Capítulo 6 Coordenadas curvilíneas y tensor métrico¶
Resumen de capítulos anteriores: En Cap. 5, a partir de los experimentos mentales del ascensor en caída libre y el cohete acelerado, dedujimos el principio de equivalencia (principio de equivalencia de Einstein). La aceleración y la gravedad son localmente indistinguibles — es decir, la gravedad podría no ser una "fuerza" sino una "propiedad del propio espaciotiempo". Si es así, necesitamos herramientas matemáticas para describir un "espaciotiempo curvado".
Objetivo de este capítulo
- Comprender el mecanismo de las transformaciones de coordenadas (matriz jacobiana) y el significado del tensor métrico \(g_{\mu\nu}\) usando como ejemplos concretos las coordenadas curvilíneas (polares y esféricas)
- Ser capaz de expresar matemáticamente qué significa que "la regla de medir cambia según el lugar", y además distinguir que "la curvatura de las coordenadas" y "la curvatura del espacio" son conceptos diferentes
- Esto constituye la base indispensable para tratar espaciotiempos curvados (como la métrica de Schwarzschild) en los capítulos siguientes
Sistema de unidades de este capítulo: Para hacer explícita la correspondencia con la relatividad especial, usamos el sistema SI con \(c\) explícito. Las coordenadas del espaciotiempo 4-dimensional son \((t, x, y, z)\) (\(x^0 = t\)), a diferencia del \((ct, x, y, z)\) de los capítulos anteriores. Para las reglas de transformación, consulta Appendix D.6.
6.1 ¿Por qué las coordenadas cartesianas no son suficientes?¶
🟡 Lina: En el capítulo anterior llegamos a la idea de que "la gravedad es la curvatura del espaciotiempo". Pero para describir un "espaciotiempo curvado", primero necesitamos familiarizarnos con el manejo de coordenadas en un "espacio no curvado".
🔵 Kai: Eh, ¿pero si el espacio no está curvado, no basta con las coordenadas \(x, y, z\) normales?
🟡 Lina: Es cierto que en un espacio plano todo se puede escribir en coordenadas cartesianas. Pero hay muchas situaciones en las que queremos usar otras coordenadas que se adapten a la simetría del problema. Por ejemplo, si describes un movimiento circular en \(x, y\), las ecuaciones se vuelven complicadas, pero en coordenadas polares \((r, \theta)\) la visión es mucho más clara, ¿verdad?
🟡 Lina: Además, hay una razón más fundamental. En un espaciotiempo curvado — por ejemplo, una esfera — simplemente no existen coordenadas cartesianas que cubran todo el espacio. Piensa en la superficie de la Tierra. Es imposible cubrir toda la Tierra sin distorsión con coordenadas planas \(x, y\). Por eso, el manejo de coordenadas curvilíneas es una herramienta imprescindible para avanzar hacia la relatividad general.
⚪ Mei: Claro, que no se puede cubrir una esfera con coordenadas planas se ve incluso mirando un atlas. Cualquier proyección cartográfica introduce distorsiones.
🔵 Kai: Ya veo… primero practicamos "cambiar coordenadas" en un espacio plano, y después pasamos a un espacio realmente curvado.
🟡 Lina: Exacto. En este capítulo, introduciendo coordenadas polares y esféricas en un espacio plano, primero entenderemos la situación en la que las coordenadas están curvadas pero el espacio en sí no lo está. Sobre esa base, formularemos matemáticamente "la forma de medir distancias".
✅ Verificación de comprensión: ¿Es posible introducir coordenadas cartesianas que cubran completamente un espacio curvado (por ejemplo, una esfera)?
Respuesta
No es posible. En un espacio curvado como una esfera, no existen coordenadas cartesianas que lo cubran completamente sin distorsión. Esta es una de las razones fundamentales para aprender el manejo de coordenadas curvilíneas.
✅ Verificación de comprensión: ¿Son "la curvatura de las coordenadas" y "la curvatura del espacio" el mismo concepto?
Respuesta
Son conceptos diferentes. Incluso en un espacio plano, si usamos coordenadas curvilíneas (como las polares), las líneas coordenadas se curvan, pero el espacio en sí no está curvado. Es importante no confundir ambos.
6.2 Ejemplos concretos de coordenadas curvilíneas¶
Coordenadas polares (2 dimensiones)¶
🟡 Lina: Las coordenadas curvilíneas más familiares son las coordenadas polares (polar coordinates) del plano bidimensional. Un punto \(P\) en el plano se especifica mediante la distancia \(r\) desde el origen y el ángulo \(\theta\) medido desde la dirección positiva del eje \(x\). Mira la Fig. 6.1「Comparación entre coordenadas cartesianas y polares」.
La relación con las coordenadas cartesianas \((x, y)\) es:
Inversamente:
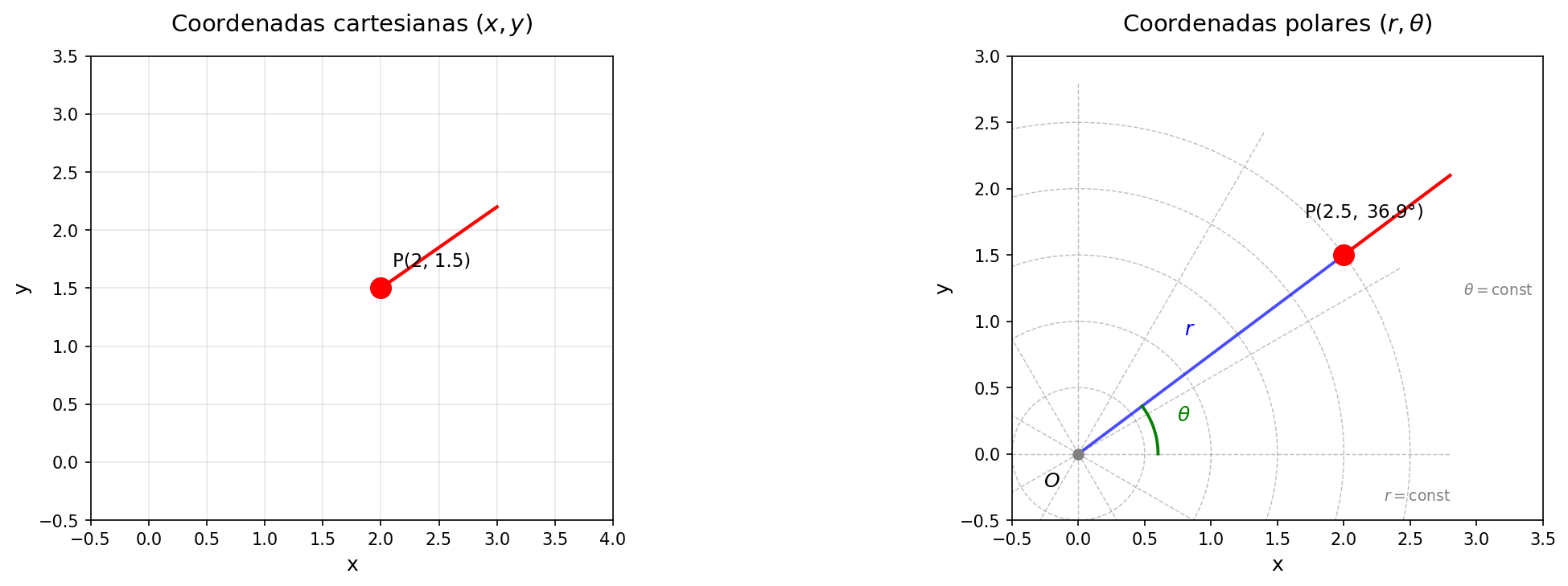
Fig. 6.1: Comparación entre coordenadas cartesianas y polares. El mismo punto P se representa en coordenadas cartesianas (izquierda) y polares (derecha).
🔵 Kai: Esto ya lo vimos en el instituto.
🟡 Lina: Entonces te pregunto. Las líneas coordenadas de las coordenadas polares — es decir, la línea que se obtiene "fijando \(r\) y variando solo \(\theta\)" y la línea que se obtiene "fijando \(\theta\) y variando solo \(r\)" — ¿qué forma tienen?
🔵 Kai: La línea con \(r\) constante es un círculo centrado en el origen, y la línea con \(\theta\) constante es una recta que parte del origen.
🟡 Lina: Así es. Como las líneas coordenadas no son rectas, las llamamos "coordenadas curvilíneas". Pero lo importante es que el hecho de que las líneas coordenadas estén curvadas no significa que el espacio en sí esté curvado. Aunque dibujes coordenadas polares sobre un papel, el papel sigue siendo plano, ¿verdad?
⚪ Mei: La distinción entre "curvatura de las coordenadas" y "curvatura del espacio" que mencionaste en §1. Las coordenadas polares son justamente un ejemplo concreto de eso.
Coordenadas esféricas (3 dimensiones)¶
🟡 Lina: Extendamos a 3 dimensiones. Especificar un punto \(P\) en el espacio mediante la distancia \(r\) desde el origen, el ángulo \(\theta\) (theta, ángulo cenital) desde el eje \(z\), y el ángulo \(\varphi\) (phi, ángulo azimutal) en el plano \(xy\), son las coordenadas esféricas (spherical coordinates). Mira la Fig. 6.2「Definición de coordenadas esféricas \((r, \theta, \varphi)\)」.
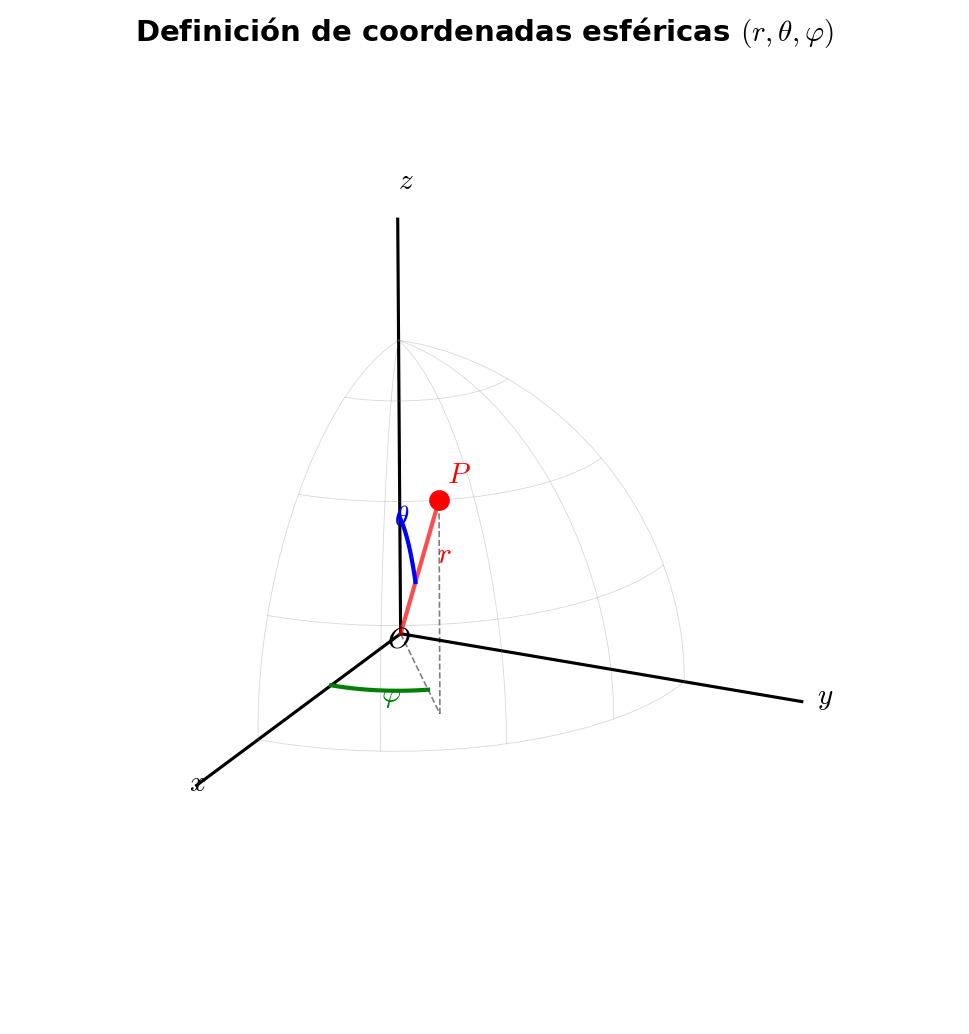
Fig. 6.2: Definición de coordenadas esféricas \((r, \theta, \varphi)\). La distancia desde el origen O hasta el punto P es \(r\), el ángulo desde el eje \(z\) es el ángulo cenital \(\theta\), y el ángulo entre la proyección sobre el plano \(xy\) y el eje \(x\) es el ángulo azimutal \(\varphi\).
