende de \(\theta\)), pero el lado derecho no contiene \(\theta\) en absoluto (se determina solo por \(v_1\) y \(v_2\)).
🟡 Lina: Ese es el punto decisivo. El lado derecho \(a(v_1) \cdot a(v_2)\) no contiene \(\theta\) — se determina solo con \(v_1\) y \(v_2\), es una constante. Por otro lado, el lado izquierdo \(a(v_{12})\) puede variar a través de \(\theta\). Pero si lado izquierdo = lado derecho se cumple para cualquier \(\theta\), el lado izquierdo también debe ser una constante independiente de \(\theta\).
🔵 Kai: Es decir, sin importar qué valor tome \(v_{12}\), \(a(v_{12})\) devuelve el mismo valor... ¿eso significa que \(a\) es una función constante?
🟡 Lina: Buena pregunta. Dicho con más cuidado: fijando \(v_1\) y \(v_2\) y variando \(\theta\) (el ángulo entre \(\vec{v}_1\) y \(\vec{v}_2\)) de \(0\) a \(\pi\) continuamente, \(v_{12}\) también varía continuamente desde un valor mínimo hasta un máximo. Por ejemplo, cuando \(\vec{v}_1\) y \(\vec{v}_2\) tienen la misma dirección (\(\theta = 0\)) la velocidad compuesta es máxima, y cuando son opuestas (\(\theta = \pi\)) es mínima — si \(v_1\) y \(v_2\) son ambas distintas de cero, el máximo y el mínimo son diferentes.
🔵 Kai: Es decir, al variar \(\theta\), \(v_{12}\) cambia continuamente... pero ¿por qué se puede decir "continuamente"?
🟡 Lina: Porque la transformación entre sistemas inerciales es una expresión lineal en las coordenadas (la linealidad confirmada en el paso 1), la composición de dos transformaciones lineales es también una transformación lineal, y sus coeficientes son polinomios de los coeficientes de las transformaciones originales — por lo tanto funciones continuas. Es decir, al cambiar \(\theta\) un poco, \(v_{12}\) también cambia solo un poco (la fórmula concreta de composición de velocidades y su dependencia en \(\theta\) se pueden verificar en el ejercicio → Problema M-5. Derivación de la regla de composición de velocidades).
Lo importante es que al variar \(\theta\), \(v_{12}\) toma no un solo valor, sino un rango. Si \(a\) no fuera constante, al cambiar el valor de \(v_{12}\), \(a(v_{12})\) también cambiaría — pero el lado derecho es una constante independiente de \(\theta\), así que eso sería imposible.
⚪ Mei: Es decir, \(a\) es constante en ese rango.
🟡 Lina: Así es. Concretamente, fijando \(v_1\) y \(v_2\) y variando \(\theta\) de \(0\) a \(\pi\), \(v_{12}\) cambia continuamente desde un valor mínimo hasta un máximo (en la transformación de Galileo, cuando \(\vec{v}_1\) y \(\vec{v}_2\) son opuestas (\(\theta = \pi\)), \(v_{12} = |v_1 - v_2|\) (mínimo), y cuando tienen la misma dirección (\(\theta = 0\)), \(v_{12} = v_1 + v_2\) (máximo) — en relatividad hay una corrección, pero en cualquier caso si \(v_1, v_2 > 0\), el mínimo y el máximo son diferentes). En ese rango \(a\) es constante — es decir, \(a\) solo toma un valor.
Luego, si reemplazamos \(v_1\) o \(v_2\) por otros valores y repetimos el mismo argumento, el rango que \(v_{12}\) barre cambia. Por ejemplo, fijando \(v_2 = 0.3c\) y cambiando \(v_1\) a \(0.1c, 0.5c, 0.9c, \ldots\), para cada \(v_1\) el rango de \(v_{12}\) al variar \(\theta\) es diferente.
🔵 Kai: Es decir, probando distintos valores de \(v_1\), podemos ir ampliando el rango de valores que puede tomar \(v_{12}\).
🟡 Lina: Exacto. Concretamente, con \(v_1 = 0.1c\), \(v_2 = 0.3c\), al variar \(\theta\), \(v_{12}\) toma valores aproximadamente de \(0.2c\) a \(0.4c\); con \(v_1 = 0.9c\), \(v_2 = 0.3c\), \(v_{12}\) toma valores aproximadamente de \(0.8c\) a \(0.95c\) — así, al cambiar \(v_1\) el rango de \(v_{12}\) se desplaza, y en total se cubre casi todo el intervalo \([0, c)\). La región cercana a cero de \(v_{12}\) también se puede realizar con \(v_1 \approx v_2\) en dirección opuesta (\(\theta = \pi\)), así que también se cubre la vecindad del extremo inferior de \([0, c)\). En las partes solapadas, los valores de \(a\) deben coincidir — porque \(a\) es "una función que dado un valor de rapidez \(v\) devuelve un único valor", no puede devolver dos valores diferentes para el mismo \(v_{12}\). Si en un rango \(a\) es constante, y en el rango adyacente también es constante, y además en la parte solapada los valores coinciden, entonces en ambos rangos juntos \(a\) es la misma constante. Repitiendo esto, \(a\) es la misma constante en todo el rango \([0, c)\). Además, cuando \(v = 0\) (mismo sistema inercial, es decir, sin transformación), \(ds'^2 = ds^2\) así que \(a(0) = 1\). Si es constante y \(a(0) = 1\), entonces \(a = 1\).
🟡 Lina: Es decir,
Incluyendo los casos distintos a la luz, el intervalo espaciotemporal \(ds^2\) es un invariante que toma el mismo valor en todos los sistemas inerciales — esto es lo que queríamos demostrar.
⚪ Mei: La misma estructura que "la distancia \(dx^2 + dy^2\) es invariante bajo rotaciones espaciales" existe también en el espaciotiempo. La diferencia decisiva es el signo negativo del término temporal.
🟡 Lina: Exacto. Este es el núcleo geométrico de la relatividad especial.
✅ Verificación de comprensión: En la demostración de que \(ds^2\) es invariante también para casos distintos a la luz, ¿cuál es el factor decisivo para que se deduzca \(a(v) = 1\)?
Respuesta
Conectando tres sistemas inerciales \(S_1, S_2, S_3\) se obtiene \(a(v_{12}) = a(v_1) \cdot a(v_2)\). El \(v_{12}\) del lado izquierdo depende del ángulo \(\theta\) entre \(\vec{v}_1\) y \(\vec{v}_2\), pero el lado derecho no contiene \(\theta\). Para que esta igualdad se cumpla para cualquier \(\theta\), \(a\) debe ser constante, y de \(a(0) = 1\) (cuando es el mismo sistema inercial no se transforma) se concluye \(a = 1\).
✅ Verificación de comprensión: De las 3 clasificaciones del intervalo espaciotemporal \(ds^2\) según su signo, ¿cómo se llama el caso \(ds^2 < 0\) y qué significa físicamente?
Respuesta
Se llama tipo temporal (timelike). Significa que se puede viajar entre los dos eventos a velocidad menor que la luz, y puede haber relación causal.
Nota sobre la convención de signos: En este capítulo adoptamos la convención de signos \(ds^2 = -c^2\,dt^2 + dx^2 + dy^2 + dz^2\), es decir \((-,+,+,+)\). Algunos libros de texto usan la convención opuesta \((+,-,-,-)\), pero las conclusiones físicas son las mismas. Conviene adquirir el hábito de verificar siempre qué convención usa la referencia que estés leyendo.
Convenciones de las referencias: Entre las referencias de este Relatividad General, Tong, Schutz, Lancaster & Blundell usan la misma \((-,+,+,+)\) que este Relatividad General. En cambio, Hartle, el libro de Ishii y el libro de Sato usan la convención opuesta \((+,-,-,-)\). Al consultar estos libros, ten en cuenta que los signos de \(ds^2\) y \(\eta_{\mu\nu}\) están invertidos.
3.3 Derivación de la transformación de Lorentz¶
🟡 Lina: En la sección 2 obtuvimos el invariante \(ds^2\) — un tensor de rango 0. Al final de Cap. 2 anuncié que "lo siguiente son los tensores de rango 1 (4-vectores)".
🔵 Kai: Sí. ¿Seguimos con los tensores de rango 1?
🟡 Lina: Antes de eso hay algo que quiero hacer. El invariante en la mecánica newtoniana — la distancia \(d\ell^2 = dx^2 + dy^2 + dz^2\) — era invariante bajo la transformación de Galileo (cambio a un sistema inercial en movimiento rectilíneo uniforme). Entonces, el invariante \(ds^2\) derivado en la sección 2, ¿bajo qué transformación es invariante? Resumamos el panorama general en una tabla.
Tabla 3.3: Correspondencia entre invariantes y transformaciones de coordenadas por sistema mecánico
| Mecánica newtoniana | Relatividad especial (este capítulo) | Relatividad general | ||
|---|---|---|---|---|
| Transformación de coordenadas | Transformación de Galileo | Transformación de Lorentz ← Sección 3 | Transformación general de coordenadas | |
| Invariante | Tensor de rango 0 (escalar) | Distancia \(d\ell^2 = dx^2+dy^2+dz^2\) | Intervalo espaciotemporal \(ds^2\) ← Introducido en la sección 2 | \(ds^2 = g_{\mu\nu}\,dx^\mu dx^\nu\) |
| Tensor de rango 1 (vector) | Posición \(\vec{r}\), velocidad \(\vec{v}\), fuerza \(\vec{F}\) | 4-velocidad \(U^\mu\) ← Cap. 4 | 4-vector \(V^\mu\) | |
| Tensor de rango 2 (métrica) | \(\delta_{ij}\) (métrica euclidiana, 1 si \(i=j\), 0 si \(i\neq j\)) | Métrica de Minkowski \(\eta_{\mu\nu}\) ← Cap. 4 | Métrica \(g_{\mu\nu}\) (campo dinámico) |
⚪ Mei: La columna de la mecánica newtoniana es familiar, así que al compararla se ve qué cambia en la relatividad especial. Y la columna de la relatividad general es el objetivo final.
🟡 Lina: Así que vamos a formular la transformación de Lorentz — la transformación que deja invariante el intervalo espaciotemporal \(ds^2\).
✅ Verificación de comprensión: ¿Cuál es la combinación de invariante y transformación de coordenadas en la mecánica newtoniana? ¿Cómo cambia en la relatividad especial?
Respuesta
En la mecánica newtoniana el invariante es la distancia espacial \(d\ell^2 = dx^2 + dy^2 + dz^2\) y la transformación que lo preserva es la transformación de Galileo. En la relatividad especial el invariante pasa a ser el intervalo espaciotemporal \(ds^2 = -(cdt)^2 + dx^2 + dy^2 + dz^2\) y la transformación que lo preserva pasa a ser la transformación de Lorentz.
Planteamiento del problema — expresar el cambio de sistema inercial con una fórmula¶
🟡 Lina: Primero dejemos claro qué representa físicamente la transformación de Lorentz.
Consideremos dos sistemas inerciales \(S\) y \(S'\). \(S'\) se mueve a velocidad constante \(\vec{v}\) respecto a \(S\). Supongamos que en \(t = t' = 0\) los orígenes de ambos sistemas coincidían.