La relación con las coordenadas cartesianas es:
🔵 Kai: Es como la latitud y la longitud de la Tierra.
🟡 Lina: Sí. Pero ten en cuenta que el ángulo cenital \(\theta\) se mide desde el polo norte, así que difiere en \(90°\) de la "latitud" geográfica.
6.3 Transformaciones de coordenadas y la matriz jacobiana¶
🟡 Lina: Bien, ahora vamos al tema principal. Cuando cambiamos las coordenadas, ¿cómo se transforma un "desplazamiento infinitesimal"? La herramienta para tratar esto sistemáticamente es la matriz jacobiana (Jacobi matrix).
Transformación del desplazamiento infinitesimal¶
🟡 Lina: Encontremos la relación entre el desplazamiento infinitesimal \((dx, dy)\) en coordenadas cartesianas \((x, y)\) y el desplazamiento infinitesimal \((dr, d\theta)\) en coordenadas polares \((r, \theta)\). \(x = r\cos\theta\) es una función de dos variables \(r\) y \(\theta\), ¿verdad? Cuando \(r\) y \(\theta\) cambian simultáneamente un poco, ¿cuánto cambia \(x\)? Para una función de una variable \(f(x)\), podíamos escribir \(df = f'(x)\,dx\). Con dos variables se aplica la misma idea: si el cambio es suficientemente pequeño, podemos calcular independientemente el cambio debido solo a \(r\) y el cambio debido solo a \(\theta\), y sumarlos. Esta operación de "sumar las contribuciones de cada variable para expresar el cambio total" se llama diferencial total (total differential):
Aquí \(\dfrac{\partial x}{\partial r}\) es "la tasa de cambio de \(x\) cuando solo varía \(r\) manteniendo \(\theta\) fijo" (derivada parcial), y \(\dfrac{\partial x}{\partial \theta}\) es "la tasa de cambio de \(x\) cuando solo varía \(\theta\) manteniendo \(r\) fijo". Es la extensión natural de la diferencial de una variable \(df = f'(x)\,dx\).
🔵 Kai: Ah, "sumar las contribuciones de cada dirección" funciona porque el cambio es suficientemente pequeño y vale la superposición.
🟡 Lina: Exacto. Calculando explícitamente:
De forma análoga, a partir de \(y = r\sin\theta\):
En forma matricial:
⚪ Mei: Es decir, con esta sola matriz se puede escribir completamente "la transformación del desplazamiento infinitesimal de coordenadas polares al desplazamiento infinitesimal en coordenadas cartesianas".
🟡 Lina: A la matriz \(2 \times 2\) del lado derecho la llamamos matriz jacobiana. En general, a veces numeramos las coordenadas y las escribimos como \((x^1, x^2)\), \((u^1, u^2)\). En este ejemplo, \((x^1, x^2) = (x, y)\) corresponde a las coordenadas cartesianas y \((u^1, u^2) = (r, \theta)\) a las coordenadas polares. Lo que hay que tener en cuenta es que estos números en superíndice no son potencias sino números (índices) de coordenadas. \(x^2\) no significa "\(x\) al cuadrado" sino "la segunda coordenada" (es decir, \(y\)). Es confuso, pero esta notación es estándar en el cálculo tensorial.
Con esta notación, cuando escribimos las coordenadas \((x^1, x^2)\) como funciones de las coordenadas \((u^1, u^2)\) — es decir, usando la relación "dadas las coordenadas \(u\), quedan determinadas las coordenadas \(x\)" —
es la matriz cuyas componentes forman la matriz jacobiana.
🔵 Kai: \(x^2\) no es "\(x\) al cuadrado" sino "la segunda coordenada"… al principio va a ser confuso. ¿No se confunde con las potencias?
🟡 Lina: Solo se puede distinguir por el contexto. Pero en la práctica, cuando numeramos coordenadas siempre se usan superíndices, así que por ejemplo en coordenadas polares \(u^1 = r\), \(u^2 = \theta\). Al ver "\(u^2 = \theta\)" no vas a pensar "¿\(u\) al cuadrado es theta?", ¿verdad? Cuando se necesita una potencia, se usan paréntesis como \((u^1)^2\).
⚪ Mei: Es decir, cada componente representa "cuánto se mueve la coordenada antigua cuando se mueve un poco la nueva coordenada".
🔵 Kai: El punto clave es que las componentes de esta matriz no son constantes. Dependen de \(r\) y \(\theta\).
🟡 Lina: Buena observación. La matriz de la transformación de Lorentz era constante, pero en transformaciones de coordenadas generales, la matriz de transformación difiere de un lugar a otro. Esta es la novedad esencial de las coordenadas curvilíneas. Si miras la Fig. 6.3「El mismo plano bidimensional cubierto por dos sistemas de coordenadas」, puedes ver que mientras la malla de coordenadas cartesianas tiene intervalos uniformes, la malla de coordenadas polares tiene intervalos que cambian según el lugar.
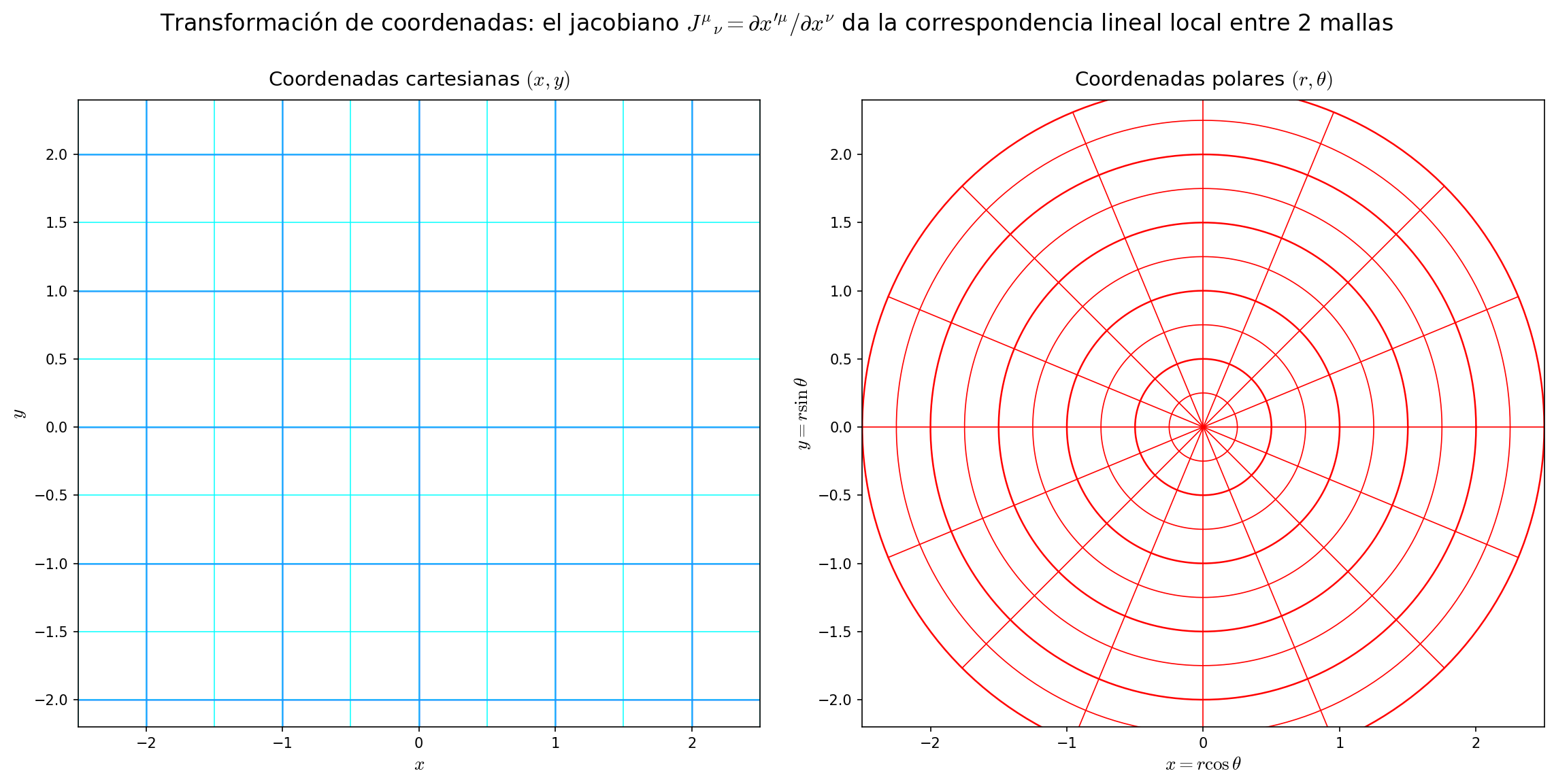
Fig. 6.3: El mismo plano bidimensional cubierto por dos sistemas de coordenadas. La malla cartesiana (izquierda) tiene intervalos uniformes, paralelos y ortogonales; la polar (derecha) se dispone radialmente centrada en el origen. La transformación lineal que conecta el mismo desplazamiento infinitesimal medido como (a) \((dx, dy)\) o (b) \((dr, d\theta)\) es la matriz jacobiana \(J^i{}_j = \partial x^i/\partial u^j\). Que esta matriz difiera de un lugar a otro es la característica esencial de las coordenadas curvilíneas.
✅ Verificación de comprensión: ¿Cuál es la diferencia decisiva entre la matriz de transformación de Lorentz y la matriz jacobiana de una transformación general a coordenadas curvilíneas?
Respuesta
La matriz de la transformación de Lorentz es constante (no depende del lugar), mientras que la matriz jacobiana de una transformación general a coordenadas curvilíneas depende de los valores de las coordenadas (del lugar). Esta es la novedad esencial de las coordenadas curvilíneas.
Transformación inversa y la matriz inversa de la jacobiana¶
🟡 Lina: Consideremos también la transformación en dirección inversa. Derivando parcialmente \(r = \sqrt{x^2 + y^2}\), \(\theta = \arctan(y/x)\):
(Pista: \(r = \sqrt{x^2 + y^2} = (x^2 + y^2)^{1/2}\), así que por la regla de la cadena \(\partial r/\partial x = \frac{1}{2}(x^2+y^2)^{-1/2}\cdot 2x = x/\sqrt{x^2+y^2}\). \(\partial r/\partial y\) se obtiene análogamente como \(y/\sqrt{x^2+y^2}\). Para \(\theta\), en la región \(x > 0\) tomamos \(\theta = \arctan(y/x)\) y aplicamos la fórmula de derivación de la función trigonométrica inversa \((\arctan u)' = 1/(1 + u^2)\) (abre la nota desplegable justo debajo para ver la derivación) junto con la regla de la cadena. \(\partial\theta/\partial x\): sea \(u = y/x\), entonces \(\partial u/\partial x = -y/x^2\), luego \(\partial\theta/\partial x = \frac{1}{1+(y/x)^2}\cdot(-y/x^2) = -y/(x^2+y^2)\). \(\partial\theta/\partial y\): igualmente \(u = y/x\) con \(\partial u/\partial y = 1/x\), luego \(\partial\theta/\partial y = \frac{1}{1+(y/x)^2}\cdot(1/x) = x/(x^2+y^2)\).)
::: {.callout-note collapse="true" title="Complemento: Derivación de \((\arctan u)' = 1/(1+u^2)\)"} Sea \(\theta = \arctan u\), entonces \(\tan\theta = u\). Derivando ambos lados respecto a \(u\), el lado izquierdo por la regla de la cadena da \(\frac{1}{\cos^2\theta}\cdot\frac{d\theta}{du}\), y el derecho es 1. Por tanto \(\frac{d\theta}{du} = \cos^2\theta\). Como \(1 + \tan^2\theta = 1/\cos^2\theta\) (se obtiene dividiendo \(\sin^2\theta + \cos^2\theta = 1\) entre \(\cos^2\theta\)), tenemos \(\cos^2\theta = 1/(1 + u^2)\). En conclusión, \((\arctan u)' = 1/(1 + u^2)\). :::
En forma matricial:
🟡 Lina: Multipliquemos estas dos matrices jacobianas. Deberían ser inversas la una de la otra. Mei, ¿puedes hacer el cálculo?
⚪ Mei: Lo intento.