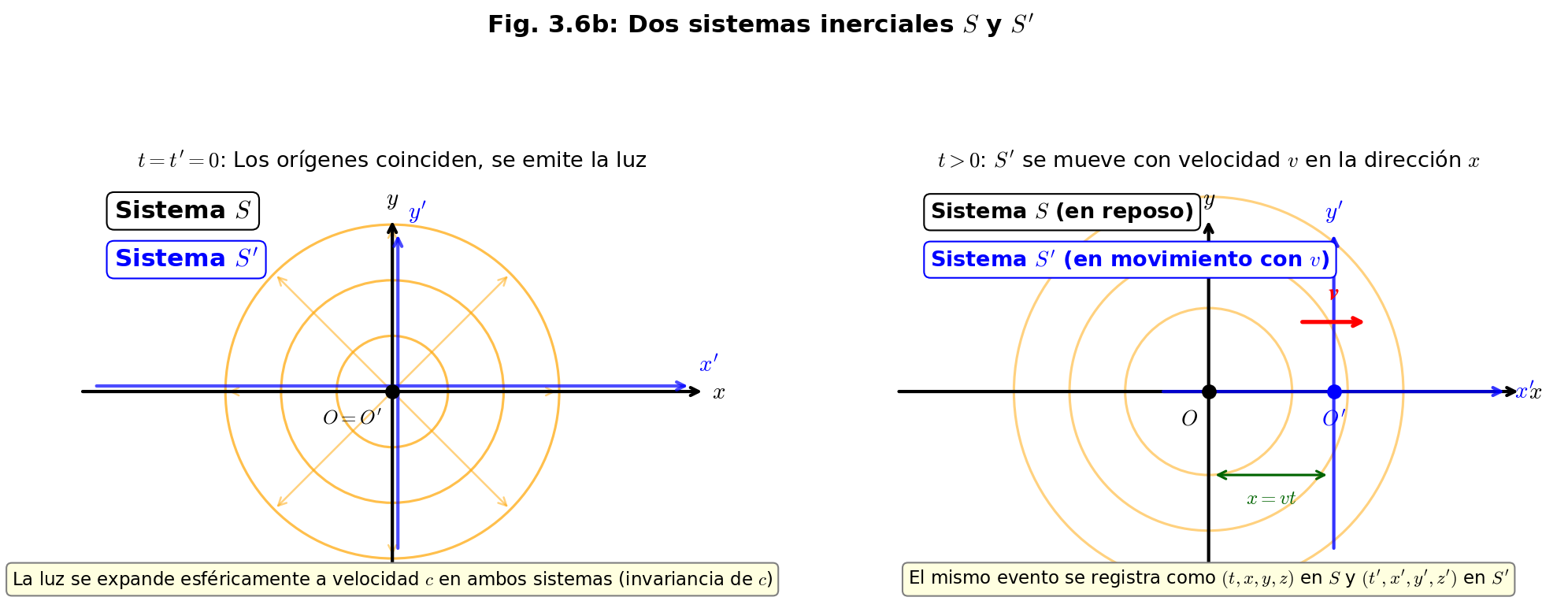
Fig. 3.7: Dos sistemas inerciales y el principio de invariancia de la velocidad de la luz. Sistemas inerciales \(S\) y \(S'\). \(S'\) se mueve a velocidad \(v\) en la dirección \(x\) respecto a \(S\). En \(t=t'=0\) los orígenes de ambos sistemas coinciden y en ese instante se emite luz desde el origen. El frente de onda de la luz se expande esféricamente visto desde cualquiera de los dos sistemas (principio de invariancia de la velocidad de la luz).
Un mismo evento (punto del espaciotiempo) es registrado por el observador de \(S\) con coordenadas \((t, x, y, z)\) y por el observador de \(S'\) con coordenadas \((t', x', y', z')\). El objetivo de esta sección es encontrar la relación entre estas dos coordenadas. Eso es la transformación de Lorentz.
🔵 Kai: Es decir, es la fórmula de "cómo reescribe un mismo suceso alguien que se mueve y alguien que está quieto".
🟡 Lina: Exacto. Lo que es físicamente importante aquí es que esta transformación representa un "cambio de sistema inercial". Así como la rotación espacial en 3 dimensiones era una "transformación que cambia la orientación de los ejes coordenados", esto es una transformación que "cambia a otro observador en movimiento". Tiene un nombre especial: se llama boost.
⚪ Mei: La rotación espacial y el boost son ambas transformaciones que cambian coordenadas, pero su significado físico es diferente.
- Rotación espacial: el mismo observador cambia la orientación de los ejes coordenados
- Boost: se cambia a un observador que se mueve a otra velocidad
🟡 Lina: Así es. Ahora busquemos la forma concreta del boost.
✅ Verificación de comprensión: ¿Cuál es la diferencia de significado físico entre una rotación espacial y un boost?
Respuesta
La rotación espacial es una transformación donde el mismo observador cambia la orientación de los ejes coordenados. El boost es una transformación que cambia a un observador moviéndose a otra velocidad (otro sistema inercial). Ambos son transformaciones de coordenadas, pero el boost se distingue esencialmente en que mezcla el eje temporal con los ejes espaciales.
Dos hipótesis¶
🟡 Lina: Para la derivación establecemos dos hipótesis. Ambas son físicamente naturales.
Hipótesis 1 (Linealidad): La transformación de Lorentz se puede escribir como una expresión lineal (de primer grado) en las coordenadas.
Hipótesis 2 (Isotropía): Se puede suponer sin pérdida de generalidad que la velocidad relativa \(\vec{v}\) apunta solo en la dirección \(x\).
🔵 Kai: ¿Por qué una expresión lineal?
🟡 Lina: Lo exige la homogeneidad del espaciotiempo — las leyes físicas son las mismas en cualquier lugar y momento. En 3.2「Invariancia del intervalo espaciotemporal」 también usamos el mismo principio al restringir la forma del invariante. Veámoslo con un ejemplo concreto. Si la transformación fuera cuadrática, por ejemplo \(x' = ax^2 + bt\), al desplazar el origen en \(x_0\) con \(x \to x + x_0\):
Aparece un término lineal \(2ax_0\,x\) que no estaba en la expresión original. Es decir, la forma de la transformación depende de la elección del origen \(x_0\) — las leyes físicas serían diferentes según el lugar.
En cambio, con una expresión lineal \(x' = ax + bt\), al hacer \(x \to x + x_0\): \(x' = a(x + x_0) + bt = ax + bt + ax_0\), y solo cambia el término constante. La forma de la transformación (los coeficientes de \(x\) y \(t\)) no depende del origen. Por eso, en un espaciotiempo homogéneo la transformación debe ser lineal.
⚪ Mei: La hipótesis 2 es que, como el espacio es isotrópico (todas las direcciones son equivalentes), siempre se puede reorientar el eje \(x\) en la dirección de la velocidad relativa.
🟡 Lina: Exacto. Con esto, sin pérdida de generalidad, de aquí en adelante consideraremos solo el caso en que la velocidad relativa apunta en la dirección \(x\). Por la hipótesis 1, la transformación se puede escribir en la forma:
Son 16 coeficientes en total. Los iremos restringiendo paso a paso.
Restringiendo coeficientes por simetría¶
🟡 Lina: Primero, los ejes \(y\) y \(z\) son perpendiculares a la dirección del movimiento relativo (dirección \(x\)), así que es natural suponer que estas coordenadas no cambian bajo la transformación.
🔵 Kai: ¿Por qué?
🟡 Lina: Si el movimiento relativo es solo en la dirección \(x\), las direcciones \(y\) y \(z\) son "direcciones no involucradas en el movimiento". No hay razón para que las longitudes o los tiempos en estas direcciones cambien — es un argumento de simetría. Rigurosamente, de la "simetría de inversión \(y \to -y\) y \(z \to -z\)" y la "isotropía del espacio" se puede derivar \(y' = y\), \(z' = z\). La demostración detallada se remite a las referencias.
Referencia: Derivación rigurosa de \(y' = y\), \(z' = z\)
Ver Landau-Lifshitz, Teoría clásica de campos §4, o Sunagawa, Electrodinámica teórica §12. Los puntos clave son: (1) en una transformación lineal \(y, z\) solo se combinan linealmente con \(y', z'\), (2) de la invariancia bajo la inversión \(y \to -y\), el coeficiente de proporcionalidad entre \(y\) y \(y'\) es \(\pm 1\), (3) por continuidad con la transformación identidad (\(v = 0\)) es \(+1\).
⚪ Mei: Entonces la transformación restante es
🟡 Lina: Además, se puede demostrar que \(t'\) y \(x'\) tampoco contienen \(y, z\). La razón es la misma: la simetría de inversión en \(y\) y en \(z\). Si \(t'\) contuviera \(y\), entonces \(t'\) cambiaría bajo \(y \to -y\), surgiendo una asimetría donde el paso del tiempo difiere entre las direcciones positiva y negativa de \(y\). Esto contradice la isotropía. Lo mismo para \(x'\).
Como resultado, la transformación se restringe a la forma:
Verifiquemos las dimensiones de cada coeficiente: en \(t' = a_1 t + a_2 x\), el lado izquierdo tiene dimensión de tiempo, así que tanto \(a_1 t\) (tiempo) como \(a_2 x\) (\(a_2\) × longitud) deben tener dimensión de tiempo. Por lo tanto \(a_1\) es adimensional y \(a_2\) tiene dimensión \([\text{tiempo}/\text{longitud}] = [1/\text{velocidad}]\). De manera similar, de \(x' = a_5 t + a_6 x\), \(a_5\) tiene dimensión \([\text{longitud}/\text{tiempo}] = [\text{velocidad}]\) y \(a_6\) es adimensional.
🔵 Kai: ¡Los 16 coeficientes se redujeron a 4!
Del movimiento del origen de \(S'\) se determina uno¶
🟡 Lina: Visto desde el sistema \(S\), el origen de \(S'\) (\(x' = 0\)) está en la posición \(x = vt\) en el instante \(t\). Sustituyendo \(x' = 0\) y \(x = vt\) en \(x' = a_5\,t + a_6\,x\):
Por lo tanto
⚪ Mei: Con \(a_5 = -a_6 v\) se elimina \(a_5\), así que las incógnitas son \(a_1, a_2, a_6\) — solo 3.
🔵 Kai: De 16 a 3 de golpe... la simetría es poderosa.
La invariancia de \(ds^2\) determina el resto¶
🟡 Lina: Aquí usamos la invariancia de \(ds^2\) establecida en la sección 2.
Como \(y' = y\), \(z' = z\), los términos \(dy'^2 + dz'^2 = dy^2 + dz^2\) se cancelan en ambos lados, y solo queda la relación en la dirección \(t\)-\(x\):
Los desplazamientos infinitesimales también siguen la misma transformación lineal:
Sustituyendo y desarrollando:
Expandamos el lado izquierdo y comparemos los coeficientes de \(dt^2\), \(dx^2\) y \(dt\,dx\) con el lado derecho.