Componente \((1,1)\): \(\cos\theta \cdot \cos\theta + (-r\sin\theta) \cdot \left(-\dfrac{\sin\theta}{r}\right) = \cos^2\theta + \sin^2\theta = 1\)
Componente \((1,2)\): \(\cos\theta\sin\theta - r\sin\theta \cdot \dfrac{\cos\theta}{r} = 0\)
Componente \((2,1)\): \(\sin\theta \cdot \cos\theta + r\cos\theta \cdot \left(-\dfrac{\sin\theta}{r}\right) = \sin\theta\cos\theta - \sin\theta\cos\theta = 0\)
Componente \((2,2)\): \(\sin^2\theta + r\cos\theta \cdot \dfrac{\cos\theta}{r} = 1\)
El resultado es la matriz identidad. Es decir, las dos matrices jacobianas son mutuamente inversas.
🟡 Lina: Exacto. Este es un teorema que se cumple de forma general. Se puede demostrar en una línea usando la regla de la cadena (chain rule). Aquí confirmemos de nuevo el convenio de suma de Einstein — el convenio introducido en Cap. 2 de que "cuando en la misma expresión aparece el mismo índice arriba y abajo, se suma sobre ese índice". Por ejemplo, si escribimos \(A^j B_j\), significa \(\sum_j A^j B_j = A^1 B_1 + A^2 B_2 + \cdots\). En 2 dimensiones, \(A^j B_j = A^1 B_1 + A^2 B_2\). Como no hay que escribir \(\sum\) cada vez, se usa de forma estándar en el cálculo tensorial. En este capítulo también lo aplicaremos a los índices de las derivadas parciales, así que recuerda bien la regla.
🔵 Kai: "El mismo índice arriba y abajo"… ¿cómo se determina qué es arriba y qué es abajo? Si está escrito explícitamente arriba y abajo como en la matriz jacobiana \(J^i{}_j\) lo entiendo, pero ¿con las derivadas parciales?
🟡 Lina: Buena pregunta. Para las derivadas parciales, la regla es la siguiente: un índice en el numerador cuenta como "arriba", y un índice en el denominador cuenta como "abajo". Por ejemplo, en \(\dfrac{\partial x^i}{\partial u^j}\), \(i\) está en el numerador así que es "arriba", y \(j\) está en el denominador así que es "abajo". Intuitivamente, \(dx^i\) es una cantidad de cambio de coordenada con índice superíndice, y \(\partial u^j\) está en el denominador — "el lado por el que se divide" — así que se vuelve subíndice. Por qué esta distinción es fundamental lo entenderás cuando estudies sistemáticamente "contravariante y covariante" en el próximo capítulo; por ahora basta con recordar la regla "numerador es arriba, denominador es abajo".
🔵 Kai: Ya veo, en \(\dfrac{\partial x^i}{\partial u^j}\), \(i\) es arriba y \(j\) es abajo… y en \(\dfrac{\partial u^j}{\partial x^k}\), \(j\) está en el numerador así que es arriba. Es decir, \(j\) aparece tanto abajo como arriba — por lo que se suma sobre \(j\).
🟡 Lina: Exacto. Usando este convenio, la regla de la cadena se escribe así:
Mira el lado izquierdo. En el primer factor \(\dfrac{\partial x^i}{\partial u^j}\), \(j\) está abajo (denominador); en el segundo factor \(\dfrac{\partial u^j}{\partial x^k}\), \(j\) está arriba (numerador) — es decir, \(j\) aparece tanto arriba como abajo, así que se suma sobre \(j\). Expandido explícitamente significa \(\sum_{j} \dfrac{\partial x^i}{\partial u^j}\dfrac{\partial u^j}{\partial x^k}\).
⚪ Mei: Solo siguiendo la posición arriba/abajo de los índices se determina automáticamente "dónde va la suma". Una vez que te acostumbras, parece más práctico que escribir \(\sum\).
🟡 Lina: Escribiéndolo explícitamente en 2 dimensiones, por ejemplo para \(i = 1\), \(k = 1\):
Esto dice que la operación de "volver de \(x\) a \(x\) mismo pasando por \((r, \theta)\)" es la transformación identidad. El \(\delta^i_k\) que aparece en el lado derecho se llama delta de Kronecker (Kronecker delta) y se define como 1 si \(i = k\) y 0 si \(i \neq k\). Es decir, es simplemente la simbolización de algo obvio: "si derivas \(x^i\) respecto a \(x^k\), da 1 para la misma coordenada (\(i = k\)) y 0 para coordenadas diferentes (\(i \neq k\))". Concretamente, si \(x^1 = x\), \(x^2 = y\), entonces \(\partial x / \partial x = 1\), \(\partial x / \partial y = 0\) — como \(x\) e \(y\) son coordenadas independientes, cambiar una no afecta a la otra. En 2 dimensiones, \(\delta^1_1 = 1\), \(\delta^1_2 = 0\), \(\delta^2_1 = 0\), \(\delta^2_2 = 1\), así que escrito como matriz es exactamente las componentes de la matriz identidad \(\begin{pmatrix}1 & 0\\0 & 1\end{pmatrix}\). Que los índices estén separados arriba y abajo es simplemente para coincidir con la posición de los índices del lado izquierdo.
🔵 Kai: Es decir, "la matriz de transformación de ida" y "la de vuelta" siempre tienen una relación de matrices inversas.
✅ Verificación de comprensión: ¿Qué relación existe entre la matriz jacobiana de la transformación de coordenadas \(x^i(u^j)\) y la de la transformación inversa \(u^j(x^i)\)?
Respuesta
Son mutuamente inversas. Esto se cumple porque por la regla de la cadena \(\frac{\partial x^i}{\partial u^j}\frac{\partial u^j}{\partial x^k} = \delta^i_k\).
✅ Verificación de comprensión: ¿Qué es la matriz jacobiana?
Respuesta
Es la matriz cuyas componentes son las derivadas parciales \(J^i{}_j = \partial x^i / \partial u^j\) de la transformación de coordenadas \(x^i = x^i(u^1, u^2, \ldots)\). Describe cómo se transforman los desplazamientos infinitesimales. A diferencia de la transformación de Lorentz, en transformaciones de coordenadas generales sus componentes varían de un lugar a otro.
📝 Ejercicios:
6.4 Expresar la "distancia" en coordenadas — Introducción del tensor métrico¶
Motivación: la distancia no cambia aunque cambien las coordenadas¶
🟡 Lina: Bien, aquí está el núcleo de este capítulo. Una de las cantidades más fundamentales en física es "la distancia entre dos puntos". La distancia no depende de la elección de coordenadas — la distancia de Tokio a Nueva York no cambia por cambiar la forma de dibujar el mapa, ¿verdad?
🔵 Kai: Sí, es obvio.
🟡 Lina: Sin embargo, la fórmula para calcular la distancia sí cambia según las coordenadas. En coordenadas cartesianas es directamente el teorema de Pitágoras:
¿Y en coordenadas polares? Sustituye \(dx = \cos\theta\,dr - r\sin\theta\,d\theta\), \(dy = \sin\theta\,dr + r\cos\theta\,d\theta\).
⚪ Mei: Lo calculo.
Expandiendo el primer término:
Expandiendo el segundo término:
🔵 Kai: ¡Ah, los términos con \(dr\,d\theta\) tienen signos opuestos y parece que se van a cancelar!
⚪ Mei: Exacto. Sumando, los términos cruzados se cancelan y queda:
🔵 Kai: ¡Oh, quedó muy limpio! Pero… hay un \(r^2\) delante de \(d\theta^2\). En coordenadas cartesianas era \(dx^2 + dy^2\) con todos los coeficientes iguales a 1.
🟡 Lina: Sí. Aquí está el punto clave. En coordenadas polares, la distancia real que se recorre al cambiar \(\theta\) en 1 radián depende de la distancia \(r\) al origen. Si \(r = 1\), un radián da una distancia de 1, pero si \(r = 10\), un radián da una distancia de 10. Por eso aparece el "peso" \(r^2\) delante de \(d\theta^2\).
🔵 Kai: Es decir, aunque el \(d\theta\) sea el mismo, la "distancia real" es diferente según el lugar.
🟡 Lina: Exacto. Esa es la verdadera naturaleza de lo que significa "la regla de medir cambia según el lugar". Mirando la Fig. 6.4「Significado de la métrica en coordenadas polares」, se ve de un vistazo que para el mismo \(d\theta\), cuanto mayor es \(r\), mayor es la longitud del arco.
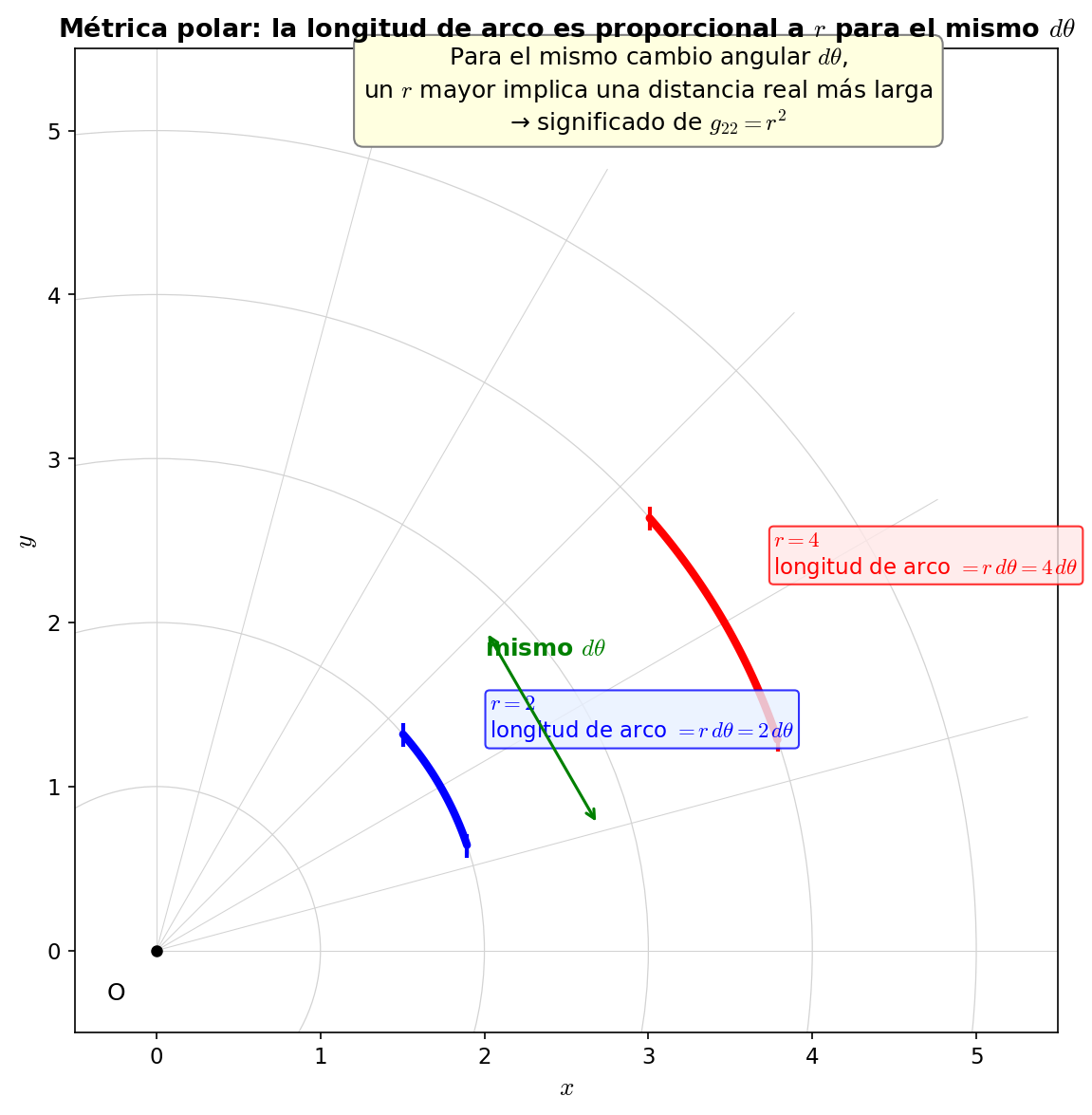
Fig. 6.4: Significado de la métrica en coordenadas polares. Para el mismo cambio angular \(d\theta\), cuanto mayor es la distancia al origen \(r\), mayor es la longitud real del arco \(r\,d\theta\). Este es el significado geométrico de \(g_{22} = r^2\).
✅ Verificación de comprensión: En el elemento de línea en coordenadas polares \(ds^2 = dr^2 + r^2\,d\theta^2\), ¿cuál es el significado físico de que \(r^2\) multiplique a \(d\theta^2\)?
Respuesta
Significa que aunque se cambie el ángulo \(\theta\) la misma cantidad, cuanto mayor sea la distancia \(r\) al origen, mayor será la distancia real recorrida. Es decir, el ancho de las divisiones de la "regla de medir" en la dirección \(\theta\) cambia proporcionalmente a \(r\).
Definición del tensor métrico \(g_{ij}\)¶
🟡 Lina: La herramienta para escribir de forma general esta "fórmula de la distancia" es el tensor métrico (metric tensor) \(g_{ij}\).
Usando coordenadas \((u^1, u^2)\) — en coordenadas polares \((u^1, u^2) = (r, \theta)\) — el cuadrado de la distancia infinitesimal se escribe:
Aquí estamos usando el convenio de suma de Einstein introducido en §3 — mira \(g_{ij}\,du^i\,du^j\). El índice \(i\) aparece como subíndice en \(g_{ij}\) y como superíndice en \(du^i\) — es decir, el mismo índice \(i\) aparece tanto arriba como abajo, así que se suma sobre \(i\). Igualmente, \(j\) aparece abajo en \(g_{ij}\) y arriba en \(du^j\), así que también se suma sobre \(j\). Es decir, \(g_{ij}\,du^i\,du^j = \sum_{i=1}^{2}\sum_{j=1}^{2} g_{ij}\,du^i\,du^j\) en forma abreviada. En 2 dimensiones (\(i, j\) recorren de 1 a 2), escribiendo explícitamente los 4 términos:
🔵 Kai: ¿\(g_{12}\) y \(g_{21}\) son componentes diferentes?
🟡 Lina: Buena pregunta. En realidad, como \(du^1\,du^2 = du^2\,du^1\) (es simplemente multiplicación de números), podemos escribir \(g_{12}\,du^1\,du^2 + g_{21}\,du^2\,du^1 = (g_{12} + g_{21})\,du^1\,du^2\). Solo la suma "\(g_{12} + g_{21}\)" tiene significado. Por eso adoptamos el convenio de tomar siempre \(g_{12} = g_{21}\) de forma simétrica. En general, en \(n\) dimensiones, el tensor métrico satisface la condición de simetría \(g_{ij} = g_{ji}\). Como es una matriz simétrica, para \(n \times n\) hay \(n(n+1)/2\) componentes independientes — \(n\) componentes diagonales y \(n(n-1)/2\) en la parte triangular superior. En 2 dimensiones son 3: \(g_{11}, g_{12} = g_{21}, g_{22}\). En un espaciotiempo 4-dimensional, \(n = 4\) da \(4 \times 5 / 2 = 10\). En el capítulo anterior aprendimos que "la gravedad es la curvatura del espaciotiempo". Lo que describe la forma en que se curva el espaciotiempo — es decir, "cómo cambia la regla de medir de un lugar a otro" — es precisamente este tensor métrico \(g_{\mu\nu}\).
🔵 Kai: 3 en 2 dimensiones, 10 en 4 dimensiones… aumenta rápido. En la gravedad newtoniana, el potencial \(\Phi\) era una sola función. ¿Qué se vuelve tan complicado como para necesitar 10?
🟡 Lina: La gravedad newtoniana solo describía "la intensidad de la fuerza con que se atraen las masas", pero en relatividad general se describe la geometría completa del espaciotiempo, incluyendo la dilatación temporal y la distorsión espacial. Por eso una sola función no basta y se necesitan 10 — lo que significa que la descripción de la gravedad se vuelve mucho más rica.
⚪ Mei: Claro, como se describe la distorsión tanto del tiempo como del espacio, se necesitan muchas componentes.
🟡 Lina: Bien, volvamos al tema. Leamos concretamente las componentes del tensor métrico de las coordenadas polares.
⚪ Mei: En coordenadas polares, como \(ds^2 = dr^2 + r^2\,d\theta^2\), comparando:
En forma matricial:
🔵 Kai: ¿Y en coordenadas cartesianas, qué forma tiene \(g_{ij}\)?
🟡 Lina: Como \(ds^2 = dx^2 + dy^2\):
La matriz identidad — es decir, la delta de Kronecker. Un sistema de coordenadas en el que el tensor métrico es la matriz identidad son las coordenadas cartesianas.
🔵 Kai: Ya veo. Las coordenadas cartesianas son "especialmente simples" porque el tensor métrico es una matriz identidad constante. Entonces, al revés, en un sistema de coordenadas donde el tensor métrico no es la identidad, ¿solo se complica el cálculo de distancias, pero el contenido físico no cambia?
🟡 Lina: Si solo estamos cambiando coordenadas dentro de un espacio plano, así es — solo cambia la apariencia del cálculo, la física es la misma. Pero en un espacio realmente curvado la situación es diferente. Veámoslo a continuación.
🔵 Kai: Me intriga saber qué cambia en un "espacio realmente curvado"…
✅ Verificación de comprensión: ¿Por qué el tensor métrico \(g_{ij}\) es simétrico (\(g_{ij} = g_{ji}\))?
Respuesta
Porque en \(ds^2 = g_{ij}\,du^i\,du^j\), se tiene \(du^i\,du^j = du^j\,du^i\) (es simplemente el producto de números), de modo que solo la suma de \(g_{ij}\) y \(g_{ji}\) tiene significado físico. Por eso se adopta el convenio de tomarlo siempre simétrico.
✅ Verificación de comprensión: Escribe el tensor métrico \(g_{ij}\) de las coordenadas polares en forma matricial.
Respuesta
\(g_{ij} = \begin{pmatrix} 1 & 0 \\ 0 & r^2 \end{pmatrix}\). \(g_{22} = r^2\) expresa que "la distancia real por cada unidad de coordenada en la dirección \(\theta\) es proporcional a \(r\)".
Tensor métrico en coordenadas esféricas¶
🟡 Lina: Hagamos lo mismo en coordenadas esféricas 3D \((r, \theta, \varphi)\). Reescribimos \(dx^2 + dy^2 + dz^2\) en coordenadas esféricas. El procedimiento es el mismo que en 2 dimensiones — encontramos la diferencial total de cada \(x, y, z\), la elevamos al cuadrado y sumamos. \(dx = \sin\theta\cos\varphi\,dr + r\cos\theta\cos\varphi\,d\theta - r\sin\theta\sin\varphi\,d\varphi\) y así con 3 variables, por lo que hay más términos, pero el mecanismo es exactamente el mismo que en 2 dimensiones. Al expandir \(dx^2 + dy^2 + dz^2\) aparecen términos cruzados (\(dr\,d\theta\), \(dr\,d\varphi\), \(d\theta\,d\varphi\)), pero al sumar las contribuciones de los tres \(x, y, z\), gracias a \(\sin^2\alpha + \cos^2\alpha = 1\), todos se cancelan.
🔵 Kai: En 2 dimensiones los términos cruzados también se cancelaron limpiamente, y en 3 dimensiones ocurre lo mismo.
🟡 Lina: Pista: por ejemplo, mirando el coeficiente de \(dr\,d\theta\), de \(dx^2\) sale \(2r\sin\theta\cos\theta\cos^2\varphi\), de \(dy^2\) sale \(2r\sin\theta\cos\theta\sin^2\varphi\), y de \(dz^2\) sale \(-2r\sin\theta\cos\theta\); al sumarlos da \(2r\sin\theta\cos\theta(\cos^2\varphi + \sin^2\varphi - 1) = 0\) y se cancela. El término cruzado \(dr\,d\varphi\) también se cancela por la misma identidad \(\cos^2\varphi + \sin^2\varphi - 1 = 0\), y el término cruzado \(d\theta\,d\varphi\) se cancela porque la contribución de \(dx^2\), \(-2r^2\sin\theta\cos\theta\sin\varphi\cos\varphi\), y la de \(dy^2\), \(+2r^2\sin\theta\cos\theta\sin\varphi\cos\varphi\), se anulan mutuamente (de \(dz^2\) no sale ningún término con \(d\varphi\) así que la contribución es cero). Todos los cálculos los puedes verificar en el problema Problema M-2. Derivación del elemento de línea en coordenadas esféricas. El resultado es:
⚪ Mei: Por lo tanto, el tensor métrico es:
🔵 Kai: Que \(r^2\sin^2\theta\) multiplique a \(d\varphi^2\) es porque… ¡ah, cerca del ecuador (\(\theta = \pi/2\)) cambiar la longitud en 1 radián desplaza una distancia \(r\), pero cerca del polo norte (\(\theta \approx 0\)) casi no te mueves! Pero en \(\theta = 0\) (polo norte), \(g_{33} = 0\). ¿Una componente del tensor métrico igual a cero no causa problemas?
🟡 Lina: Buena pregunta. \(g_{33} = 0\) significa "cambiar \(\varphi\) da un desplazamiento cero" — es decir, en el polo norte todas las líneas de longitud convergen en un punto, así que la diferencia de longitud no tiene significado físico. La coordenada \(\varphi\) está definida, pero allí el ancho de las divisiones de la "regla" en la dirección \(\varphi\) se hace cero. Esto se llama singularidad de coordenadas (coordinate singularity) y no significa que el espacio en sí esté roto — usando otras coordenadas se puede describir sin problemas. Es fácil de entender pensando en la Tierra. Sobre el ecuador, 1° de longitud recorre unos 111 km, pero a latitud 60° norte solo unos 56 km. \(\sin^2\theta\) expresa esa "diferencia de distancia según el lugar".
✅ Verificación de comprensión: ¿Cuál es la razón geométrica de que la componente \(g_{33} = r^2\sin^2\theta\) del tensor métrico en coordenadas esféricas 3D dependa de \(\theta\)?
Respuesta
Porque el radio de la circunferencia en la dirección \(\varphi\) es \(r\sin\theta\), que varía con el ángulo cenital \(\theta\). Es máximo en el ecuador (\(\theta = \pi/2\)) y se hace cero en los polos (\(\theta = 0\) o \(\pi\)).
🟡 Lina: Hasta ahora hemos encontrado el tensor métrico en 3 sistemas de coordenadas. Mei, ¿puedes resumirlo?
⚪ Mei: Lo intento. Cómo cambia la forma según el sistema de coordenadas.
Tabla 6.1: Comparación del tensor métrico en distintos sistemas de coordenadas
| Sistema de coordenadas | Elemento de línea \(ds^2\) | \(g_{ij}\) (forma matricial) | Curvatura del espacio |
|---|---|---|---|
| 2D cartesianas \((x, y)\) | \(dx^2 + dy^2\) | \(\mathrm{diag}(1, 1)\) | Plano |
| 2D polares \((r, \theta)\) | \(dr^2 + r^2\,d\theta^2\) | \(\mathrm{diag}(1, r^2)\) | Plano |
| 3D esféricas \((r, \theta, \varphi)\) | \(dr^2 + r^2\,d\theta^2 + r^2\sin^2\theta\,d\varphi^2\) | \(\mathrm{diag}(1, r^2, r^2\sin^2\theta)\) | Plano |
📝 Ejercicios:
Métrica de la esfera — un ejemplo de espacio curvado¶
🟡 Lina: Hasta ahora solo habíamos escrito un espacio plano en coordenadas curvilíneas. Ahora veamos un ejemplo de un espacio realmente curvado. La superficie de una esfera de radio \(a\) (un espacio curvado bidimensional), descrita con las coordenadas \((u^1, u^2) = (\theta, \varphi)\):
El tensor métrico es — como es bidimensional, una matriz \(2 \times 2\), con \((u^1, u^2) = (\theta, \varphi)\) en ese orden:
🔵 Kai: Un momento, ¿esto no es simplemente tomar las partes \(g_{22}\) y \(g_{33}\) de las coordenadas esféricas 3D y fijar \(r = a\) (constante)?
🟡 Lina: Buena observación. La esfera es una superficie 2D inmersa en el espacio 3D, así que la métrica del espacio 3D con \(r\) fijado da la métrica de la "sección" que es la esfera.
🔵 Kai: Pero en el plano plano con coordenadas polares, el tensor métrico también dependía del lugar (\(g_{22} = r^2\)). En la esfera también depende del lugar. ¿Se puede decir que está "curvado" solo porque el tensor métrico depende del lugar?
🟡 Lina: Buena pregunta. En realidad, el mero hecho de que el tensor métrico dependa del lugar no permite determinar si el espacio está curvado o no. Incluso en un espacio plano, si usas coordenadas curvilíneas, \(g_{ij}\) depende del lugar. En un espacio verdaderamente curvado, no importa qué coordenadas uses, no es posible (globalmente) hacer que \(g_{ij}\) sea constante. Para esta determinación se necesita el tensor de curvatura de Riemann, que aprenderemos en capítulos posteriores. Por ahora, recuerda solo que "tensor métrico que depende del lugar ≠ espacio curvado".
⚪ Mei: Es decir, "la curvatura de las coordenadas" y "la curvatura del espacio" son conceptos diferentes, y necesitamos una herramienta adicional para distinguirlos.