⚪ Mei: Expandamos. El primer término del lado izquierdo \(-(c\,a_1\,dt + c\,a_2\,dx)^2\) es
El segundo término \(a_6^2(dx - v\,dt)^2\) es
🔵 Kai: Solo estamos usando \((a + b)^2 = a^2 + 2ab + b^2\), pero con tantos términos es fácil confundirse...
🟡 Lina: No te preocupes. Lo que estamos haciendo es simple — expandimos todo el lado izquierdo, lo organizamos en los 3 tipos \(dt^2\), \(dx^2\), \(dt\,dx\), y comparamos con los coeficientes correspondientes del lado derecho \(-(c\,dt)^2 + dx^2 = -c^2\,dt^2 + dx^2\). "Los coeficientes de los mismos tipos de términos son iguales" — es la misma idea que la identidad de polinomios.
Coeficiente de \(dt^2\):
Coeficiente de \(dx^2\):
Coeficiente de \(dt\,dx\) (término cruzado):
⚪ Mei: Solo hay que resolver estas 3 ecuaciones simultáneas.
🟡 Lina: Así es. De la ecuación del término cruzado \(-2c^2 a_1 a_2 - 2a_6^2 v = 0\), resolviendo para \(a_2\): \(a_2 = -a_6^2 v/(c^2 a_1)\). Sustituyendo esto en la ecuación de \(dx^2\): \(-c^2 a_2^2 + a_6^2 = 1\):
🔵 Kai: Hmm, hay dos incógnitas \(a_1\) y \(a_6\) y solo una ecuación, así que no se puede resolver, ¿verdad?
🟡 Lina: Exacto. Por eso usamos también la otra ecuación — la del coeficiente de \(dt^2\). De \(-c^2 a_1^2 + a_6^2 v^2 = -c^2\), reorganizando: \(c^2(a_1^2 - 1) = a_6^2 v^2\), es decir
De aquí \(a_6^2 v^2 = c^2(a_1^2 - 1)\), así que sustituyendo \(a_6^2 v^2/(c^2 a_1^2)\) que aparecía arriba:
⚪ Mei: Entonces sustituyendo en la ecuación \(a_6^2\!\left(1 - \frac{a_6^2\,v^2}{c^2\,a_1^2}\right) = 1\): \(a_6^2\!\left(1 - \left(1 - \frac{1}{a_1^2}\right)\right) = a_6^2 \cdot \frac{1}{a_1^2} = 1\), es decir \(a_6^2 = a_1^2\), o sea \(a_6 = \pm a_1\).
🟡 Lina: El signo \(\pm\) se determina por la física. Para que en el límite \(v \to 0\) se recupere la transformación identidad (\(x' = x\)), se necesita \(a_6 = +a_1\). Sustituyendo \(a_6 = a_1\) en la ecuación de \(dt^2\): \(-c^2 a_1^2 + a_1^2 v^2 = -c^2\). Factorizando \(a_1^2\) en el lado izquierdo: \(a_1^2(-c^2 + v^2) = -c^2\), es decir \(a_1^2(c^2 - v^2) = c^2\). Dividiendo ambos lados por \(c^2 - v^2\):
Por lo tanto
(\(a_2\) se obtiene sustituyendo \(a_6 = a_1\) en la ecuación del término cruzado \(a_2 = -a_6^2 v/(c^2 a_1)\) para dar \(a_2 = -a_1 v/c^2\).) Los cálculos intermedios detallados se pueden verificar también en el ejercicio (→ Problema M-1. Cálculo detallado de la determinación de los coeficientes de la transformación de Lorentz).
🔵 Kai: ¿Cómo se determina el signo de \(a_6 = \pm\)?
🟡 Lina: Buena pregunta. Para que en \(v \to 0\) se recupere la transformación identidad (\(t' = t\), \(x' = x\)), se elige \(a_6 = +1/\sqrt{\cdots}\). Si se eligiera el signo negativo, se obtendría una transformación que incluye una inversión espacial.
Transformación de Lorentz completa¶
🟡 Lina: Introduciendo el factor de Lorentz (Lorentz factor)
y la velocidad adimensional (beta) \(\beta \equiv v/c\), la transformación se escribe de forma compacta:
En forma matricial:
Esta es la transformación de Lorentz que representa el boost en la dirección \(x\).
🔵 Kai: En Cap. 1 apareció la transformación de Galileo \(x' = x - vt\), \(t' = t\). Cuando \(v \ll c\), \(\gamma \approx 1\), \(\beta \approx 0\), y el término \(\beta\,x/c\) en la ecuación de \(t'\) también se puede despreciar, así que... ¡se recupera la transformación de Galileo! Pero al contrario, cuando \(v\) se acerca a \(c\), ¿cuánta diferencia hay?
🟡 Lina: Buena pregunta. La transformación de Lorentz es la "versión corregida que tiene en cuenta la velocidad de la luz" de la transformación de Galileo. A velocidades cotidianas la diferencia es imperceptible, pero cuando \(v\) se acerca a \(c\) se vuelve dramática. Resumamos la comparación entre ambas transformaciones en una tabla.
Tabla 3.4: Comparación entre la transformación de Galileo y la transformación de Lorentz
| Transformación de Galileo | Transformación de Lorentz | |
|---|---|---|
| Transformación del tiempo | \(t' = t\) (tiempo absoluto) | \(ct' = \gamma(ct - \beta\,x)\) |
| Transformación del espacio | \(x' = x - vt\) | \(x' = \gamma(x - \beta\,ct)\) |
| Invariante que preserva | Distancia espacial \(dx^2 + dy^2 + dz^2\) | Intervalo espaciotemporal \(-(cdt)^2 + dx^2 + dy^2 + dz^2\) |
| Relación entre tiempo y espacio | Completamente independientes | Se mezclan |
| Suma de velocidades | \(v_{12} = v_1 + v_2\) | \(v_{12} = \dfrac{v_1 + v_2}{1 + v_1 v_2/c^2}\) (se deduce aplicando la transformación de Lorentz dos veces. Derivación en el ejercicio → Problema M-5. Derivación de la regla de composición de velocidades. Para \(v_1, v_2 \ll c\) se recupera la fórmula de Galileo, y para \(v_1 = v_2 = c\) da \(v_{12} = c\) — no se supera la velocidad de la luz) |
| Rango de validez | \(v \ll c\) | Cualquier \(v < c\) |
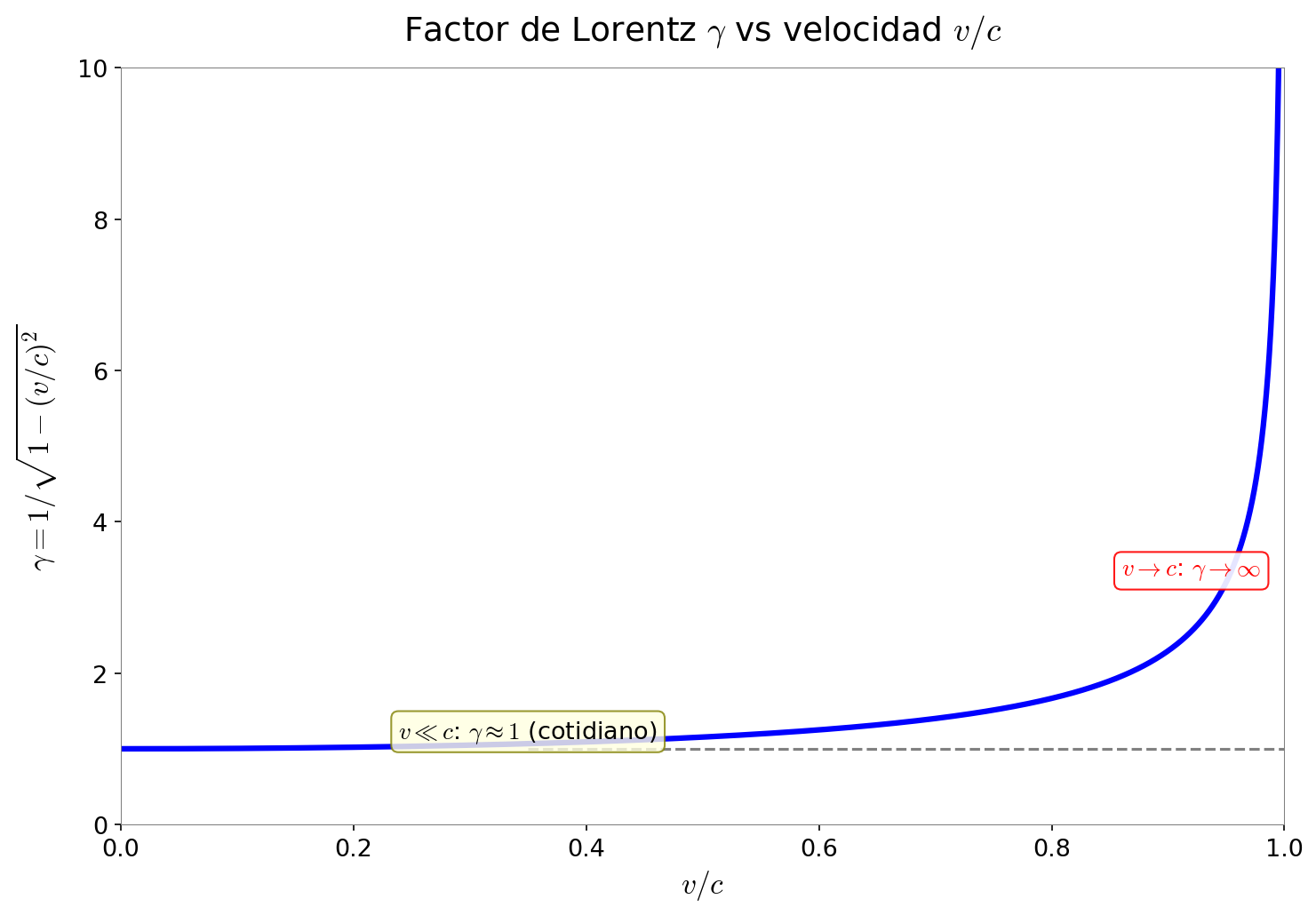
Fig. 3.8: Relación entre el factor de Lorentz y la velocidad. El factor de Lorentz \(\gamma = 1/\sqrt{1 - v^2/c^2}\) crece abruptamente a medida que la velocidad se acerca a la de la luz. A velocidades cotidianas (\(v \ll c\)), \(\gamma \approx 1\), pero \(\gamma \to \infty\) cuando \(v \to c\).
🔵 Kai: Mirando Fig. 3.8「Relación entre el factor de Lorentz y la velocidad」, \(\gamma\) diverge a infinito cuando \(v \to c\). ¿Eso significa que no se puede alcanzar exactamente \(v = c\)?
🟡 Lina: Exacto. Acelerar un objeto con masa hasta la velocidad de la luz requeriría energía infinita — esto lo veremos cuantitativamente en Cap. 4 cuando derivemos la relación entre energía y momento.
✅ Verificación de comprensión: ¿En qué límite la transformación de Lorentz se reduce a la transformación de Galileo?
Respuesta
En el límite \(v \ll c\) (velocidad mucho menor que la de la luz). En ese caso \(\gamma \approx 1\) y se obtiene \(t' \approx t\), \(x' \approx x - vt\), que es la transformación de Galileo.
Interpretación geométrica — el boost es una "rotación hiperbólica" del espaciotiempo¶
🟡 Lina: Hasta aquí hemos obtenido la forma concreta de la transformación de Lorentz. Pero al observar esta matriz se revela una estructura — la forma de la expresión es muy parecida a la rotación espacial en 3 dimensiones.
🔵 Kai: ¿La rotación espacial y el boost se parecen?
🟡 Lina: Comparémoslos. La rotación de coordenadas en el plano \(xy\) (transformación que rota los ejes un ángulo \(\theta\) en sentido antihorario) es:
(En 3.2「Invariancia del intervalo espaciotemporal」 la escribimos en la forma de transformación inversa "expresar \((x, y)\) usando \((x', y')\)". Aquí la escribimos en la forma directa "obtener \((x', y')\) a partir de \((x, y)\)" para compararla con el boost. Resolviendo las ecuaciones de la sección 2 \(x = x'\cos\theta - y'\sin\theta\), \(y = x'\sin\theta + y'\cos\theta\) para \((x', y')\) se obtiene \(x' = x\cos\theta + y\sin\theta\), \(y' = -x\sin\theta + y\cos\theta\). Verificación: \(x'^2 + y'^2 = (x\cos\theta + y\sin\theta)^2 + (-x\sin\theta + y\cos\theta)^2\). Expandiendo: \(x^2\cos^2\theta + 2xy\cos\theta\sin\theta + y^2\sin^2\theta + x^2\sin^2\theta - 2xy\sin\theta\cos\theta + y^2\cos^2\theta = x^2(\cos^2\theta + \sin^2\theta) + y^2(\sin^2\theta + \cos^2\theta) = x^2 + y^2\).)
Esta preserva el invariante \(x^2 + y^2\). Por otro lado, la transformación de Lorentz (boost) en la dirección \(t\)-\(x\) es:
Esta preserva el invariante \(-(ct)^2 + x^2\). La estructura de las matrices es similar — los elementos diagonales son iguales y los valores absolutos de los elementos fuera de la diagonal también son iguales. Sin embargo, la matriz de rotación tiene elementos fuera de la diagonal con signos opuestos entre sí (el elemento \((1,2)\) es \(+\sin\theta\) y el \((2,1)\) es \(-\sin\theta\)), mientras que la matriz del boost tiene elementos fuera de la diagonal con el mismo signo (ambos son \(-\sinh\varphi\)). ¿Por qué surge esta diferencia? Porque el invariante que preserva la rotación es \(x^2 + y^2\) (todo positivo), mientras que el invariante que preserva el boost es \(-(ct)^2 + x^2\) (signos mezclados) — esta diferencia en la estructura de signos se refleja en la simetría de la matriz.
⚪ Mei: La diferencia es que la rotación espacial usa \(\cos^2\theta + \sin^2\theta = 1\) (con signo positivo), y el boost preserva un invariante con signos negativo y positivo combinados, así que... parece que se puede usar alguna identidad diferente.
🟡 Lina: Exacto. Aquí introducimos funciones nuevas. Las funciones trigonométricas \(\cos\theta, \sin\theta\) eran la parametrización de la circunferencia unitaria \(x^2 + y^2 = 1\) (poniendo \(x = \cos\theta, y = \sin\theta\), se satisface automáticamente \(x^2 + y^2 = 1\)). De la misma manera, para la hipérbola unitaria \(x^2 - y^2 = 1\), existen funciones que con solo una variable \(\varphi\) representan todos los puntos \((x, y)\) de la curva — son las funciones hiperbólicas (hyperbolic functions):
Esta definición puede parecer que sale de la nada, pero la idea es simple. Queremos representar \((x, y)\) que satisfaga \(x^2 - y^2 = 1\) con un solo parámetro \(\varphi\) — la misma idea que las funciones trigonométricas satisfaciendo automáticamente \(\cos^2\theta + \sin^2\theta = 1\).
🔵 Kai: Las trigonométricas son para la circunferencia unitaria con \(+\), y estas para la hipérbola con \(-\). ¿Concretamente cómo se llega a esta forma?
🟡 Lina: Primero factorizamos \(x^2 - y^2 = (x+y)(x-y) = 1\). Es decir, necesitamos que "el producto de \(x+y\) y \(x-y\) sea 1". Queremos encontrar un par de funciones cuyo producto sea 1. Recuerda la regla de exponentes que aprendiste en bachillerato: \(e^a \cdot e^b = e^{a+b}\) — ¿qué pasa si elegimos \(a\) y \(b\) de modo que su suma sea cero?
🔵 Kai: Si pongo \(a = \varphi\), \(b = -\varphi\), ¡entonces \(e^\varphi \cdot e^{-\varphi} = e^0 = 1\)! Efectivamente el producto es 1.
🟡 Lina: ¡Exacto! Poniendo \(x + y = e^\varphi\), \(x - y = e^{-\varphi}\), se tiene \((x+y)(x-y) = e^\varphi \cdot e^{-\varphi} = 1\) y \(x^2 - y^2 = 1\) se satisface automáticamente. Resolviendo este sistema para \(x, y\): \(x = (e^\varphi + e^{-\varphi})/2\), \(y = (e^\varphi - e^{-\varphi})/2\). A estas expresiones les damos los nombres \(\cosh\varphi\), \(\sinh\varphi\) — esa es la definición de las funciones hiperbólicas.
🔵 Kai: Entiendo la definición, pero ¿qué valores concretos toman? Me gustaría tener la intuición de tipo \(\cos 0 = 1\), \(\sin 0 = 0\).
🟡 Lina: Veamos valores concretos (\(e \approx 2.718\) es la base del logaritmo natural, y \(e^\varphi\) es una función que crece rápidamente cuando \(\varphi\) aumenta, con las propiedades \(e^0 = 1\), \(e^{-\varphi} = 1/e^\varphi\)). Para \(\varphi = 0\): \(\cosh 0 = (1+1)/2 = 1\), \(\sinh 0 = (1-1)/2 = 0\). Para \(\varphi = 1\): \(\cosh 1 = (e + e^{-1})/2 \approx (2.72 + 0.37)/2 \approx 1.54\), \(\sinh 1 = (e - e^{-1})/2 \approx (2.72 - 0.37)/2 \approx 1.18\). A medida que \(\varphi\) crece, \(\cosh\varphi\) aumenta rápidamente como \(e^\varphi/2\), y \(\sinh\varphi\) crece de forma similar (aunque \(\cosh\) siempre es mayor que \(\sinh\)).
⚪ Mei: Para \(\varphi = 0\): \((\cosh, \sinh) = (1, 0)\) — el mismo punto de partida que \((\cos 0, \sin 0) = (1, 0)\) en las funciones trigonométricas.
🟡 Lina: Así es. Poniendo \(x = \cosh\varphi\), \(y = \sinh\varphi\), se cumple \(x^2 - y^2 = \cosh^2\varphi - \sinh^2\varphi = 1\) — por eso se llaman funciones "hiperbólicas". De la misma manera que al poner \(x = \cos\theta\), \(y = \sin\theta\) se obtiene \(x^2 + y^2 = 1\) (la circunferencia unitaria), las funciones hiperbólicas describen \(x^2 - y^2 = 1\) (la hipérbola unitaria). Verifiquémoslo:
Usando \((a+b)^2 - (a-b)^2 = 4ab\) (fórmula de expansión de bachillerato), con \(a = e^\varphi/2\), \(b = e^{-\varphi}/2\):
(Usamos la regla de exponentes \(e^a \cdot e^b = e^{a+b}\).) Al variar \(\varphi\), el punto \((x, y)\) se mueve sobre la hipérbola \(x^2 - y^2 = 1\).
🔵 Kai: Se definen con la función exponencial de \(e\). Se parecen en forma a \(\cos\theta\) y \(\sin\theta\), pero ¿hay alguna relación? Me llama la atención que aparezca \(e^\varphi\) en la definición...
🟡 Lina: Buena intuición. En realidad hay una conexión matemática profunda entre las funciones trigonométricas y las hiperbólicas. Sin embargo, para entenderla se necesitan conocimientos de números complejos, así que no profundizaremos ahora. Por el momento basta con pensar en ellas como "parientes de las funciones trigonométricas, donde el signo de la identidad cambia de \(+\) a \(-\)".
🔵 Kai: "Parientes con el signo cambiado". Entonces por ahora no profundizo y sigo adelante.
🟡 Lina: En Fig. 3.9「Comparación entre funciones trigonométricas e hiperbólicas」 se ve la correspondencia entre ambas de un vistazo.
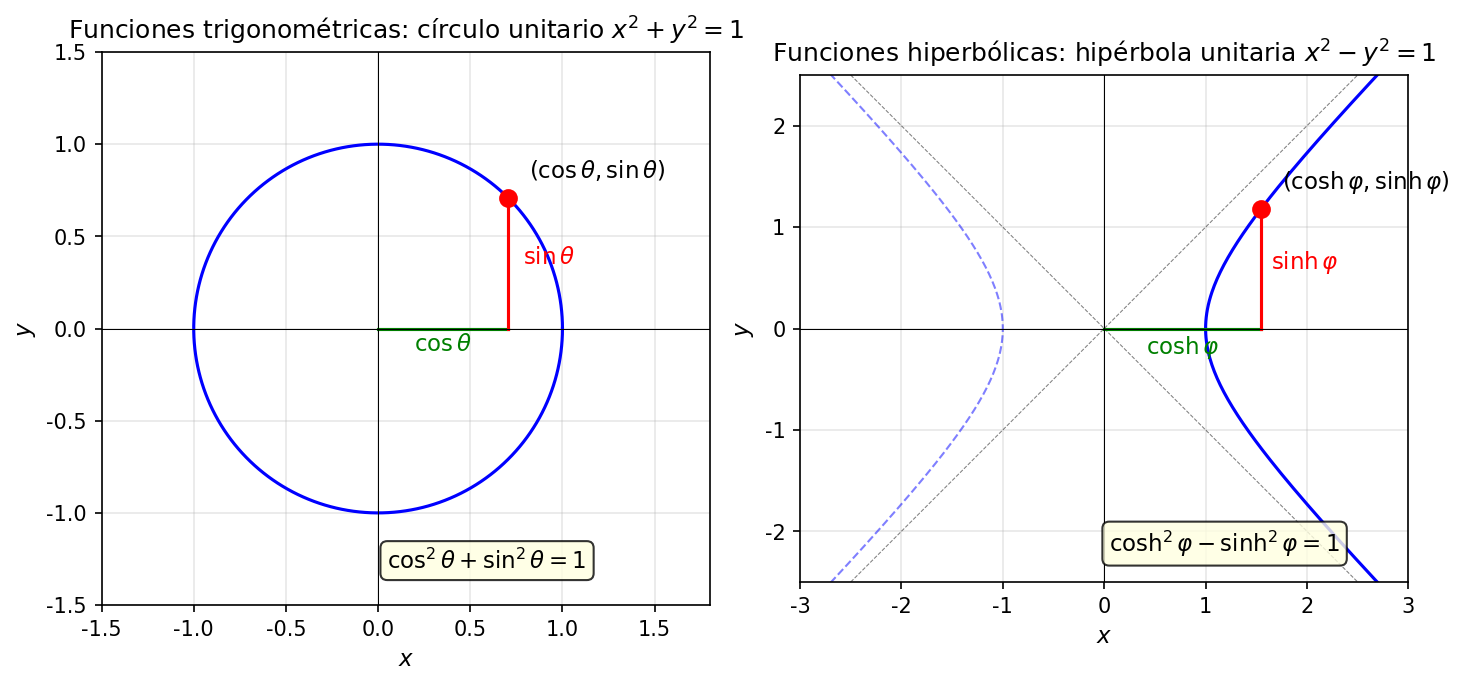
Fig. 3.9: Comparación entre funciones trigonométricas e hiperbólicas. Izquierda: Las funciones trigonométricas \((\cos\theta, \sin\theta)\) se mueven sobre la circunferencia unitaria \(x^2 + y^2 = 1\). Derecha: Las funciones hiperbólicas \((\cosh\varphi, \sinh\varphi)\) se mueven sobre la hipérbola unitaria \(x^2 - y^2 = 1\). La diferencia de signo en la identidad (\(+\) vs \(-\)) corresponde a la diferencia entre geometría euclidiana y espaciotiempo de Minkowski.