✅ Verificación de comprensión: Cuando las componentes del tensor métrico dependen del lugar, ¿qué se necesita para determinar si el espacio está realmente curvado?
Respuesta
Se necesita el tensor de curvatura de Riemann. El mero hecho de que el tensor métrico dependa del lugar no permite juzgar la curvatura del espacio (incluso en un espacio plano, usando coordenadas curvilíneas, la métrica depende del lugar).
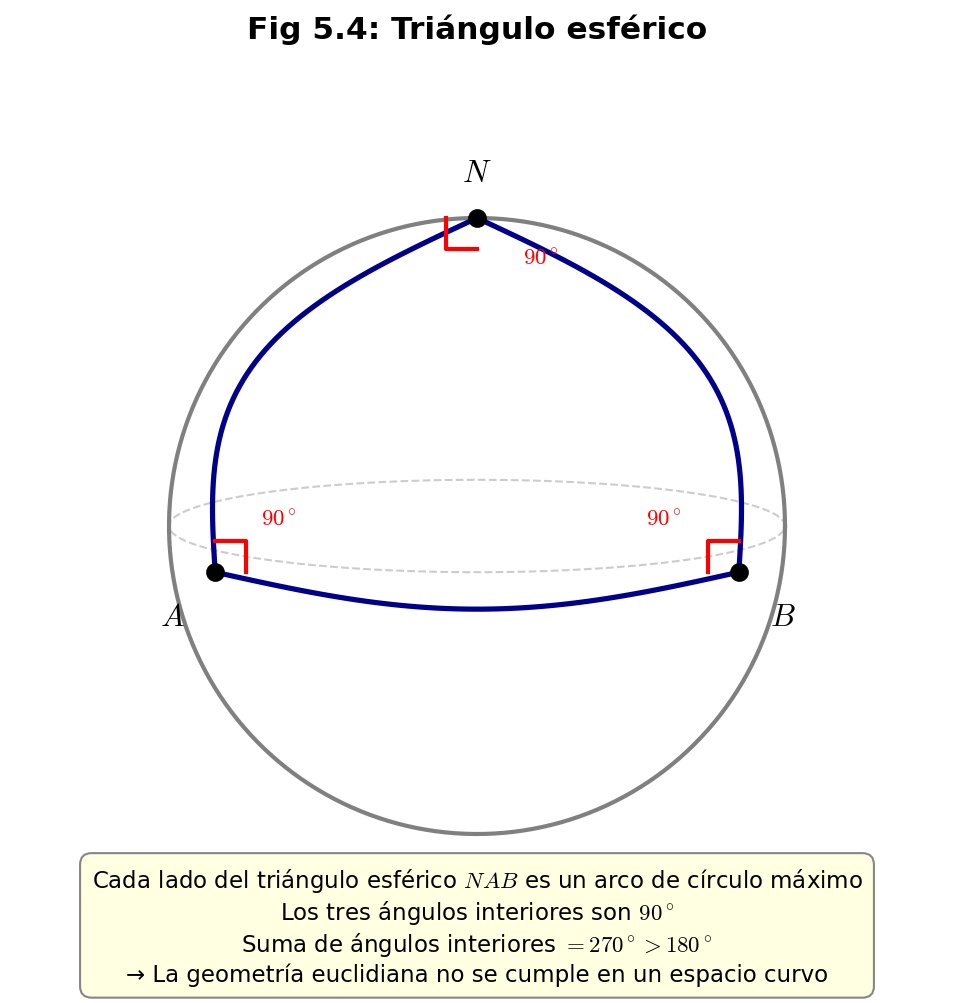 Fig. 6.5: Triángulo esférico NAB. Los tres ángulos interiores son 90°, por lo que la suma es 270° > 180°. Un ejemplo intuitivo de que la geometría euclidiana no se cumple en un espacio curvo.
Fig. 6.5: Triángulo esférico NAB. Los tres ángulos interiores son 90°, por lo que la suma es 270° > 180°. Un ejemplo intuitivo de que la geometría euclidiana no se cumple en un espacio curvo.
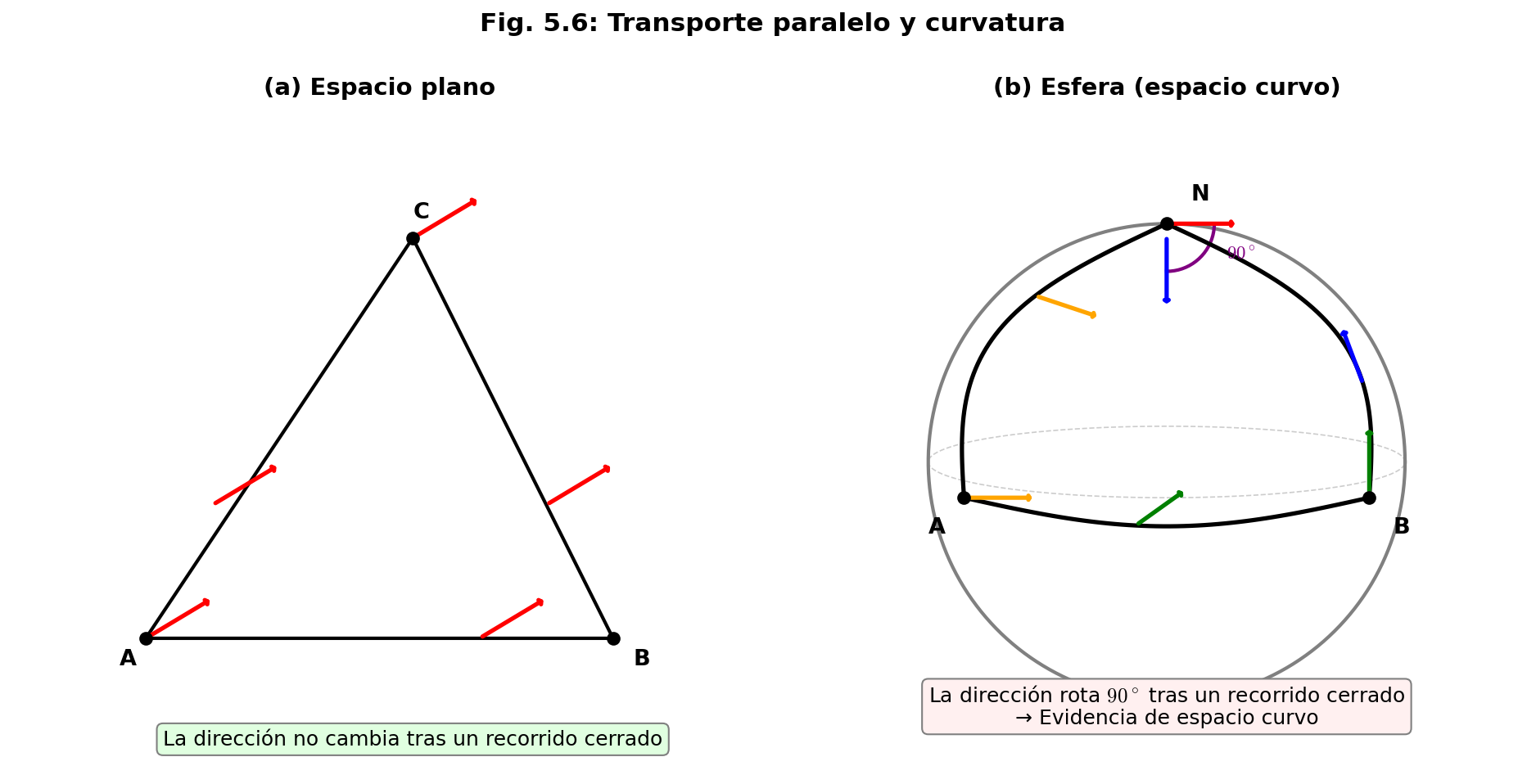 Fig. 6.6: En un espacio plano, un vector no cambia de dirección tras recorrer un circuito cerrado. En una esfera, rota 90°. Este es el método esencial para detectar la "curvatura del espacio" y da el significado intuitivo del tensor de curvatura de Riemann.
Fig. 6.6: En un espacio plano, un vector no cambia de dirección tras recorrer un circuito cerrado. En una esfera, rota 90°. Este es el método esencial para detectar la "curvatura del espacio" y da el significado intuitivo del tensor de curvatura de Riemann.
6.5 Ley de transformación del tensor métrico¶
Derivación de la ley de transformación a partir de la invariancia de la distancia¶
🟡 Lina: La propiedad más importante del tensor métrico es que cuando se cambian las coordenadas, las componentes se transforman de modo que la distancia \(ds^2\) no cambie. Derivemos esto matemáticamente.
Sea \(g_{ij}\) la métrica en un sistema de coordenadas \((x^1, x^2)\) y \(g'_{ij}\) la métrica en otro sistema \((u^1, u^2)\). Aquí \((x^1, x^2)\) no tiene por qué ser coordenadas cartesianas — cualquier sistema puede ser el punto de partida. Como la distancia no depende de la elección de coordenadas:
Aquí sustituimos \(dx^i = \dfrac{\partial x^i}{\partial u^k}\,du^k\) en el lado izquierdo. De forma análoga escribimos \(dx^j = \dfrac{\partial x^j}{\partial u^l}\,du^l\). Usamos una letra diferente \(l\) en lugar de \(k\) porque en la expansión de \(dx^i\) ya se usa \(k\) como índice mudo (índice de suma) — si usáramos el mismo \(k\) para la expansión de \(dx^j\), el \(k\) aparecería más de 2 veces en la misma expresión y sería ambiguo "cuántas veces se suma sobre \(k\)". Usando otra letra \(l\), queda claro que \(k\) y \(l\) recorren independientemente de 1 a 2 (una doble suma \(\sum_k \sum_l\)). Entonces:
Por otro lado, el lado derecho era \(ds^2 = g'_{kl}\,du^k\,du^l\). Es decir:
🔵 Kai: Como en ambos lados se multiplica por el mismo \(du^k\,du^l\), los coeficientes internos deberían ser iguales… ¿verdad?
🟡 Lina: Intuitivamente es correcto. Sin embargo, como \(du^k\,du^l\) es simplemente un producto de números (escalares), hay que mostrar con cuidado que "se cumple para cualquier dirección". Esta igualdad debe cumplirse para cualquier dirección del desplazamiento infinitesimal \((du^1, du^2)\) que elijamos. A partir de ahí demostramos que "los coeficientes son iguales". Primero captemos la intuición con una analogía de una variable. Si \(ax^2 + bx + c = a'x^2 + b'x + c'\) se cumple para todo \(x\), sustituyendo \(x = 0\) obtenemos \(c = c'\), con \(x = 1\) obtenemos \(a + b = a' + b'\), con \(x = -1\) obtenemos \(a - b = a' - b'\) — con solo probar 3 valores determinamos \(a = a'\), \(b = b'\), \(c = c'\). El punto es que "con tantas condiciones independientes como incógnitas, se determina todo". La misma idea vale para dos variables. Como vimos en §4, \(g'_{kl}\) es simétrico (\(g'_{12} = g'_{21}\)), así que las componentes independientes a determinar son solo 3: \(g'_{11}\), \(g'_{12}\), \(g'_{22}\). Para determinar 3 incógnitas basta con probar 3 direcciones — igual que resolver un sistema de ecuaciones. Hagámoslo concretamente:
- Dirección 1: Hacemos \(du^2 = 0\) y solo movemos \(du^1\). Entonces ambos lados dan \(g'_{11}(du^1)^2 = \bigl(g_{ij}\frac{\partial x^i}{\partial u^1}\frac{\partial x^j}{\partial u^1}\bigr)(du^1)^2\). Como \((du^1)^2 \neq 0\), podemos dividir y determinar el valor de \(g'_{11}\)
- Dirección 2: Haciendo \(du^1 = 0\), de forma análoga se determina \(g'_{22}\)
- Dirección 3: Para determinar \(g'_{12}\), necesitamos una dirección donde \(du^1\) y \(du^2\) sean ambos distintos de cero. La elección más sencilla es \(du^1 = du^2 = \epsilon\) (la misma cantidad infinitesimal); entonces el lado izquierdo es \((g'_{11} + 2g'_{12} + g'_{22})\epsilon^2\), y el derecho es
Dividimos por \(\epsilon^2 \neq 0\), restamos los términos correspondientes a \(g'_{11}\) y \(g'_{22}\) determinados en las direcciones 1 y 2, y queda \(2g'_{12} = 2g_{ij}\frac{\partial x^i}{\partial u^1}\frac{\partial x^j}{\partial u^2}\), con lo que \(g'_{12}\) también queda unívocamente determinado.