🟡 Lina: Y la identidad importante es
Frente al signo positivo de \(\cos^2\theta + \sin^2\theta = 1\) de las funciones trigonométricas, las funciones hiperbólicas tienen signo negativo. Exactamente correspondiente al patrón de signos de \(-(ct)^2 + x^2\).
🔵 Kai: Entonces entiendo que las funciones hiperbólicas vienen al caso. Pero todavía no me queda clara la motivación para reemplazar \(\gamma\) y \(\beta\) por \(\cosh, \sinh\).
🟡 Lina: La clave es "quiero reescribir la matriz de la transformación de Lorentz con un solo parámetro". La matriz de la rotación espacial se determina con un único parámetro, el ángulo \(\theta\) (\(\cos\theta, \sin\theta\) varían conjuntamente). De la misma manera, la matriz del boost también debería poder escribirse con un solo parámetro.
Observando los elementos de la matriz del boost \(\gamma\) y \(\gamma\beta\), se cumple la relación \(\gamma^2 - (\gamma\beta)^2 = \gamma^2(1 - \beta^2) = \frac{1}{1-\beta^2}\cdot(1-\beta^2) = 1\) — ¡esto tiene la misma forma que la identidad hiperbólica \(\cosh^2\varphi - \sinh^2\varphi = 1\)! Así que si ponemos \(\cosh\varphi = \gamma, \sinh\varphi = \gamma\beta\), la identidad se satisface automáticamente. Usando este \(\varphi\), se pueden expresar \(\gamma\) y \(\beta\) simultáneamente con un solo parámetro.
🔵 Kai: ¡Oh, \(\gamma^2 - (\gamma\beta)^2 = 1\) tiene exactamente la forma de la identidad hiperbólica!
🟡 Lina: Verifiquémoslo concretamente. Identificando \(\gamma = 1/\sqrt{1-\beta^2}\) con \(\cosh\varphi\), por la identidad: \(\sinh\varphi = \sqrt{\cosh^2\varphi - 1} = \sqrt{\gamma^2 - 1} = \sqrt{1/(1-\beta^2) - 1} = \beta/\sqrt{1-\beta^2} = \gamma\beta\). Y con la misma idea que \(\tan\theta = \sin\theta/\cos\theta\) en las funciones trigonométricas, definiendo \(\tanh\varphi \equiv \sinh\varphi/\cosh\varphi\) (tangente hiperbólica): \(\tanh\varphi = \gamma\beta/\gamma = \beta\). En cuanto a la pronunciación, \(\cosh\) se lee "cosh", \(\sinh\) se lee "senh", y \(\tanh\) se lee "tanh" (también hay quien dice "coseno hiperbólico", etc.). \(\tanh\) es una función que vale cero en \(\varphi = 0\) y tiende asintóticamente a 1 cuando \(\varphi \to \infty\) — es decir, corresponde perfectamente al hecho de que \(\beta = v/c\) se acerca de 0 a 1 (se aproxima a la velocidad de la luz pero no la alcanza). Por lo tanto:
A este parámetro \(\varphi\) se le llama rapidez (rapidity). Entonces la transformación de Lorentz es:
¡Casi la misma forma que la rotación espacial! Se sustituye \(\cos \to \cosh\), \(\sin \to \sinh\), y el patrón de signos de los elementos fuera de la diagonal es ligeramente diferente (la rotación tiene \(+\sin\) y \(-\sin\), el boost tiene ambos \(-\sinh\)), pero la estructura de "elementos diagonales iguales y valores absolutos de los elementos fuera de la diagonal iguales" es compartida.
🔵 Kai: ¿Entonces el boost es una especie de "rotación" en el espaciotiempo?
🟡 Lina: Sí. Mientras la rotación espacial es una transformación que mezcla los ejes \(x\)-\(y\), el boost es una transformación que mezcla los ejes \(t\)-\(x\). Sin embargo, como el eje temporal y el eje espacial tienen signos opuestos en el invariante (\(-(ct)^2 + x^2\)), no es una rotación ordinaria (\(\cos, \sin\)) sino una rotación hiperbólica (hyperbolic rotation).
⚪ Mei: Por eso se dice que "la transformación de Lorentz es una rotación del espaciotiempo". Físicamente es un cambio de sistema inercial, pero geométricamente es lo mismo que una rotación hiperbólica en el plano \(t\)-\(x\).
🔵 Kai: Por cierto, ¿hasta qué valor puede crecer la rapidez \(\varphi\)? El ángulo \(\theta\) va de \(0\) a \(2\pi\) y vuelve al inicio.
🟡 Lina: La rapidez puede tomar libremente el rango \(-\infty < \varphi < \infty\). Está ligada a la velocidad por \(\tanh\varphi = v/c\), y cuando \(\varphi \to \infty\), \(v \to c\) (se aproxima a la velocidad de la luz pero no la alcanza). Es decir, la rotación espacial tiene un espacio de parámetros compacto (\([0, 2\pi)\), periódico con rango finito), mientras que el boost es no compacto (se extiende infinitamente).
⚪ Mei: La diferencia entre "dar una vuelta completa y volver al inicio" en la rotación y "por mucho que aceleres nunca alcanzas la velocidad de la luz" en el boost se refleja directamente en la forma del espacio de parámetros.
🟡 Lina: Esta diferencia también es importante desde el punto de vista de la teoría de grupos y está profundamente relacionada con la estructura matemática del grupo de Lorentz. Por ahora, recuerda que "ambos tienen formas similares, pero el rango de valores que puede tomar el parámetro es decisivamente diferente". Y las 3 rotaciones espaciales (\(x\)-\(y\), \(y\)-\(z\), \(z\)-\(x\)) más los 3 boosts (\(t\)-\(x\), \(t\)-\(y\), \(t\)-\(z\)), en total 6 tipos de transformaciones, se llaman en sentido amplio la transformación de Lorentz.
%%{init: {"theme": "default", "themeCSS": ".edgePath .path, .flowchart-link { stroke-width: 2px !important; }"}}%%
flowchart TB
ds["Invariante ds² = -(cdt)² + dx² + dy² + dz²"]
ds -->|"Transformaciones que preservan ds²"| LT["<b>Transformación de Lorentz</b> (6 tipos)"]
LT --> rot["<b>Rotaciones espaciales</b> (3 tipos)<br/>Rotaciones entre ejes x-y, y-z, z-x<br/>Parámetro: ángulo θ<br/>cos²θ + sin²θ = 1"]
LT --> boost["<b>Boosts</b> (3 tipos)<br/>Rotaciones hiperbólicas entre ejes t-x, t-y, t-z<br/>Parámetro: rapidez φ<br/>cosh²φ - sinh²φ = 1<br/>= cambio de sistema inercial"]
style ds fill:#fff3cd,stroke:#856404
style LT fill:#d1ecf1,stroke:#0c5460
style rot fill:#d4edda,stroke:#155724
style boost fill:#f8d7da,stroke:#721c24✅ Verificación de comprensión: ¿Por qué la parte de boost de la transformación de Lorentz se parece a una rotación espacial pero se llama "rotación hiperbólica"?
Respuesta
Mientras que la rotación espacial preserva el invariante \(x^2 + y^2\) y corresponde a la identidad trigonométrica \(\cos^2\theta + \sin^2\theta = 1\), el boost preserva el invariante \(-(ct)^2 + x^2\) (que incluye un signo negativo) y corresponde a la identidad hiperbólica \(\cosh^2\varphi - \sinh^2\varphi = 1\). La forma de la matriz es la misma, con la sustitución \(\cos \to \cosh\), \(\sin \to \sinh\).
Mira Fig. 3.11「Hipérbolas invariantes y boost de Lorentz」. El lugar geométrico de \(-(ct)^2 + x^2 = \text{const}\) describe hipérbolas — el boost mueve los puntos a lo largo de estas hipérbolas. Las marcas de los ejes de coordenadas boosteados se calibran con las intersecciones con las hipérbolas invariantes.
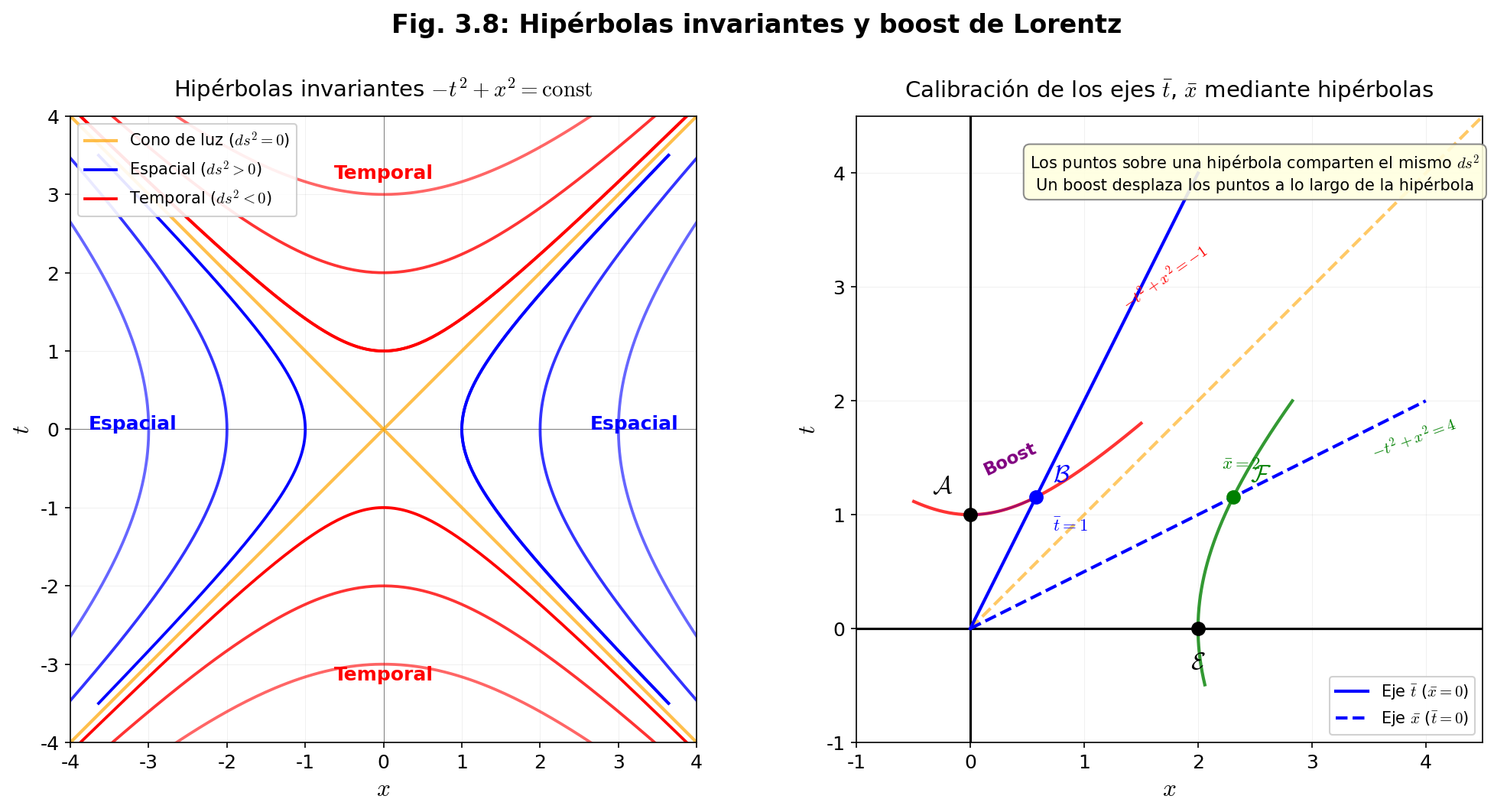
Fig. 3.11: Hipérbolas invariantes y boost de Lorentz. Izquierda: El lugar geométrico de \(-(ct)^2 + x^2 = \mathrm{const}\) describe hipérbolas (los ejes se dibujan en unidades \(c = 1\)). Las hipérbolas de tipo temporal (\(ds^2 < 0\), rojo) y de tipo espacial (\(ds^2 > 0\), azul) están separadas por el cono de luz (naranja). Derecha: Las marcas de los ejes de coordenadas boosteados \(\bar{t}, \bar{x}\) se calibran con las intersecciones con las hipérbolas invariantes. El evento \(\mathcal{A}\) (en el sistema \(S\), \(t=1\)) y el evento \(\mathcal{B}\) (en el sistema \(\bar{S}\), \(\bar{t}=1\)) están sobre la misma hipérbola y están conectados por un boost.
📝 Ejercicios:
- Funciones hiperbólicas, rapidez y derivación de la transformación de Lorentz → Problema B-1. Derivación de la identidad de las funciones hiperbólicas, Problema B-2. Relación entre la rapidez y el factor de Lorentz, Problema B-3. Cálculo de contracción de la matriz de transformación de Lorentz, Problema M-1. Cálculo detallado de la determinación de los coeficientes de la transformación de Lorentz, Problema M-2. Condición de preservación de la métrica bajo transformaciones de Lorentz
3.4 Consecuencias físicas de la transformación de Lorentz¶
🟡 Lina: A continuación derivaremos tres consecuencias físicas. A partir de las ecuaciones de la transformación de Lorentz, veremos que los conceptos de simultaneidad, tiempo y longitud cambian de un sistema inercial a otro.
Sobre el sistema de unidades en esta sección: En este capítulo escribimos explícitamente \(c\). En el siguiente Cap. 4 introduciremos el sistema de unidades naturales \(c = 1\), pero al examinar las consecuencias físicas es mejor mantener \(c\) para que la correspondencia dimensional sea más clara.
Relatividad de la simultaneidad¶
🟡 Lina: Miremos de nuevo la ecuación de \(t'\) de la transformación de Lorentz.
Consideremos dos eventos que en el sistema \(S\) son simultáneos (\(t_A = t_B\)) pero ocurren en lugares diferentes (\(x_A \neq x_B\)):
🔵 Kai: ¡Ya no son simultáneos! Si los lugares son diferentes, en otro sistema inercial hay un desfase temporal. ...Pero \(-\gamma v(x_A - x_B)/c^2\) significa que cuanto mayor sea la diferencia de posición \(x_A - x_B\), mayor es el desfase. Para escalas cotidianas — por ejemplo, dos lugares separados 1 km — ¿cuánto desfase hay?
🟡 Lina: Por ejemplo, para un tren bala (\(v \approx 80\,\mathrm{m/s}\)) con \(x_A - x_B = 1\,\mathrm{km}\): \(\gamma v \Delta x / c^2 \approx 80 \times 1000 / (3 \times 10^8)^2 \approx 10^{-12}\,\mathrm{s}\) — una billonésima de segundo. Indetectable en la vida cotidiana, pero un efecto que no se puede ignorar en sistemas de precisión como los satélites GPS. Esto es la relatividad de la simultaneidad (relativity of simultaneity). La "simultaneidad absoluta" de Newton no se cumple. Mira Fig. 3.12「Relatividad de la simultaneidad」 — se ve visualmente cómo la línea de simultaneidad de \(S\) y la de \(S'\) están inclinadas una respecto a la otra.
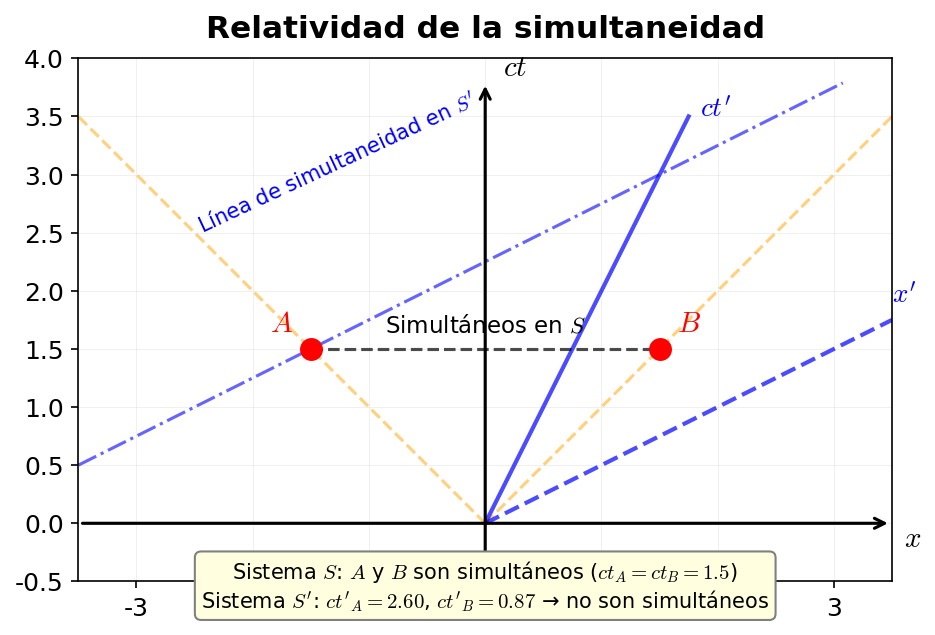
Fig. 3.12: Relatividad de la simultaneidad. Dos eventos A, B simultáneos en el sistema \(S\) (línea punteada negra) no son simultáneos en el sistema \(S'\) (\(v = 0.5c\)). La causa es que la línea de simultaneidad del sistema \(S'\) (línea de puntos y rayas azul) está inclinada respecto a la línea de simultaneidad del sistema \(S\).
Dilatación del tiempo¶
🟡 Lina: Para entender intuitivamente la dilatación del tiempo, usaremos el experimento mental del "reloj de luz" (Fig. 3.13「Derivación de la dilatación del tiempo mediante un reloj de luz」).

Fig. 3.13: Derivación de la dilatación del tiempo mediante un reloj de luz. Experimento mental del reloj de luz. Izquierda: En el sistema \(S'\) (donde el reloj de luz está en reposo), la luz viaja verticalmente entre los espejos y el tiempo de ida y vuelta es \(\Delta t' = 2L/c\). Derecha: En el sistema \(S\) (donde el reloj de luz se mueve a velocidad \(v\)), la luz sigue una trayectoria diagonal y del teorema de Pitágoras se deduce \(\Delta t = \gamma\,\Delta t'\).
🟡 Lina: Consideremos un "reloj de luz" en el que la luz rebota entre 2 espejos separados una distancia \(L\). En el sistema \(S'\) (donde el reloj está en reposo), la luz viaja verticalmente, así que el tiempo de un viaje de ida y vuelta es \(\Delta t' = 2L/c\). En el sistema \(S\) (donde el reloj se mueve lateralmente a velocidad \(v\)), la luz viaja en diagonal y el camino es más largo. Si llamamos \(d\) a la distancia que recorre la luz en medio viaje, la luz avanza \(L\) en vertical y \(v \cdot (\Delta t/2)\) en horizontal, así que por el teorema de Pitágoras: \(d = \sqrt{L^2 + (v\Delta t/2)^2}\). Como la velocidad de la luz es \(c\): \(d = c\Delta t/2\). Sustituyendo: \((c\Delta t/2)^2 = L^2 + (v\Delta t/2)^2\), y resolviendo: \(\Delta t = 2L/(c\sqrt{1-v^2/c^2}) = \gamma\,\Delta t'\) — el tiempo se alarga. Esta es la comprensión intuitiva de la dilatación del tiempo.
🔵 Kai: Se puede derivar solo con el teorema de Pitágoras. La luz viaja en diagonal y por eso tarda más — simple pero profundo.
🟡 Lina: Ahora derivemos el mismo resultado directamente de la transformación de Lorentz. Sea \(\Delta t'\) el intervalo de tiempo entre dos eventos que ocurren en el mismo lugar (\(\Delta x' = 0\)) del sistema \(S'\). La transformación inversa de Lorentz — de \(S'\) a \(S\) — se obtiene simplemente sustituyendo \(v \to -v\) en la transformación directa. La razón es esta: por el principio de relatividad, la forma de las ecuaciones de la transformación de Lorentz es la misma sin importar qué sistema inercial se tome como referencia. Tomando \(S\) como referencia, "\(S'\) se mueve a velocidad \(+v\)" y se obtiene la transformación directa. Ahora, tomando \(S'\) como referencia, "\(S\) se mueve a velocidad \(-v\)" — desde \(S'\), \(S\) se aleja en dirección opuesta, así que el signo de la velocidad se invierte. Como la misma forma de ecuación solo cambia la velocidad a \(-v\), la transformación inversa se obtiene con la sustitución \(v \to -v\). Como \(\gamma = 1/\sqrt{1 - v^2/c^2}\) solo depende de \(v^2\), al hacer \(v \to -v\) el valor de \(\gamma\) no cambia — solo cambia el signo de \(\beta = v/c\). Escribiéndolo explícitamente, de la transformación directa \(ct' = \gamma(ct - \beta x)\), \(x' = \gamma(x - \beta\,ct)\) con \(v \to -v\) (es decir \(\beta \to -\beta\)):
Es decir \(t = \gamma(t' + vx'/c^2)\), \(x = \gamma(x' + vt')\).