⚪ Mei: Con solo probar 3 direcciones se determinan todas las componentes independientes — es realmente la misma idea que la comparación de coeficientes de polinomios.
🔵 Kai: Un momento. Determinamos \(g'_{11}\) y \(g'_{22}\) con las direcciones 1 y 2, y \(g'_{12}\) con la dirección 3 — es decir, con 3 direcciones se determinan las 3 incógnitas. Pero elegir \(du^1 = du^2 = \epsilon\) en la dirección 3 fue por conveniencia; ¿con otra combinación se obtiene el mismo \(g'_{12}\)?
🟡 Lina: Así es. De este modo, las 3 componentes independientes \(g'_{11}\), \(g'_{12}\), \(g'_{22}\) han quedado todas unívocamente determinadas. Como una matriz simétrica solo tiene 3 componentes independientes, una vez determinadas esas 3, toda la matriz queda determinada.
::: {.callout-note collapse="true" title="Complemento: ¿Por qué 3 direcciones son suficientes?"} Para verificar — si sustituyéramos otra dirección, por ejemplo \(du^1 = 1\), \(du^2 = 3\), el lado izquierdo sería \(g'_{11} + 6g'_{12} + 9g'_{22}\), y el derecho daría el mismo valor. Esto es porque las 3 componentes ya fueron determinadas por las direcciones 1-3, y el valor de cualquier forma cuadrática en cualquier dirección queda determinado únicamente por estas 3 componentes. Es decir, si dos formas cuadráticas coinciden en 3 direcciones independientes, coinciden en todas — exactamente como dos funciones cuadráticas que coinciden en 3 puntos son la misma función. :::
En resumen:
🔵 Kai: Ya veo, en 2 dimensiones hay 3 componentes independientes (por la simetría), y con 3 direcciones se determinan todas… ¿en \(n\) dimensiones también es la misma idea, eligiendo tantas direcciones como componentes independientes? Pero elegir la "dirección diagonal" \(du^1 = du^2 = \epsilon\) me parece un poco tramposo. ¿Se puede usar otra dirección?
🟡 Lina: Buena pregunta. Otra dirección — por ejemplo \(du^1 = \epsilon\), \(du^2 = 2\epsilon\) — también funciona. Lo esencial es que después de determinar \(g'_{11}\) y \(g'_{22}\), basta elegir una dirección donde ambos \(du^1\) y \(du^2\) sean distintos de cero para determinar \(g'_{12}\). Cualquier dirección que elijas da el mismo \(g'_{12}\) — esa es la consecuencia de "cumplirse para cualquier dirección". En \(n\) dimensiones, eligiendo \(n(n+1)/2\) direcciones se determinan todas las componentes.
🔵 Kai: Es decir, como el número de ecuaciones (las direcciones que podemos elegir) es mayor o igual al número de incógnitas (componentes independientes), todo queda determinado. La misma idea que un sistema de ecuaciones.
🟡 Lina: Exacto. Intuitivamente, "que la distancia coincida para cualquier dirección del desplazamiento infinitesimal" exige que todos los coeficientes de la fórmula de la distancia coincidan — igual que si dos polinomios son iguales para todo \(x\), los coeficientes de cada grado son iguales. Esta es la ley de transformación del tensor métrico. Las componentes de la matriz jacobiana \(\dfrac{\partial x^i}{\partial u^k}\) aparecen multiplicadas 2 veces. En lenguaje tensorial, esto muestra que el tensor métrico es un tensor covariante de rango 2 (rank-2 covariant tensor) — un tensor con 2 índices inferiores. En Cap. 2 aprendimos que "el rango de un tensor es el número de índices". \(g_{kl}\) tiene 2 índices inferiores así que es de "rango 2", y que la ley de transformación lleve 2 matrices jacobianas es la manifestación de ello.
🔵 Kai: ¿Qué es "covariante"?
🟡 Lina: Buena pregunta. Los tensores se clasifican en 2 tipos según la diferencia en su ley de transformación. Los tensores cuya ley de transformación usa \(\dfrac{\partial x^i}{\partial u^k}\) — es decir, "la derivada de la coordenada antigua respecto a la nueva" — se llaman tensores covariantes y sus índices se escriben abajo. Por ejemplo, la ley de transformación del tensor métrico \(g'_{kl} = \dfrac{\partial x^i}{\partial u^k}\dfrac{\partial x^j}{\partial u^l}\,g_{ij}\) tiene exactamente esta forma. Por el contrario, los que usan \(\dfrac{\partial u^k}{\partial x^i}\) (las componentes de la matriz inversa) se llaman tensores contravariantes y sus índices se escriben arriba — por ejemplo, el desplazamiento infinitesimal \(du^k = \dfrac{\partial u^k}{\partial x^i}\,dx^i\) se transforma de forma contravariante.
🔵 Kai: ¿Por qué es necesario distinguir entre los 2 tipos?
🟡 Lina: Porque según la magnitud física, "la forma en que se transforma al cambiar coordenadas" es diferente. Pensemos con el ejemplo más fácil de entender. Supón que cambias la unidad de longitud de metros a centímetros — esto es "hacer la escala de las coordenadas uniformemente 100 veces más fina", la transformación de coordenadas más simple. El mismo desplazamiento tiene un valor numérico 100 veces mayor (\(du^k\) se hace más grande) — cuando la escala se hace más fina, se necesita un número mayor para representar la misma distancia. Por ejemplo, un desplazamiento de 3 m es 300 cm — el valor numérico se hace más grande. Esto es una transformación contravariante.
🔵 Kai: ¿Y hay algo que se haga más pequeño?
🟡 Lina: Sí. Piensa en "el cambio de temperatura por metro". Si la temperatura sube 2℃ por cada metro que avanzas, por centímetro solo sube 0.02℃ — el valor numérico se reduce a 1/100 (el gradiente \(\partial f/\partial u^k\) se hace más pequeño). Cuando la escala se hace más fina, la cantidad de cambio por división se hace más pequeña. Esto es una transformación covariante. Es decir, ante la misma transformación de coordenadas, hay cosas cuyo valor numérico se hace más grande (contravariante, índice superior) y cosas cuyo valor se hace más pequeño (covariante, índice inferior) — la "dirección" de la transformación es opuesta.
⚪ Mei: El desplazamiento se hace numéricamente más grande cuando la escala se afina, y el gradiente se hace más pequeño — como la dirección de la transformación es opuesta, se llaman "contravariante" y "covariante".
🟡 Lina: Sí. El ejemplo del cambio de unidades es el caso más simple donde la escala cambia uniformemente, pero incluso cuando la escala varía de un lugar a otro, como en coordenadas polares, ocurre lo mismo. Por ejemplo, donde \(r\) es grande, al cambiar \(\theta\) en 1 radián la distancia real recorrida es proporcional a \(r\) — es decir, la "distancia real" por división es grande. Por lo tanto, para representar el mismo desplazamiento físico (digamos 1 m), el valor numérico de \(d\theta\) necesario es más pequeño — esto es un comportamiento contravariante.
🔵 Kai: ¿Y el covariante? ¿La historia del gradiente de temperatura se aplica también a coordenadas polares?
🟡 Lina: Exacto. Pensemos concretamente. Supón que en una habitación la temperatura sube 2℃ por cada metro en la dirección \(x\) — esto es "un cambio de temperatura espacialmente uniforme". Si describimos este campo de temperatura en coordenadas polares, el gradiente de temperatura en la dirección \(\theta\), \(\partial T/\partial\theta\), se hace numéricamente más grande cuanto mayor es \(r\). La razón es que donde \(r\) es grande, la distancia real recorrida por radián es proporcionalmente más larga, así que el cambio de temperatura acumulado es mayor. Por ejemplo, con \(r = 1\) m, en 1 radián avanzas 1 m así que el cambio de temperatura es unos 2℃, pero con \(r = 5\) m, en 1 radián avanzas 5 m así que el cambio de temperatura es unos 10℃ — el valor numérico de \(\partial T/\partial\theta\) se multiplica por 5. Esto es un comportamiento covariante. Sin hacer bien esta distinción, no se pueden escribir leyes físicas independientes de las coordenadas. Los detalles los trataremos sistemáticamente en el próximo capítulo, pero por ahora solo recuerda que "el tensor métrico tiene 2 índices inferiores = covariante".
🔵 Kai: Sinceramente, todavía no me queda claro la distinción "covariante" vs "contravariante"… pero por ahora me quedo con que "el tensor métrico tiene 2 índices inferiores".
🟡 Lina: Con eso es suficiente. En esta etapa, basta con entender que "se les da nombres diferentes porque la forma de la ley de transformación es diferente". En el próximo capítulo verás muchos ejemplos concretos y se te hará natural.
📝 Ejercicios:
- Ley de transformación y simetría del tensor métrico → Problema B-6. Aplicación de la ley de transformación del tensor métrico, Problema M-1. Transformación de coordenadas \((u, v)\) y tensor métrico, Problema M-2. Derivación del elemento de línea en coordenadas esféricas, Problema M-3. Tensor métrico en coordenadas parabólicas, Problema M-4. Demostración de la simetría del tensor métrico, Problema M-7. Derivación de \(g'_{33}\) mediante la ley de transformación del tensor métrico
Verificación con un ejemplo concreto¶
🟡 Lina: Verifiquemos que la ley de transformación es correcta con la transformación de coordenadas cartesianas a polares. Aquí las \((x^1, x^2)\) de la teoría general son las coordenadas cartesianas \((x, y)\), y las \((u^1, u^2)\) son las coordenadas polares \((r, \theta)\).
La métrica en coordenadas cartesianas es \(g_{ij} = \delta_{ij}\) (matriz identidad). Las componentes de la matriz jacobiana son:
Calculamos \(g'_{11}\) (componente \(r\)-\(r\)). En la ley de transformación con \(k = l = 1\) (es decir, \(r\)), como \(g_{ij} = \delta_{ij}\), solo sobreviven los términos con \(i = j\):
Calculamos \(g'_{22}\) (componente \(\theta\)-\(\theta\)):
Calculamos \(g'_{12}\) (componente \(r\)-\(\theta\)):
🔵 Kai: ¡Bien, se reproduce correctamente la métrica de coordenadas polares \(g_{ij} = \mathrm{diag}(1, r^2)\) que habíamos encontrado antes! Pero si el sistema de coordenadas de partida no fuera el cartesiano sino, por ejemplo, otro curvilíneo, ¿la misma ley de transformación permite obtener la métrica?
🟡 Lina: Por supuesto. Esta ley de transformación se cumple sin importar cuál sea el sistema de coordenadas de partida. No es necesario partir de coordenadas cartesianas. En este caso, como \(g_{ij} = \delta_{ij}\), el cálculo fue simple, pero si por ejemplo quieres transformar de coordenadas polares a parabólicas, puedes usar \(g_{ij} = \mathrm{diag}(1, r^2)\) como punto de partida y aplicar la misma ley — inténtalo en los problemas.
🔵 Kai: Es tranquilizador que la misma fórmula funcione sin importar el punto de partida. Pero si repites la transformación de coordenadas 3 veces — por ejemplo cartesianas → polares → parabólicas → otras — ¿la métrica final se determina solo por "la relación entre las primera y última coordenadas"? ¿El camino intermedio no importa?
🟡 Lina: Exacto. Si aplicas la ley de transformación 2 veces sucesivas, obtienes el mismo resultado que aplicar una vez la matriz jacobiana de la transformación compuesta (obtenida por la regla de la cadena). Sin importar qué coordenadas intermedias uses, el resultado final es el mismo — esto es la manifestación de que "el tensor métrico depende de las coordenadas, pero la distancia como cantidad física no depende de las coordenadas". Verifícalo en los problemas.
✅ Verificación de comprensión: En la ley de transformación del tensor métrico, ¿cuántas componentes de la matriz jacobiana multiplican?
Respuesta
- Como en \(g'_{kl} = \frac{\partial x^i}{\partial u^k}\frac{\partial x^j}{\partial u^l} g_{ij}\), por cada índice se multiplica una matriz jacobiana. Como el tensor métrico es un tensor covariante de rango 2, son 2.
6.6 Qué significa "la regla de medir cambia según el lugar"¶
Longitud de los vectores base coordenados¶
🟡 Lina: Profundicemos un poco más en el significado del tensor métrico. Consideremos los vectores base \(\boldsymbol{e}_r\) y \(\boldsymbol{e}_\theta\) de las coordenadas polares.
En relatividad general, es estándar usar no vectores unitarios con longitud normalizada a 1, sino una base que refleja directamente la estructura de las coordenadas — la razón la explicaré enseguida. Esta base se llama base coordenada (coordinate basis). Intuitivamente, es "el vector que representa cuánto te desplazas realmente cuando cambias una sola coordenada en 1 unidad, manteniendo las demás fijas". \(\boldsymbol{e}_r\) es "la tasa de desplazamiento al avanzar en la dirección \(r\) con \(\theta\) fijo", y \(\boldsymbol{e}_\theta\) es "la tasa de desplazamiento al avanzar en la dirección \(\theta\) con \(r\) fijo".
🔵 Kai: "Cambiar en 1" significa, para \(r\) un metro y para \(\theta\) un radián, ¿verdad?
🟡 Lina: Pregunta aguda. Matemáticamente hablando con precisión, es la derivada parcial del vector posición \(\boldsymbol{r}\) respecto a la coordenada \(u^i\), \(\partial\boldsymbol{r}/\partial u^i\) — "el límite del desplazamiento \(\Delta\boldsymbol{r}\) cuando se cambia la coordenada en una cantidad infinitesimal \(\Delta u^i\), dividido por \(\Delta u^i\)". Intuitivamente puedes pensar en "el desplazamiento al cambiar la coordenada \(u^i\) en 1", pero esto es el resultado de una operación de límite usando la definición de derivada, no que realmente se mueva un radián finito — es la misma sensación de que la derivada es "la pendiente de la tangente". "Derivar un vector parcialmente" puede sonar difícil, pero lo que se hace es simple. El vector posición de un punto en el plano se escribe usando los vectores base unitarios cartesianos \(\boldsymbol{e}_x\), \(\boldsymbol{e}_y\) (flechas de longitud 1 apuntando en las direcciones \(x\) e \(y\), que no cambian de dirección ni longitud según el lugar — vectores constantes) como \(\boldsymbol{r} = x\,\boldsymbol{e}_x + y\,\boldsymbol{e}_y\). "Derivar parcialmente un vector" significa simplemente derivar parcialmente cada componente \(x\), \(y\). Como \(\boldsymbol{e}_x\), \(\boldsymbol{e}_y\) son constantes, se sacan fuera de la derivada, y la derivada parcial solo actúa sobre las partes \(x, y\). Sustituyendo \(x = r\cos\theta\), \(y = r\sin\theta\) y derivando parcialmente:
🔵 Kai: La longitud de \(\boldsymbol{e}_r\) es… \(\sqrt{\cos^2\theta + \sin^2\theta} = 1\). La longitud de \(\boldsymbol{e}_\theta\) es… \(\sqrt{r^2\sin^2\theta + r^2\cos^2\theta} = r\).
🟡 Lina: Sí. La longitud de \(\boldsymbol{e}_\theta\) es igual a \(r\) — cuanto más lejos del origen, más grande.
🔵 Kai: Lo he calculado yo mismo pero… ¿no es raro que la longitud de un vector base varíe según el lugar? Los vectores unitarios \(\hat{\boldsymbol{e}}_r\), \(\hat{\boldsymbol{e}}_\theta\) que aprendimos en el instituto ambos tenían longitud 1; ¿por qué no los normalizamos?
🟡 Lina: Buena pregunta. Los \(\hat{\boldsymbol{e}}_r\), \(\hat{\boldsymbol{e}}_\theta\) del instituto son la base normalizada (normalized basis) — con longitud ajustada a 1. En cambio, los \(\boldsymbol{e}_r\), \(\boldsymbol{e}_\theta\) que usamos aquí son la base coordenada — el desplazamiento natural al cambiar la coordenada en 1. En relatividad general se usa la base coordenada como estándar. La razón es que con la base coordenada, la fórmula de distancia \(ds^2 = g_{ij}\,du^i\,du^j\) se puede leer directamente como "el producto interno de los vectores base" — si normalizas, esta correspondencia se rompe y la ley de transformación del tensor métrico se complica. Mira de nuevo la Fig. 6.3「El mismo plano bidimensional cubierto por dos sistemas de coordenadas」 — ¿ves que la malla de coordenadas polares se ensancha al alejarse del origen? Eso es precisamente la manifestación de que la longitud de \(\boldsymbol{e}_\theta\) es proporcional a \(r\). Cerca del origen el espaciado de la malla en dirección \(\theta\) es estrecho (\(\boldsymbol{e}_\theta\) es corto), lejos es ancho (\(\boldsymbol{e}_\theta\) es largo) — eso es que la longitud de la base coordenada cambia según el lugar.
🔵 Kai: Ya veo. Cerca del origen, \(\boldsymbol{e}_\theta\) es una flecha corta, y lejos es una flecha larga.
🟡 Lina: Exacto. Y de hecho, el producto interno entre vectores base coordenados es exactamente las componentes del tensor métrico. Veamos por qué. El vector desplazamiento infinitesimal se escribe \(d\boldsymbol{r} = \boldsymbol{e}_i\,du^i\) (por la definición de base coordenada). El cuadrado de la distancia es \(ds^2 = d\boldsymbol{r} \cdot d\boldsymbol{r}\), así que:
Por otro lado, por la definición del tensor métrico \(ds^2 = g_{ij}\,du^i\,du^j\). Comparando:
⚪ Mei: No sabía que \(g_{ij}\) era "el producto interno de los vectores base"… el significado del tensor métrico se ha vuelto muy concreto.
🟡 Lina: Por cierto, ahora estamos considerando un sistema de coordenadas inmerso en un espacio plano, así que podemos definir la base usando el "vector posición"; pero en un espacio curvado general, el vector posición no se puede usar. En ese caso se necesita otra forma de definirla — eso también lo veremos en capítulos posteriores.
⚪ Mei: Verifico concretamente. \(g_{11} = \boldsymbol{e}_r \cdot \boldsymbol{e}_r = \cos^2\theta + \sin^2\theta = 1\), \(g_{22} = \boldsymbol{e}_\theta \cdot \boldsymbol{e}_\theta = r^2\sin^2\theta + r^2\cos^2\theta = r^2\), \(g_{12} = \boldsymbol{e}_r \cdot \boldsymbol{e}_\theta = -r\sin\theta\cos\theta + r\sin\theta\cos\theta = 0\). Efectivamente coincide.
🟡 Lina: Este es el significado geométrico del tensor métrico. \(g_{ij}\) contiene toda la información sobre "qué tan largos son los vectores base coordenados y qué ángulo forman entre sí".
✅ Verificación de comprensión: ¿Qué relación existe entre las componentes del tensor métrico \(g_{ij}\) y los vectores base coordenados \(\boldsymbol{e}_i\)?
Respuesta
\(g_{ij} = \boldsymbol{e}_i \cdot \boldsymbol{e}_j\) (producto interno entre vectores base coordenados). Las componentes diagonales \(g_{ii}\) son el cuadrado de la longitud de los vectores base, y las no diagonales \(g_{ij}\) (\(i \neq j\)) contienen la información del ángulo entre vectores base.
📝 Ejercicios:
- Base coordenada, curvatura de la esfera, superficie cilíndrica, coordenadas de Rindler → Problema B-7. Componentes cartesianas de los vectores base coordenados, Problema M-5. Métrica de la superficie cilíndrica y planitud, Problema M-6. Geometría de un "círculo" sobre una superficie esférica, Problema A-1. Tensor métrico en coordenadas curvilíneas generales, Problema A-2. Coordenadas de Rindler
La verdadera naturaleza de "la regla de medir cambia según el lugar"¶
🟡 Lina: Resumamos. "La regla de medir cambia según el lugar" significa concretamente lo siguiente:
Las componentes del tensor métrico \(g_{ij}\) son funciones de las coordenadas — es decir, "cuánto te desplazas realmente al cambiar el valor de la coordenada en 1" difiere según el lugar.
🔵 Kai: En coordenadas polares, la distancia recorrida al cambiar \(\theta\) en 1 radián es proporcional a \(r\). Cerca del origen es corta, lejos es larga.
🟡 Lina: Sí. Y recuerda la métrica de la esfera de §4. La esfera es bidimensional así que tiene 2 coordenadas — tomando \((u^1, u^2) = (\theta, \varphi)\) en ese orden, \(g_{ij} = \mathrm{diag}(a^2,\; a^2\sin^2\theta)\). Observa que en las coordenadas esféricas 3D de §4, \(\varphi\) era la tercera coordenada así que era \(g_{33}\), pero ahora en la esfera bidimensional \(\varphi\) es la segunda coordenada así que se convierte en \(g_{22}\) — el número del índice se determina por el orden de las coordenadas.
🔵 Kai: Ah, el mismo \(a^2\sin^2\theta\) puede ser \(g_{33}\) o \(g_{22}\) según qué número de coordenada sea.
🟡 Lina: Este \(g_{22} = a^2\sin^2\theta\) significa que la distancia recorrida al cambiar \(\varphi\) en 1 radián es \(\sqrt{g_{22}}\cdot 1 = a\sin\theta\) — máxima en el ecuador (\(\theta = \pi/2\)) con valor \(a\), y 0 en el polo (\(\theta = 0\)). Mirando la Fig. 6.7「Métrica de la esfera y espaciado de líneas coordenadas」, se ve que cerca del ecuador el espaciado entre meridianos es ancho, y cerca del polo es estrecho. Eso es ver con los ojos el significado geométrico de \(g_{22} = a^2\sin^2\theta\).
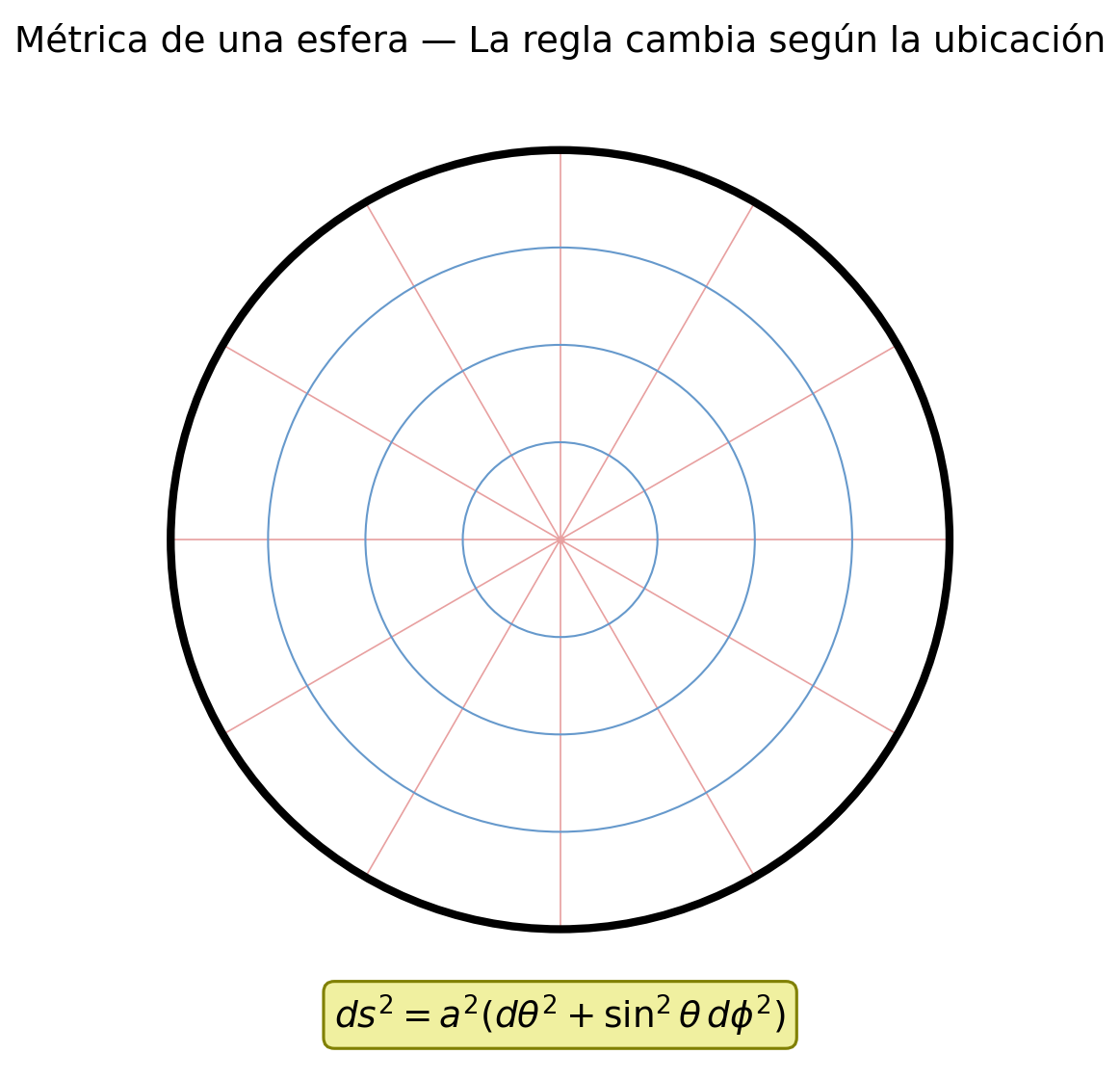
Fig. 6.7: Métrica de la esfera y espaciado de líneas coordenadas. Cerca del ecuador el espaciado entre meridianos (líneas de \(\varphi\) constante) es ancho, y cerca del polo es estrecho. Esto es la manifestación geométrica de que \(g_{22} = a^2\sin^2\theta\) depende de \(\theta\).