(Verificación — se puede saltar: Sustituyendo la transformación inversa \(t = \gamma(t' + vx'/c^2)\), \(x = \gamma(x' + vt')\) en la directa \(ct' = \gamma(ct - \beta x)\) y comprobando que se recupera \(ct'\). \(ct = c\gamma(t' + vx'/c^2) = \gamma(ct' + vx'/c)\), \(\beta x = (v/c)\gamma(x' + vt') = \gamma(vx'/c + v^2t'/c)\). Por lo tanto \(\gamma(ct - \beta x) = \gamma\bigl[\gamma(ct' + vx'/c) - \gamma(vx'/c + v^2t'/c)\bigr] = \gamma^2\bigl(ct' - v^2t'/c\bigr) = \gamma^2 \cdot ct'(1 - v^2/c^2) = ct'\). En el último paso usamos \(\gamma^2(1 - v^2/c^2) = 1\), que sale directamente de la definición \(\gamma = 1/\sqrt{1-v^2/c^2}\).) Con \(\Delta x' = 0\):
Como \(\gamma > 1\), se tiene \(\Delta t > \Delta t'\). Esto se representa en un diagrama espaciotemporal como en Fig. 3.14「Representación en diagrama espaciotemporal de la dilatación del tiempo」.
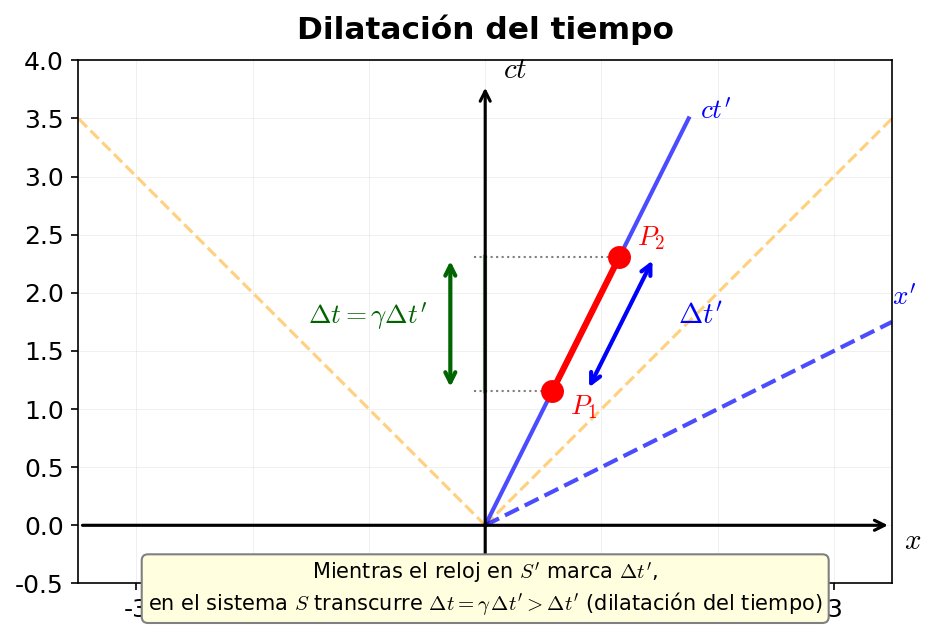
Fig. 3.14: Representación en diagrama espaciotemporal de la dilatación del tiempo. El intervalo que marca un reloj en reposo en el sistema \(S'\), \(\Delta t'\), se estira a \(\Delta t = \gamma\,\Delta t'\) visto desde el sistema \(S\). El intervalo a lo largo del eje \(ct'\) se alarga al proyectarse sobre el eje \(ct\).
Como \(\gamma > 1\), \(\Delta t > \Delta t'\).
🔵 Kai: ¡Un reloj en movimiento avanza más despacio! Con \(v = 0.9c\), \(\gamma \approx 2.3\), así que el tiempo se retrasa más del doble... Pero espera, desde el sistema \(S\) se ve que el reloj de \(S'\) se retrasa, pero desde \(S'\) es el sistema \(S\) el que se mueve, así que ¿desde \(S'\) también se ve que el reloj de \(S\) se retrasa? ¿No es eso una contradicción de que "el otro va más lento"?
🟡 Lina: La duda de "ambos más lentos" es muy importante — es el famoso problema de la paradoja de los gemelos, que trataremos en detalle en el Dive Deep que viene justo después. Adelantando la conclusión: no hay contradicción. "Ambos ven al otro más lento" es simétrico mientras los dos sigan en movimiento rectilíneo uniforme, y no se puede hacer un experimento que determine cuál es "realmente más lento". La aparente contradicción surge cuando uno de ellos acelera para regresar — entonces la simetría se rompe y el que aceleró envejece definitivamente menos.
La verificación experimental se ha realizado con muones (muon) generados por rayos cósmicos. Su vida media en reposo es de aproximadamente \(2.2\,\mu\mathrm{s}\), pero los muones que vuelan a velocidades cercanas a la luz tienen su vida media extendida vista por un observador terrestre, pudiendo atravesar la atmósfera y llegar a la superficie.
🔵 Kai: \(2.2\,\mu\mathrm{s}\) — incluso a la velocidad de la luz solo recorrería \(c \times 2.2 \times 10^{-6} \approx 660\,\mathrm{m}\), ¿verdad? La atmósfera tiene decenas de km de espesor y aun así llegan a la superficie, eso significa que \(\gamma\) debe ser bastante grande... ¿cuánto exactamente?
🟡 Lina: Los muones típicos de rayos cósmicos tienen alta energía y vuelan a aproximadamente \(v \approx 0.998c\). En ese caso \(\gamma \approx 15\), y la vida media vista por un reloj terrestre es \(15 \times 2.2\,\mu\mathrm{s} \approx 33\,\mu\mathrm{s}\). En ese tiempo recorren \(0.998c \times 33\,\mu\mathrm{s} \approx 10\,\mathrm{km}\) — suficiente para llegar de la atmósfera superior a la superficie.
⚪ Mei: Si estuviera en reposo solo podría recorrer \(660\,\mathrm{m}\), pero gracias a la dilatación del tiempo puede recorrer más de \(10\,\mathrm{km}\) — evidencia directa de la dilatación del tiempo.
🔍 Dive Deep: La paradoja de los gemelos — ¿por qué no hay contradicción?
🔵 Kai: Espera un momento. Dices "un reloj en movimiento se retrasa", pero desde \(S\) es \(S'\) el que se mueve, y desde \(S'\) es \(S\) el que se mueve. Si cada uno afirma que "el reloj del otro se retrasa", ¿no es contradictorio? Con unos gemelos, si uno viaja en cohete y regresa, ¿cuál es más joven?
🟡 Lina: Esa es la famosa paradoja de los gemelos (twin paradox). Adelantando la conclusión: el que viajó en cohete es más joven. No hay contradicción.
El punto clave es que la simetría se rompe. El hermano que se queda en la Tierra permanece siempre en un sistema inercial (movimiento rectilíneo uniforme, aceleración cero). En cambio, el hermano que viaja en cohete acelera al partir, desacelera e invierte en el punto de retorno, y desacelera al regresar — es decir, experimenta aceleración. Esta aceleración hace que las situaciones de ambos sean asimétricas.
La expresión "un reloj en movimiento se retrasa" de la relatividad especial solo puede usarse para la comparación entre sistemas inerciales. El cohete del hermano viajero cambia de sistema inercial en el punto de retorno, así que no se puede decir simplemente "desde la perspectiva del hermano, es el otro el que se mueve".
Cuantitativamente, se piensa en términos del tiempo propio \(\tau\) (el tiempo que marca el reloj del propio objeto). Aplicando la fórmula de dilatación del tiempo \(\Delta t' = \Delta t/\gamma = \Delta t\sqrt{1 - v^2/c^2}\) en intervalos infinitesimales cuando la velocidad varía y sumando: \(\tau = \int \sqrt{1 - v^2/c^2}\,dt\) (la definición formal del tiempo propio se dará en Cap. 4). Calculando esta integral a lo largo de la línea de mundo de cada uno se obtiene la respuesta. Para el hermano en el sistema inercial: \(\tau_{\text{hermano}} = \Delta t\) (el tiempo coordenado directamente). Para el hermano que acelera y desacelera, hay intervalos con \(v > 0\) donde \(\sqrt{1 - v^2/c^2} < 1\), así que \(\tau_{\text{viajero}} < \Delta t = \tau_{\text{hermano}}\). El viajero tiene menos tiempo propio = es más joven.
🔵 Kai: En el diagrama espaciotemporal, la línea de mundo del hermano es recta y la del viajero es una línea quebrada... en geometría ordinaria, desviarse hace el camino más largo. ¿Pero aquí el viajero tiene menos tiempo propio — está al revés?
🟡 Lina: Buena observación. Exacto: en el espaciotiempo de Minkowski, la línea de mundo recta maximiza el tiempo propio — tiene la propiedad inversa a la geometría euclidiana. Esto se conecta con lo que formalizaremos como "geodésica" en Cap. 8. La razón fundamental es el signo negativo del intervalo espaciotemporal.
Contracción de la longitud¶
🟡 Lina: Veamos ahora la contracción de la longitud. Piensa mirando Fig. 3.15「Representación en diagrama espaciotemporal de la contracción de la longitud」.
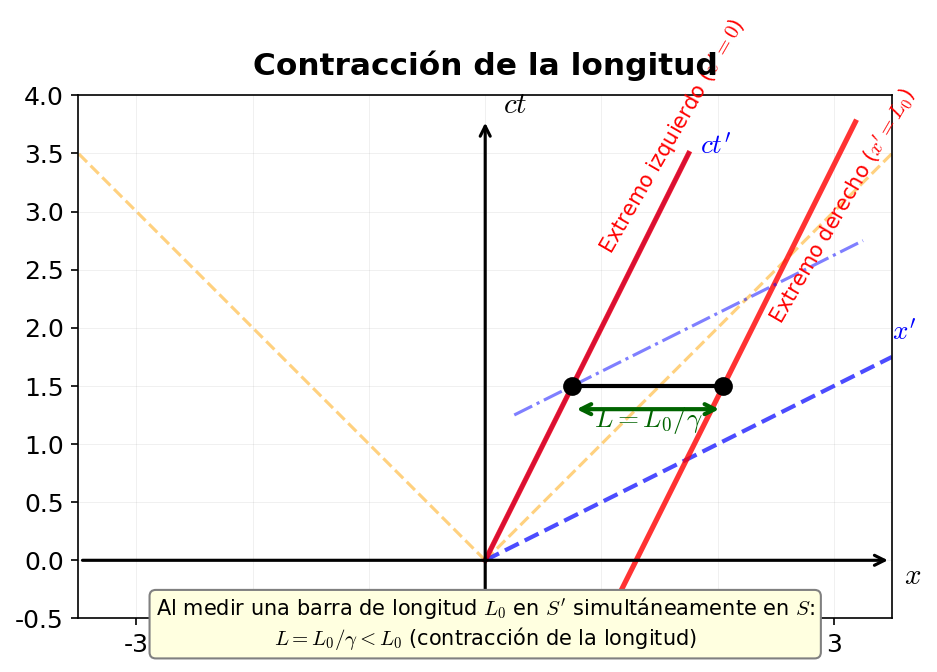
Fig. 3.15: Representación en diagrama espaciotemporal de la contracción de la longitud. Al medir "simultáneamente" en el sistema \(S\) una barra en reposo en \(S'\) (las 2 líneas de mundo rojas), la longitud propia \(L_0\) se reduce a \(L = L_0/\gamma\). La causa es que la línea de simultaneidad del sistema \(S\) (horizontal) y la del sistema \(S'\) (línea inclinada de puntos y rayas azul) son diferentes.