🟡 Lina: Reformulemos con el lenguaje de la base coordenada el punto importante mencionado en la sección de la métrica de la esfera en §4.
- Incluso en un espacio plano, si usas coordenadas curvilíneas, \(g_{ij}\) depende del lugar (ejemplo: \(g_{22} = r^2\) en polares) — pero esto se puede revertir a \(\delta_{ij}\) mediante una transformación de coordenadas. En lenguaje de base coordenada, "aunque la longitud y la orientación de los vectores base cambien según el lugar, eso se debe a la elección de coordenadas y el espacio en sí no está distorsionado"
- En un espacio verdaderamente curvado (como la esfera), no importa qué coordenadas uses, no puedes hacer \(g_{ij}\) constante (globalmente). Sin embargo, si te limitas a una región suficientemente pequeña — una región infinitesimal alrededor de un punto — siempre puedes encontrar coordenadas tales que \(g_{ij} \approx \delta_{ij}\). Esto significa "incluso un espacio curvado, si lo miras suficientemente de cerca, parece plano", la misma sensación de que la superficie terrestre parece localmente plana
⚪ Mei: Es decir, hacer la métrica de la esfera igual a \(\delta_{ij}\) se puede en la vecindad de un punto pero no globalmente — ese es el significado de "estar realmente curvado".
✅ Verificación de comprensión: ¿Se puede decir que "el espacio está curvado" simplemente porque las componentes del tensor métrico dependen del lugar?
Respuesta
No se puede decir eso. Incluso en un espacio plano, usando coordenadas curvilíneas el tensor métrico depende del lugar (ejemplo: \(g_{22} = r^2\) en coordenadas polares). Para determinar si realmente está curvado se necesita el tensor de curvatura de Riemann.
6.7 Extensión al espaciotiempo 4-dimensional¶
🟡 Lina: Por último, extendamos la discusión hasta ahora al espaciotiempo 4-dimensional. Si las coordenadas son \((x^0, x^1, x^2, x^3)\), el elemento de línea (line element) es:
Aquí \(\mu, \nu\) recorren de 0 a 3. Por convención, para los índices del espaciotiempo completo (0-3) se usan letras griegas \(\mu, \nu, \ldots\), y para los índices solo espaciales (1-3) se usan letras latinas \(i, j, \ldots\). En la primera parte de este capítulo escribíamos \(g_{ij}\) porque tratábamos solo las componentes espaciales; cuando tratamos el espaciotiempo 4-dimensional completo escribimos \(g_{\mu\nu}\). La matriz simétrica \(4 \times 4\) \(g_{\mu\nu}\) tiene \(\dfrac{4 \times 5}{2} = 10\) componentes independientes.
🔵 Kai: ¿Y en el espaciotiempo de Minkowski de la relatividad especial?
🟡 Lina: En coordenadas cartesianas \((t, x, y, z)\):
Es decir, \(g_{\mu\nu} = \mathrm{diag}(-c^2, 1, 1, 1)\). En los capítulos anteriores usábamos unidades naturales (\(c = 1\)) con coordenadas \((ct, x, y, z)\), y escribíamos \(\eta_{\mu\nu} = \mathrm{diag}(-1, 1, 1, 1)\). En este capítulo volvemos al sistema SI con \(x^0 = t\) (en unidades de segundos), por eso \(c^2\) aparece explícitamente. La métrica del espaciotiempo de Minkowski cambia de apariencia según la elección de coordenadas, pero ambas describen el mismo espaciotiempo plano, así que la esencia es la misma.
Convenio de notación: De este capítulo en adelante, el tensor métrico general se escribe \(g_{\mu\nu}\). El espaciotiempo de Minkowski también se representa como caso especial por \(g_{\mu\nu}\) (usaremos \(\eta_{\mu\nu}\) cuando queramos enfatizar que se trata de la métrica de Minkowski).
🔵 Kai: El signo negativo es la misma convención de signos que el invariante de Minkowski. Pero en el capítulo anterior \(\eta_{00} = -1\) y ahora \(g_{00} = -c^2\); el signo es el mismo pero la magnitud cambió, ¿por qué?
🟡 Lina: Buena pregunta. Como se advirtió al inicio del capítulo, aquí tomamos las coordenadas \((t, x, y, z)\) (\(x^0 = t\), en unidades de segundos) — una elección diferente al \((ct, x, y, z)\) de los capítulos anteriores. Queremos que la dimensión de \(ds^2\) completo sea longitud al cuadrado (m²), así que si la unidad de \(dt\) es segundos (s), para que \(g_{00}\,(dt)^2\) tenga unidades de m², \(g_{00}\) debe tener unidades de m²/s² — por eso \(g_{00} = -c^2\) (las unidades de \(c\) son m/s). Si tomáramos las coordenadas como \((ct, x, y, z)\), las unidades de \(ct\) ya serían m, así que se puede escribir adimensionalmente \(g_{\mu\nu} = \mathrm{diag}(-1, 1, 1, 1)\) — exactamente el \(\eta_{\mu\nu}\) que usábamos antes. En cualquier caso, todas las componentes son constantes, así que el espaciotiempo de Minkowski es plano.
⚪ Mei: Según cómo elijas las unidades de las coordenadas puede ser \(-1\) o \(-c^2\), pero físicamente es el mismo espaciotiempo plano — la misma estructura que la relación entre coordenadas polares y cartesianas.
🔵 Kai: Ya veo, según cómo elijas las coordenadas puede ser \(-1\) o \(-c^2\), pero la esencia es la misma. Y el hecho de que haya un signo negativo, ¿está relacionado con la estructura causal — la distinción entre el interior y el exterior del cono de luz — que aprendimos antes?
🟡 Lina: Exacto. El signo negativo que preserva la estructura causal aparece directamente en \(g_{00}\). Es decir, la forma del tensor métrico incorpora automáticamente la estructura causal del espaciotiempo.
🟡 Lina: Si cambiamos a coordenadas esféricas \((t, r, \theta, \varphi)\):
⚪ Mei: La métrica depende del lugar, pero el espaciotiempo en sí es plano. Solo hemos cambiado la elección de coordenadas.
Tabla 6.2: Métrica del espaciotiempo de Minkowski: diferencias en la notación según las coordenadas
| Coordenadas | \(g_{\mu\nu}\) | Dependencia del lugar | Curvatura del espaciotiempo |
|---|---|---|---|
| \((ct, x, y, z)\) (notación del cap. anterior) | \(\eta_{\mu\nu} = \mathrm{diag}(-1, 1, 1, 1)\) | No (constante) | Plano |
| \((t, x, y, z)\) (\(c\) explícito) | \(\mathrm{diag}(-c^2, 1, 1, 1)\) | No (constante) | Plano |
| \((t, r, \theta, \varphi)\) | \(\mathrm{diag}(-c^2, 1, r^2, r^2\sin^2\theta)\) | Sí | Plano |
🟡 Lina: Sí. Pero como anticipo, déjame mostrarte la métrica de Schwarzschild que aparecerá en los próximos capítulos — la métrica que describe el espaciotiempo exterior a un cuerpo con simetría esférica de masa \(M\) (por ejemplo, un agujero negro). \(G\) es la constante de gravitación universal:
¿Recuerdas el parámetro relativista \(GM/(Rc^2)\) (\(R\) es el radio del cuerpo) que apareció en el prólogo? El \(2GM/(rc^2)\) que aparece aquí tiene \(r\) como coordenada — representa una posición arbitraria fuera del cuerpo; en la superficie del cuerpo \(r = R\). El significado del factor 2 se aclarará en el capítulo donde se introduzca formalmente la métrica de Schwarzschild.
🔵 Kai: Vaya, comparada con la métrica de Minkowski, \(g_{00}\) y \(g_{11}\) están modificados por términos que dependen de \(r\)… si la masa \(M\) es cero, recuperas Minkowski.
🟡 Lina: Exacto. Y esta métrica no puede transformarse globalmente en la métrica de Minkowski mediante ninguna transformación de coordenadas. Eso es lo que significa "el espaciotiempo está realmente curvado".
🔵 Kai: El tensor métrico es "la regla de medir que cambia según el lugar", y dentro de cómo cambia esa regla está contenida la información de la gravedad… Pero mirando la fórmula de la métrica de Schwarzschild, en \(r = 2GM/c^2\) el denominador se hace cero. ¿Eso significa que la "regla" se estira infinitamente? ¿O el espacio realmente se rompe ahí?
🟡 Lina: Pregunta aguda. Solo adelanto la conclusión: la divergencia en \(r = 2GM/c^2\) es una singularidad de coordenadas — es decir, la elección de coordenadas es mala, pero el espaciotiempo en sí no está roto. Con otras coordenadas se puede pasar suavemente por ahí. Es precisamente una situación donde la distinción entre "curvatura de las coordenadas" y "curvatura del espacio" que aprendimos en este capítulo resulta crucial. La herramienta para determinar si es una singularidad física real o un problema de coordenadas es el tensor de curvatura de Riemann. Esto lo veremos en el capítulo donde estudiemos en detalle la métrica de Schwarzschild, así que espéralo con ganas.
⚪ Mei: La perspectiva "la curvatura de las coordenadas y la curvatura del espacio son cosas distintas" que aprendimos en este capítulo se aplica directamente ahí. Queda muy claro que el tensor métrico es el protagonista de la relatividad general.
🟡 Lina: Sí. Toda la información del campo gravitatorio está contenida en \(g_{\mu\nu}\). En el próximo capítulo, usaremos este tensor métrico para describir concretamente un "espaciotiempo con gravedad".
Anticipo del próximo capítulo¶
En Cap. 7, usaremos el tensor métrico \(g_{\mu\nu}\) para describir concretamente un "espaciotiempo con gravedad". Introduciremos formalmente la métrica de Schwarzschild anticipada en este capítulo y descifraremos qué significa cada una de sus componentes. A partir de las diferencias con la métrica de Minkowski, veremos cómo se manifiestan la dilatación temporal y la distorsión espacial debidas a la gravedad.
Problemas de práctica¶
📝 Ejercicios:
- Matriz jacobiana e inversas → Problema B-1. Jacobiano de coordenadas polares en 2 dimensiones, Problema B-5. Matriz jacobiana de una transformación lineal de coordenadas, Problema B-8. Determinante de la matriz jacobiana de la transformación inversa
- Lectura del tensor métrico y métrica inversa → Problema B-2. Métrica inversa en coordenadas esféricas tridimensionales, Problema B-3. Representación matricial de una métrica general bidimensional, Problema B-4. Tensor métrico en un punto específico sobre la esfera
- Ley de transformación y simetría del tensor métrico → Problema B-6. Aplicación de la ley de transformación del tensor métrico, Problema M-1. Transformación de coordenadas \((u, v)\) y tensor métrico, Problema M-2. Derivación del elemento de línea en coordenadas esféricas, Problema M-3. Tensor métrico en coordenadas parabólicas, Problema M-4. Demostración de la simetría del tensor métrico, Problema M-7. Derivación de \(g'_{33}\) mediante la ley de transformación del tensor métrico
- Base coordenada, curvatura de la esfera, superficie cilíndrica, coordenadas de Rindler → Problema B-7. Componentes cartesianas de los vectores base coordenados, Problema M-5. Métrica de la superficie cilíndrica y planitud, Problema M-6. Geometría de un "círculo" sobre una superficie esférica, Problema A-1. Tensor métrico en coordenadas curvilíneas generales, Problema A-2. Coordenadas de Rindler
Referencias¶
- 石井俊全『一般相対性理論を一歩一歩数式で理解する』(ベレ出版)第 3 章「テンソルと直線座標のテンソル場」・第 5 章「曲線座標のテンソル場」
- Lancaster, T. & Blundell, S. J., General Relativity for the Gifted Amateur, Ch. 3
- Schutz, B. F., A First Course in General Relativity, 3rd ed., Ch. 6
- Hartle, J. B., Gravity: An Introduction to Einstein's General Relativity, Ch. 2, Ch. 7
- 佐藤勝彦『相対性理論』(岩波基礎物理シリーズ)第 4 章「リーマン幾何学」
Feedback on this page
Let us know if something was unclear, incorrect, or could be improved.