🟡 Lina: Supongamos que la longitud de una barra en reposo en el sistema \(S'\) es \(L_0\) (longitud propia). Si medimos las coordenadas de ambos extremos simultáneamente (\(\Delta t = 0\)) en el sistema \(S\), tomando la diferencia de la transformación de Lorentz \(x' = \gamma(x - vt)\):
Verifiquemos por qué se puede poner \(\Delta x' = L_0\). Como la barra está en reposo en el sistema \(S'\), las coordenadas \(x'\) de sus extremos son constantes en el tiempo — por ejemplo, el extremo izquierdo está siempre en \(x' = 0\) y el derecho en \(x' = L_0\). Cuando medimos ambos extremos simultáneamente (\(\Delta t = 0\)) en el sistema \(S\) y transformamos los resultados a coordenadas de \(S'\) mediante la transformación de Lorentz, en \(S'\) los dos eventos de medición pueden no ser simultáneos. Pero como la barra está en reposo, sin importar en qué instante se mire, el extremo derecho está en \(x' = L_0\) y el izquierdo en \(x' = 0\). Es decir, "la coordenada \(x'\) del extremo derecho" y "la coordenada \(x'\) del extremo izquierdo" en \(S'\) devuelven el mismo valor independientemente de cuándo se realice la medición. Por eso, aunque no sean simultáneas en \(S'\), se cumple \(\Delta x' = L_0\) (ejemplo concreto: incluso si en \(S'\) el evento de medición del extremo derecho corresponde a \(t' = 3\) y el del izquierdo a \(t' = 5\), como la barra no se mueve, la diferencia es \(L_0 - 0 = L_0\)). Así que con \(\Delta x' = L_0\) y \(\Delta x = L\):
🔵 Kai: Un objeto en movimiento se contrae en la dirección del movimiento... pero ¿está físicamente contraído de verdad? ¿O es solo que "parece así"?
🟡 Lina: El resultado de la operación de "medir la posición de ambos extremos simultáneamente" es \(L = L_0/\gamma\) — este es un efecto real como resultado de medición. Sin embargo, no es que haya una fuerza comprimiendo materialmente el interior de la barra. Como el significado de "medir simultáneamente" difiere según el sistema inercial, la misma barra se corta en secciones diferentes y aparece una longitud diferente — la diferencia en cómo se corta el espaciotiempo se manifiesta como diferencia de longitud.
⚪ Mei: La condición de "medir simultáneamente" es esencial aquí. Recordando la relatividad de la simultaneidad de antes, una medición simultánea en \(S\) no es simultánea en \(S'\) — precisamente por eso la longitud cambia.
🔵 Kai: Va contra la intuición, pero todo sale de la transformación de Lorentz. ...Pero algo que me intriga: la dilatación del tiempo y la contracción de la longitud solo difieren en si \(\gamma\) está en el numerador o en el denominador. ¿Por qué el tiempo "se estira" pero la longitud "se contrae"? ¿No podría ser al revés?
🟡 Lina: Buena pregunta. La clave es "qué se fija" en cada caso. En la dilatación del tiempo fijamos \(\Delta x' = 0\) (mismo lugar) y comparamos tiempos — fijamos el lugar en \(S'\) y el tiempo en \(S\) se multiplica por \(\gamma\). En la contracción de la longitud fijamos \(\Delta t = 0\) (simultáneo) y comparamos posiciones — fijamos el tiempo en \(S\) y la longitud de \(S'\) se divide por \(\gamma\). Como se intercambia en qué sistema se fija qué y en cuál se compara, el lado donde se multiplica \(\gamma\) se invierte.
⚪ Mei: Es decir, como el sistema donde se fija y el sistema donde se compara se intercambian, \(\gamma\) aparece en el numerador o en el denominador.
🔵 Kai: Ah, ya veo. Como "qué se fija" es diferente, el sentido del resultado se invierte. Es la misma transformación de Lorentz, pero al cambiar el ángulo de corte, las cosas se estiran o se contraen — solo estamos viendo diferentes caras de una misma transformación.
🔵 Kai: Entonces, en un caso general donde \(\Delta t' \neq 0\) y \(\Delta x' \neq 0\) sin fijar nada, ¿la dilatación del tiempo y la contracción de la longitud se mezclan?
🟡 Lina: Buena pregunta. Exactamente, en el caso general solo se pueden usar directamente las ecuaciones de la transformación de Lorentz. La dilatación del tiempo y la contracción de la longitud son solo "cortes" bajo condiciones específicas fijadas. Relatividad de la simultaneidad, dilatación del tiempo, contracción de la longitud — estos no son fenómenos separados, sino diferentes aspectos de una única regla de transformación: la transformación de Lorentz.
🔵 Kai: Entiendo... de una sola transformación, según cómo se corte, se ven diferentes caras. Dicho al revés, basta con dominar la transformación de Lorentz y todo sale de ahí. Pero me pregunto qué pasa cuando hay aceleración — si ya no es un sistema inercial, esta transformación ya no se puede usar, ¿verdad?
🟡 Lina: Exacto. Para tratar sistemas acelerados, no basta con transformaciones entre sistemas inerciales; se necesita un marco que pueda manejar "transformaciones de coordenadas arbitrarias" — eso es precisamente el escenario de la relatividad general. Lo abordaremos en serio a partir de Cap. 5. Por ahora, organicemos primero qué ocurre entre sistemas inerciales.
🔵 Kai: La relatividad especial es una teoría "limitada a sistemas inerciales", y más allá está la relatividad general — ya veo su posición dentro del panorama general.
🟡 Lina: Así es. Organicemos las tres consecuencias que salen de la transformación de Lorentz en la etapa actual.
Tabla 3.5: Comparación de las tres consecuencias físicas de la transformación de Lorentz
| Consecuencia | Condición fijada | Resultado | Fórmula |
|---|---|---|---|
| Relatividad de la simultaneidad | \(t_A = t_B\) (simultáneos en \(S\)) | No son simultáneos en \(S'\) | \(t'_A - t'_B = -\gamma v(x_A - x_B)/c^2\) |
| Dilatación del tiempo | \(\Delta x' = 0\) (mismo lugar en \(S'\)) | El tiempo se estira en \(S\) | \(\Delta t = \gamma\,\Delta t'\) |
| Contracción de la longitud | \(\Delta t = 0\) (medición simultánea en \(S\)) | Se contrae en la dirección del movimiento | \(L = L_0/\gamma\) |
✅ Verificación de comprensión: Explica en una frase la dilatación del tiempo (time dilation).
Respuesta
Un reloj en movimiento avanza más despacio que un reloj en reposo. El intervalo de tiempo \(\Delta t'\) medido en el mismo lugar del sistema \(S'\) se estira a \(\Delta t = \gamma \Delta t'\) (\(\gamma > 1\)) visto desde el sistema \(S\).
📝 Ejercicios:
- Relatividad de la simultaneidad, dilatación del tiempo, composición de velocidades → Problema M-3. Consecuencias cuantitativas de la relatividad de la simultaneidad, Problema M-4. Relación entre tiempo propio y tiempo coordenado, Problema M-5. Derivación de la regla de composición de velocidades, Problema M-6. Relatividad de la simultaneidad (ejemplo concreto)
Resumen¶
En este capítulo hemos recorrido de un tirón desde el punto de partida de la relatividad especial hasta la transformación de Lorentz y sus consecuencias físicas. Resumiendo los puntos clave:
- Dos postulados — El principio de relatividad (las leyes físicas tienen la misma forma en todos los sistemas inerciales) y el principio de invariancia de la velocidad de la luz (la velocidad de la luz \(c\) es constante independientemente del observador). De solo estos dos se deduce todo lo siguiente.
- Intervalo espaciotemporal \(ds^2\) — De la invariancia de la velocidad de la luz se determina \(ds^2 = -(cdt)^2 + dx^2 + dy^2 + dz^2\) como un tensor de rango 0 (invariante escalar) invariante en todos los sistemas inerciales. El signo negativo en el término temporal es la diferencia decisiva respecto a la geometría euclidiana.
- Transformación de Lorentz — La transformación de coordenadas que preserva \(ds^2\). Es la "versión corregida que tiene en cuenta la velocidad de la luz" de la transformación de Galileo, y se reduce a la transformación de Galileo en el límite \(v \ll c\). Geométricamente es una rotación hiperbólica en el plano \(t\)-\(x\), con la misma estructura que las rotaciones espaciales (\(\cos \to \cosh\), \(\sin \to \sinh\)).
- Consecuencias físicas — Relatividad de la simultaneidad, dilatación del tiempo \(\Delta t = \gamma \Delta t'\), contracción de la longitud \(L = L_0/\gamma\). Todas surgen inevitablemente al aceptar la invariancia de la velocidad de la luz. El "tiempo absoluto y espacio absoluto" de Newton no se cumplen.
Adelanto del siguiente capítulo¶
En Cap. 4, reescribiremos el contenido físico obtenido en este capítulo en el lenguaje matemático necesario para avanzar hacia la relatividad general. Prepararemos el sistema de unidades naturales (\(c = 1\)), la notación con índices, la convención de suma de Einstein, la métrica de Minkowski \(\eta_{\mu\nu}\), los 4-vectores, los vectores covariantes y los rudimentos de los tensores. Las herramientas que reuniremos aquí se usarán directamente a partir de Cap. 5 cuando tratemos "espaciotiempos curvados".
Referencias¶
- Hartle, J. B. Gravity: An Introduction to Einstein's General Relativity, Chapters 4–5. Addison-Wesley, 2003.
- Schutz, B. F. A First Course in General Relativity, 3rd ed., Chapter 1. Cambridge University Press, 2022.
- Tong, D. General Relativity, Chapter 1. University of Cambridge lecture notes, 2019.
- Landau, L. D. and Lifshitz, E. M. The Classical Theory of Fields, 4th ed., §1–4. Butterworth-Heinemann, 1975.(ランダウ・リフシッツ『場の古典論』東京図書)
- 砂川重信『理論電磁気学』第 12 章. 紀伊國屋書店, 1999.
- 佐藤勝彦『相対性理論』岩波基礎物理シリーズ, 第 1–4 章. 岩波書店, 1996.
- 石井俊全『一般相対性理論を一歩一歩数式で理解する』第 8–9 章. ベレ出版, 2013.
- Lancaster, T. and Blundell, S. J. General Relativity for the Gifted Amateur, Chapter 1. Oxford University Press, 2014.
Feedback on this page
Let us know if something was unclear, incorrect, or could be improved.